Область техники, к которой относится изобретение
Изобретение относится к области измерительной техники, навигации и предназначено для определения местоположения и ориентации объектов навигации на основе использования переменного вращающегося магнитного поля, в том числе беспилотных летательных аппаратов.
Уровень техники
Наиболее близким по технической сущности и достигаемому техническому результату является магнитометрическая система локальной навигации (прототип) [RU 2789733, C1, G01C 21/00 (2006.01), опубл. 07.02.2023, бюл. №4], состоящая из источника переменного вращающегося магнитного поля в составе трех взаимно ортогональных катушек индуктивности, источника гармонического сигнала, фазовращателя, делителя частоты и мобильной части в составе трехкоординатного датчика магнитного поля, трех полосовых фильтров настроенных на частоту навигационного поля, трех полосовых фильтров, настроенных на четную субгармонику частоты навигационного поля, последовательно соединенных сумматора, формирователя синхроимпульсов, блока вычисления локальных координат и аналого-цифрового преобразователя.
Недостатком прототипа являются низкие функциональные возможности.
Раскрытие сущности изобретения
Технический результат, обеспечиваемый изобретением, выражается в расширении функциональных возможностей прототипа за счет определения географических координат объекта навигации.
Технический результат достигается тем, что в известную магнитометрическую систему локальной навигации, содержащую стационарную часть в составе первой, второй и третьей взаимно ортогональных катушек индуктивности, источника гармонического сигнала, делителя частоты и фазовращателя, выход которого соединен с первой катушкой индуктивности, при этом выход источника гармонического сигнала соединен с объединенными входами делителя частоты, фазовращателя и второй катушкой индуктивности, и мобильной части в составе трехкоординатного датчика магнитного поля, первого, второго, третьего, четвертого, пятого и шестого полосовых фильтров, причем первые три полосовых фильтра настроены на частоту навигационного поля, а остальные три - на ее четную субгармонику, последовательно соединенные аналогово-цифровой преобразователь и блок вычисления локальных координат, последовательно соединенные сумматор и формирователь синхроимпульсов, выход которого соединен со вторым входом блока вычисления локальных координат, при этом первый, третий и пятый выходы трехкоординатного датчика магнитного поля соединены соответственно с входами первого, второго и третьего полосовых фильтров, а второй, четвертый и шестой выходы - с входами четвертого, пятого и шестого полосовых фильтров, кроме того выходы первого, второго и третьего полосовых фильтров соединены соответственно с первым, вторым и третьим входом аналогово-цифрового преобразователя, а выходы четвертого, пятого и шестого полосовых фильтров соединены соответственно с первым, вторым и третьим входом сумматора, отличающаяся тем, что в стационарную часть дополнительно введены последовательно соединенные устройство ввода информации, генератор частотно-модулированного сигнала и коммутатор, выход которого соединен с третьей катушкой индуктивности, а также блок управления, первый выход которого соединен с входом источника гармонического сигнала, а второй выход - с объединенными вторыми входами генератора частотно-модулированного сигнала и коммутатора, кроме того выход делителя соединен с третьим входом коммутатора, второй выход устройства ввода информации соединен с входом блока управления, а в мобильную часть введены последовательно соединенные демодулятор частотно-модулированного сигнала и блок вычисления географических координат, выход которого является выходом системы, при этом второй выход сумматора соединен с входом демодулятора частотно-модулированного сигнала, а второй выход блока вычисления локальных координат соединен со вторым входом блока вычисления географических координат.
Сущность изобретения заключается в том, что в состав стационарной части дополнительно введены последовательно соединенные устройство ввода информации, генератор частотно-модулированного сигнала и коммутатор, выход которого соединен с третьей катушкой индуктивности, а также блок управления, первый выход которого соединен с входом источника гармонического сигнала, а второй выход - с объединенными вторыми входами генератора частотно-модулированного сигнала и коммутатора, кроме того выход делителя соединен с третьим входом коммутатора, второй выход устройства ввода информации соединен с входом блока управления, а в мобильную часть введены последовательно соединенные демодулятор частотно-модулированного сигнала и блок вычисления географических координат, выход которого является выходом системы, при этом второй выход сумматора соединен с входом демодулятора частотно-модулированного сигнала, а второй выход блока вычисления локальных координат соединен со вторым входом блока вычисления географических координат.
В изобретении осуществляют передачу информации о географических координатах источника переменного вращающегося магнитного поля, который является стационарной частью магнитометрической системы навигации, на ее мобильную часть. Передачу информации осуществляют с помощью частотно-модулированного переменного магнитного поля, изучаемого в пространство с заданной периодичностью. В мобильной части осуществляют прием, и выделение информации о географических координатах стационарной части. С использованием этой информации осуществляют пересчет измеренных локальных координат объекта навигации относительно местоположения стационарного источника переменного вращающегося магнитного поля в географические координаты.
Краткое описание фигур
На фиг.1 приведена структурная схема магнитометрической системы навигации, где обозначены:
1 - стационарная часть;
2-1, 2-2 и 2-3 - первая, вторая и третья катушки индуктивности;
3 - источник гармонического сигнала;
4 - фазовращатель;
5 - делитель частоты;
6 - мобильная часть;
7 - трехкоординатный датчик магнитного поля;
8-1, 8-2 и 8-3 - первый, второй и третий полосовые фильтры, настроенные на частоту навигационного поля;
9-1, 9-2 и 9-3 - первый, второй и третий полосовые фильтры, настроенные на четную субгармонику частоты навигационного поля;
10 - сумматор;
11 - формирователь синхроимпульсов;
12 - блок вычисления локальных координат;
13 - аналого-цифровой преобразователь;
14 - блок управления;
15 - демодулятор частотно-модулированного сигнала;
16 - блок вычисления географических координат;
17 - устройство ввода информации;
18 - генератор частотно-модулированного сигнала;
19 - коммутатор;
20 - условное обозначение суперпозиции переменного вращающегося магнитного поля и поля синхронизации.
На фиг.2 изображена схема взаимного расположения объекта навигации и стационарного источника переменного вращающегося магнитного поля, размещенного на поверхности Земли, где обозначены: 21 - центр Земли; 22 - ось вращения Земли с северным N и южным S полюсами; 23 - экватор Земли; 24 - меридиан с долготой ϕ; 25 - радиус Земли (R); 26 - местоположение стационарного источника переменного вращающегося магнитного поля на поверхности Земли, 27 - радиус параллели с географической широтой  (R0); 28 - объект навигации. Стационарная часть 1 - источник переменного вращающегося магнитного поля находится в точке пересечения параллели с географической широты
(R0); 28 - объект навигации. Стационарная часть 1 - источник переменного вращающегося магнитного поля находится в точке пересечения параллели с географической широты  и меридиана с географической долготой ϕ.
и меридиана с географической долготой ϕ.
Перед началом работы магнитометрической системы навигации в стационарную часть 1 через устройство ввода информации 17 вводят информацию о географических координатах стационарного источника переменного вращающегося магнитного поля и о временном цикле работы магнитометрической системы навигации. Магнитометрическая система навигации последовательно работает в двух режимах: определения локальных координат и определения географических координат.
В режиме определения локальных координат работа заявленной системы аналогично прототипу.
В режиме определения географических координат с выхода блока управления 14 поступают управляющие сигналы на источник гармонического сигнала 3, на генератор частотно-модулированного сигнала 18 и на коммутатор 19.
При выключении источника гармонического сигнала 3 величина индукции навигационного магнитного поля, создаваемого первой 2-1 и второй 2-2 катушками индуктивности, становится равна нулю. Коммутатор 19 отключает от третьей катушки индуктивности 2-3 делитель частоты 5 и подключает к ней генератор частотно-модулированного сигнала 18. Выходной сигнал генератора частотно-модулированного сигнала 18 имеет центральную частоту равную частоте синхронизации, которая меняется во времени в соответствии с информационным сигналом, который формируется устройством ввода информации 17. Таким образом, третья катушка индуктивности 2-3 создает в пространстве частотно-модулированное переменное магнитное поле, которое несет информацию о географических координатах стационарного источника переменного вращающегося магнитного поля.
В мобильной части 6, с помощью трехкоординатного датчика магнитного поля 7, это частотно-модулированное переменное магнитное поле преобразуется в переменные частотно-модулированные напряжения, которые проходят через полосовые фильтры 9-1, 9-2 и 9-3, и поступают на вход сумматора 10, с выхода которого сумма этих напряжений поступает на вход демодулятора 15. Выделенный в демодуляторе 15 модулирующий сигнал, несущий информацию о географических координатах стационарного источника переменного вращающегося магнитного поля, поступает на первый вход блока вычисления географических координат 16. На второй вход блока вычисления географических координат 16 поступает сигнал с блока вычисления локальных координат 12, несущий информацию о локальных координатах объекта навигации 26 относительно местоположения стационарного источника переменного вращающегося магнитного поля на поверхности Земли 25. В блоке вычисления географических координат 16 осуществляют пересчет локальных координат объекта навигации в географические.
Алгоритм пересчета локальных координат объекта навигации в географические заключается в следующем (см. фиг.2). Стационарный источник переменного вращающегося магнитного поля 1 располагается на поверхности Земли так, чтобы первая катушка индуктивности 2-1 была сориентирована вдоль оси OZ и параллельно меридиану Земли и направлена на северный полюс N, а вторая катушка индуктивности 2-2 была сориентирована вдоль оси ОХ и была параллельна географической параллели и направлена на запад (от рисунка). В этом случае третья катушка индуктивности 2-3 будет сориентирована вдоль оси OY и направлена вверх, по вертикали.
Местоположение стационарной части 1 в локальной системе координат определяется тремя локальными координатами X, Y и Z относительно стационарного источника переменного вращающегося магнитного поля, в географической системе координат - тремя географическими координатами: широтой  , долготой ϕ и высотой h.
, долготой ϕ и высотой h.
Один градус географической широты  соответствует
соответствует  метрам, тогда географическая широта
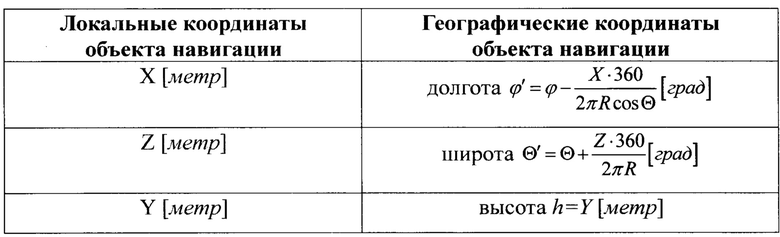
метрам, тогда географическая широта  объекта навигации находится из выражения:
объекта навигации находится из выражения:
На широте радиус параллели равен  Тогда один градус долготы соответствует
Тогда один градус долготы соответствует  метрам, тогда географическая долгота ϕ объекта навигации находится из выражения:
метрам, тогда географическая долгота ϕ объекта навигации находится из выражения:

Высота объекта навигации над поверхностью Земли равна h=Y.
Таким образом, локальные координаты объекта навигации вычисленные с помощью магнитометрической локальной системы навигации X, Z и Y в предлагаемой системе пересчитываются в географические координаты:
Осуществление изобретения
Предложенное устройство может быть практически реализовано с помощью выпускаемых промышленностью электронных компонентов, микрокомпьютеров и изделий.
Датчик магнитного поля 7, предназначенный для измерения индукций навигационного магнитного поля и поля синхронизации, может быть изготовлен на основе трех феррозондовых магнитометров DRV425 [https://www.directindustry.com.ru/prod/texas-instruments-semiconductor/product-33647-2210533.html].
Полосовые фильтры, настроенные на частоту навигационного поля 8-1, 8-2, 8-3 и полосовые фильтры, настроенные на четную субгармонику частоты навигационного поля 9-1, 9-2, 9-3 предназначены для выделения напряжений с трехкоординатного датчика магнитного поля 7 с частотами навигационного поля и четную субгармонику частоты навигационного поля соответственно. Они могут быть изготовлены на операционных усилителях, например [https://eax.me/active-filters/].
Блоки 12, 16 предназначены для цифровой обработки сигналов и вычисления локальных и географических координат объекта навигации могут быть реализованы на базе одноплатного компьютера Raspberry Pi 4 Model В [https://amperka.ru/product/raspberry-pi-4-model-b-4-gb] с платой расширения АЦП/ЦАП для Raspberry Pi (AD/DA) [смотри https://miniboard.com.ua/platy-rasshireniya/184-acpcap-plata-rasshireniya-dlya-raspberry-pi-adda.html].
Демодулятор частотно-модулированного сигнала 15 и блок вычисления географических координат 16 могут быть реализованы на базе одноплатного компьютера Raspberry Pi 4 Model В [смотри https://amperka.ru/product/raspberry-pi-4-model-b-4-gb] с платой расширения АЦП/ЦАП для Raspberry Pi (AD/DA) [https://miniboard.com.ua/platy-rasshireniya/184-acpcap-plata-rasshireniya-dlya-raspberry-pi-adda.html].
Устройство ввода информации 17 предназначено для ввода информации о географических координатах стационарного источника переменного вращающегося магнитного поля и о временном цикле работы магнитометрической системы навигации.
Блок управления 14 предназначен для управления режимами работы источник гармонического сигнала 3, генератора частотно-модулированного сигнала 18 и коммутатора 19.
Генератор частотно-модулированного сигнала 18 предназначен для формирования частотно-модулированного сигнала, частота которого меняется во времени в соответствии с информационным сигналом о географических координатах стационарного источник переменного вращающегося магнитного поля.
Коммутатор 19 предназначен для подключения к третьей катушке индуктивности 2-3 генератора частотно-модулированного сигнала 18 или делителя частоты 5.
Блок управления 14, устройство ввода информации 17 и генератор частотно-модулированного сигнала 18 могут быть реализованы на базе одноплатного компьютера Raspberry Pi с подключенной клавиатурой.
Коммутатор 19 может быть выполнен на базе электромагнитного реле [https://www.chipdip.ru/product/nrp-03k-c-12d-h].
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО МАГНИТОМЕТРИЧЕСКОЙ ЛОКАЛЬНОЙ НАВИГАЦИИ | 2022 |
|
RU2789733C1 |
| УСТРОЙСТВО МАГНИТОМЕТРИЧЕСКОЙ СИСТЕМЫ ЛОКАЛЬНОЙ НАВИГАЦИИ | 2024 |
|
RU2835981C1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ НИЗКОЧАСТОТНОГО НАВИГАЦИОННОГО МАГНИТНОГО ПОЛЯ | 2024 |
|
RU2829941C1 |
| СПОСОБ И СИСТЕМА МАГНИТОМЕТРИЧЕСКОЙ ЛОКАЛЬНОЙ НАВИГАЦИИ | 2022 |
|
RU2776319C1 |
| МАГНИТОМЕТРИЧЕСКИЙ КОМПЛЕКС ДЛЯ НАВИГАЦИИ ОБЪЕКТОВ В ПРОСТРАНСТВЕ | 2023 |
|
RU2808125C1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ВРАЩАЮЩЕГОСЯ ДИПОЛЬНОГО МАГНИТНОГО ПОЛЯ | 2022 |
|
RU2789734C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ МАГНИТНОГО ПОЛЯ | 2019 |
|
RU2713456C1 |
| Устройство измерения составляющих вектора путевой скорости | 2019 |
|
RU2715740C1 |
| СПОСОБ ПЕРСОНАЛЬНОЙ АВТОНОМНОЙ НАВИГАЦИИ | 2013 |
|
RU2523753C1 |
| Устройство для измерения параметров резонансных контуров | 1982 |
|
SU1071972A1 |


Изобретение относится к области измерительной техники, навигации и предназначено для определения местоположения и ориентации объектов, в том числе беспилотных летательных аппаратов, на основе использования переменного вращающегося магнитного поля. Технический результат выражается в расширении функциональных возможностей за счет определения географических координат объекта навигации. В стационарную часть магнитометрической системы навигации дополнительно введены последовательно соединенные устройство ввода информации, генератор частотно-модулированного сигнала и коммутатор, выход которого соединен с третьей катушкой индуктивности, а также блок управления, первый выход которого соединен с входом источника гармонического сигнала, а второй выход – с объединенными вторыми входами генератора частотно-модулированного сигнала и коммутатора. Выход делителя соединен с третьим входом коммутатора, а второй выход устройства ввода информации соединен с входом блока управления. В мобильную часть заявленной системы навигации введены последовательно соединенные демодулятор частотно-модулированного сигнала и блок вычисления географических координат, выход которого является выходом системы. При этом второй выход сумматора соединен с входом демодулятора частотно-модулированного сигнала, а второй выход блока вычисления локальных координат соединен со вторым входом блока вычисления географических координат. 2 ил., 1 табл.
Магнитометрическая система навигации, состоящая из стационарной части в составе первой, второй и третьей взаимно ортогональных катушек индуктивности, источника гармонического сигнала, делителя частоты и фазовращателя, выход которого соединен с первой катушкой индуктивности, при этом выход источника гармонического сигнала соединен с объединенными входами делителя частоты, фазовращателя и второй катушкой индуктивности, и мобильной части в составе трехкоординатного датчика магнитного поля, первого, второго, третьего, четвертого, пятого и шестого полосовых фильтров, причем первые три полосовых фильтра настроены на частоту навигационного поля, а остальные три - на ее четную субгармонику, последовательно соединенные аналогово-цифровой преобразователь и блок вычисления локальных координат, последовательно соединенные сумматор и формирователь синхроимпульсов, выход которого соединен со вторым входом блока вычисления локальных координат, при этом первый, третий и пятый выходы трехкоординатного датчика магнитного поля соединены соответственно с входами первого, второго и третьего полосовых фильтров, а второй, четвертый и шестой выходы - с входами четвертого, пятого и шестого полосовых фильтров, кроме того, выходы первого, второго и третьего полосовых фильтров соединены соответственно с первым, вторым и третьим входом аналогово-цифрового преобразователя, а выходы четвертого, пятого и шестого полосовых фильтров соединены соответственно с первым, вторым и третьим входом сумматора, отличающаяся тем, что в стационарную часть дополнительно введены последовательно соединенные устройство ввода информации, генератор частотно-модулированного сигнала и коммутатор, выход которого соединен с третьей катушкой индуктивности, а также блок управления, первый выход которого соединен с входом источника гармонического сигнала, а второй выход - с объединенными вторыми входами генератора частотно-модулированного сигнала и коммутатора, кроме того, выход делителя соединен с третьим входом коммутатора, второй выход устройства ввода информации соединен с входом блока управления, а в мобильную часть введены последовательно соединенные демодулятор частотно-модулированного сигнала и блок вычисления географических координат, выход которого является выходом системы, при этом второй выход сумматора соединен с входом демодулятора частотно-модулированного сигнала, а второй выход блока вычисления локальных координат соединен со вторым входом блока вычисления географических координат.
| УСТРОЙСТВО МАГНИТОМЕТРИЧЕСКОЙ ЛОКАЛЬНОЙ НАВИГАЦИИ | 2022 |
|
RU2789733C1 |
| СПОСОБ И СИСТЕМА МАГНИТОМЕТРИЧЕСКОЙ ЛОКАЛЬНОЙ НАВИГАЦИИ | 2022 |
|
RU2776319C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ | 2013 |
|
RU2542793C1 |
| НАВИГАЦИОННЫЙ МАГНИТОМЕТР (ВАРИАНТЫ) | 2007 |
|
RU2352954C2 |
| НАВИГАЦИОННЫЙ ТРЁХКОМПОНЕНТНЫЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2020 |
|
RU2730097C1 |
| ГОЛЕВ И.М., ЗАЕНЦЕВА Т.И., УГРЮМОВ Р.Б., ЖЕЛОНКИН М.В., ПОПОВ А.С | |||
| Магнитометрическая система локальной навигации беспилотных летательных аппаратов // Транспорт: наука, техника, управление | |||
| Научный информационный | |||

