Изобретение относится к вычислительной технике и может быть использовано для ввода информации в персональный компьютер.
При вводе информации в компьютер, наряду с клавиатурой, широко используются различные устройства управления курсором, среди которых самое широкое распространение получили манипуляторы типа "мышь". Их принцип действия основан на преобразовании перемещения корпуса "мыши" по плоскости во вращение роликов с последующей выработкой электрического сигнала, поступающего в компьютер и задающего положение курсора на экране монитора.
Наиболее близким по технической сущности к заявляемому изобретению является выбранное в качестве прототипа устройство ввода на основе комбинации "мыши" и шарового манипулятора (Combination mouse/trackball input device: Пат. 5280276 США). Данное устройство содержит шарик, контактирующий с плоской поверхностью, вращение шарика передается роликам, поворот которых с помощью фотодетекторной схемы преобразуется в электрические импульсы, определяющие положение курсора на экране монитора.
У прототипа и заявляемого изобретения имеются следующие сходные признаки: оба они являются устройствами для ввода информации в компьютер, их перемещение вырабатывает сигналы, задающие координаты курсора, оба имеют кнопки управления.
Недостатком прототипа является то, что он, представляя собой манипулятор электромеханического типа, имеет движущиеся части, которые потенциально могут быть источниками отказов и требуют регулярной профилактики. Кроме того, для данного типа манипуляторов необходима плоская поверхность для перемещения "мыши", что создает некоторые неудобства в работе, "привязывая" пользователя к определенному рабочему месту.
По отношению к прототипу у заявляемого изобретения имеются следующие отличительные признаки. Вместо электромеханического устройства, основанного на преобразовании вращения роликов в код, задающий положение курсора, используется манипулятор, содержащий два взаимно ортогональных датчика магнитного поля, параметры которых изменяются при повороте их относительно магнитного поля Земли. Используемые датчики представляют собой катушки индуктивности с подмагниченными сердечниками, магнитная проницаемость которых изменяется под действием магнитного поля, соответствующее изменение индуктивности каждой катушки преобразуется в код, поступающий через параллельный порт ввода/вывода в компьютер. Таким образом, вместо способа преобразования, соответствующего схеме "перемещение манипулятора - вращение роликов - код - координаты курсора", используется способ по схеме "поворот манипулятора - изменение индуктивности датчиков - код - координаты курсора".
Структурная схема устройства, реализующая данный способ, показана на фиг. 1. Устройство содержит параллельный порт ввода/вывода 1; коммутаторы тока 2, 7; многоканальный усилитель тока 3; кнопки управления 4, 5; манипулятор 6, состоящий из двух взаимно ортогональных датчиков магнитного поля; компаратор 8; блок опорного плеча 9; схему ИСКЛЮЧАЮЩЕЕ ИЛИ 10; преобразователь время-амплитуда 11; аналого-цифровой преобразователь 12. Цепь датчика магнитного поля наряду с катушкой индуктивности, параметры которой меняются под действием магнитного поля Земли, содержит также соединенные параллельно с ней диод и резистор. Блок опорного плеча 9 включает в себя те же элементы, что и измерительный тракт, т.е. коммутаторы, усилитель, катушки фиксированной индуктивности, компаратор.
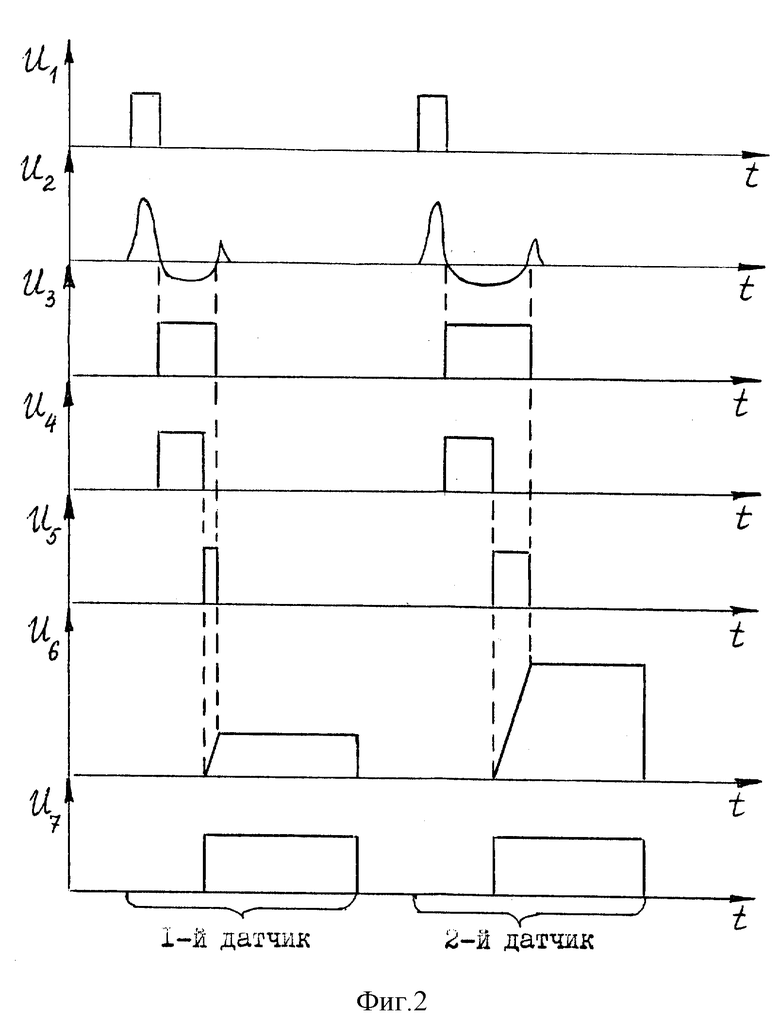
На фиг. 2 показаны эпюры, поясняющие работу устройства. Устройство работает следующим образом. Из компьютера через параллельный порт ввода/вывода 1 на адресные входы коммутаторов тока 2 и 7 поступает адрес канала, к которому подключен первый датчик магнитного поля. Затем по цепи датчика, содержащую параллельно соединенные катушку индуктивности, диод и резистор, пропускается импульс U1, усиленный многоканальным усилителем тока 3, в результате чего на входе компаратора 8 формируется сигнал U2. Длительность "отрицательной" части сигнала U2 и, соответственно, длительность импульса на выходе компаратора U3 зависит от величины индуктивности датчика, которая в свою очередь изменяется под воздействием магнитного поля Земли. Аналогичный импульс U4 (меньшей длительности, чем U3) поступает с выхода опорного плеча 9. Наличие опорного плеча позволяет избавиться от влияния дестабилизирующих факторов, например пульсации напряжения питания, нагрев компонентов схемы и т. д. Схема ИСКЛЮЧАЮЩЕЕ ИЛИ 10 формирует импульс U5, длительность которого зависит от изменения индуктивности датчика. С выхода преобразователя "время-амплитуда" 11 сигнал U6, амплитуда которого в конечном итоге зависит от ориентации датчика в магнитном поле Земли, поступает на вход аналого-цифрового преобразователя 12. Синхронно с этим в компьютер поступает сигнал логического сопровождения U7, инициирующий формирование команды запуска АЦП и считывания информации с выхода АЦП. Затем компьютер через порт выдает адрес канала, к которому подключен второй датчик магнитного поля, и процесс повторяется. Два считанных с выхода АЦП кода формируют координаты курсора на экране монитора. Нажатие кнопок управления 4 или 5 разрывает цепь датчика, в результате чего на выходе преобразователя время-амплитуда 11 не возникает сигнала логического сопровождения U7, что позволяет компьютеру обнаружить факт нажатия кнопок управления.
Модифицированным вариантом устройства является манипулятор с третьим датчиком, задающим третью координату (Z - координату) курсора. Трехкоординатный манипулятор может быть применен, в частности, в системах автоматического проектирования. В качестве датчика, задающего третью координату курсора, используется индуктивный датчик силы, представляющий собой катушку индуктивности с перемещаемым под действием пружины сердечником. Способ преобразования изменения индуктивности в код аналогичен рассмотренному выше для датчиков магнитного поля. Таким образом, изменение всех трех координат курсора осуществляется поворотом датчика в магнитном поле Земли и нажатием кнопки, деформирующей пружину третьего датчика.
Другой модификацией устройства является подключение к выходу коммутатора 3 двух манипуляторов, каждый из которых состоит либо из двух, либо из трех датчиков. Устройство ввода с двумя манипуляторами может быть применено, в частности, в компьютерных играх. Алгоритм работы устройства, поясненный приведенными на фиг.2 эпюрами напряжения, практически остается неизменным, лишь только коммутация тока осуществляется в большее количество каналов.
Положительный эффект данного технического решения состоит в том, что разработанный способ и устройство, реализованное на его основе, позволили повысить удобство работы с манипулятором, управляющим положением курсора на экране монитора, сделали возможным ввод третьей координаты курсора, что расширило возможности устройства по вводу информации в компьютер.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ СИГНАЛОВ ОТ ДАТЧИКОВ ИНДУКТИВНОГО И РЕЗИСТОРНОГО ТИПОВ | 1999 |
|
RU2168728C1 |
| УСТРОЙСТВО ВВОДА ИНФОРМАЦИИ В ЭЛЕКТРОННЫЕ ПРИБОРЫ | 2006 |
|
RU2316806C1 |
| ПРЕОБРАЗОВАТЕЛЬ ПАРАМЕТРОВ ЭЛЕКТРОМАГНИТНЫХ ДАТЧИКОВ | 2003 |
|
RU2241236C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ПАРАМЕТРОВ ДАТЧИКОВ ИНДУКТИВНОГО ТИПА | 2007 |
|
RU2339047C1 |
| УСТРОЙСТВО ВВОДА КООРДИНАТ | 2017 |
|
RU2669093C2 |
| СПОСОБ БЕСКОНТАКТНОГО ВВОДА ИНФОРМАЦИИ В КОМПЬЮТЕР И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2227930C2 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 1991 |
|
RU2015566C1 |
| СПОСОБ УПРАВЛЕНИЯ КУРСОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2275674C2 |
| УСТРОЙСТВО ВВОДА | 2009 |
|
RU2410744C1 |
| МАГНИТОМЕТРИЧЕСКАЯ СИСТЕМА НАВИГАЦИИ | 2024 |
|
RU2824864C1 |
Изобретение относится к вычислительной технике и может быть использовано для ввода информации в персональный компьютep. Техническим результатом является повышение удобства в работе манипулятором, управляющим положением курсора на экране монитора. Для этого в качестве манипулятора используют два взаимно ортогональных датчика магнитного поля, параметры которых изменяются при их повороте относительно магнитного поля Земли, содержащих каждый параллельно соединенные катушку индуктивности, диод и резистор. 2 ил.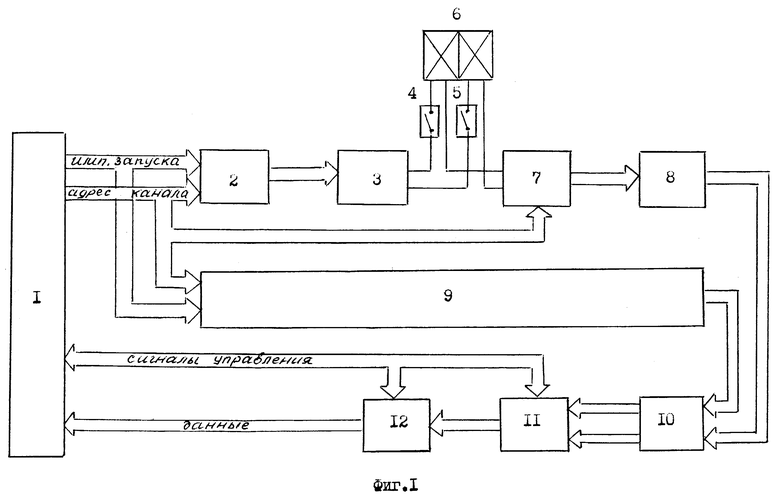
Способ ввода координат курсора, в котором формируют координаты курсора на экране монитора путем преобразования в код изменения параметров манипулятора, управляющего положением курсора на экране монитора, отличающийся тем, что в качестве упомянутого манипулятора используют два взаимно ортогональных датчика магнитного поля, параметры которых изменяются при их повороте относительно магнитного поля Земли, содержащих каждый параллельно соединенные катушку индуктивности, диод и резистор.
| US 5280276 A, 18.01.1994 | |||
| US 5552808 A, 03.09.1996 | |||
| УСТРОЙСТВО ВВОДА | 1991 |
|
RU2022335C1 |
| US 5504502 A, 02.04.1996 | |||
| АНАЛИЗАТОР ПРОЛЕТНОГО КВАДРУПОЛЬНОГО МАСС-СПЕКТРОМЕТРА (ТИПА ФИЛЬТР МАСС, "МОНОПОЛЬ" И "ТРИПОЛЬ") | 2009 |
|
RU2447539C2 |
| RU 94014467 A1, 27.02.1996 | |||
| RU 94001424 A1, 27.02.1996 | |||
| Устройство для определения магнитного курса | 1977 |
|
SU669189A1 |
