Изобретение относится к координированному управлению дорожным движением, способам управления транспортными потоками в районах регулирования с использованием нейронных сетей.
Известен способ управления движением транспортных потоков на перекрестке, при котором измеряют интенсивность движения транспортных потоков на каждом направлении перекрестка путем подсчета за период опроса количества транспортных средств на каждом направлении перекрестка и последовательном переключении светофорных сигналов, при котором определяют среднюю интенсивность транспортных потоков на перекрестке для каждой из возможных для данного перекрестка фаз регулирования путем подсчета за период сброса, величина которого в 10-30 раз больше величины цикла управления светофорной сигнализацией, числа транспортных средств на всех направлениях движения каждой фазы и деления его на число направлений движения, участвующих в данной фазе. Для каждого направления движения перекрестка определяют абсолютное значение величины отклонения интенсивности транспортных потоков на нем от величины средней интенсивности транспортных потоков фазы регулирования, при которой участвует данное направление, суммируют абсолютные отклонения интенсивностей движения для фаз, входящих в каждую из возможных программ регулирования, сравнивают полученные суммы и выбирают на следующий период опроса программу управления с наименьшей суммой отклонений интенсивностей движения транспортных средств по направлениям, входящим в данную программу управления, от величин средних интенсивностей потоков соответствующих фаз регулирования [1].
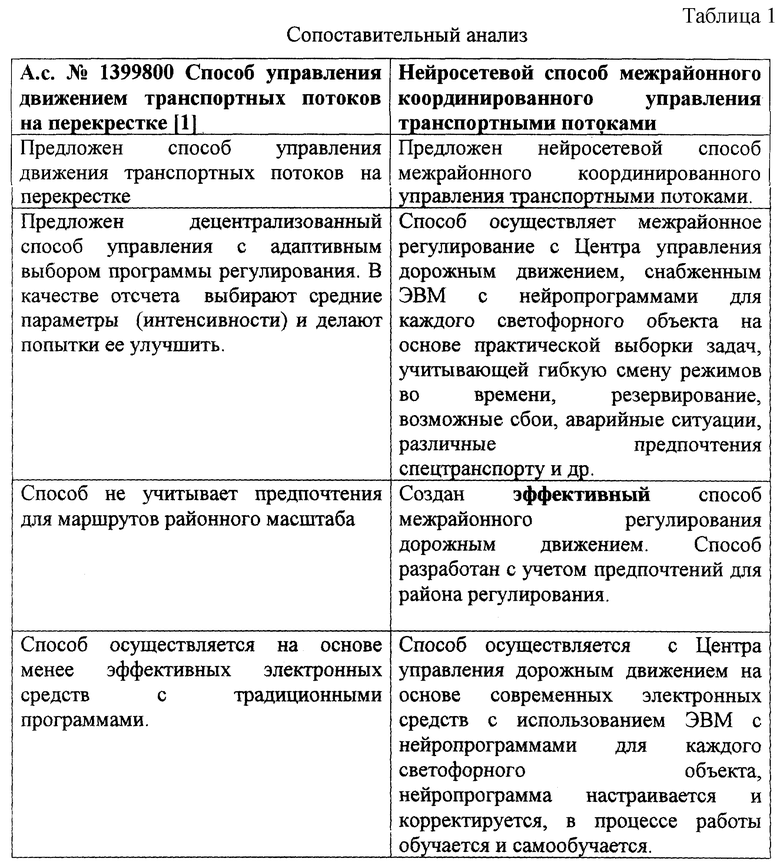
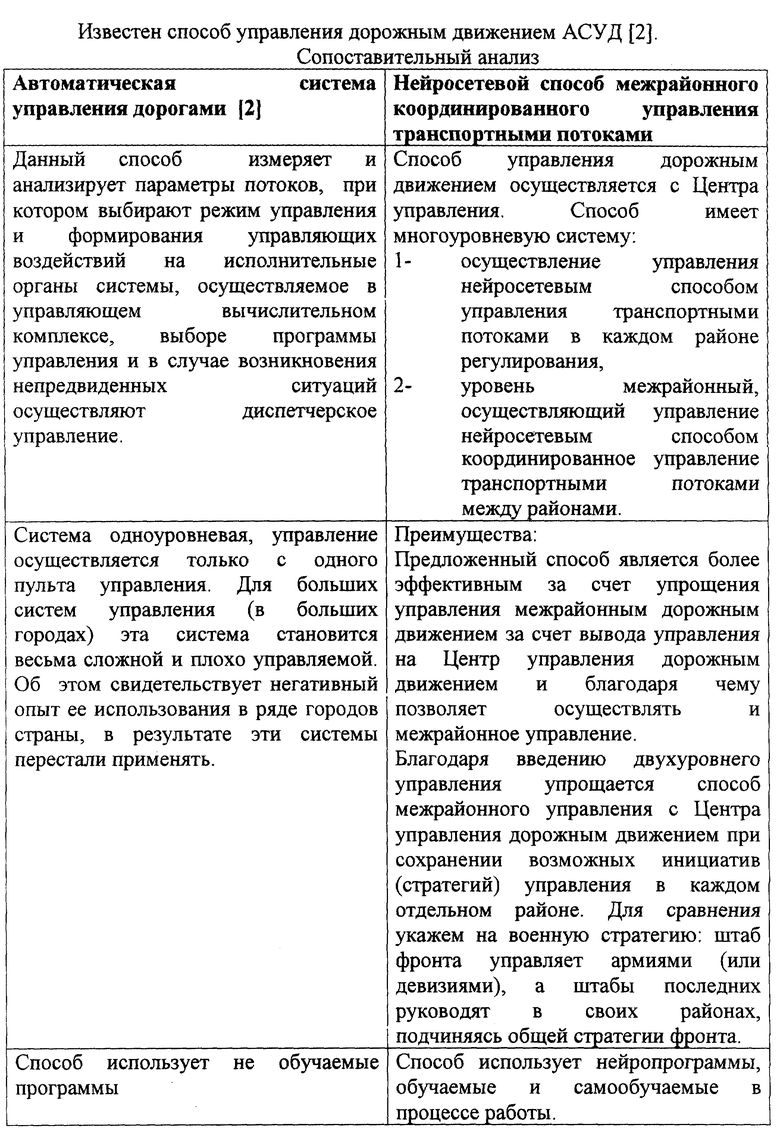
Сопоставительный анализ приведен в табл. 1
Известен способ нейросетевого координированного управления транспортными потоками в районе регулирования, основанный на измерении интенсивности транспортных потоков на входах перекрестков района регулирования, выборе в результате измерений плана координации, наиболее близкого к контрольной совокупности, и подаче управляющих сигналов на светофорную сигнализацию, при котором назначают желаемые показатели по коэффициентам предпочтений на "входах-выходах" района регулирования на контрольных светофорных объектах на основе предварительно измеренных и вычисленных интенсивностей транспортных потоков на "входах-выходах" района регулирования, после чего выбирают схему размещения светофорных объектов внутри района регулирования, позволяющую обеспечить стратегию управления с учетом условий и ограничений, снабжают все светофорные объекты микроЭВМ с нейропрограммой и средствами взаимного обмена информацией об интенсивности транспортных потоков на "входах-выходах" района регулирования, обучают все связанные информационной сетью светофорные объекты, снабженные микроЭВМ с нейропрограммой на основе практической выборки задач, учитывающей гибкую смену режимов во времени, резервирование, возможные сбои, аварийные ситуации, различные предпочтения спецтранспорту и т.п., сравнивают полученные параметры потоков с назначенными желаемыми показателями по коэффициентам предпочтений на "входах-выходах" района регулирования, и при наличии существенных отклонений осуществляют обратную связь путем подачи сигналов по коэффициентам предпочтений с контрольных светофорных объектов на "входах-выходах" района регулирования, снабженных микроЭВМ с нейропрограммой, на внутренние светофорные объекты внутри района регулирования [3].
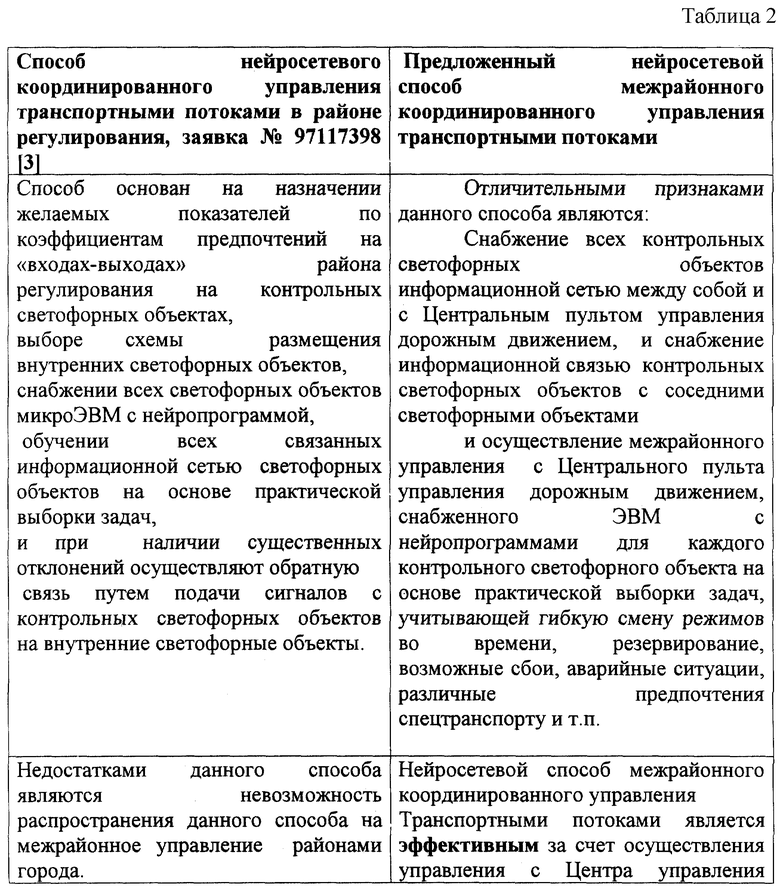
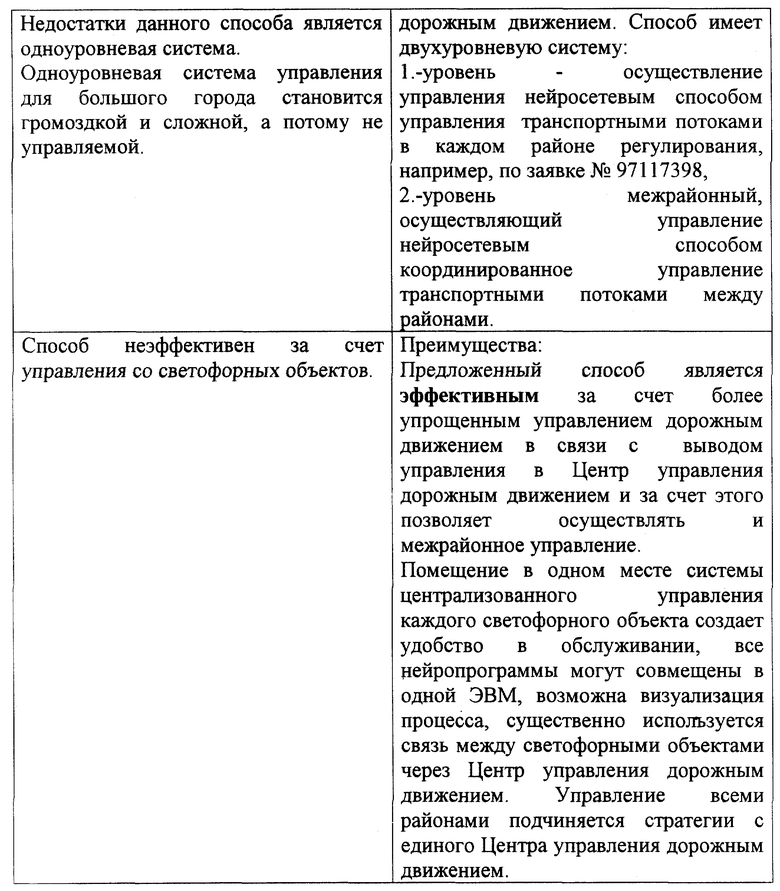
Недостатки данного изобретения, принятого за прототип, изложены в сопоставительном анализе в табл. 2.
Целью изобретения является эффективность межрайонного управления дорожным движением за счет снабжения связью между собой контрольных светофорных объектов и с Центром управления дорожным движением и управление дорожным движением с Центра управления дорожным движением.
Это позволяет эффективно управлять дорожным движением, способ более прост в управлении, все управление осуществляется с Центра управления дорожным движением, что создает удобство в управлении, позволяет осуществлять визуализацию способа, удобство в обслуживании и ремонте, все управление сосредоточено в одном месте.
Цель достигается тем, что нейросетевой способ межрайонного координированного управления транспортными потоками, при котором
измеряют интенсивность транспортных потоков на "входах-выходах" района регулирования, выбирают в результате измерений план координации, наиболее близкий к контрольной совокупности, назначают желаемые показатели по коэффициентам предпочтений на "входах-выходах" района регулирования на контрольных светофорных объектах на основе предварительно измеренных и вычисленных интенсивностей транспортных потоков на "входах-выходах" района регулирования, выбирают схему размещения внутренних светофорных объектов внутри района регулирования, позволяющую обеспечить стратегию управления с учетом условий и ограничений, снабжают все светофорные объекты микроЭВМ с нейропрограммой и средствами взаимного обмена информацией об интенсивности транспортных потоков на "входах-выходах" района регулирования, обучают все связанные информационной сетью светофорные объекты, снабженные мироЭВМ с нейропрограммой на основе практической выборки задач, учитывающей гибкую смену режимов во времени, резервирование, возможные сбои, аварийные ситуации, различные предпочтения спецтранспорту и т.п., сравнивают полученные параметры транспортных потоков с назначенными желаемыми показателями по коэффициентам предпочтений на "входах-выходах" района регулирования, и при наличии существенных отклонений осуществляют обратную связь путем подачи сигналов по коэффициентам предпочтений с контрольных светофорных объектов на "входах-выходах" района регулирования, снабженных микроЭВМ с нейропрограммой, на внутренние светофорные объекты,
при котором разделяют весь город регулирования дорожным движением на отдельные районы регулирования, на границах которых устанавливают контрольные светофорные объекты,
снабжают все контрольные светофорные объекты микроЭВМ с нейропрограммой, которая управляет внутренними светофорными объектами каждого соответствующего района регулирования, и информационной связью между собой, а также с Центром управления дорожным движением,
снабжают Центр управления дорожным движением ЭВМ с нейропрограммой, которая управляет всеми контрольными светофорными объектами всех районов регулирования,
осуществляют межрайонное управление контрольными светофорными объектами с Центра управления дорожным движением, которое включает следующие действия:
измеряют интенсивность транспортных потоков на "входах-выходах" района регулирования,
выбирают в результате измерений план координации, наиболее близкий к контрольной совокупности,
назначают желаемые показатели по коэффициентам предпочтений на "входах-выходах" района регулирования на контрольных светофорных объектах на основе предварительно измеренных и вычисленных интенсивностей транспортных потоков на "входах-выходах" района регулирования,
выбирают схему размещения внутренних светофорных объектов внутри каждого района регулирования, позволяющую обеспечить с контрольных светофорных объектов внутри района стратегию управления с учетом условий и ограничений,
обучают все связанные информационной сетью светофорные объекты, на основе практической выборки задач, учитывающей гибкую смену режимов во времени, резервирование, возможные сбои, аварийные ситуации, различные предпочтения спецтранспорту,
сравнивают полученные параметры транспортных потоков с назначенными желаемыми показателями по коэффициентам предпочтений на "входах-выходах" района регулирования и при наличии существенных отклонений,
осуществляют обратную связь с контрольных светофорных объектов путем подачи корректирующих сигналов на внутренние светофорные объекты, обеспечивая регламентированную стратегию управления внутри каждого района регулирования,
осуществляют регулирование внутри каждого района регулирования одновременно взаимосвязано с межрайонным управлением на основе управляющих сигналов с контрольных светофорных объектов каждого района, управляют внутри каждого района через внутренние светофорные объекты, для этого
снабжают все светофорные объекты микроЭВМ с нейропрограммой и средствами взаимного обмена информацией об интенсивности транспортных потоков на "входах-выходах" района регулирования, обучают все связанные информационной сетью светофорные объекты на основе практической выборки задач, учитывающей гибкую смену режимов во времени, резервирование, возможные сбои, аварийные ситуации, различные предпочтения спецтранспорту и т.п., сравнивают полученные параметры потоков с назначенными желаемыми показателями по коэффициентам предпочтений на "входах-выходах" района регулирования и при наличии существенных отклонений осуществляют обратную связь путем подачи сигналов по коэффициентам предпочтений с контрольных светофорных объектов на "входах-выходах" района регулирования на внутренние светофорные объекты.
Предлагаемый нейросетевой способ межрайонного координированного управления транспортными потоками является эффективным за счет управления дорожным движением с Центра управления дорожным движением, где находится ЭВМ с нейропрограммой для управления контрольными светофорными объектами. Данный способ осуществляют двумя уровнями: межрайонное управление контрольными светофорными объектами с Центра управления дорожным движением, снабженным ЭВМ с нейропрограммой, которая управляет всеми контрольными светофорными объектами и одновременно взаимосвязано с межрайонным управлением, при котором осуществляют регулирование внутри каждого района регулирования на основе управляющих сигналов с контрольных светофорных объектов каждого района регулирования через внутренние светофорные объекты. Осуществление управления с Центра управления дорожным движением позволяет эффективно обслуживать, поддерживать постоянную температуру, обеспечивает надежность и устойчивость в работе, осуществляет визуализацию способа.
Принятая терминология:
Район регулирования - это некоторый район города, имеющий определенные магистральные направления.
Межрайонное регулирование - управление сразу несколькими районами регулирования.
Контрольные светофорные объекты - понимается набор устройств, обеспечивающих регулирование дорожного движения. В устройство входят непосредственно светофор, датчики интенсивности дорожного движения, нейроконтроллер с микроЭВМ с нейропрограммой. Контрольные светофорные объекты устанавливаются на границах района регулирования, снабжены информационной связью с соседними светофорными объектами и Центром управления дорожным движением. МикроЭВМ с нейропрограммой дополнительно сверяет затраченное время с установленными контрольными критериями времени пропуска транспортных средств и выдает управляемые сигналы на внутренние светофорные объекты с указанием коэффициента предпочтений, а также выдает и получает управляющую информацию на Центр управления дорожным движением.
Внутренние светофорные объекты - понимается набор устройств, обеспечивающих регулирование дорожного движения. В устройство входят: непосредственно светофор, датчики интенсивности движения, цифровой нейроконтроллер с аналого-цифровым преобразователем и микроЭВМ с нейропрограммой. Цифровой нейроконтроллер принимает входную информацию с соседних светофорных объектов и выдает информацию на соседние светофорные объекты, микроЭВМ обучена на основе натурных обследований и самообучается в процессе эксплуатации. Внутренние информационные объекты имеют информационную связь между собой и с контрольными светофорными объектами.
Способ представлен на фигурах:
На фиг. 1 - предложена схема нейросетевого способа межрайонного координированного управления транспортными потоками,
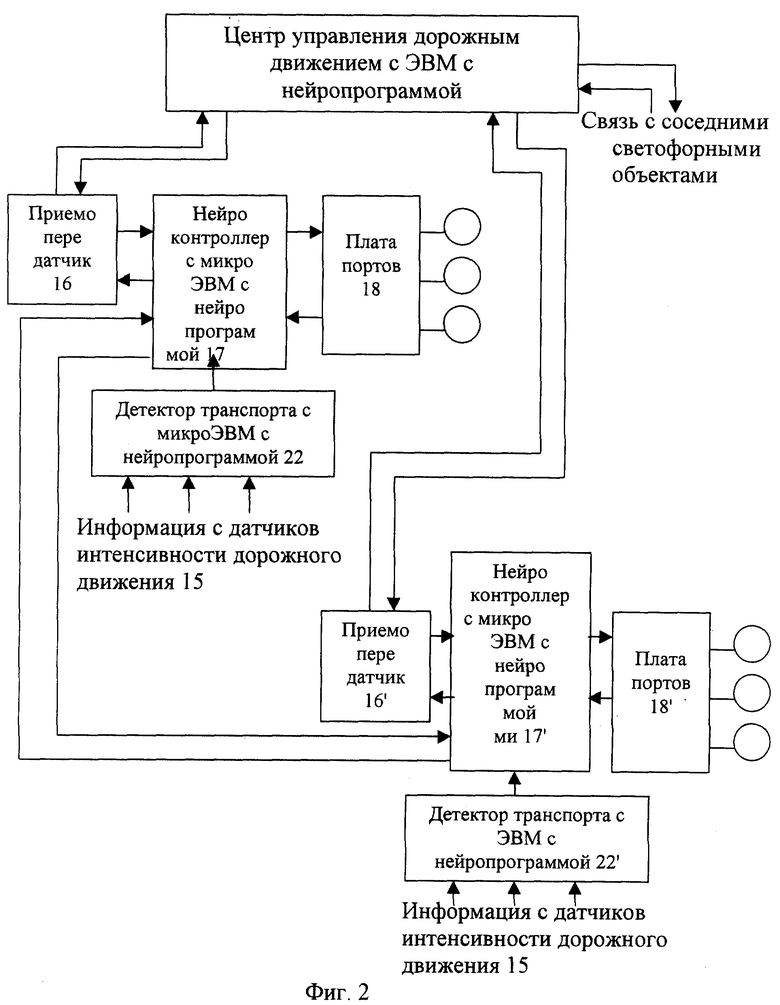
на фиг. 2 - устройство межрайонного координированного управления транспортными потоками,
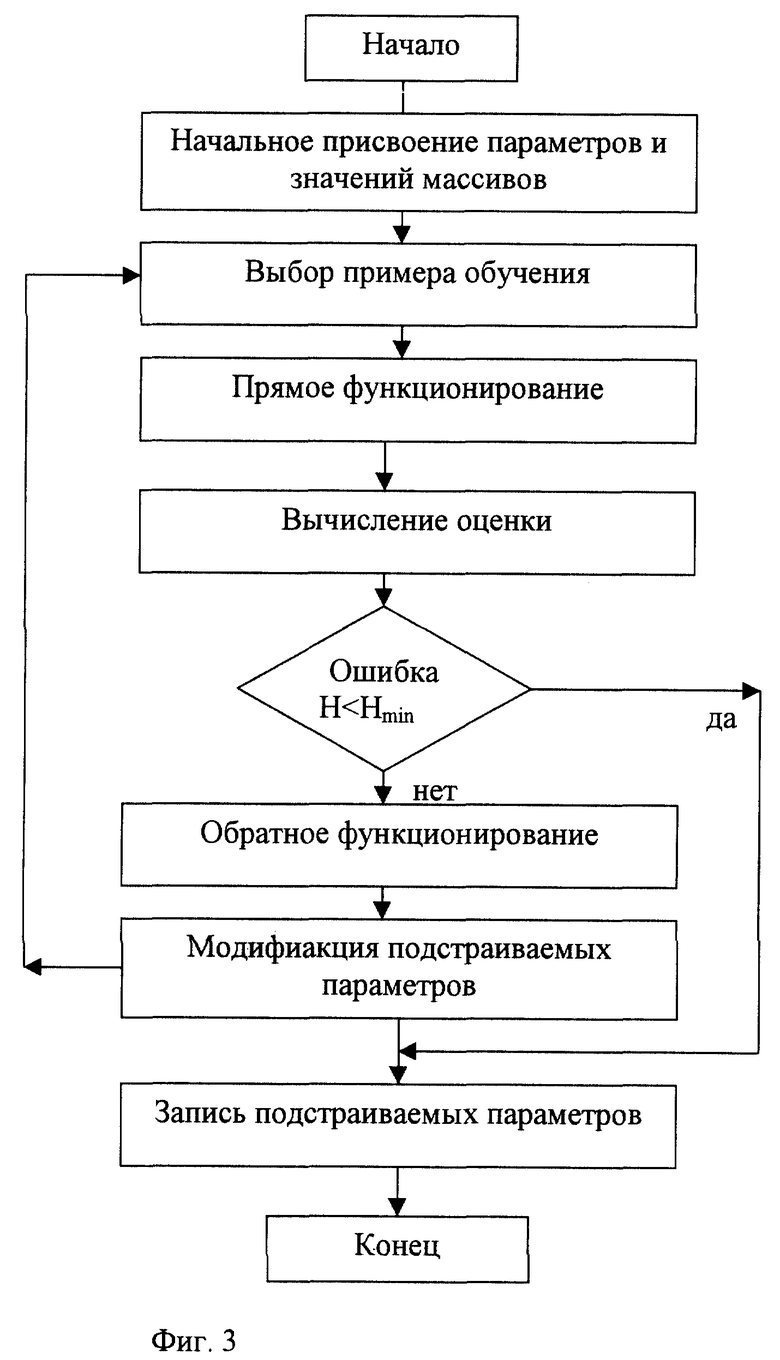
на фиг. 3 - схема обучения нейропрограммы микроЭВМ нейроконтроллера: на входе - интенсивность движения, на выходе - время горения зеленого сигнала.
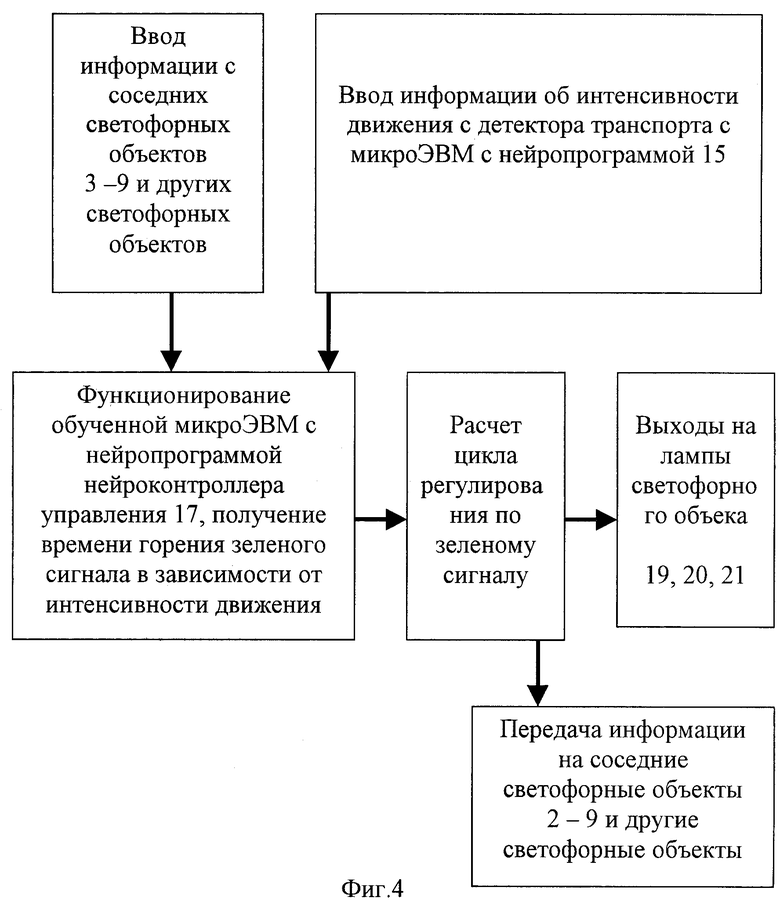
На фиг. 4 - схема функционирования нейропрограммы нейроконтроллера с ЭВМ,
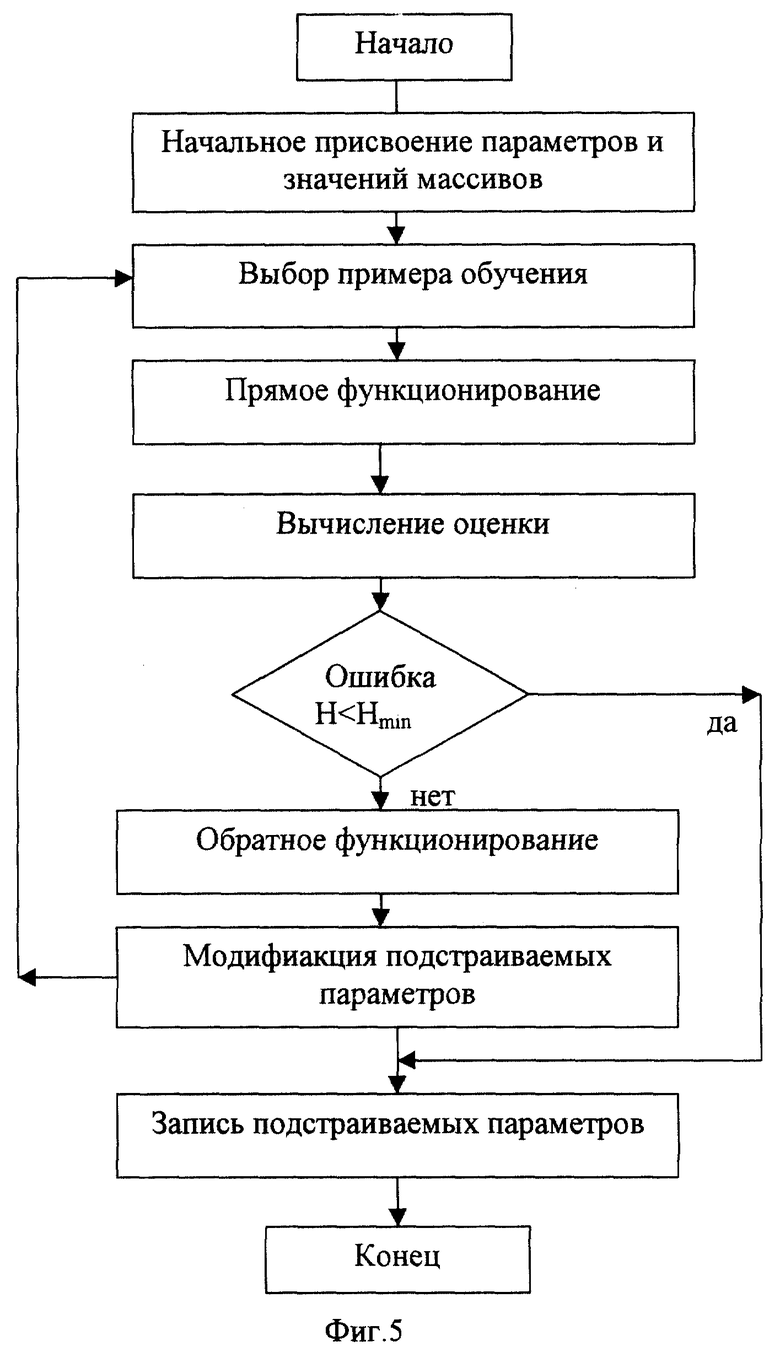
На фиг. 5 - схема обучения нейропрограммы детектора транспорта 22 на распознавание вида и количества транспорта. Аналогичная схема обучения нейропрограммы ЭВМ нейроконтроллера (см фиг. 3), на входе - показания датчиков транспорта, на выходе - интенсивность движения.
Способ содержит:
Центр управления дорожным движением 1, снабженный ЭВМ с нейропрограммой для каждого контрольного светофорного объекта (на примере управления районом), см. фиг. 1, управляет контрольными светофорными объектами 2, 3, 4, 5, связанными между собой, с Центром управления дорожным движением 1 и с соседними внутренними светофорными объектами 6, 7, 8, 9, расположенными на улицах 10, 11, 12, 13, 14 района. Центр управления дорожным движением 1 снабжают ЭВМ с нейропрограммой, которая управляет всеми контрольными светофорными объектами 2, 3, 4, 5. Все внутренние светофорные объекты 6, 7, 8, 9 соединены информационной связью между собой и с контрольными светофорными объектами 2, 3, 4, 5.
Весь город регулирования дорожным движением разделяют на отдельные районы регулирования, на границах которого устанавливают контрольные светофорные объекты 2, 3, 4, 5. Все контрольные светофорные объекты снабжают микроЭВМ с нейропрограммой, которая управляет внутренними светофорными объектами 6, 7, 8, 9 каждого соответствующего района регулирования и информационной связью между собой, с соседними сетофорными объектами и с Центром управления дорожным движением 1.
На обеих сторонах улиц района регулирования расположены датчики интенсивности дорожного движения 15, связанные с каждым светофорным объектом.
Схема нейросветофорного способа межрайонного координированного управления транспортными потоками (см. фиг. 2) содержит Центр управления дорожным движением 1, связанный входом выходом с приемопередатчиком 16, который входом выходом связан с нейроконтроллером 17 с ЭВМ с нейропрограммой, связанный входом выходом с платой портов 18, имеющей выходы на лампы светофорного объекта красного 19, желтого 20 и зеленого 21 цветов. Нейроконтроллер 17 выходом связан с входом детектора транспорта с ЭВМ с нейропрограммой 22, на который поступает информация с датчиков интенсивности дорожного движения 15.
Такой же район регулирования содержит связанный входом выходом приемопередатчик 16 с Центром управления дорожным движением. Приемопередатчик 16 входом выходом связан с нейроконтроллером 17 с ЭВМ с нейропрограммой, связанный входом выходом с платой портов 18, имеющей выходы на лампы светофорного объекта красного 19, желтого 20 и зеленого 21 цветов. Нейроконтроллер 17 выходом связан с входом детектора транспорта с ЭВМ с нейропрограммой 22, на который поступает информация с датчиков интенсивности дорожного движения 15.
Каждый район регулирования дорожным движением города через контрольные светофорные объекты 2, 3, 4, 5 имеет информационную связь между собой, с Центром управления дорожным движением 1 и с внутренними светофорными объектами 6, 7, 8, 9.
Таким образом, Центр управления дорожным движением имеет прямую и обратную связь с каждым районом регулирования и каждым контрольным светофорным объектом. Центр управления дорожным движением содержит ЭВМ с нейропрограммой для каждого контрольного светофорного объекта, имеет информацию с каждого контрольного светофорного объекта района регулирования и между районами регулирования.
Нейросетевой способ межрайонного координированного управления транспортными потоками осуществляют следующим образом:
разделяют весь город регулирования дорожным движением на отдельные районы регулирования, на границах которых устанавливают контрольные светофорные объекты 2, 3, 4, 5,
снабжают все контрольные светофорные объекты 2, 3, 4, 5 информационной связью между собой и с Центром управления дорожным движением 1, снабженным ЭВМ с нейропрограммой для каждого контрольного светофорного объекта 2, 3, 4, 5,
снабжают Центр управления дорожным движением 1 ЭВМ с нейропрограммой, которая управляет всеми контрольными светофорными объектами 2, 3, 4, 5 всех районов регулирования,
осуществляют межрайонное управление с Центра управления дорожным движением, снабженного ЭВМ с нейропрограммой для каждого контрольного светофорного объекта 2, 3, 4, 5, при котором
измеряют интенсивность транспортных потоков на "входах-выходах" района регулирования,
выбирают в результате измерений план координации, наиболее близкий к контрольной совокупности,
назначают желаемые показатели по коэффициентам предпочтений на "входах-выходах" района регулирования на контрольных светофорных объектах 2, 3, 4, 5 на основе предварительно измеренных и вычисленных интенсивностей транспортных потоков на "входах-выходах" района регулирования,
выбирают схему размещения внутренних светофорных объектов 6, 7, 8, 9 внутри каждого района регулирования, позволяющую обеспечить стратегию управления с контрольных светофорных объектов 2, 3, 4, 5 с учетом условий и ограничений,
обучают все связанные информационной сетью светофорные объекты, снабженные микроЭВМ с нейропрограммой на основе практической выборки задач, учитывающей гибкую смену режимов во времени, резервирование, возможные сбои, аварийные ситуации, различные предпочтения спецтранспорту и т.п.
МикроЭВМ с нейропрограммами управления учится по состоянию в районе в следующий цикл регулирования реагировать, соответственно изменяя порядок работы внутренних светофорных объектов 6, 7, 8, 9, т.е. таким образом подают управляющие сигналы на светофорную сигнализацию на входы ЭВМ с нейропрограммой.
Управляющие сигналы, подаваемые на светофорные объекты, вырабатывают с помощью ЭВМ с нейропрограммой. На входы нейропрограммы подают показания с датчиков интенсивности дорожного движения 15, характеризующих ситуацию в районе регулирования (состояние транспортного потока регулирования и т.п.), а также информацию с соседних светофорных объектов 6, 7, 8, 9 о состоянии на данном направлении.
С выходов нейропрограммы снимают время горения зеленого сигнала. Нейропрограмма осуществляет обучение, в результате которого с помощью подстраиваемых (управляемых) параметров строит прямую зависимость.
Нейропрограмма обучена на компьютере с использованием данных натурных экспериментов (или расчетных данных). В процессе работы программа доучивается. Нейропрограмма обучения заложена в ЭВМ в нейропрограмму и содержит все правила, выраженные в неявном виде (обучающей выборке). Для обучения ЭВМ имеются стандартные алгоритмы, это известные отечественные и мировые. [4]. Алгоритм, на котором работает ЭВМ, составлен в полном соответствии с имеющимися отечественными и мировыми программами для обучения нейросети, в частности с алгоритмом двойственного функционирования, опубликованного в институте Биофизики СО АН [5].
сравнивают полученные параметры транспортных потоков с назначенными желаемыми показателями по коэффициентам предпочтений на "входах-выходах" района регулирования с учетом местных условий и ограничений. Назначенные желаемые стратегические показатели транспортных потоков в районе регулирования включают время пропуска транспортных средств через район, выделяя направления и потоки транспорта как общего пользования, так и специального назначения с указанием им предпочтений эти параметры и сравнивают с данными на границах района регулирования и при наличии существенных отклонений,
затем осуществляют обратную связь с контрольных светофорных объектов 2, 3, 4, 5 путем подачи корректирующих сигналов на внутренние светофорные объекты 6, 7, 8, 9, обеспечивая регламентированную стратегию управления внутри каждого района регулирования,
осуществляют регулирование транспортных потоков внутри каждого района регулирования одновременно взаимосвязано с межрайонным управлением на основе управляющих сигналов с контрольных светофорных объектов 2, 3, 4, 5 каждого района 6, 7, 8, 9, управляют внутри каждого района через внутренние светофорные объекты 6, 7, 8, 9, для этого
снабжают все светофорные объекты микроЭВМ с нейропрограммой и средствами взаимного обмена информацией об интенсивности транспортных потоков на "входах-выходах" района регулирования, обучают все связанные информационной сетью светофорные объекты на основе практической выборки задач, учитывающей гибкую смену режимов во времени, резервирование, возможные сбои, аварийные ситуации, различные предпочтения спецтранспорту и т.п., сравнивают полученные параметры потоков с назначенными желаемыми показателями по коэффициентам предпочтений на "входах-выходах" района регулирования и при наличии существенных отклонений осуществляют обратную связь путем подачи сигналов по коэффициентам предпочтений с контрольных светофорных объектов 2, 3, 4, 5 на "входах-выходах" района регулирования на внутренние светофорные объекты 6, 7, 8, 9.
Контрольный светофорный объект 2 связан информационной сетью с соседними светофорными объектами 3, 4, 5, 6, 7, 8, 9, и соответствующая обработанная информация поступает с Центра управления дорожным движением 1 с ЭВМ с нейропрограммой для каждого контрольного светофорного объекта 2-9.
Таким образом данный способ обеспечивает беспрерывное межрайонное управление транспортными потоками.
С контрольных светофорных объектов 2, 3, 4, 5 и соседних светофорных объектов 6, 7, 8, 9 информация о состоянии дорожного движения в каждом районе поступает в Центр управления дорожным движением 1 с ЭВМ с нейропрограммой для каждого контрольного светофорного объекта, и эти данные образуют практическую выборку задач для обучения и самообучения в процессе работы нейропрограммы в Центре управления дорожным движением 1.
Схема обучения и доучивания нейропрограммы каждого светофорного объекта, связанного информационной сетью с соседними светофорными объектами, представлена на фиг. 3 и включает в себя ввод входной информации с датчиков транспорта 15, установленных на каждой полосе движения, функционирование обученной ЭВМ с нейропрограммой детектора транспорта 15, передачу полученной интенсивности транспортного потока на ЭВМ с нейропрограммой нейроконтроллера 17.
Нейросетевой способ межрайонного координированного управления транспортными потоками (см. фиг. 2), например на контрольном светофорном объекте 6, осуществляют следующим образом.
В нейроконтроллер с ЭВМ с нейропрограммой 17, предварительно обученной на практическую выборку задач, учитывающую гибкую смену режимов во времени, резервирование, аварийные ситуации, а также предпочтения спецтранспорту и корректировку поступающей информации с контрольных светофорных объектов 2, 3, 4, 5 и соседних светофорных объектов 6, 7, 8, 9, поступает информация через приемопередатчик 16 с Центра управления дорожным движением 1 с ЭВМ с нейропрограммой, предварительно обученной на распознавание вида и количества транспорта на перекрестке, направления его движения, скорости движения, полосы движения на основе информации с датчиков транспорта 15.
Нейроконтроллер с микроЭВМ с нейропрограммой 17 осуществляет управление транспортными потоками через плату портов 18, подающую сигналы включения-выключения определенных групп ламп 19, 20, 21 контрольного светофорного объекта 6 с учетом информации на соседних светофорных объектах 3, 4, 5, 7, 8, 9 и через них с другими светофорными объектами с учетом информации на основе корректирующих коэффициентов предпочтения от контрольных светофорных объектов 2, 3, 4, 5.
Нейроконтроллер 17 с микроЭВМ с нейропрограммой имеет предварительно обученную нейропрограмму на основе натурных обследований на основе корректирующих коэффициентов предпочтения, которая самообучается в процессе эксплуатации. На основе нейропрограммы в результате обучения каждого светофорного объекта контрольного и соседнего производится настройка на оптимальную работу, как и обучение с указанными ему коэффициентами предпочтения. В процессе эксплуатации каждый светофорный объект получает дополнительную информацию и совершает свою управляющую работу путем доучивания, как предусмотрено алгоритмом нейропрограммы, т.е. светофорные объекты работают с прямой и обратной связью, взаимодействуют между собой.
Схема обучения нейропрограммы микроЭВМ нейроконтроллера 17 представлена на фиг. 3 и осуществляется по известной методике [3].
Схема функционирования нейропрограммы микроЭВМ контроллера 17 представлена на фиг. 4 и осуществляется следующим образом:
ввод информации с соседних светофорных объектов 6, 7, 8, 9 и через них с другими светофорными объектами и информация об интенсивности движения транспортного потока с детектора транспорта с ЭВМ с нейропрограммой 15 поступает на функционирование обученной ЭВМ с нейропрограммой нейроконтроллера управления 17, получение времени горения зеленого сигнала в зависимости от интенсивности движения с дальнейшим расчетом цикла регулирования по зеленому сигналу с выходом на лампы светофорного объекта 19, 20, 21. Расчет цикла регулирования по зеленому сигналу передается на соседние светофорные объекты и через них на другие светофорные объекты. Если время прохождения транспортного потока больше, чем установленное, то с контрольных светофорных объектов 2, 3, 4, 5 поступают корректирующие управляющие сигналы.
Схема обучения нейропрограммы микроЭВМ детектора транспорта 15 представлена на фиг. 5.
Схема функционирования нейропрограммы микроЭВМ детектора транспорта 22 представлена на фиг. 6 и включает в себя:
ввод входной информации с датчиков интенсивности дорожного движения 15, установленных на каждой полосе движения,
функционирование обученной ЭВМ с нейропрограммой детектора транспорта 22, получение интенсивности движения,
передача полученной интенсивности транспортного потока на микроЭВМ с нейропрограммой нейроконтроллера 17.
Схема обучения и доучивания каждого светофорного объекта, связанного информационной сетью с соседними, представлена на фиг. 3 и включат ввод данных с датчиков интенсивности соседних внутренних и контрольных светофорных объектов, осуществление прямого функционирования на основе предварительного обучения и доучивания, вычисления шага обучения, обратного функционирования, модификацию подстроечных параметров. Полученные подстроечные параметры используются для следующего цикла работы программы. Затем приступают к настройке, для этого:
Рассчитывают теоретически возможные и назначают желаемое (контрольное) время прохождения транспортных потоков на основных (приоритетных) направлениях и через данный управляемый район
ΔTi= (Tвыхода-Tвхода), (1)
где ΔTi - контрольное время прохождения транспортного средства на "входах-выходах" района регулирования,
Т выхода - время выхода транспортного средства из района,
Т входа - время входа транспортного средства в район
i - номер основного направления движения.
Для каждого внутреннего светофорного объекта 6, 7, 8, 9 проводят обучение по гибкой схеме на своем перекрестке со ступенчатым набором коэффициентов предпочтений η в магистральных направлениях. На контрольных светофорных объектах по программе вычисляют затраченное время прохождения транспортных потоков по формуле (2)
где  - суммарное время задержки на внутренних светофорных объектах,
- суммарное время задержки на внутренних светофорных объектах,
C - суммарное время прохождения транспортных средств между внутренними светофорными объектами и подхода к контрольным светофорным объектам.
Сравнивают контрольное время с затраченным временем, т.е. (1) и (2), если
т. е. если контрольное время больше или равно затраченному времени, то процесс проходит без изменения. Если условие (3) не выполняется, то производят корректировку процесса за счет увеличения коэффициентов предпочтения на внутренних управляемых светофорных объектах 6, 7, 8, 9 по формуле (4)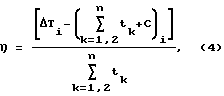
где k - номер внутреннего светофорного объекта.
Таким образом, в нейропрограмме автоматически осуществляют обратную связь и настройку нейросетевого способа межрайонного координированного управления транспортными потоками и самонастройку. При поступающих новых изменениях коэффициента предпочтения с контрольных светофорных объектов 2, 3, 4, 5 внутренние светофорные объекты 6, 7, 8, 9 перестраиваются, выдают новую информацию всем светофорам и в целом вся сеть управляемого района самонастраивается. При обучении нейропрограммы на основе объективных реальных данных в различные периоды суток включены условия изменения работы отдельных светофорных объектов всего района регулирования, настройка, доучивание происходит автоматически и постоянно.
Технико-экономические преимущества
Предлагаемый нейросетевой способ межрайонного координированного управления транспортными потоками обладает следующими достоинствами.
Позволяет оперативно управлять дорожным движением на перекрестке, в районе управления, между районами. Осуществляется двухуровневое управление по предлагаемому способу. Двухуровневое управление позволяет эффективно осуществлять управление более сложными и большими системами, осуществлять гибкое управление.
Эффективным управлением за счет упрощения управления по данному способу. Раннее управление было рассредоточено по всем перекресткам. Предложенный данный нейросетевой способ межрайонного координированного управления транспортными потоками осуществляет управление с центра управления дорожным движением, т.е. с одного места.
ЭВМ с нейропрограммой для каждого светофорного объекта Центра управления дорожным движением находится в стационарных условиях, позволяет обслуживать, осуществлять ремонт дешевле, поддерживается постоянная температура и за счет этого данный способ является более эффективным.
Использование ЭВМ с нейросетью для каждого светофорного объекта позволяет оперативно и быстро учитывать текущую информацию за счет обучения и самообучения нейропрограммы и осуществлять оперативно управление дорожным движением как перекрестка, района и межрайонное управление.
Использование данного способа позволяет обеспечивать устойчивость и надежность в управлении.
Осуществляется мягкое воздействие нейропрограммы на все светофорные объекты.
Литература:
1. Способ управления движением транспортных потоков на перекрестке. Авторское свидетельство N 1399800, М. Кл. 6 G 08 G 1/01.
2. Кременец Ю.А. Технические средства организации дорожного движения, М. , 1990, с. 143.
3. Заявка на изобретение N 97117398. Способ нейросетевого координированного управления транспортными потоками в районе регулирования. Получено решение о выдаче патента от 26 января 1999 года.
4. Введение в искусственные нейронные сети. Анил К. Джейн. Журнал "Открытые системы" нейрокомпьютеры, N 4 (24), 1997 г. с. 16.
5. Барцев С.И., Гилев С.Е., Охонин В.А. Принцип двойственности в организации адаптивных сетей обработки информации. Сборник "Динамика химических и биологических систем" Новосибирск, Наука, 1989 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НЕЙРОСЕТЕВОГО КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМИ ПОТОКАМИ В РАЙОНЕ РЕГУЛИРОВАНИЯ | 1997 |
|
RU2134453C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СВЕТОФОРНЫМ ОБЪЕКТОМ С ЭВМ С НЕЙРОПРОГРАММАМИ | 1998 |
|
RU2151424C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСУЩЕЙ СПОСОБНОСТЬЮ МНОГОПРОЛЕТНОЙ НЕРАЗРЕЗНОЙ БАЛКИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2122188C1 |
| КОНТРОЛЬНО-УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ НАПРЯЖЕННО-ДЕФОРМИРОВАННЫМ СОСТОЯНИЕМ НЕРАЗРЕЗНОЙ БАЛКИ | 1994 |
|
RU2105959C1 |
| Способ координированного управления транспортными потоками | 2015 |
|
RU2613550C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2187437C1 |
| АРОЧНОЕ ПОКРЫТИЕ | 2000 |
|
RU2209275C2 |
| ЛАБОРАТОРНАЯ УСТАНОВКА ПО ТЕРМОДИНАМИКЕ | 2001 |
|
RU2202107C2 |
| ДЕКОРАТИВНОЕ СТЕКЛО | 1995 |
|
RU2098364C1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 1997 |
|
RU2131961C1 |
Изобретение относится к координированному управлению дорожным движением, способам управления транспортными потоками в районах регулирования с использованием нейронных сетей. Технический результат заключается в повышении эффективности межрайонного управления дорожным движением. Способ управления заключается в том, что разделяют весь город на отдельные районы регулирования, на границах которых устанавливают контрольные светофорные объекты с микроЭВМ, связанные с Центром управления дорожным движением, снабженным ЭВМ, связывают контрольные светофорные объекты с внутренними светофорными объектами районов, которые снабжают микроЭВМ, и осуществляют одновременно межрайонное управление контрольными светофорными объектами с Центра управления и управление внутренними светофорными объектами районов с помощью нейропрограмм, которыми снабжают микроЭВМ всех светофорных объектов и ЭВМ Центра управления. 5 ил., 2 табл.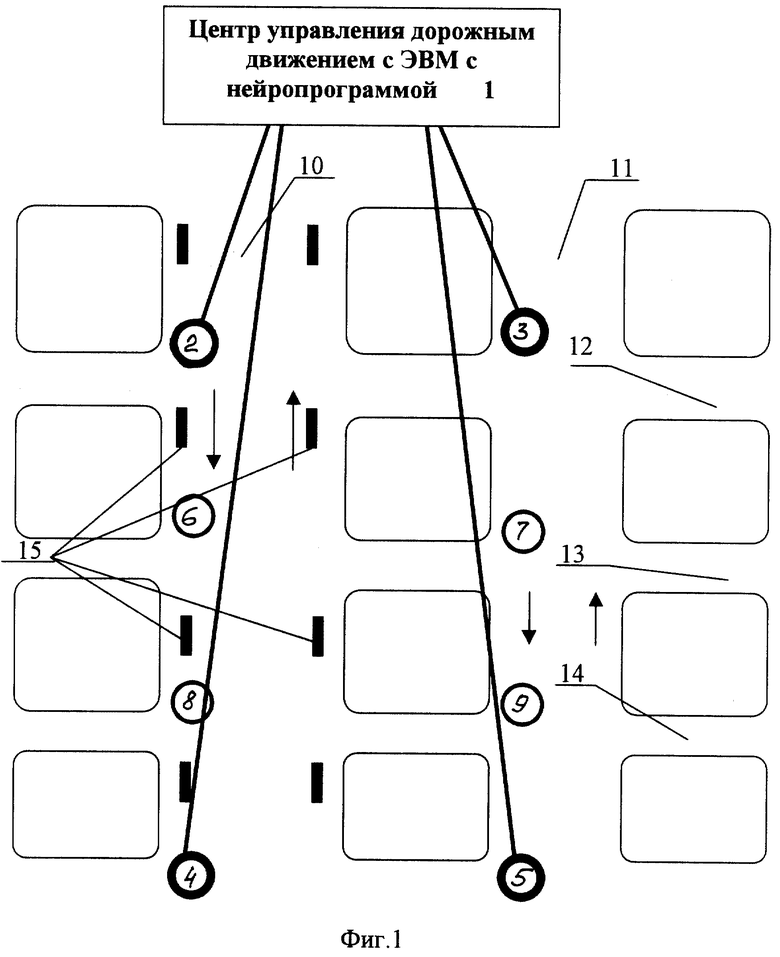
Нейросетевой способ межрайонного координированного управления транспортными потоками, при котором разделяют весь город на отдельные районы регулирования, на границах которых устанавливают контрольные светофорные объекты с микроЭВМ, которые двунаправлено связывают с Центром управления дорожным движением, снабженным ЭВМ, устанавливают связь контрольных светофорных объектов с внутренними светофорными объектами районов регулирования, отличающийся тем, что снабжают микроЭВМ контрольных светофорных объектов и ЭВМ Центра управления дорожным движением нейропрограммами, внутренние светофорные объекты районов регулирования снабжают микроЭВМ с нейропрограммами, связывают все контрольные светофорные объекты информационной сетью между собой и осуществляют одновременно межрайонное управление контрольными светофорными объектами с Центра управления дорожным движением и управление внутренними светофорными объектами каждого района регулирования, для чего измеряют интенсивность транспортных потоков на "входах-выходах" каждого района регулирования, выбирают в результате измерений план координации, наиболее близкий к контрольной совокупности, назначают желаемые показатели по коэффициентам предпочтений на "входах-выходах" района регулирования на контрольных светофорных объектах на основе предварительно измеренных и вычисленных интенсивностей транспортных потоков на "входах-выходах" района регулирования, обучают все связанные информационной сетью светофорные объекты, снабженные микроЭВМ с нейропрограммой, на основе практической выборки задач, учитывающей гибкую смену режимов во времени, резервирование, возможные сбои, аварийные ситуации, различные предпочтения спецтранспорту, сравнивают полученные параметры транспортных потоков с назначенными желаемыми показателями по коэффициентам предпочтений на "входах-выходах" района регулирования, и при наличии существенных отклонений осуществляют обратную связь путем подачи управляющих сигналов по коэффициентам предпочтений на контрольные светофорные объекты районов регулирования, а также с контрольных светофорных объектов на внутренние светофорные объекты каждого района регулирования.
| US 3660812 A, 02.05.1972 | |||
| Способ координированного управления транспортными потоками | 1973 |
|
SU510957A1 |
| Способ управления движением транспортных потоков на перекрестке | 1986 |
|
SU1399800A1 |
| DT 1926921 В2, 28.09.1972 | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| КРЕМЕНЕЦ Ю.А | |||
| Технические средства организации дорожного движения | |||
| - М.: Транспорт, 1990, с | |||
| Крутильная машина для веревок и проч. | 1922 |
|
SU143A1 |
