Устройство управления светофорным объектом относится к автоматическому координированному управлению дорожным движением, управлением транспортными потоками на светофорном объекте с помощью нейронных сетей.
Известен способ управления движением транспортных средств на перекрестке. Устройство, реализующее данный способ, содержит коммутатор 1, блок управления, блок определения времени ожидания, блок (формирования сигнала переключения (фазы, вычислительный блок, элементы ИЛИ 6.1-6.N, N - число фаз управления светофорной сигнализацией, генератор, триггеры 8.1-8., элементы И, счетчики, коммутаторы 16.1-16.N, элементы И 17.1-17 Nxn, счетчики 18.1-18. N, элементы И 19.1-19N, триггеры 20.1-20.N, элементы И 21-21.N, коммутаторы 22.1-22. N, элементы И 23.1-23.Nxn, счетчики 24.1-24.N, коммутаторы 25.1-25.N, элементы ИЛИ 28.1-28.N, элемент ИЛИ [1].
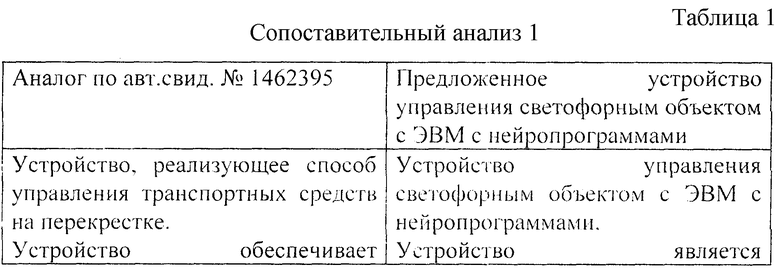
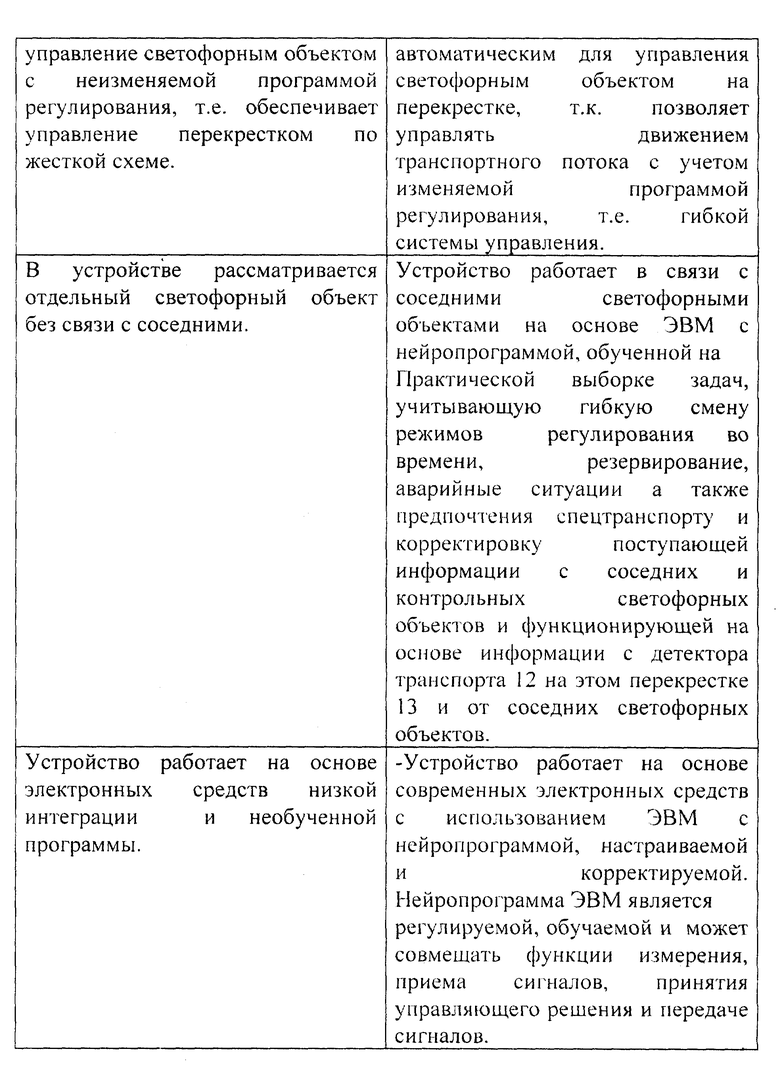
Недостатком данного устройства является неавтоматическая жесткая схема управления светофорным объектом на перекрестке, характеристика данного устройства приведена в сопоставительном анализе 1 (см. табл.1).
Наиболее близким техническим решением, выбранным за прототип, является устройство дистанционного управления светофорным объектом "Блик", состоящее из контроллера, содержащего однокристальную ЭВМ, связанного двухканальной связью с приемопередатчиком с антенной, контроллер связан платой портов с лампами светофора. На плате контроллера размещены часы реального времени, энергонезависимая память с записанной в ней конфигурацией перекрестка, однокристальный модем, обеспечивающий кодирование и декодирование радиосигналов [2].
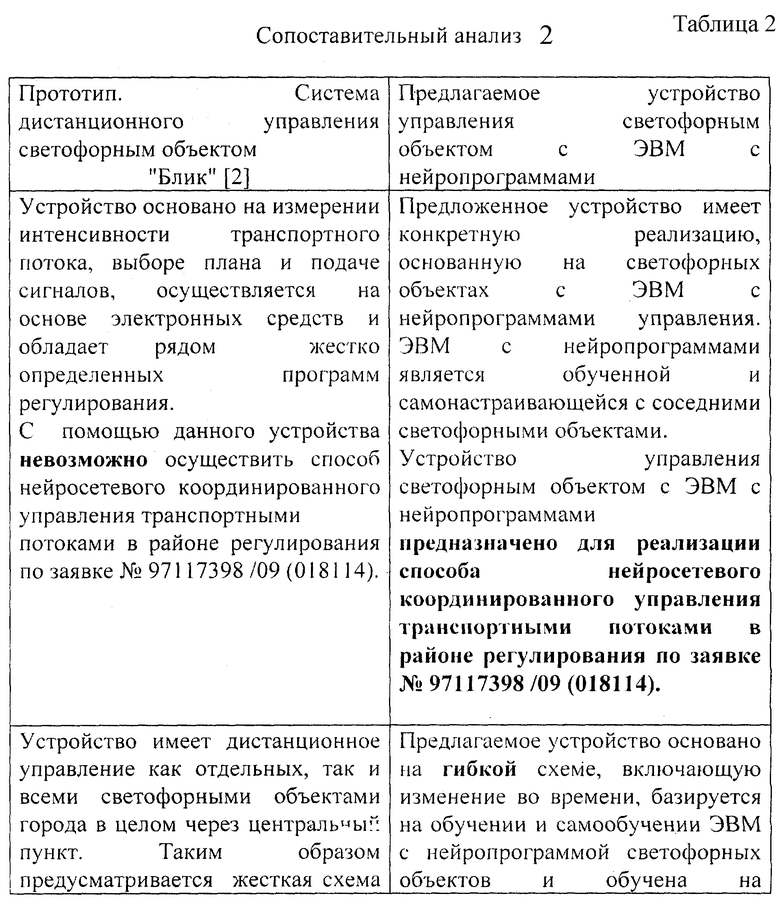
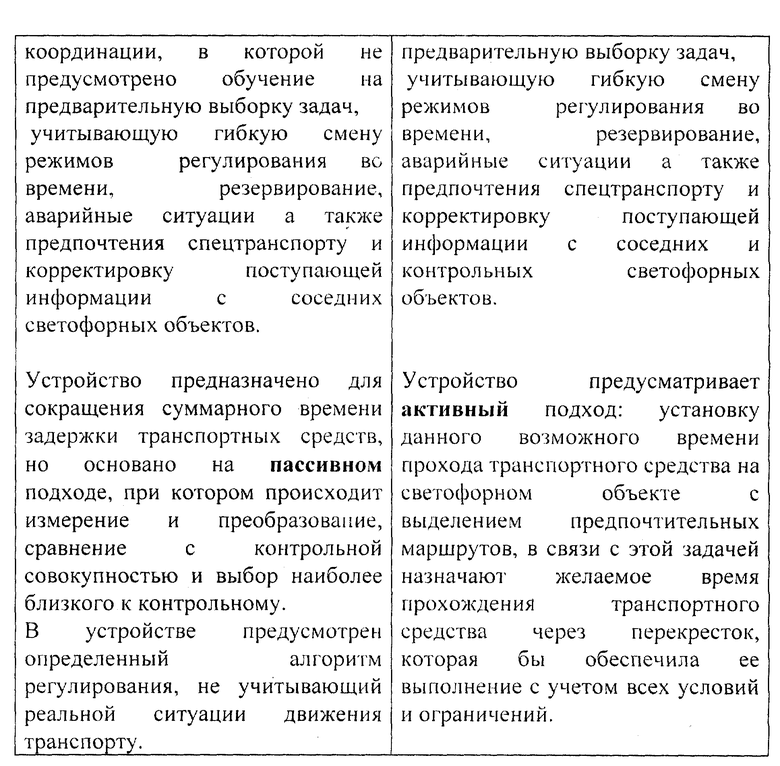
Недостатком данного устройства является его неавтоматическое, негибкое управление светофорным объектом, которое поясняется сопоставительным анализом 2.
Данное изобретение предназначено для реализации способа нейросетевого координированного управления транспортными потоками в районе регулирования по заявке N 97117398/09 (018114).
Целью изобретения является автоматическое гибкое управление светофорным объектом с помощью обучающейся нейронной сети, связанное с увеличением в установленный промежуток времени пропускной способности транспортного потока на перекрестке.
К светофорному объекту предъявляются следующие требования для реализации данного способа:
- светофорный объект должен быть снабжен ЭВМ с обучаемой нейропрограммой,
- должен иметь информационную связь с соседними и контрольными светофорными объектами,
- должен иметь информационную связь с детектором транспорта, снабженным ЭВМ с нейропрограммой, предварительно обученной на распознавание вида и количества транспорта на перекрестке, направления его движения, скорости движения, полосы движения на основе информации с датчиков транспорта.
Эти требования в предлагаемом изобретении используются, достигают поставленную цель и служат для реализации способа по заявке N 97117398.
Цель достигается тем, что в устройство управления светофорным объектом с нейропрограммами, состоящее из контроллера, содержащего ЭВМ, часы реального времени, энергонезависимую память с записанной в ней конфигурацией перекрестка, контроллер соединен двунаправленным каналом с приемопередатчиком с антенной и двунаправленным каналом с платой портов, соединенного с лампами светофорного объекта, в него введен детектор транспорта, снабженный ЭВМ с нейропрограммой, предварительно обученной на распознавание на перекрестке вида и количества транспорта, направления его движения, скорости движения, полосы движения на основе информации с датчиков транспорта, а также тем, что контроллер с ЭВМ снабжен нейропрограммой, предварительно обученной на практическую выборку задач, учитывающую гибкую смену режимов регулирования во времени, резервирование, аварийные ситуации, а также на предпочтения спецтранспорту и корректировку поступающей информации с соседних светофорных объектов, функционирующей на основе информации с детектора транспорта на этом перекрестке и от соседних светофорных объектов и корректирующих коэффициентов предпочтения с контрольных светофорных объектов на "входах-выходах" района регулирования, при этом контроллер с ЭВМ с нейропрограммой связан приемопередающей информационной сетью с соседними и контрольными светофорными объектами через приемопередатчик и антенну.
Благодаря тому, что в устройство управления светофорным объектом с нейропрограммами введен детектор транспорта, снабженный ЭВМ с нейропрограммой, предварительно обученной на распознавание вида и количества транспорта на перекрестке, направления его движения, скорости движения, полосы движения на основе информации с датчиков транспорта, а контроллер с ЭВМ снабжен нейропрограммой, предварительно обученной на практическую выборку задач, учитывающую гибкую смену режимов регулирования во времени, резервирование, аварийные ситуации, а также предпочтения спецтранспорту и корректировку поступающей информации с соседних светофорных объектов и функционирующей на основе информации с детектора транспорта на этом перекрестке и от соседних светофорных объектов на основе корректирующих коэффициентов предпочтения с контрольных светофорных объектов на "входах-выходах" района регулирования, при этом контроллер с ЭВМ с нейропрограммой связан приемопередающей информационной сетью с соседними и контрольными светофорными объектами через приемопередатчик и антенну, достигается цель изобретения - эффективное автоматическое гибкое управление светофорным объектом с помощью обучающейся ЭВМ с нейропрограммой контроллера, связанное с увеличением в установленный промежуток времени пропускной способности транспортного потока на перекрестке с уменьшением времени задержек транспортного потока, предотвращения заторов.
Контроллер с ЭВМ имеет обучающуюся нейропрограмму. Для обучения используется алгоритм двойственного функционирования, представляющего собой процедуру многомерной оптимизации подстраиваемых параметров с минимизацией ошибки функционирования, в котором используется метод множителей Лагранжа [3, 4, 5] . Контроллер с ЭВМ с обучаемой нейропрограммой уже использован и опробован в действии для управления несущей способностью многопролетной неразрезной балки и показал хорошие результаты, а также описан в пособии "Автоматическое управление конструкциями с помощью нейронных сетей" [6, 7].
Приемопередающая информационная сеть светофорного объекта с соседними светофорными объектами позволяет производить регулировку транспортного потока по перекрестку и району регулирования.
Предложенное устройство управления светофорным объектом с ЭВМ с нейропрограммами имеет конкретную реализацию, основанную на светофорных объектах с нейропрограммами, обученными на предварительную выборку задач, работает по гибкой схеме, имеет возможность доучивания.
Использование устройства управления светофорным объектом с ЭВМ с нейропрограммами позволяет эффективно автоматически управлять транспортными потоками за счет обучающейся нейропрограммы, учитывающей все ситуации в регулируемом районе, обучении на основе практической выборки задач всех светофорных объектов, связанных приемопередающей информационной сетью, подаче сигналов на контрольные светофорные объекты, сравнении полученных параметров, корректировке и осуществлении обратной связи, и осуществление настройки системы управления.
Устройство управления светофорным объектом с ЭВМ с нейропрограммами представлено на фигурах:
на фиг. 1 представлена общая схема устройства управления светофорным объектом с ЭВМ с нейропрограммами,
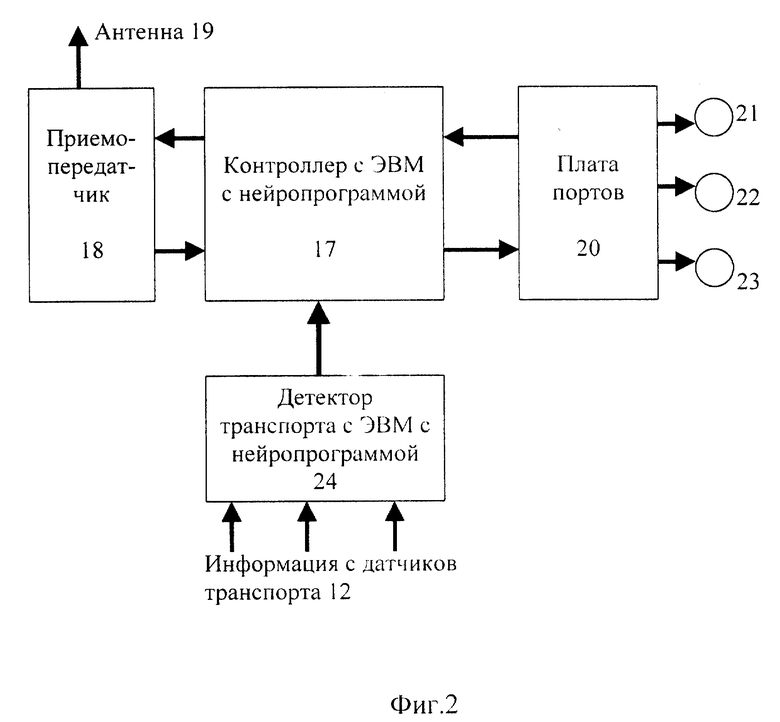
на фиг. 2 - общая схема устройства управления светофорным объектом,
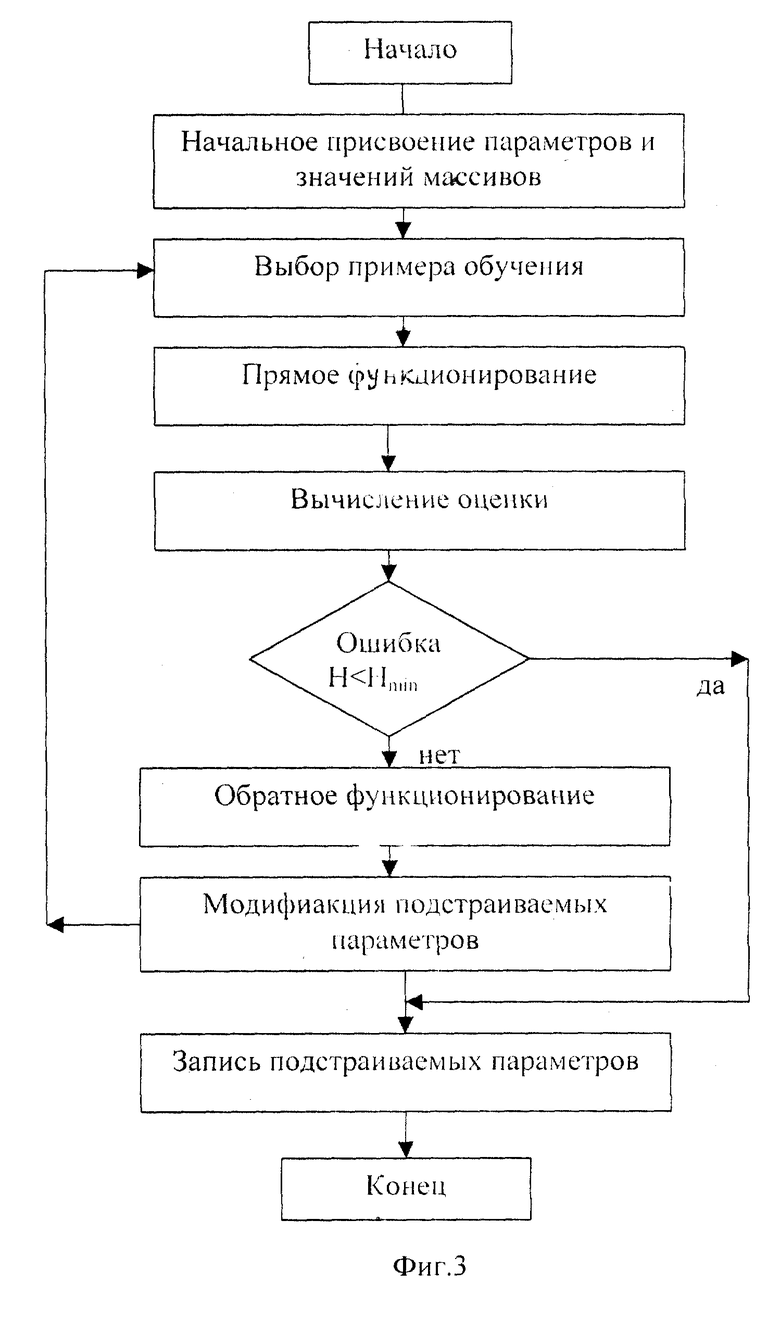
на фиг. 3 - схема обучения нейропрограммы ЭВМ контроллера, на входе интенсивность движения, на выходе - время горения зеленого сигнала,
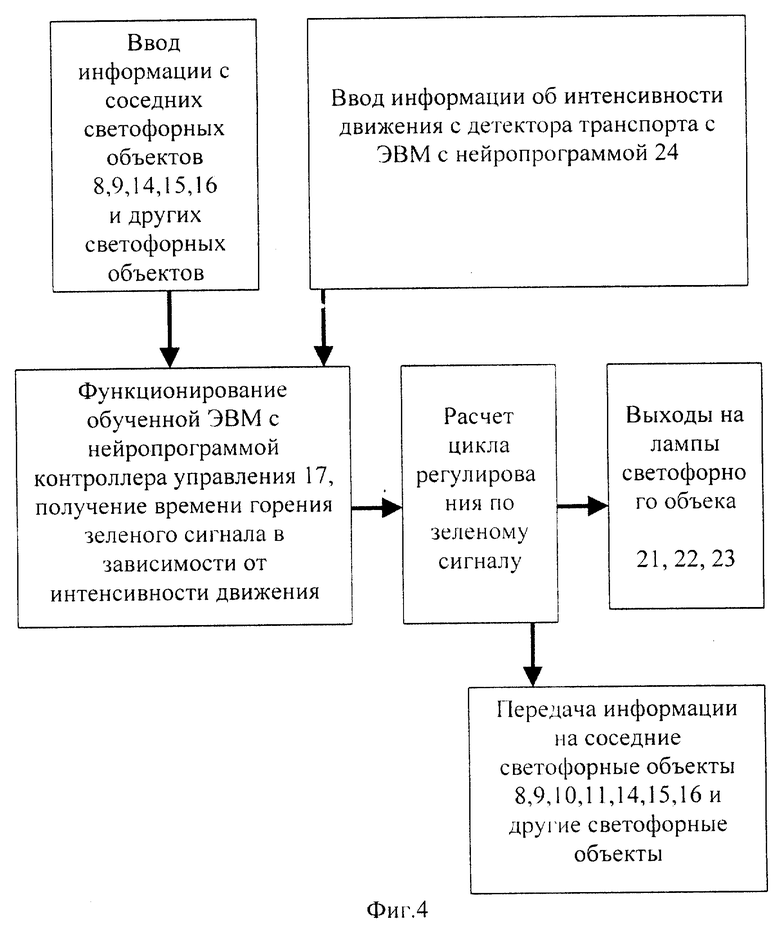
на фиг. 4 - схема функционирования нейропрограммы контроллера с ЭВМ,
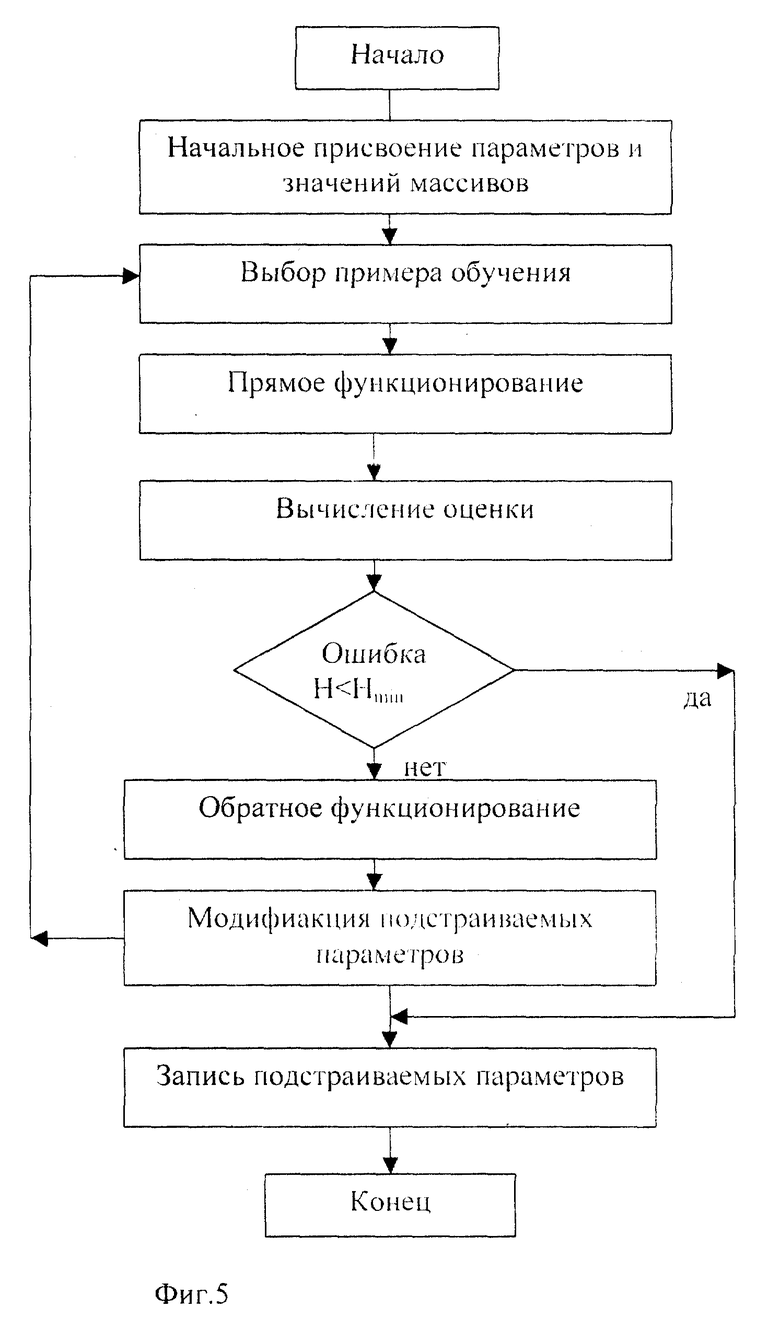
на фиг. 5 - схема обучения нейропрограммы детектора на распознавание вида и количества транспорта. Аналогична также схема обучения нейропрограммы ЭВМ контроллера (см. фиг. 3), на входе - показания датчиков транспорта, на выходе - интенсивность движения,
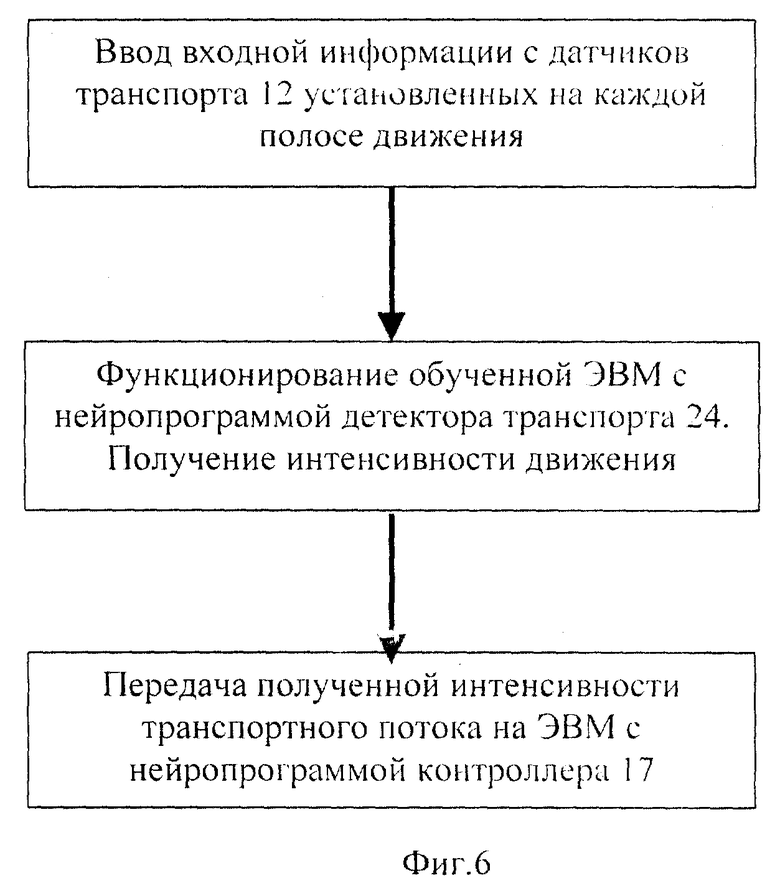
на фиг. 6 - схема функционирования ЭВМ нейропрограммы детектора.
Ниже используются понятия и определения как в заявке N 97117398.
Под районом регулирования понимается некоторый район города, имеющий определенные магистральные направления. Под "входом-выходом" района регулирования понимается измерение интенсивности транспортного потока в районе регулирования.
Под внутренними светофорными объектами понимается набор устройств, обеспечивающих регулирование дорожного движения на перекрестке. В устройство входят: непосредственно светофор, контроллер с ЭВМ с нейропрограммой, приемопередатчик, плата портов с лампами светофорного объекта, детектор транспорта с ЭВМ с нейропрограммой.
Контрольные светофорные объекты, такие же по составу, как и внутренние светофорные объекты, с отличием в том, что их нейропрограмма дополнительно сверяет затраченное время с контрольными критериями времени пропуска транспорта и выдает управляемые сигналы на внутренние светофорные объекты с указанием корректирующих коэффициентов предпочтения.
Выборка задач учитывает гибкую смену режимов регулирования во времени, резервирование, аварийные ситуации, а также предпочтения спецтранспорту и корректировку поступающей информации с соседних светофорных объектов.
Устройство управления светофорным объектом с ЭВМ с нейропрограммами на светофорном объекте в районе регулирования 1 (фиг. 1) имеет реальную сеть улиц 2, 3, 4, 5, 6, 7 с перекрестками. Улица 6 является главной магистралью. На "входах-выходах" района регулирования расположены 8, 9, 10, 11 - контрольные светофорные объекты с датчиками транспорта 12, установленные на каждой полосе движения района регулирования для измерения транспортных потоков на "входах-выходах" района регулирования и внутренние светофорные объекты 13, 14, 15, 16 со своими датчиками транспорта 12.
Устройство управления светофорным объектом с ЭВМ с нейропрограммами содержит контроллер 17 с ЭВМ, снабженный нейропрограммой, предварительно обученной на практическую выборку задач, учитывающую гибкую смену режимов регулирования во времени, резервирование, аварийные ситуации, а также предпочтения спецтранспорту и корректировку поступающей информации с соседних светофорных объектов и функционирующей на основе информации с детектора транспорта 12 на этом перекрестке 13 и от соседних светофорных объектов 8, 9, 14, 15, 16 и через них с другими светофорными объектами на основе корректирующих коэффициентов предпочтения с контрольных светофорных объектов 8, 9, 10, 11 на "входах-выходах" района регулирования 1, при этом контроллер с ЭВМ с нейропрограммой связан приемопередающей информационной сетью с соседними светофорными объектами 8, 9, 14, 15, 16 и через них с другими светофорными объектами через приемопередатчик 18 и антенну 19 (фиг. 2).
В устройство управления светофорным объектом с ЭВМ с нейропрограммами введен детектор транспорта 24 с ЭВМ, снабженный нейропрограммой, предварительно обученной на распознавание вида и количества транспорта на перекрестке, направления его движения, скорости движения, полосы движения на основе информации с датчиков 12 транспорта, установленных на каждой полосе движения на перекрестке, соединенный выходом с входом контроллера 7 с ЭВМ с нейропрограммой.
Нейропрограмма ЭВМ контроллера обучена на основе натурных обследований и корректирующих коэффициентов с контрольных светофорных объектов и которая может доучиваться в процессе эксплуатации. На основе нейропрограммы в результате обучения каждого светофорного объекта (внутреннего и контрольного) производится настройка на оптимальную работу на основе корректирующих коэффициентов предпочтения. В процессе эксплуатации каждый светофорный объект получает дополнительную информацию и совершает свою управляющую работу путем доучивания, что предусмотрено алгоритмом нейропрограммы, т.е. светофорные объекты работают с прямой и обратной связью, взаимодействуют между собой.
Устройство работает следующим образом.
Устройство управления светофорным объектом с ЭВМ с нейропрограммами работает, например, на светофорном объекте 13, следующим образом:
В контроллер с ЭВМ с нейропрограммой 17, предварительно обученной на практическую выборку задач, учитывающую гибкую смену режимов во времени, резервирование, аварийные ситуации, а также предпочтения спецтранспорту и корректировку поступающей информации с соседних и контрольных светофорных объектов, поступает информация через антенну 19 приемопередатчика 18 от всех светофорных объектов, а также сюда поступает информация с детектора транспорта 24 с ЭВМ с нейропрограммой, предварительно обученной на распознавание вида и количества транспорта на перекрестке, направления его движения, скорости движения, полосы движения на основе информации с датчиков транспорта 12.
Контроллер с ЭВМ с нейропрограммой 17 может получать информацию и от других структур системы управления транспортными потоками.
Контроллер 17 с ЭВМ с нейропрограммой осуществляет управление транспортными потоками через плату портов 20, дающей сигналы включения-выключения определенных групп ламп 21, 22, 23 светофорного объекта 13 с учетом информации на соседних светофорных объектах 8, 9, 14, 15, 16 и через них с другими светофорными объектами с учетом информации на основе корректирующих коэффициентов предпочтения от контрольных светофорных объектов 8, 9, 10, 11.
Контроллер 17 с ЭВМ с нейропрограммой имеет предварительно обученную нейропрограмму на основе натурных обследований на основе корректирующих коэффициентов предпочтения и которая самообучается в процессе эксплуатации. На основе нейропрограммы в результате обучения каждого светофорного объекта (внутреннего и контрольного) производится настройка на оптимальную работу, как и обучение, с указанными ему коэффициентами предпочтения. В процессе эксплуатации каждый светофорный объект получает дополнительную информацию и совершает свою управляющую работу путем доучивания, что предусмотрено алгоритмом нейропрограммы, т.е. светофорные объекты работают с прямой и обратной связью, взаимодействуют между собой.
Схема обучения нейропрограммы ЭВМ контроллера 17 представлена на фиг. 3 и осуществляется по известной методике [3, 7].
Схема функционирования нейропрограммы ЭВМ контроллера 17 представлена на фиг. 4 и осуществляется следующим образом:
Ввод информации с соседних светофорных объектов 8, 9, 14, 15, 16 и через них с другими светофорными объектами и информация об интенсивности движения транспортного потока с детектора транспорта с ЭВМ с нейропрограммой 24 поступает на функционирование обученной ЭВМ с нейропрограммой контроллера управления 17, получение времени горения зеленого сигнала в зависимости от интенсивности движения с дальнейшим расчетом цикла регулирования по зеленому сигналу с выходом на лампы светофорного объекта 21, 22, 23. Расчет цикла регулирования по зеленому сигналу передается на соседние светофорные объекты 8, 9, 14, 15, 16 и через них на другие светофорные объекты. Если время прохождения транспортного потока больше, чем установленное, то с контрольных светофорных объектов 8, 9, 10, 11 поступают корректирующие управляющие сигналы.
Схема обучения нейропрограммы ЭВМ детектора транспорта 24 представлена на фиг. 5.
Схема функционирования нейропрограммы ЭВМ детектора транспорта 24 представлена на фиг. 6 и включает в себя:
ввод входной информации с датчиков транспорта 12, установленных на каждой полосе движения,
функционирование обученной ЭВМ с нейропрограммой детектора транспорта 24, получение интенсивности движения,
передача полученной интенсивности транспортного потока на ЭВМ с нейропрограммой контроллера 17.
Пример выполнения. Приближающийся по магистрали транспортный поток к светофорному объекту с ЭВМ с нейропрограммой 13 фиксируется датчиками транспорта 12 и информация поступает в детектор транспорта 24 с ЭВМ с нейропрограммой, предварительно обученной на распознавание вида и количества транспорта на перекрестке, направления его движения, скорости движения, полосы движения, и информация о параметрах транспортных потоков по направлениям поступает в контроллер 17 с ЭВМ с нейропрограммой, в котором с учетом информации с соседних светофорных объектов 8, 9, 14, 15, 16 и через них с другими светофорными объектами, где вырабатывается управляющий сигнал на лампы 21, 22, 23 светофорного объекта 13 с ЭВМ с нейропрограммами, например, зеленого цвета.
Если время пропуска поперечного транспорта не удовлетворяет контрольному предпочтению, то срок горения (например, зеленого сигнала) по главной магистрали увеличивается.
Обучение нейропрограммы микроЭВМ 17 контроллера происходит следующим образом (см. фиг. 3):
- Ввод входной информации с датчиков 12 транспорта, установленных на каждой полосе движения.
- Функционирование контроллера заранее обученной ЭВМ с нейропрограммой детектора транспорта 24. Получение интенсивности движения.
- Передача полученной интенсивности на ЭВМ с нейропрограммой контроллера 17.
Светофорный объект с контроллером с микроЭВМ с нейропрограммой представляет собой локальную подсистему, которая по собственной нейропрограмме принимает оптимальное решение о пропускной способности на основе информации: от соседних светофорных объектов - пропуск машин, прошедших в его направлении с учетом времени проезда от соседнего до данного светофорного объекта.
Собственная нейропрограмма обучена на выборке задач, учитывающей гибкую смену режимов регулирования во времени, резервирование, аварийные ситуации и др. , включающей время пропуска транспортного потока через перекресток от максимального до минимального, особенно выделяя направления и потоки транспорта общего пользования, спецтранспорта с указанием соответствующих им предпочтений с учетом всех местных условий и ограничений работать по поступающей информации по критерию минимума задержек (по максимальной пропускной способности) и корректирующих управляющих сигналов с контрольных светофорных объектов 8, 9, 10, 11.
Детектор транспорта 24 с ЭВМ с нейропрограммой может быть выполнен на звуковой, видео и магнитной основе.
Контроллер 17 с ЭВМ с нейропрограммой был использован для управления несущей способности многопролетной неразрезной балки и показал хорошие результаты [6].
Литература
1. А. с. N 1462395 Способ управления движением транспортных средств на перекрестке. Опубл. БИ N 8, 1989 г.
2. Система дистанционного управления светофорными объектами и ее составных частей. Техническое задание. Изделие разработано и производится фирмой "Нивелир", адрес 690105, Владивосток, ул. Бородинская 46/50, а/я 105-59 (прототип).
3. Барцев С.И., Гилев С.Е., Охонин В.А. Принцип двойственности в организации адаптивных сетей обработки информации /Сборник "Динамика химических и биологических систем"// Новосибирск, Наука, 1989 г.
4. Введение в искусственные нейронные сети. Анил К. Джейн / Журнал "Открытые системы. Нейрокомпьютеры". N 4 (24), 1997, с. 16.
5. Кременец Ю.А. Технические средства организации дорожного движения. М. Транспорт, 1990 г.).
6. Способ автоматического управления несущей способности многопролетной неразрезной балки с помощью контроллера с нейросетевой программой и устройство для его осуществления. Заявка на изобретение N 97107519, по которой получено решение о выдаче патента РФ от 29 апреля 1998 г.).
7. Автоматическое управление конструкциями с помощью нейронных сетей. Абовский Н.П., Абросимов П.С., Бабанин В.Б., Ланкин Ю.П., Смолянинова Л.Г., КрасГАСА, Красноярск, 1996 г., с. 88.
8. Способ нейросетевого координированного управления транспортными потоками в районе регулирования. Заявка на изобретение N 97117398. Бабанин В.Б., Смолянинова Л.Г., Абовский Н.П. и др.
Устройство управления светофорным объектом с ЭВМ с нейропрограммами относится к автоматическому координированному управлению дорожным движением, транспортными потоками на светофорном объекте с помощью нейронных сетей. Технический результат заключается в автоматическом гибком управлении светофорным объектом с помощью обучающейся нейронной сети, связанном с увеличением в установленный промежуток времени пропускной способности транспортного потока на перекрестке. Устройство управления светофорным объектом с нейропрограммами состоит из контроллера, содержащего ЭВМ, часы реального времени, энергонезависимую память с записанной в ней конфигурацией перекрестка, детектор транспорта, снабженный ЭВМ с нейропрограммой, предварительно обученной на распознавание на перекрестке вида и количества транспорта, направления его движения, скорости движения, полосы движения на основе информации с датчиков транспорта, контроллер с ЭВМ снабжен нейропрограммой, предварительно обученной на практическую выборку задач, учитывающую гибкую смену режимов регулирования во времени, резервирование, аварийные ситуации, а также на предпочтения спецтранспорту и корректировку поступающей информации с соседних светофорных объектов, функционирующей на основе информации с детектора транспорта на этом перекрестке и от соседних светофорных объектов и корректирующих коэффициентов предпочтения с контрольных светофорных объектов на входах-выходах района регулирования, при этом контроллер с ЭВМ с нейропрограммой связан приемопередающей информационной сетью с соседними и контрольными светофорными объектами через приемопередатчик и антенну. 6 ил., 2 табл.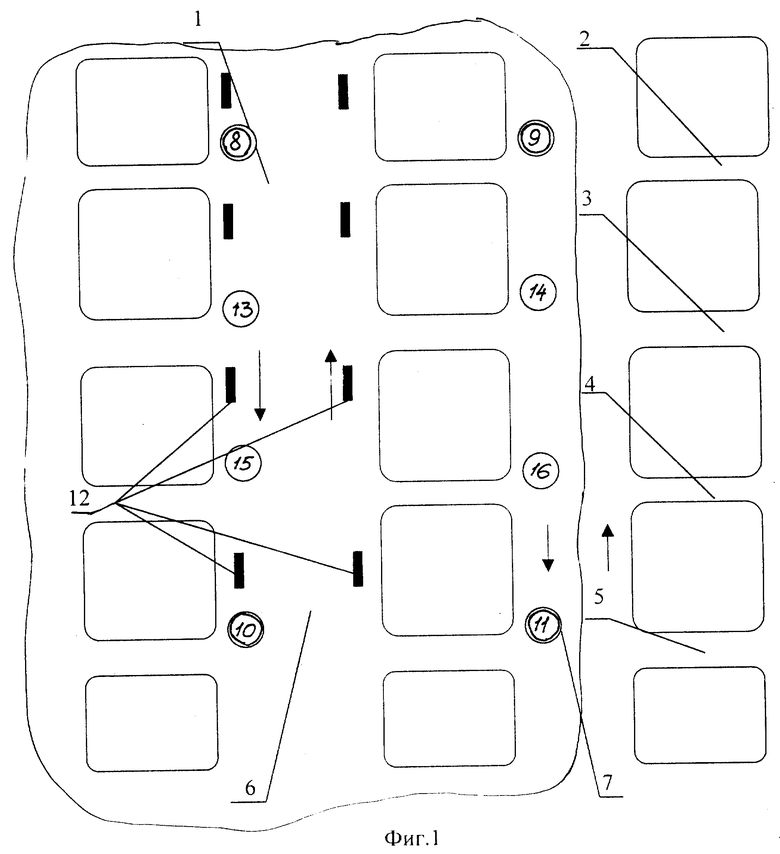
Устройство управления светофорным объектом с ЭВМ с нейропрограммами, состоящее из контроллера, содержащего ЭВМ, часы реального времени, энергонезависимую память с записанной в ней конфигурацией перекрестка, соединенного двунаправленным каналом с платой портов, соединенной с лампами светофорного объекта, при этом контроллер связан приемопередающей информационной сетью с соседними и контрольными светофорными объектами через приемопередатчик и антенну, отличающееся тем, что в устройство введен детектор транспорта, снабженный ЭВМ с нейропрограммой, предварительно обученной на распознавание на перекрестке вида и количества транспорта, направления его движения, скорости движения, полосы движения на основе информации с датчиков транспорта, а также тем, что контроллер с ЭВМ снабжен нейропрограммой, предварительно обученной на практической выборке задач, учитывающей гибкую смену режимов регулирования во времени, резервирование, аварийные ситуации, а также предпочтения спецтранспорту и корректировку поступающей информации с соседних светофорных объектов и функционирующей на основе информации с детектора транспорта на этом перекрестке и от соседних светофорных объектов и на основе корректирующих коэффициентов предпочтения с контрольных светофорных объектов на входах-выходах района регулирования.
| Устройство дистанционного управления светофорным объектом "БЛИК" | |||
| Техническое описание | |||
| г.Владивосток, 1997 | |||
| Способ управления движением транспортных средств на перекрестке | 1987 |
|
SU1462395A1 |
| Осветительное устройство | 1987 |
|
SU1538288A1 |
| US 5309155 A, 03.05.1994 | |||
| US 3737847 A, 05.06.1973. | |||
