Изобретение относится к координированному управлению дорожным движением, способам управления транспортными потоками в районах регулирования с использованием нейронных сетей.
Известен способ управления движением транспортных потоков на перекрестке, при котором измеряют интенсивность движения транспортных потоков на каждом направлении перекрестка путем подсчета за период опроса количества транспортных средств на каждом направлении перекрестка и последовательного переключения светофорных сигналов, при котором определяют среднюю интенсивность транспортных потоков на перекрестке для каждой из возможных для данного перекрестка фаз регулирования путем подсчета за период опроса, величина которого в 10-30 раз больше величины цикла управления светофорной сигнализацией, числа транспортных средств на всех направления движения каждой фазы и деления его на число направлений движения, участвующих в данной фазе. Для каждого направления движения перекрестка определяют абсолютное значение величины отклонения интенсивности транспортных потоков на нем от величины средней интенсивности транспортных потоков фазы регулирования, в которой участвует данное направление, суммируют абсолютные отклонения интенсивностей движения для фаз, входящих в каждую из возможных программ регулирования, сравнивают полученные суммы и выбирают на следующий период опроса программу управления с наименьшей суммой отклонений интенсивностей движения транспортных средств по направлениям, входящим в данную программу управления, от величин средних интенсивностей потоков соответствующих фаз регулирования (а. с. СССР N 1399800, МКИ G 08 G 1/01).
Сопоставительный анализ
А.с. N 139980. Предложен способ управления движением транспортных потоков на перекрестке. Предложен децентрализованный способ управления с адаптивным выбором программы регулирования. В качестве отсчета выбирают средние параметры (интенсивности) и делают попытки ее улучшить. Способ не учитывает предпочтение для маршрутов районного масштаба. Способ осуществляется на основе менее эффективных электронных средств с традиционными программами.
Предлагаемое изобретение. Предложен способ нейросетевого координированного управления транспортными потоками в районе регулирования. Способ управления районом осуществляется на основе практической выборки задач. Предлагаемый способ позволяет управлять движением с учетом гибкой смены режимов по времени, резервирования, аварийных ситуаций и др. Способ разработан с учетом предпочтений для района регулирования в случае, если перекресток относится к основным направлениям движения в районе регулирования. Способ осуществляется на основе современных электронных средств с использованием микроЭВМ с нейропрограммой, настраиваемой и корректируемой, система обучаемая и самообучаемая при эксплуатации может совмещать функции измерения, приема сигналов, принятия обученного решения и передачи сигналов.
Известен способ управления движением транспортных средств на перекрестке, основанный на регистрации моментов времени поступления транспортных средств на направления перекрестка, измерении в течение интервала времени от минимального до максимального времени действия включенной фазы светофорного регулирования для включенного направления движения интервалов времени между каждыми двумя последовательными моментами поступления транспортных средств на это направление, сравнении величины измеренных интервалов времени с заданным интервалом времени и включении фазы светофорного регулирования, если очередной измеренный интервал времени превышает заданный интервал, при котором для каждой из выключенных фаз светофорного регулирования через равные интервалы времени, в десять или более раз меньшие минимальной длительности фазы, измеряют общее время ожидания разрешающего сигнала транспортными средствами, поступившими на направления фазы светофорного регулирования, сравнивают их между собой, включают фазу светофорного регулирования с наибольшим на момент сравнения общим временем ожидания транспортных средств (см. а.с. N 1462395, МКМ G 08 G 1/01).
Сопоставительный анализ
А.с. 1462395. Способ управления движением транспортных средств на перекрестке. Предназначен для сокращения суммарного времени задержки транспортных средств на перекрестке, т.е. рассматривается отдельно взятый светофор, который принимает решения без связи с другими светофорами. Способ управления регламентируется по жесткой логике управления, хотя предусматривает некоторый поиск для уменьшения времени прхождения транспорта. Складывающаяся ситуация (опыт) нигде не запоминается и не изучается на будущее. Способ осуществляется на основе менее эффективных электронных средств с традиционными программами.
Предложенное изобретение. Предложен способ нейросетевого координированного управления транспортными потоками в районе регулирования. Предназначен для управления управляемого района, все светофоры взаимосвязаны и служат для управления районом регулирования. Способ управления районом осуществляется на основе практической выборки задач. Предлагаемый способ позволяет управлять движением с учетом гибкой смены режимов по времени, резервирования, аварийных ситуаций и др. Способ разработан с учетом предпочтений для маршрутов района регулирования в случае, если перекресток относится к основным направлениям движения района регулирования. Способ осуществляется на основе современных электронных средств с использованием микроЭВМ с нейропрограммой, настраиваемой и корректируемой, система обучаемая и самообучаемая при эксплуатации может совмещать функции измерения, приема сигналов, принятия обученного решения и передачи сигналов.
Известен способ координированного управления транспортными потоками, взятый за прототип, основанный на измерении интенсивности транспортного потока на входах перекрестков улиц района управления, выборе в результате измерения плана координации и подаче сигналов на светофорную сигнализацию в соответствии с выбранным планом, при котором измеряют на выходах перекрестков района управления, совместно с интенсивностью транспортных потоков на входах перекрестка преобразуют в интенсивность транспортного потока на каждом направлении движения данного перекрестка района управления, в соответствии с наибольшей интенсивностью движения на одном из направлений последовательно выбирают и опрашивают следующий перекресток с максимальной интенсивностью движения, по полученной информации определяют совокупность направлений с максимальной интенсивностью движения, сравнивают ее с контрольными совокупностями, выбирают наиболее близкую по направлениям движения контрольную совокупность и выбирают план координации, заранее рассчитанный для выбранной контрольной совокупности (см. а.с. СССР N 510957, G 08 G 1/095).
Сопоставительный анализ
А. с. N 510957. Предложен способ управления транспортными потоками. Предусматривается жесткая схема координации, изменение во времени не оговорено и не предусмотрены случаи сбоя отдельных светофоров, аварийные ситуации, запасные маршрутные потоки и др. Автоматическое управление не предусмотрено. Предлагаемое координированное управление транспортными средствами основано на пассивном подходе, т.к. измеряют и преобразуют то,что есть, сравнивают с контрольными совокупностями и выбирают наиболее близкую.Способ основан на измерении интенсивности транспортного потока, выборе плана и подаче сигналов в соответствии с этим, осуществляется на основе несовершенных электронных средств. Система не автоматическая.
Предложенный способ. Предложен способ нейросетевого координированного управления транспортными потоками в районе регулирования. Предлагаемый способ основан на гибкой схеме, включающей изменение во времени. Способ базируется на обучении, самообучении всей сети светофорных объектом. Нейропрограммное управление светофорными объектами предусматривает различные варианты управления, включая случаи сбоя, выбор необходимого направления движения, запоминание и учет аварийных ситуаций и др. т.е. обеспечивает автоматическое управление транспортными потоками. Способ предусматривает активный подход: устанавливают данное, возможное время прохода транспортных средств на "выходах-входах" района с выделением предпочтительных маршрутов транспортных средств и др. и в соответствии с этой задачей назначают желаемое время прохождения транспортных средств через сеть светофорных объектов, которая обеспечила бы ее выполнение с учетом всех местных условий и ограничений. Предложенный способ имеет конкретную реализацию, основанную на светофорных объектах с нейропрограммами управления и приборах опознавания-принятия управленческих решений, способ работает по гибкой системе, обученной и самонастраивающейся, все светофорные объекты связаны между собой. Способ осуществляется автоматически.
Предложенный способ нейросетевого координированного управления транспортными потоками в районе регулирования предназначен для управления транспортными потоками в целом районе, обучает систему на основе практической выборки задач, учитывающих гибкую смену режимов регулирования во времени, резервирование, аварийные ситуации и др., настраивают систему и корректируют, т.е. осуществляют обратную связь и самонастройку системы. Представленная система является обучаемой и самообучаемой при эксплуатации, использует современные электронные устройства, которые совмещают функции измерения, приема сигналов, принятия обученного решения, передачи информации и приведения в действие исполнительных устройств.
Целью изобретения по способу нейросетевого координированного управления транспортными потоками в районе регулирования является эффективное автоматическое управление транспортными потоками с помощью обучающейся и самообучающейся нейронной сети, связанное с увеличением в установленный промежуток времени пропускной способности транспортных средств в управляемом районе регулирования, уменьшением задержек движения, предотвращением заторов, выделением предпочтительных направлений движения.
Цель достигается тем, что по способу нейросетевого координированного управления транспортными потоками в районе регулирования, основанному на измерении интенсивности транспортных потоков на входах перекрестков улиц района регулирования, выборе в результате измерений плана координации, наиболее близкого к контрольной совокупности, и подаче управляющих сигналов на светофорную сигнализацию, предварительно назначают желаемые показатели по коэффициентам предпочтения от "входа" до "выхода" управляемого района на контрольных светофорных объектах, после чего выбирают схему размещения внутренних светофорных объектов внутри района регулирования, позволяющую обеспечить стратегию с учетом условий и ограничений, снабжают все светофорные объекты микроЭВМ с нейропрограммой средствами взаимного обмена информацией о "входах-выходах" транспортных средств, обучают на основе практической выборки задач все связанные информационной сетью светофорные объекты, снабженные микроЭВМ с нейропрограммой, учитывающей гибкую смену режимов во времени, резервирование, возможные сбои и аварийные ситуации, различные предпочтения спецтранспорту, сравнивают полученные параметры потоков с назначенными на границах района и при наличии отклонений корректируют, т.е. осуществляют обратную связь путем подачи сигналов об изменении коэффициентов предпочтения с контрольных светофорных объектов, снабженных микроЭВМ с нейропрограммами, на внутренние светофорные объекты, в итоге осуществляют самонастройку системы управления транспортными потоками.
Предлагаемый способ нейросетевого координированного управления транспортными потоками в районе регулирования благодаря назначению желаемых показателей управления транспортными потоками, выбору схемы размещения светофорных объектов, снабженных микроЭВМ с обученной нейропрограммой и средствами обмена информацией, учитывающей все ситуации в районе регулирования, сравнению полученных параметров потока с назначенными показателями и корректированию их позволяет эффективно производить процесс автоматического регулирования, а благодаря возможности обучения, доучивания и самообучения светофорных устройств, снабженных микроЭВМ с нейропрограммным управлением, с желаемыми показателями управляемого района позволяет более эффективно автоматически осуществлять способ управления транспортными потоками в районе регулирования, использует современные нейропрограммы. Предлагаемый способ вместе с нейропрограммой управления может быть локальным и координированным по направлениям движения с выделением приоритетов и специальных назначений.
Ниже приняты следующие термины и понятия.
Район регулирования - это некоторый район города, имеющий определенные магистральные направления.
Под внутренними светофорными объектами понимается набор устройств, обеспечивающих регулирование дорожного движения на перекрестке. В устройство входят непосредственно светофор, датчики интенсивности движения, цифровой нейроконтроллер с аналого-цифровым преобразователем и микроЭВМ с нейропрограммой. Цифровой нейроконтроллер принимает входную информацию с соседних светофорных объектов и выдает информацию на соседние светофорные объекты. МикроЭВМ с нейропрограммой обучена на основе натурных обследований и самообучается в процессе эксплуатации.
Контрольные светофорные объекты такие же по составу, как и внутренние светофорные объекты по составу с отличием в том, что их нейропрограмма дополнительно сверяет затраченное время с установленными контрольными критериями времени пропуска транспорта и выдает управляемые сигналы на внутренние светофорные объекты с указанием коэффициентов предпочтения. Коэффициент предпочтения вычисляется (см. ниже формулу 4).
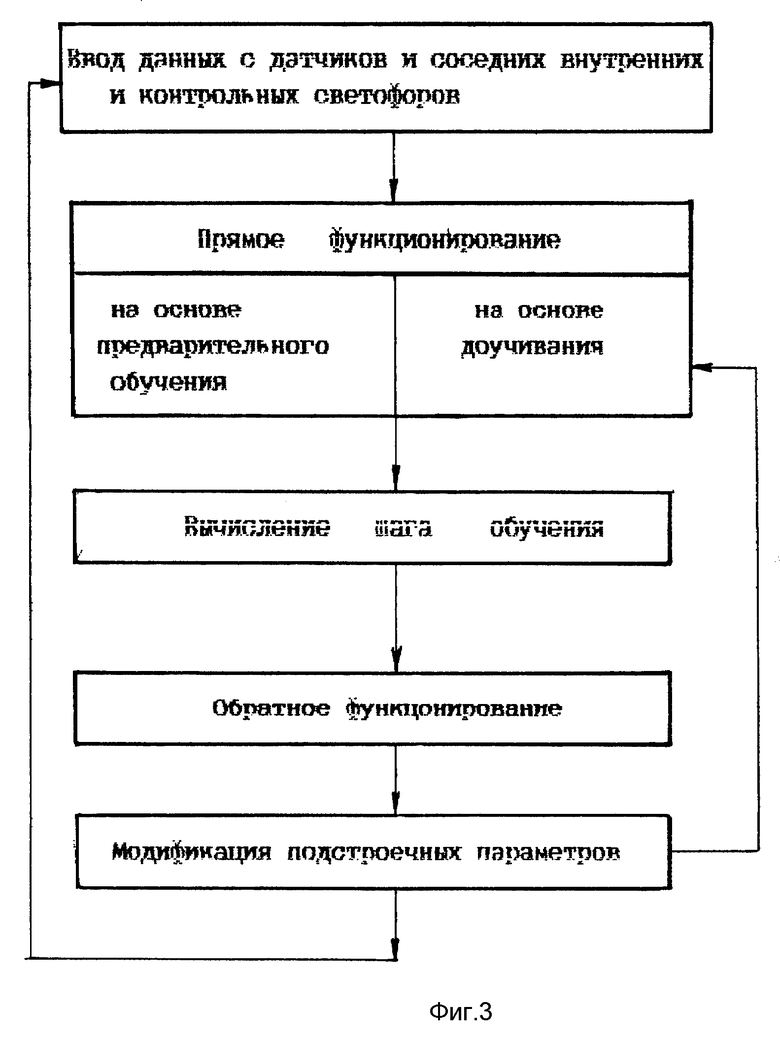
Под нейтропрограммой понимается программа, обученная на основе натурных обследований с учетом заданного набора коэффициентов предпочтения и которая самообучается в процессе эксплуатации. На основе нейропрограммы в результате обучения каждого светофорного объекта (внутреннего и контрольного) производится настройка на оптимальную работу, как обучение с указанными ему коэффициентами предпочтения. В процессе эксплуатации каждый светофорный объект получает дополнительную информацию и совершает свою управляющую работу путем доучивания, что предусмотрено алгоритмом нейропрограммы (см. фиг. 3), т.е. светофорные объекты работают с прямой и обратной связью, взаимодействуют между собой.
На фиг. 1 предложена схема нейросетевого координированного управления транспортными потоками в районе регулирования,
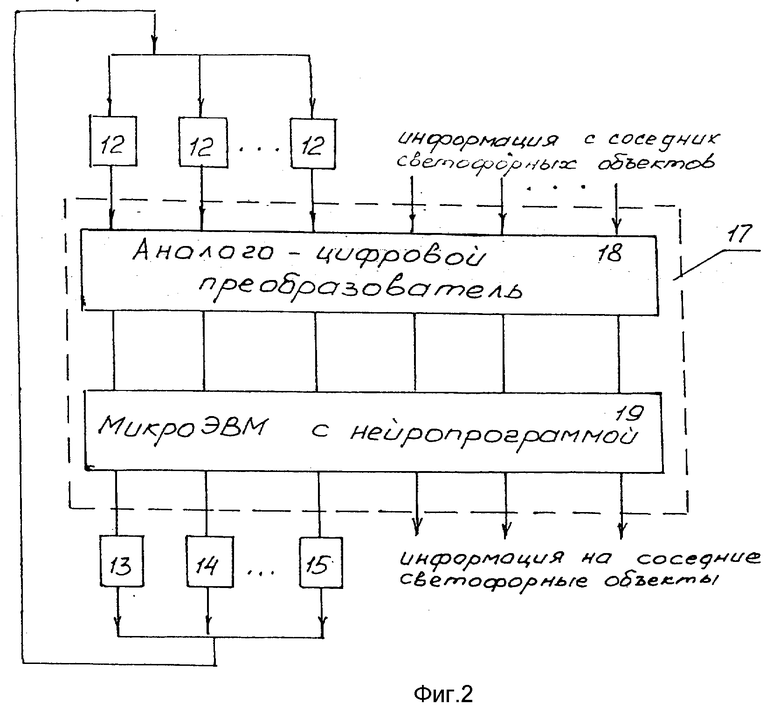
на фиг. 2 - устройство управления светофорного объекта,
на фиг. 3 - блок-схема программы обучения и самообучения нейросети.
Схема нейросетевого координированного управления транспортными потоками в границах района регулирования 1 (фиг. 1), который имеет реальную сеть улиц 2, 3, 4, 5, 6, 7 с перекрестками, на входах и выходах района регулирования расположены 8, 9, 10, 11 - контрольные светофорные объекты с датчиками 12 интенсивности движения на улицах для измерения транспортных потоков на "входах-выходах" района регулирования и внутренние светофорные объекты 13-16 со своими датчиками 12 интенсивности движения.
Схема светофорного объекта (фиг. 2) содержит датчики 12 интенсивности движения, связанные с цифровым нейроконтроллером 17, состоящим из аналого-цифрового преобразователя 18 и микроЭВМ с нейропрограммой 19, выходами соединенной с светофорными объектами 13-15. На вход цифрового нейроконтроллера 17 поступает информация с соседних светофорных объектов, а с выхода выходит информация на соседние светофорные объекты. Выходы светофорных объектов 13, 14, 15 связаны со входами датчиков информации 12.
Все светофорные объекты, снабженные микроЭВМ с нейропрограммами, связаны информационной сетью.
Способ нейросетевого координированного управления транспортными потоками в районе регулирования осуществляется следующим образом.
Предварительно измеряют и вычисляют интенсивность транспортных потоков на "входах-выходах" района регулирования на контрольных светофорных объектах 8, 9, 10, 11 с помощью датчиков 12 интенсивности движения, установленных на каждой полосе движения, устанавливают необходимые параметры движения с учетом коэффициентов предпочтений направлений движения в районе регулирования, выбирают в результате измерений план координации, наиболее близкий к контрольной совокупности.
Назначают желаемые стратегические показатели транспортных потоков на "входах-выходах" района регулирования, включающие время пропуска автотранспорта через границы района (от максимального до минимального), особенно выделяя направления и потоки транспорта общего пользования, специального транспорта с указанием соответствующего им коэффициента предпочтения с учетом всех местных условий и ограничений.
После этого выбирают схему размещения внутренних светофорных объектов 13-16, снабженных микроЭВМ с нейропрограммой, внутри района регулирования, позволяющую обеспечить стратегию с учетом условий и ограничений внутренних светофорных объектов 13-16, снабженных микроЭВМ с нейросетевой программой, которая служит для обработки информации и управления светофорными объектами внутри данного района в зависимости от этой информации, необходимой для эффективной работы способа, и тем самым выбирают в результате измерений план координации, наиболее близкий к контрольной совокупности.
Снабжают все светофорные объекты микроЭВМ с нейросетевой программой дополнительной информации с соседних внутренних светофорных объектов 13-16 по установленным информационным каналам связи и средствам взаимного обмена информацией о "входах-выходах" транспортных средств. Задачей каждого внутреннего светофорного объекта 13-16 с микроЭВМ с нейросетевой программой является максимальное уменьшение задержек транспорта на границах района за счет увеличения его пропускной способности с учетом указываемого для него приоритета для пропуска по основным направлениям движения и для спецтранспорта.
Обучают все связанные между собой информационной сетью светофорные объекты с микроЭВМ с нейропрограммой на основе данных, снятых с контрольных светофорных объектов 8-11, и подают управляющие сигналы на светофорную сигнализацию. Ситуация на дороге в каждый конкретный момент находит свое отражение в показаниях датчиков 12 интенсивности движения и включает в себя особенности конкретного момента: время суток, погодные условия, время года, гибкую смену режимов во времени, резервирование, возможные сбои, аварийные ситуации, различные предпочтения спецтранспорту и т.п. МиркоЭВМ с нейропрограммой управления учится по состоянию на перекрестках района регулирования в течение данного цикла регулирования предсказывать состояние на перекрестке района регулирования в следующий цикл регулирования и реагировать, соответственно изменяя порядок работы внутренних светофорных объектов 13-16.
Способ на светофорном объекте, например, 13 (см. фиг. 2) осуществляется следующим образом: осуществляют измерение интенсивности транспортных потоков на входах перекрестков района регулирования, подают информацию с датчиков 12 интенсивности движения с соседних светофорных объектов в цифровой нейроконтроллер 17, содержащий аналого-цифровой преобразователь 18 и микроЭВМ с нейропрограммой 19, преобразуют в аналого-цифровом преобразователе 18 в цифровую форму и подают на вход микроЭВМ 19 с нейропрограммой, в которой заложен набор коэффициентов предпочтения. С помощью нейропрограммы принимают управляющее решение и подают результаты на светофорные объекты перекрестка района регулирования.
С выходов микроЭВМ с нейропрограммой 19 на входы соседних светофорных объектов устройств подают информацию о состоянии на данном перекрестке района регулирования. Конечную информацию подают на контрольные светофорные объекты 8, 9, 10, 11, где производятся сравнение полученных параметров потока с назначенными на границах района, вычисление по формулам 3, 4 и подача управляющих сигналов на внутренние светофорные объекты 13-16.
Схема обучения и доучивания каждого светофорного объекта, связанного информационной сетью с соседними, представлен на фиг. 3 и включает ввод данных с датчиков интенсивности соседних внутренних и контрольных светофорных объектов, осуществление прямого функционирования на основе предварительного обучения и доучивания, вычисления шага обучения, обратного функционирования, модификацию подстроечных параметров. Полученные подстроечные параметры используются для следующего цикла работы программы.
Затем приступают к настройке, для этого
рассчитывают теоретически возможное и назначают желаемое (контрольное) время прохождения транспортных потоков на основных (приоритетных) направлениях и через данный управляемый район
ΔTi = (Tвыхода - Tвхода)i, (1)
где ΔTi - контрольное время прохождения транспортного средства через управляемый район регулирования,
Tвыхода - время выхода транспортного средства из района,
Tвхода - время входа транспортного средства в район,
i - номер основного направления движения.
Для каждого внутреннего светофорного объекта 13-16 проводят обучение по гибкой схеме на своем перекрестке со ступенчатым набором коэффициентов предпочтения η в магистральных направлениях. На контрольных светофорных объектах по программе вычисляют затраченное время прохождения транспортных потоков по формуле (2):
где  суммарное время задержки на n внутренних светофорных объектах,
суммарное время задержки на n внутренних светофорных объектах,
с - суммарное время прохождения транспортных средств между внутренними светофорными объектами и подхода к контрольным светофорным объектам.
Сравнивают контрольное время с затраченным временем, т.е (1) и (2), если
т. е. если контрольное время больше или равно затраченному времени, то процесс происходит без изменения. Если условие (3) не выполняется, то производят корректировку процесса за счет увеличения коэффициентов предпочтения η на внутренних управляемых светофорных объектах 13-16 по формуле (4):
где k - номер внутреннего светофорного объекта.
Таким образом, в нейропрограмме автоматически осуществляют обратную связь и настройку способа управления транспортными потоками и самонастройку. При поступающих новых изменениях коэффициента предпочтения с контрольных светофорных объектов 8-11 внутренние светофорные объекты 13-16 перестраиваются, выдают новую информацию всем светофорам и в целом вся сеть управляемого района самонастраивается. При обучении нейропрограммы на основе объективных реальных данных в различные периоды суток включены условия изменения работы отдельных светофорных объектов всего района, настройка, доучивание происходит автоматически и постоянно.
Таким образом, использование способа нейросетевого координированного управления транспортными потоками в районе регулирования позволяет эффективно автоматически управлять транспортными потоками за счет выбора схемы размещения светофорных объектов, снабженных микроЭВМ, с помощью обучающейся и самообучающейся нейропрограммы, учитывающей все ситуации в регулируемом районе, обучения на основе практической выборки задач всех светофорных объектов, связанных информационной сетью, сравнения полученных параметров, корректировки и осуществления обратной связи путем подачи сигналов на контрольные объекты, осуществления самонастройки системы управления.
Способ предусматривает активный подход, при котором устанавливают данное возможное время прохода транспортных средств и в соответствии с этим назначают желаемое время прохождения транспортных средств через сеть светофорных объектов, которая обеспечивает ее выполнение с учетом всех условий.
Предложенный способ имеет конкретную реализацию, основанную на светофорных объектах с нейропрограммами управления, работает по гибкой системе, обученной и самонастраивающейся.
Технико-экономическое обоснование.
Светофорное регулирование в г. Красноярске осуществляется по жесткой схеме без учета интенсивности движения транспортных средств и пешеходных потоков и имеет следующие недостатки: увеличенное время прохождения транспорта и пешеходов, заторы и связанные с этим значительный расход топлива, повышенная загазованность и др.
Применение АСУД "Город" на базе технических средств третьего поколения по результатам внедрения в ряде городов (Ташкент, Алма-Ата, Новосибирск) дает изменение показателей дорожного движения: уменьшена задержка транспортных средств на 10%, увеличена скорость сообщения на 10-12%, сократилось количество дорожно-транспортных происшествий, улучшился оперативный надзор за движением и др. Данная система наиболее современна, но обладает сложностью в ее создании, заключающейся в направлении перебора вариантов с последующей общей и местной коррекцией программы, отсутствии возможности доучивания, обучения и самообучения управляющих устройств, громоздкостью информационных и управляющих устройств (см. Кременец Ю.А. Технические средства организации дорожного движения. М.: Транспорт, 1990 г.)
Предлагаемый способ нейросетевого координированного управления транспортными потоками управляемого района регулирования является очередным шагом по совершенствованию системы управления транспортными потоками района, способен исключить вышеуказанные недостатки благодаря возможности обучения, доучивания и самообучения нейропрограммных управляющих устройств с поэтапным внедрением от натурного сбора информации с набором нескольких временных программ управления до автоматически информационно-управляющей системы, упрощению информационно-управляющих устройств за счет их совмещения. Предлагаемый способ вместе с нейропрограммой управления может быть локальным и координированным (по магистралям) с выделением приоритетов и специальных назначений.
| название | год | авторы | номер документа |
|---|---|---|---|
| НЕЙРОСЕТЕВОЙ СПОСОБ МЕЖРАЙОННОГО КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМИ ПОТОКАМИ | 1999 |
|
RU2169946C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СВЕТОФОРНЫМ ОБЪЕКТОМ С ЭВМ С НЕЙРОПРОГРАММАМИ | 1998 |
|
RU2151424C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСУЩЕЙ СПОСОБНОСТЬЮ МНОГОПРОЛЕТНОЙ НЕРАЗРЕЗНОЙ БАЛКИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2122188C1 |
| КОНТРОЛЬНО-УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ НАПРЯЖЕННО-ДЕФОРМИРОВАННЫМ СОСТОЯНИЕМ НЕРАЗРЕЗНОЙ БАЛКИ | 1994 |
|
RU2105959C1 |
| Способ координированного управления транспортными потоками | 2015 |
|
RU2613550C2 |
| АРОЧНОЕ ПОКРЫТИЕ | 2000 |
|
RU2209275C2 |
| СТЕНД ДЛЯ ОБУЧЕНИЯ | 2001 |
|
RU2217799C2 |
| Обучающее устройство | 1984 |
|
SU1249566A1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 1997 |
|
RU2131961C1 |
| ПОЛНОСБОРНОЕ ЗДАНИЕ ИЛИ СООРУЖЕНИЕ ЗАМКНУТОГО ТИПА, ВКЛЮЧАЮЩЕЕ ФУНДАМЕНТ, ДЛЯ СТРОИТЕЛЬСТВА НА ВЕЧНОМЕРЗЛЫХ, СЛАБЫХ, ПУЧИНИСТЫХ ГРУНТАХ И В СЕЙСМИЧЕСКИХ ЗОНАХ | 2001 |
|
RU2215852C2 |
Изобретение относится к координированному управлению транспортными потоками в районах регулирования с использованием нейронных сетей. Технический результат изобретения заключается в повышении эффективности автоматического управления транспортными потоками с помощью обучающейся и самообучающейся нейронной сети, обусловленной увеличением в установленный промежуток времени пропускной способности транспортных средств в управляемом районе регулирования, уменьшением задержек движения, предотвращением заторов и т.д. Способ основан на измерении интенсивности транспортных потоков на входах перекрестков района регулирования, выборе в результате измерений плана координации, наиболее близкого к контрольной совокупности, и подаче управляющих сигналов на светофорную сигнализацию, причем предварительно назначают желаемые показатели на "входах-выходах" района регулирования на контрольных светофорных объектах, после чего выбирают схему размещения светофорных объектов внутри района регулирования, снабжают все светофорные объекты микроЭВМ с нейропрограммой и средствами выборки задач, обучают все связанные информационной сетью светофорные объекты, сравнивают полученные параметры потоков с назначенными на границах района и при наличии существенных отклонений осуществляют обратную связь путем подачи сигналов с контрольных светофорных объектов на внутренние светофорные объекты, в итоге осуществляют самонастройку системы управления транспортными потоками. 3 ил.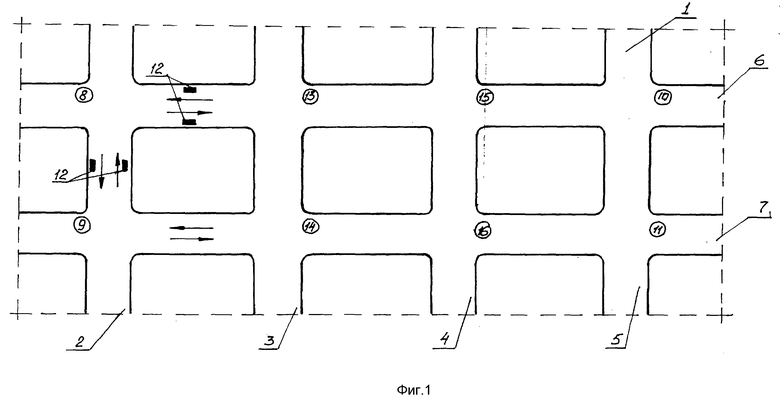
Способ нейросетевого координированного управления транспортными потоками в районе регулирования, основанный на измерении интенсивности транспортных потоков на входах перекрестков района регулирования, выборе в результате измерений плана координации, наиболее близкого к контрольной совокупности, и подаче управляющих сигналов на светофорную сигнализацию, отличающийся тем, что назначают желаемые показатели по коэффициентам предпочтений на "входах-выходах" района регулирования на контрольных светофорных объектах на основе предварительно измеренных и вычисленных интенсивностей транспортных потоков на "входах-выходах" района регулирования, после чего выбирают схему размещения внутренних светофорных объектов внутри района регулирования, позволяющую обеспечить стратегию управления с учетом условий и ограничений, снабжают все светофорные объекты микроЭВМ с нейропрограммой и средствами взаимного обмена информацией об интенсивности транспортных потоков на "входах-выходах" района регулирования, обучают все связанные информационной сетью светофорные объекты, снабженные микроЭВМ с нейропрограммой на основе практической выборки задач, учитывающей гибкую смену режимов во времени, резервирование, возможные сбои, аварийные ситуации, различные предпочтения спецтранспорту и т.п., сравнивают полученные параметры потоков с назначенными желаемыми показателями по коэффициентам предпочтений на "входах-выходах" района регулирования и при наличии существенных отклонений осуществляют обратную связь путем подачи сигналов по коэффициентам предпочтений с контрольных светофорных объектов на "входах-выходах" района регулирования, снабженных микроЭВМ с нейропрограммой, на внутренние светофорные объекты внутри района регулирования.
| Способ координированного управления транспортными потоками | 1973 |
|
SU510957A1 |
| Способ управления движением транспортных средств на перекрестке | 1987 |
|
SU1462395A1 |
| Способ управления движением транспортных потоков на перекрестке | 1986 |
|
SU1399800A1 |
| Линзово-зеркальная антенна | 1988 |
|
SU1536460A1 |
| DE 1926921 A1, 28.09.72 | |||
| Способ координированного управления транспортными потоками | 1986 |
|
SU1324049A1 |
| Способ управления движением автомобильного транспорта | 1974 |
|
SU690538A1 |
| US 3503040 A, 24.03.70 | |||
| US 3737847 A, 05.06.73. | |||
