Изобретение относится к области эксплуатации асинхронных электродвигателей и может быть использовано для определения величины скольжения ротора электродвигателя.
Известен способ определения скольжения ротора асинхронного электродвигателя (Патент РФ №2397505, MПK7 G01R 31/34, 2010 г.), включающий измерение токов статора всех фаз, определение результирующего тока статора, проведение дискретного преобразование Фурье модуля результирующего вектора тока статора и одного из токов статора. Скольжение определяют по полученным значениям основной частотной составляющей fs0 модуля результирующего вектора тока статора в диапазоне частот от 0 до 50 Гц и основной частотной составляющей одного из токов статора с наибольшей амплитудой fc.
Известен способ определения скольжения ротора асинхронного электродвигателя и устройство для его осуществления (Патент РФ №2209442, МПК7 G01R 31/34, 2003 г.), включающий регистрацию мгновенного значения потребляемого тока, его оцифровывание и преобразование Гильберта, определение интегральной амплитуды тока, коэффициента амплитудной модуляции и частоты скольжения ротора.
Недостатками этих способов являются необходимость доступа к цепям питания двигателя и отсутствие информации о достоверности полученных результатов.
В качестве прототипа принят «Способ определения скольжения ротора асинхронного электродвигателя по току статора» (патент на изобретение Российской Федерации №2559162, МПК G01R 31/34, 2015 г.), включающий цифровую регистрацию мгновенной величины амплитуды потребляемого тока, являющегося диагностическим сигналом, во времени на одной из фаз кабеля питания асинхронного электродвигателя, получение с помощью быстрого преобразования Фурье амплитудного спектра зарегистрированного сигнала, определение максимума амплитудного спектра и соответствующую ему частоту, которая близка по значению к частоте сети, определение с помощью метода автокоррекции времени записи сигнала путем его последовательного уменьшения точного значения частоты сети, вычисление по полученному значению частоты сети и числу пар полюсов электродвигателя границы одного диапазона частот для двигателей с одной парой полюсов, либо двух диапазонов для двигателей с числом пар полюсов большим одного на амплитудном спектре, определение на каждом из полученных диапазонов максимума амплитудных спектров и соответствующих им частот, которые близки по значению к частотам гармоник от эксцентриситета ротора (ГЭР) первого порядка, определение с помощью метода автокоррекции времени записи сигнала (АВЗС) путем его последовательного уменьшения точных значений частот гармоник от эксцентриситета ротора первого порядка, по которым получают для двигателей с одной парой полюсов одно значение скольжения, которое является для данных двигателей конечным результатом, а для двигателей с двумя и более парами полюсов два значения скольжения ротора, вычисление скольжения ротора такового асинхронного электродвигателя по среднему арифметическому данных значений.
Недостатками этого способа являются низкая помехозащищенность информативного сигнала из-за низкого соотношения сигнал/шум в исследуемых частотных диапазонах, т.к. обмотка статора является своего рода фильтром для указанных частот, значительно снижает их амплитуды, что затрудняет их обнаружение. А также вероятность возможности получения недостоверных данных из-за отсутствия критерия достоверного получения информации о значении расчетного скольжения.
Техническим результатом предлагаемого изобретения являются повышение помехозащищенности информативного сигнала, так как во внешнем магнитном поле ГЭР более выражены на фоне шума в исследуемых частотных диапазонах, чем в токе статора. А также повышение достоверности полученного значения скольжения для двигателей с числом полюсов более одного за счет наличия критерия достоверного получения информации в разработанном способе.
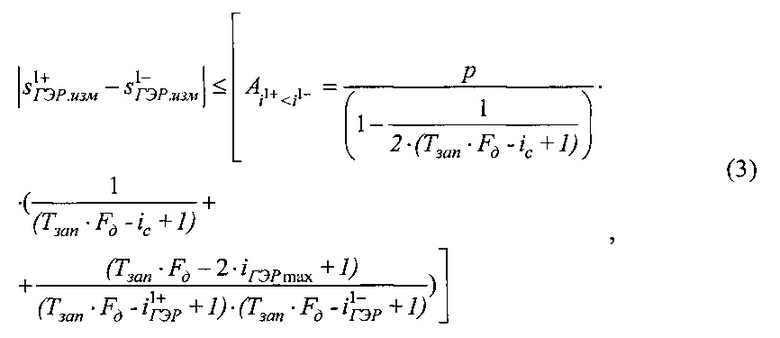
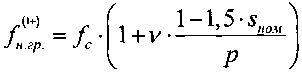
Технический результат достигается тем, что в способе определения скольжения ротора асинхронного электродвигателя производится оценка величины скольжения ротора путем цифровой регистрации мгновенной величины диагностического сигнала, определение с помощью быстрого преобразования Фурье амплитудного спектра зарегистрированного сигнала, определения максимума амплитудного спектра и соответствующую ему частоту, которая близка по значению к частоте сети, определение точного значения частоты сети с помощью метода автокоррекции времени записи сигнала путем его последовательного уменьшения, по полученному значению частоты сети и числу пар полюсов электродвигателя вычисление границы одного диапазона частот для двигателей с одной парой полюсов, либо двух диапазонов для двигателей с числом пар полюсов большим одного на амплитудном спектре, определение на каждом из полученных диапазонов максимумов амплитудных спектров и соответствующих им частот, которые близки по значениям к частотам гармоник эксцентриситета ротора первого порядка, определение с помощью метода автокоррекции времени записи сигнала путем его последовательного уменьшения точных значений частот гармоник эксцентриситета ротора первого порядка, по которым для двигателей с одной парой полюсов получается одно значение скольжения, которое является для данных двигателей конечным результатом, а для двигателей с двумя и более парами полюсов два значения скольжения ротора, скольжение ротора такого асинхронного электродвигателя определяется по среднему арифметическому данных значений, в качестве диагностического сигнала принимается радиальную составляющую напряженности внешнего магнитного поля, регистрацию которой осуществляют датчиком магнитного поля, устанавливаемым на корпусе электродвигателя в зоне середины длины сердечника статора, а для двигателей с числом пар полюсов, более одного, проводится проверка достоверности определения скольжения по выражению:
где  - значение скольжения, рассчитанное по меньшей из двух частот гармоник от эксцентриситета ротора первого порядка;
- значение скольжения, рассчитанное по меньшей из двух частот гармоник от эксцентриситета ротора первого порядка;
 - значение скольжения, рассчитанное по большей из двух частот гармоник от эксцентриситета ротора первого порядка;
- значение скольжения, рассчитанное по большей из двух частот гармоник от эксцентриситета ротора первого порядка;
р - число пар полюсов;
Тзап - время записи сигнала;
 - частота дискретизации;
- частота дискретизации;
ic - количество итераций, произведенных алгоритмом по методу автокоррекции времени записи сигнала при определении частоты сети;
 - количество итераций, произведенных алгоритмом по методу автокоррекции времени записи сигнала при определении большей из двух частот ГЭР 1-го порядка
- количество итераций, произведенных алгоритмом по методу автокоррекции времени записи сигнала при определении большей из двух частот ГЭР 1-го порядка  ;
;
 - количество итераций, произведенных алгоритмом по методу автокоррекции времени записи сигнала при определении меньшей из двух частот ГЭР 1-го порядка
- количество итераций, произведенных алгоритмом по методу автокоррекции времени записи сигнала при определении меньшей из двух частот ГЭР 1-го порядка  ;
;
iГЭРmax принимают равным  , если
, если  ,
,
или принимают равным  , если
, если  .
.
Перечень графических иллюстраций:
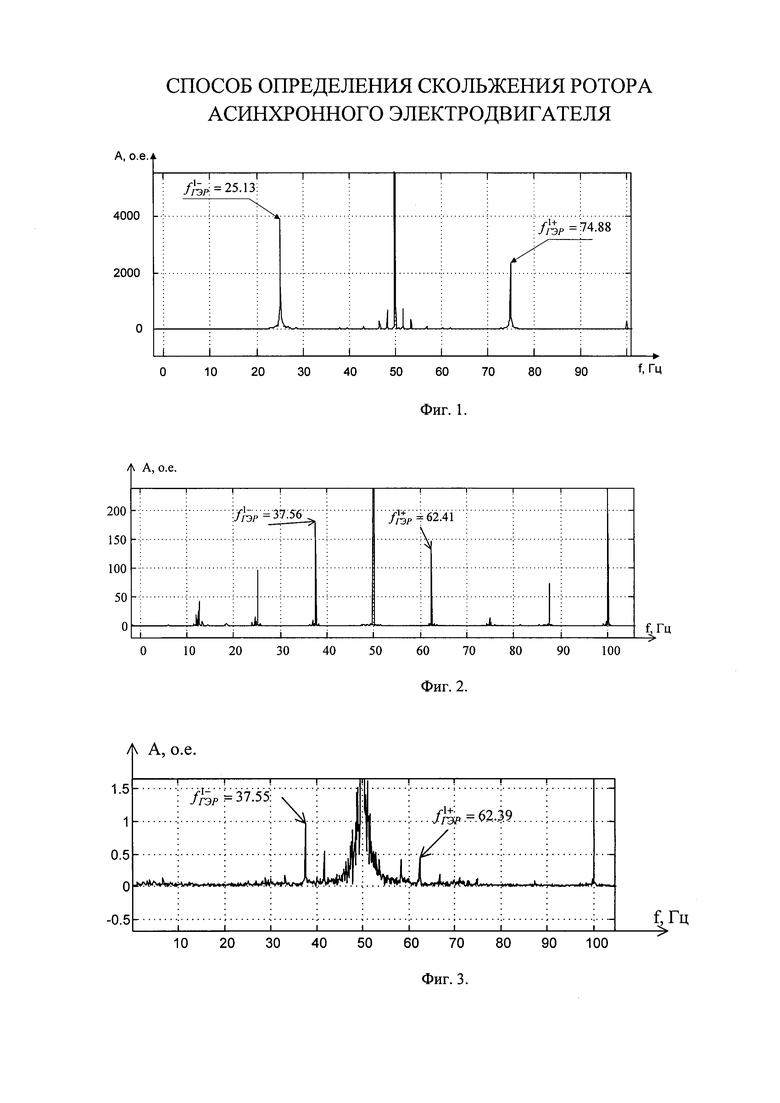
Фиг. 1. Амплитудный спектр внешнего магнитного поля для низковольтного асинхронного двигателя 4AM100S4CY1;
Фиг. 2. Амплитудный спектр внешнего магнитного поля для высоковольтного асинхронного двигателя ДАМСО-15-12-8;
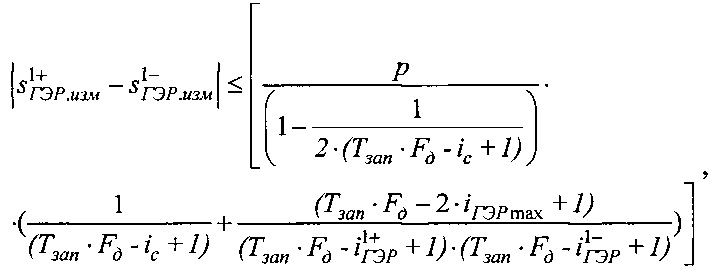
Фиг. 3. Амплитудный спектр тока статора для высоковольтного асинхронного двигателя ДАМСО-15-12-8.
Сущность способа заключается в следующем.
Известно, что магнитное поле в воздушном зазоре асинхронного двигателя изменяется не строго по синусоидальному закону. Поэтому ток статора и внешнее магнитное поле также будут изменяться по несинусоидальному закону. Таким образом, при разложении в ряд Фурье сигнала тока или внешнего магнитного поля в нем обнаруживаются гармоники, имеющие частоту, отличную от частоты питающей сети. Следует отметить, что амплитуды этих гармоник относительно амплитуды основной гармоники для внешнего магнитного поля существенно превышают амплитуды соответствующих гармоник для тока статора, как это видно при сравнении фиг. 2 и фиг. 3.
В предлагаемом способе определение скольжения асинхронного электродвигателя осуществляют путем регистрации мгновенной величины радиальной составляющей напряженности внешнего магнитного поля во времени посредством датчика магнитного поля (например, датчика Холла), который устанавливают на корпусе в зоне середины длины сердечника статора для компенсации аксиальной составляющей магнитного поля.
Зарегистрированный сигнал кроме основной гармоники также содержит ГЭР первого порядка, частоты которых зависят от параметров двигателя и могут быть определены по следующему выражению:

где  - плюсовая и минусовая частоты ГЭР первого порядка соответственно.
- плюсовая и минусовая частоты ГЭР первого порядка соответственно.
Выражения для определения скольжения электродвигателя приведены в описании к патенту на изобретение Российской Федерации №2559162.
Для проверки достоверности полученных результатов для двигателей с числом пар полюсов не менее двух на основании методической погрешности было выведено следующее условие определения достоверности полученного результата:
Абсолютные погрешности определения частоты сети и максимальной частоты первой гармоники динамического эксцентриситета с применением метода АВЗС определяются по формулам

где - частота дискретизации;
 - точное значение частот ГЭР 1-го порядка;
- точное значение частот ГЭР 1-го порядка;
 - точное значение частоты сети.
- точное значение частоты сети.
Для определения максимальной погрешности необходимо рассмотреть все варианты сочетания знаков в выражениях для расчета значений скольжения по гармоникам эксцентриситета ротора первого порядка  и
и  . Получив значения погрешности определения скольжения по гармоникам эксцентриситета ротора по ГЭР первого порядка, определяют максимально возможную погрешность как сумму значений
. Получив значения погрешности определения скольжения по гармоникам эксцентриситета ротора по ГЭР первого порядка, определяют максимально возможную погрешность как сумму значений  и
и  . Далее из выражения максимальной погрешности удаляют точные значений частот динамического эксцентриситета ротора и сети. После математических преобразований было получено следующее выражение для оценки достоверности результатов расчета скольжения по гармоникам эксцентриситета ротора:
. Далее из выражения максимальной погрешности удаляют точные значений частот динамического эксцентриситета ротора и сети. После математических преобразований было получено следующее выражение для оценки достоверности результатов расчета скольжения по гармоникам эксцентриситета ротора:
Таким образом, заявленный способ позволяет определять значение скольжения по ГЭР первого порядка, присутствующими во внешнем магнитном поле, и производить проверку правильного определения скольжения для двигателей с числом полюсов два и более.
Способ реализуется следующим образом:
- посредством внешнего датчика магнитного поля (например, датчика Холла), установленного на корпусе электродвигателя в зоне середины длины сердечника статора, осуществляют запись сигнала радиальной составляющей напряженности внешнего магнитного поля.
- сигнал оцифровывают, затем формируют вектор амплитудного спектра, по максимуму амплитуды радиальной составляющей напряженности внешнего магнитного поля определяют частоту сети;
- формируют диапазоны частот гармоник эксцентриситета ротора, границы которых определяются при значениях скольжений s=0 и s=1,5sном, где sном - номинальное скольжение электродвигателя, 1,5sном - максимальное значение скольжения с учетом перегрузки и допустимого отклонения скольжения от номинального при номинальной нагрузке машины.
Первый диапазон:
 , где
, где  - частота, соответствующая верхней границе первого диапазона;
- частота, соответствующая верхней границе первого диапазона;
 , где
, где  - частота, соответствующая нижней границе первого диапазона.
- частота, соответствующая нижней границе первого диапазона.
Второй диапазон:
 , где
, где  - частота, соответствующая верхней границе второго диапазона;
- частота, соответствующая верхней границе второго диапазона;
 , где
, где  - частота, соответствующая нижней границе второго диапазона;
- частота, соответствующая нижней границе второго диапазона;
- в данных диапазонах находят частоты, обусловленные ГЭР первого порядка, имеющие наибольшую амплитуду. Если двигатель имеет две и более пары полюсов, то в гармонике от эксцентриситета ротора первого порядка будут присутствовать две частоты, если одну пару, то будет присутствовать только одна частота.
Для двигателей с двумя и более парами полюсов по двум частотам ГЭР первого порядка осуществляют расчет величины скольжения ротора асинхронного электродвигателя с последующим осреднением результата.
Полученные значения скольжения проверяются по критерию (3) для проверки достоверности определения скольжения. Если данные критерии выполняются, полученный результат можно считать правильным, иначе требуется провести дополнительные измерения.
Для двигателей с одной парой полюсов расчетное значение скольжения определяют по одной частоте ГЭР первого порядка. Проверка достоверности полученного значения скольжения не производится.
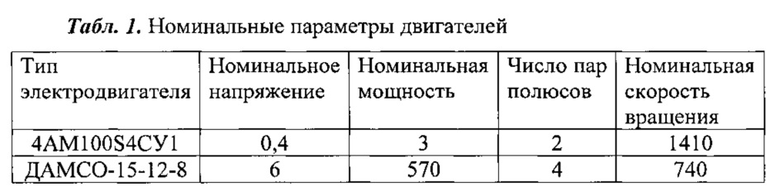
Способ определения величины скольжения ротора асинхронного электродвигателя был реализован на базе персонального компьютера и опробован на двух асинхронных электродвигателях электрической станции (высоковольтном и низковольтном). Паспортные данные двигателей приведены в табл.1.
Пример 1. Определение скольжения ротора асинхронного электродвигателя на низковольтном асинхронном двигателе 4AM100S4CY1.
Запись сигнала осуществлялась с помощью датчика магнитного поля, расположенного на корпусе электродвигателя в зоне середины длины сердечника статора. Сигнал оцифровывается с помощью аналого-цифрового преобразователя (АЦП). Частота вращения вала ротора электродвигателя определялась с помощью оптического тахометра АТ-8. Погрешность его измерений составляет 0,05%. Частота дискретизации АЦП 10 кГц. Продолжительность времени записи сигнала составляла 10 с.
В ходе исследования на низковольтном двигателе было проведено определение скольжения двумя способами:
1. В первом способе (эталонном способе) определялось значение скольжения, принимаемое за точное (эталонное). С помощью оптического тахометра определялось значение частоты вращения ротора, а с помощью частотометра - значение частоты питающей сети.
2. Второй способ {заявленный способ) позволяет определить скольжение по значению ГЭР первого порядка, которое рассчитывается по выражению (1), и частоты питающей сети, присутствующими во внешнем магнитном поле. Это разрабатываемый способ. Так как двигатель имеет две пары полюсов, то в этом случае производится проверка достоверности результатов измерения по критерию (3).
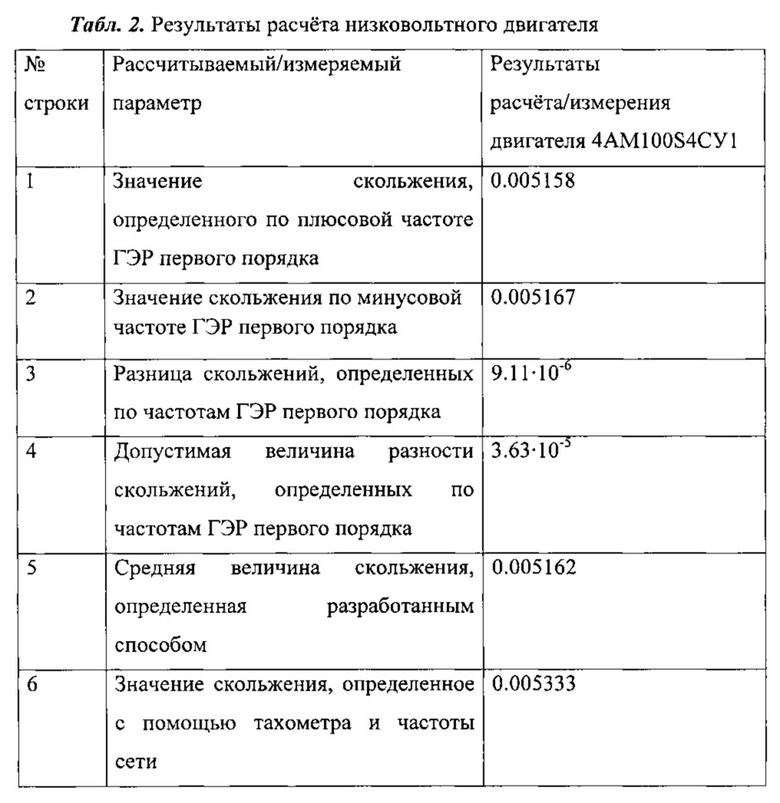
Результаты испытаний приведены в табл. 2. Спектр радиальной составляющей напряженности внешнего магнитного поля этого двигателя приведен на фиг. 1. Видно, что результаты расчета разработанным способом с высокой точностью совпали с результатами, полученными эталонным способом. Кроме того, критерии подтвердили правильность полученного результата. Таким образом, полученные результаты подтвердили эффективность данного способа для определения скольжения низковольтных асинхронных двигателей.
Примечание: разница между значениями скольжения, определенного заявленным способом (табл. 2, строка №5), и скольжения, определенного с помощью тахометра и частоты сети (табл. 2, строка №6), вызвана погрешностью тахометра, так как сравнение величин, указанных в строках №3 и №4 табл. 2, доказывает высокую достоверность определения скольжения заявленным способом.
Пример 2. Определение скольжения ротора асинхронного электродвигателя на высоковольтном асинхронном двигателе ДАМСО-15-12-8.
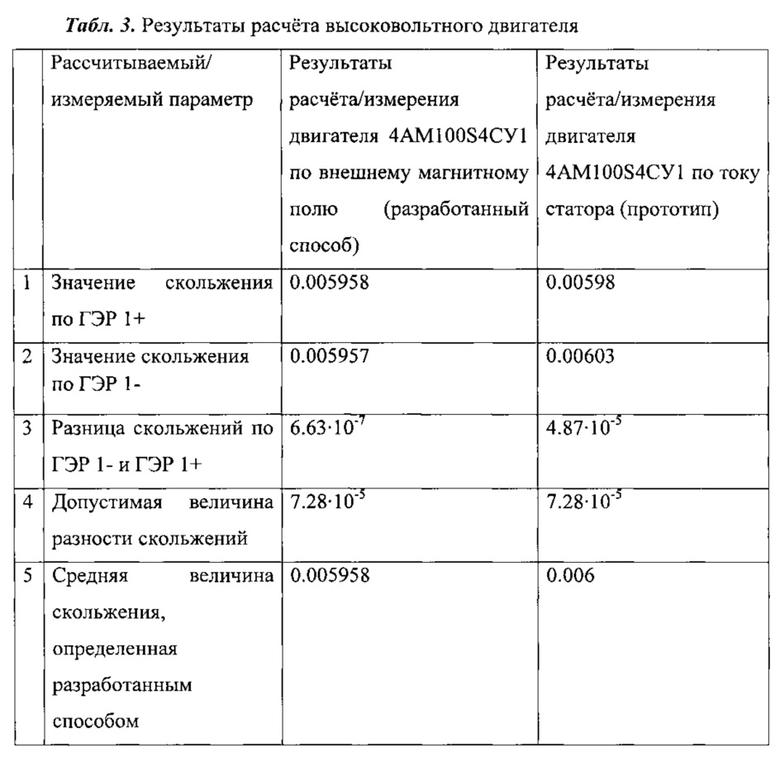
В отличие от вышеописанного случая, на высоковольтном двигателе скорость вращения вала с помощью тахометра не определялась. Поэтому достоверность полученных данных была определена по критерию 3. Результаты испытаний приведены в табл. 3. Критерии подтвердили правильность полученного результата. Также достоверность определения скольжения подтверждает то, что результаты расчета, полученные для того же двигателя при измерении скольжения по току статора, близки с результатами расчета предложенным способом. Амплитудные спектры внешнего магнитного поля этого двигателя приведены на фиг. 2, а тока статора этого же двигателя - на фиг. 3. Сравнивая амплитудные спектры тока статора и внешнего магнитного поля можно отметить, что на рассматриваемых диапазонах частот, где определялись частоты ГЭР первого порядка, соотношение амплитуды минимальной из ГЭР и шума для внешнего магнитного поля составляет приблизительно 50, а для тока статора - около 10. Это подтверждает то, что ГЭР лучше проявляются при анализе внешнего поля, чем тока статора, что является важным преимуществом предложенного способа.
Таким образом, полученные результаты подтвердили эффективность данного способа для определения скольжения высоковольтных асинхронных двигателей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ОБРЫВОВ СТЕРЖНЕЙ КОРОТКОЗАМКНУТЫХ ОБМОТОК РОТОРОВ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2017 |
|
RU2650821C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ ПО ТОКУ СТАТОРА | 2014 |
|
RU2559162C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ОБОРВАННЫХ СТЕРЖНЕЙ В КОРОТКОЗАМКНУТОЙ ОБМОТКЕ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2018 |
|
RU2687881C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ОБРЫВОВ СТЕРЖНЕЙ КОРОТКОЗАМКНУТОЙ ОБМОТКИ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И ИХ КОЛИЧЕСТВА | 2017 |
|
RU2654972C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ПОВЫШЕННОГО ЭКСЦЕНТРИСИТЕТА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2024 |
|
RU2823095C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2010 |
|
RU2441249C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ОБОРВАННЫХ СТЕРЖНЕЙ В КОРОТКОЗАМКНУТОЙ ОБМОТКЕ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2022 |
|
RU2791428C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ОБОРВАННЫХ СТЕРЖНЕЙ В КОРОТКОЗАМКНУТОЙ ОБМОТКЕ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2019 |
|
RU2724988C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ОБОРВАННЫХ СТЕРЖНЕЙ В КОРОТКОЗАМКНУТОЙ ОБМОТКЕ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2022 |
|
RU2786379C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2209442C2 |
Изобретение относится к области эксплуатации асинхронных электродвигателей и может быть использовано для определения величины скольжения ротора электродвигателя. Сущность изобретения заключается в том, что способ определения скольжения ротора асинхронного электродвигателя содержит этап, на котором в качестве диагностического сигнала принимают радиальную составляющую напряженности внешнего магнитного поля, регистрацию которой осуществляют датчиком магнитного поля, устанавливаемым на корпусе электродвигателя в зоне середины длины сердечника статора, а для двигателей с числом пар полюсов более одного проводят проверку достоверности определения скольжения по соответствующему приведенному выражению. Технический результат – повышение помехозащищенности информативного сигнала и повышение достоверности полученного значения скольжения для двигателей с числом полюсов более одного. 3 ил., 3 табл.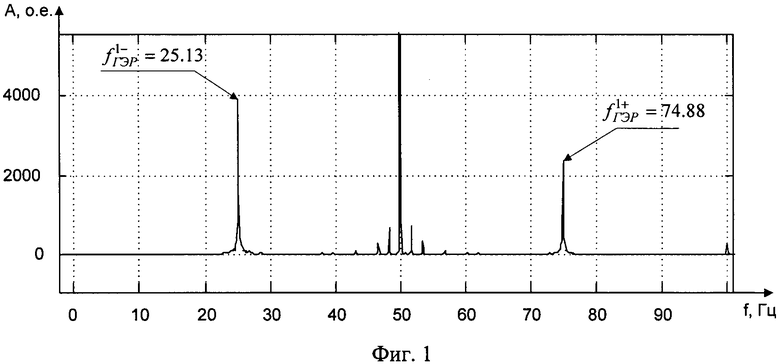
Способ определения скольжения ротора асинхронного электродвигателя, включающий цифровую регистрацию диагностического сигнала во времени, получение с помощью быстрого преобразования Фурье амплитудного спектра зарегистрированного сигнала, определение максимума амплитудного спектра и соответствующей ему частоты, которая близка по значению к частоте сети, определение с помощью метода автокоррекции времени записи сигнала путем его последовательного уменьшения точного значения частоты сети, вычисление по полученному значению частоты сети и числу пар полюсов электродвигателя границы одного диапазона частот для двигателей с одной парой полюсов, либо двух диапазонов для двигателей с числом пар полюсов большим одного на амплитудном спектре, определение на каждом из полученных диапазонов максимума амплитудных спектров и соответствующих им частот, которые близки по значению к частотам гармоник от эксцентриситета ротора первого порядка, определение с помощью метода автокоррекции времени записи сигнала путем его последовательного уменьшения точных значений частот гармоник от эксцентриситета ротора первого порядка, по которым получают для двигателей с одной парой полюсов одно значение скольжения, которое является для данных двигателей конечным результатом, а для двигателей с двумя и более парами полюсов два значения скольжения ротора, вычисления скольжения ротора такового асинхронного электродвигателя по среднему арифметическому данных значений, отличающийся тем, что в качестве диагностического сигнала принимают радиальную составляющую напряженности внешнего магнитного поля, регистрацию которой осуществляют датчиком магнитного поля, устанавливаемым на корпусе электродвигателя в зоне середины длины сердечника статора, а для двигателей с числом пар полюсов более одного проводят проверку достоверности определения скольжения по выражению:
где  - значение скольжения, рассчитанное по меньшей из двух частот гармоник от эксцентриситета ротора первого порядка;
- значение скольжения, рассчитанное по меньшей из двух частот гармоник от эксцентриситета ротора первого порядка;
 - значение скольжения, рассчитанное по большей из двух частот гармоник от эксцентриситета ротора первого порядка;
- значение скольжения, рассчитанное по большей из двух частот гармоник от эксцентриситета ротора первого порядка;
р - число пар полюсов;
Тзап - время записи сигнала;
Fд - частота дискретизации;
ic - количество итераций, произведенных алгоритмом по методу автокоррекции времени записи сигнала при определении частоты сети;
 - количество итераций, произведенных алгоритмом по методу автокоррекции времени записи сигнала при определении большей из двух частот гармоник от эксцентриситета ротора первого порядка;
- количество итераций, произведенных алгоритмом по методу автокоррекции времени записи сигнала при определении большей из двух частот гармоник от эксцентриситета ротора первого порядка;
 - количество итераций, произведенных алгоритмом по методу автокоррекции времени записи сигнала при определении меньшей из двух частот гармоник от эксцентриситета ротора первого порядка;
- количество итераций, произведенных алгоритмом по методу автокоррекции времени записи сигнала при определении меньшей из двух частот гармоник от эксцентриситета ротора первого порядка;
iГЭРmах принимают равным  , если
, если 
или iГЭРmах принимают равным  , если
, если 
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ ПО ТОКУ СТАТОРА | 2014 |
|
RU2559162C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2009 |
|
RU2397505C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ С ФАЗНЫМ РОТОРОМ | 2009 |
|
RU2390036C1 |
| CN 102914741 B, 18.02.2015 | |||
| Способ лечения тромбопенической пурпуры, эссенциальной тромбопении и геморрагических диатезов | 1955 |
|
SU101773A1 |

