Предлагаемое изобретение относится к системам ориентации, навигации и управления подвижных объектов (ПО) - летательных аппаратов, самолетов, кораблей и др. - и предназначено для определения двух компонентов вектора абсолютной угловой скорости. Прибор может быть выполнен в микромеханическом варианте.
Известен гидродинамический гироскоп по книге [К.П. Андрейченко "Динамика поплавковых гироскопов и акселерометров", М.: Машиностроение, 1987. - 128 с.]. Этот гироскоп содержит камеру в опорах вращения, внутренняя полость которой частично заполнена жидкостью, а в ней помещен ротор-поплавок с нулевой плавучестью, который имеет возможность измерять два компонента углового движения ПО. Недостатком его является наличие уводящих моментов, отсутствие осевого центрирования и достаточно сложные конструкция и технология изготовления прибора.
Известен гидродинамический гироскоп по патенту РФ №2116623, МПК G01C 19/20 1998 г., содержащий камеру с опорами, вращающуюся от внешнего электродвигателя, со сферической полостью, частично заполненной жидкостью, в которой размещен ротор-поплавок с нулевой остаточной плавучестью. Он предназначен для измерения двух компонентов углового движения ПО. Недостатком прибора является сложность конструкции и изготовления, отсутствие осевого центрирования ротора и невозможность создания на его основе микрогироскопа.
Известен гидродинамический гироскоп по книге [Д.П. Лукьянов, В.Я. Распопов, Ю.В. Филатов: Прикладная теория гироскопов. - СПб.: ГНЦ РФ ОАО "Концерн "ЦНИИ "Электроприбор", 2015. - 316 с.]. Он имеет твердый ротор - поплавок, размещенный в сферической полости корпуса, принудительно вращаемого в опорах вокруг оси, совпадающей с полярной осью ротора. Свободный объем между ротором и вращаемым корпусом заполнен жидкостью не полностью, и при вращении вблизи оси остается цилиндрическое газовое пространство. При вращении корпуса ротор - поплавок в радиальном направлении центрируется гидродинамическими силами. Устройство осевого центрирования состоит из шарика, жестко связанного с ротором, и двух игольчатых осевых упоров. Прибор измеряет две составляющие вектора абсолютной скорости ПО. Недостатком прибора является сложность конструкции и технологии его изготовления, в том числе из-за осевого центрирования ротора, и невозможность создания на его основе микрогироскопа.
Известны микромеханические гироскопы, которые сложны в изготовлении и эксплуатации.
Наиболее близким прибором, принятым за прототип, является гидродинамический гироскоп по патенту РФ (ПМ) №197374, 2019 г., в состав которого входят корпус, полый герметичный ротор, между ротором и корпусом частично залита жидкость, датчики съема угловой информации, электродвигатель привода ротора, при этом герметичный корпус закреплен на подвижном объекте, на роторе-поплавке цилиндрической формы помещен в центральной части электроизолированный, например, помедненный тонкостенный цилиндр, являющийся активной частью асинхронного электродвигателя, напротив него в центральной внутренней части корпуса помещен магнитопровод с обмотками статора электродвигателя привода ротора, с левого и правого торцов ротора нанесены круглые электроизолированные пластины торцевых подвижных электродов, на внутренней части корпуса напротив них размещены два разрезанных по диаметру электрода для осевого центрирования ротора-поплавка, с левого и правого цилиндрических сторон ротора расположены разрезные электроды с двумя диаметральными осевыми, направленными вдоль образующей прорезями, в свою очередь, против кольцевых подвижных разрезных силовых электродов расположены по двум окружностям электроизолированные пластины, составляющие по четыре пары неподвижных электродов межосевой радиальной коррекции, электроды расположены через 90 угловых градусов по окружностям, причем рядом между собой размещены два измерительных, а затем - два силовых электрода, и они строго соответствуют друг другу по четырем образующим цилиндра, при этом одноименные измерительные электроды, расположенные по одной окружности, соединены с соседними силовыми электродами этой же окружности через посредство последовательно соединенных двух блоков линеаризации нелинейностей в составе бортового контроллера, а также усилителя мощности, образуя четыре силовые цепочки, составляющие два контура радиальной коррекции по углам α и β, жидкость заполняет не менее  части внутренней полости прибора, торцевые разрезные электроды подключены параллельно к источнику сверхвысокочастотного напряжения,, к другим источникам сверхвысокочастотного напряжения подключены восемь электродов радиальной коррекции, статор электродвигателя соединен с источником трехфазного переменного напряжения для привода во вращение ротора, по четыре пары левых и правых неподвижных силовых электродов соединены через блок электроники с измерительными электродами, образующими датчики углов α и β используемые в контроллере для определения выходных сигналов по угловым скоростям ωх, ωу, вторые выходы измерительных электродов предназначены за счет зазоров на активной части ротора электродвигатели для определения частоты вращения ротора и управления ею с помощью блока электроники.
части внутренней полости прибора, торцевые разрезные электроды подключены параллельно к источнику сверхвысокочастотного напряжения,, к другим источникам сверхвысокочастотного напряжения подключены восемь электродов радиальной коррекции, статор электродвигателя соединен с источником трехфазного переменного напряжения для привода во вращение ротора, по четыре пары левых и правых неподвижных силовых электродов соединены через блок электроники с измерительными электродами, образующими датчики углов α и β используемые в контроллере для определения выходных сигналов по угловым скоростям ωх, ωу, вторые выходы измерительных электродов предназначены за счет зазоров на активной части ротора электродвигатели для определения частоты вращения ротора и управления ею с помощью блока электроники.
К недостаткам прототипа можно отнести значительные массо-габаритные параметры прибора, высокую сложность и трудоемкость при миниатюрном исполнении.
Целью настоящего изобретения является существенное устранение отмеченных недостатков и в том числе - обеспечение возможности создания микрогироскопа.
Техническим результатом изобретения является создание конструкции без гидростатического взвешивания ротора, снижение усилий, создаваемых межосевой радиальной коррекцией в приборе и уменьшение массо-габаритных размеров за счет обеспечения непосредственного привода ротора от асинхронного двигателя, применение электростатического съема сигнала по двум углам, а также применение межосевой радиальной коррекции путем соединения через усилители и микроконтроллер указанных датчиков с электростатическими датчиками силы и использование в качестве опор ротора бесконтактных магнитных подшипников на пассивном магнитном подвесе.
Поставленная задача решается тем, что гидродинамический гироскоп, в состав которого входят корпус, полый герметичный ротор, между ротором и корпусом частично залита жидкость, датчики съема угловой информации, электродвигатель привода ротора, при этом герметичный корпус закреплен на подвижном объекте, на роторе цилиндрической формы помещен в центральной части электроизолированный, например, помедненный тонкостенный цилиндр, являющийся активной частью асинхронного электродвигателя, напротив него в центральной внутренней части корпуса помещен магнитопровод с обмотками статора электродвигателя привода ротора, с левого и правого торцов ротора нанесены круглые электроизолированные пластины торцевых подвижных электродов, на внутренней части корпуса напротив них размещены два разрезанных по диаметру электрода для осевого центрирования ротора, с левого и правого цилиндрических сторон ротора расположены разрезные электроды с двумя диаметральными осевыми, направленными вдоль образующей прорезями, в свою очередь, против кольцевых подвижных разрезных силовых электродов расположены по двум окружностям электроизолированные пластины, составляющие по четыре пары неподвижных электродов межосевой радиальной коррекции, электроды расположены через 90 угловых градусов по окружностям, причем рядом между собой размещены два измерительных, а затем - два силовых электрода, и они строго соответствуют друг другу по четырем образующим цилиндра, при этом одноименные измерительные электроды, расположенные по одной окружности, соединены с соседними силовыми электродами этой же окружности через посредство последовательно соединенных двух блоков линеаризации нелинейностей в составе бортового контроллера, а также усилителя мощности, образуя четыре силовые цепочки, составляющие два контура радиальной коррекции по углам α и β, торцевые разрезные электроды подключены параллельно к источнику сверхвысокочастотного напряжения, к другим источникам сверхвысокочастотного напряжения подключены восемь электродов радиальной коррекции, статор электродвигателя соединен с источником трехфазного переменного напряжения для привода во вращение ротора, по четыре пары левых и правых неподвижных силовых электродов соединены через блок электроники с измерительными электродами, образующими датчики углов α и β, используемые в контроллере для определения выходных сигналов по угловым скоростям ωх, ωу, вторые выходы измерительных электродов предназначены за счет зазоров на активной части ротора электродвигатели для определения частоты вращения ротора и управления ею с помощью блока электроники, отличающийся тем, что между ротором и корпусом отсутствует жидкость, а в полом герметичном роторе соосно оси вращения размещена цилиндрическая герметичная камера, заполненная вязкой тяжелой жидкостью, при этом на внутреннюю поверхность цилиндрической камеры нанесен псевдорегулярный микрорельеф, а в качестве опор ротора используются бесконтактные магнитные подшипники на пассивном магнитном подвесе.
Устройство и работа прибора поясняются схемами и чертежами, представленными на фиг. 1-9:
Фиг. 1 - Общий вид прибора.
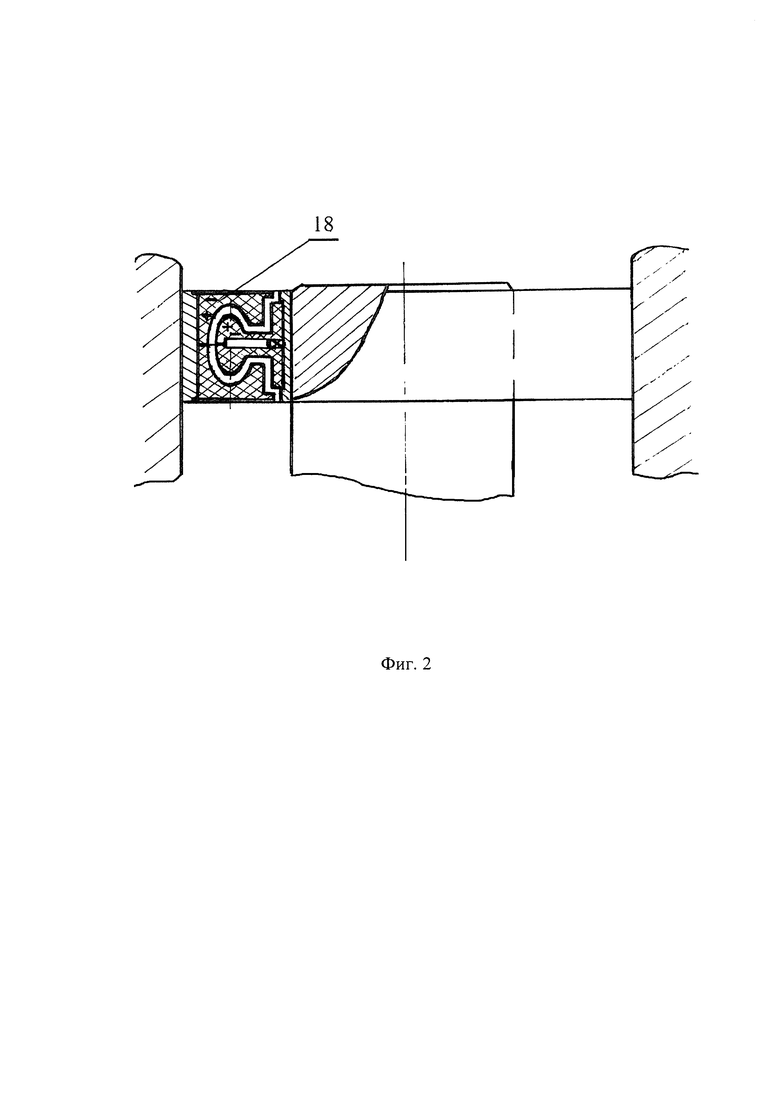
Фиг. 2 - Вид по стрелке А.
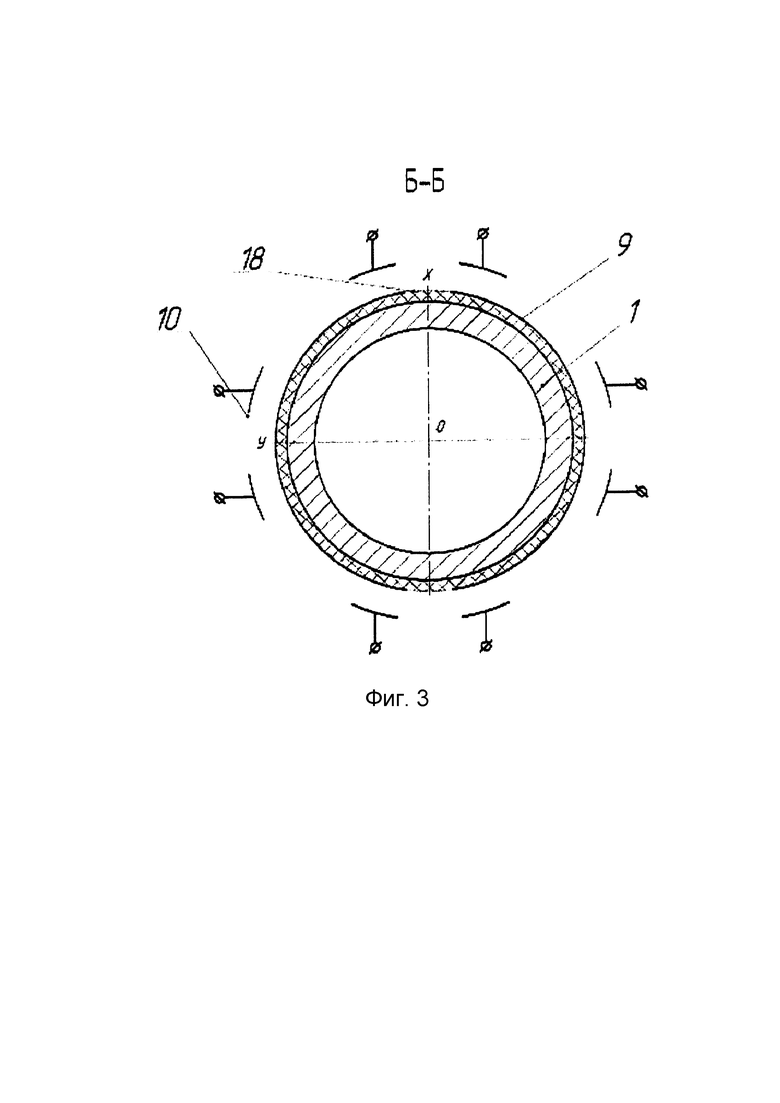
Фиг. 3 - Вид по стрелке Б.
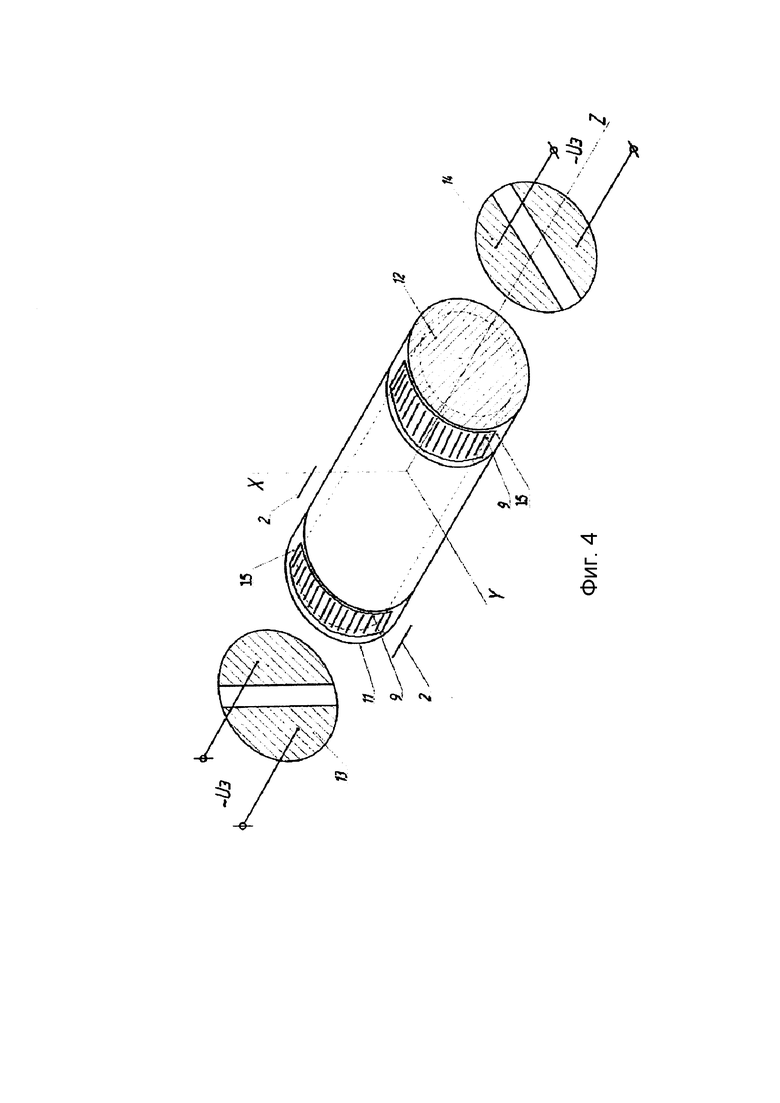
Фиг. 4 - Кинематическая схема.
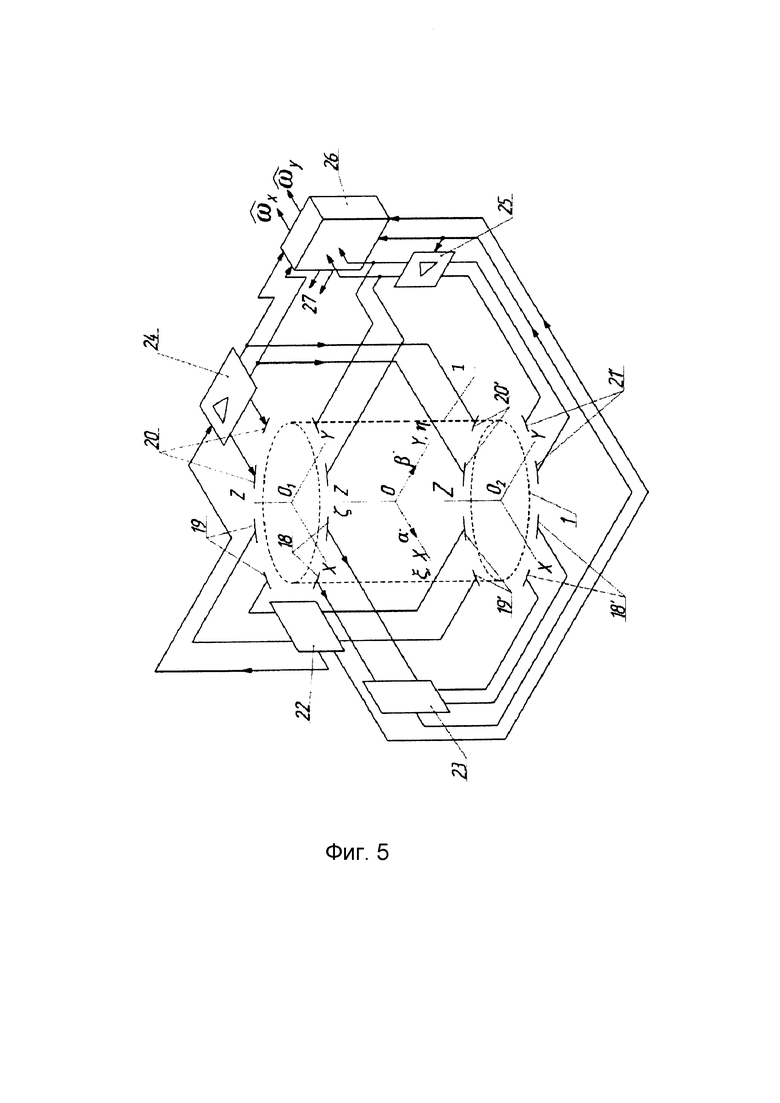
Фиг. 5 - Электрокинематическая схема с соединениями электродов и блока электроники.
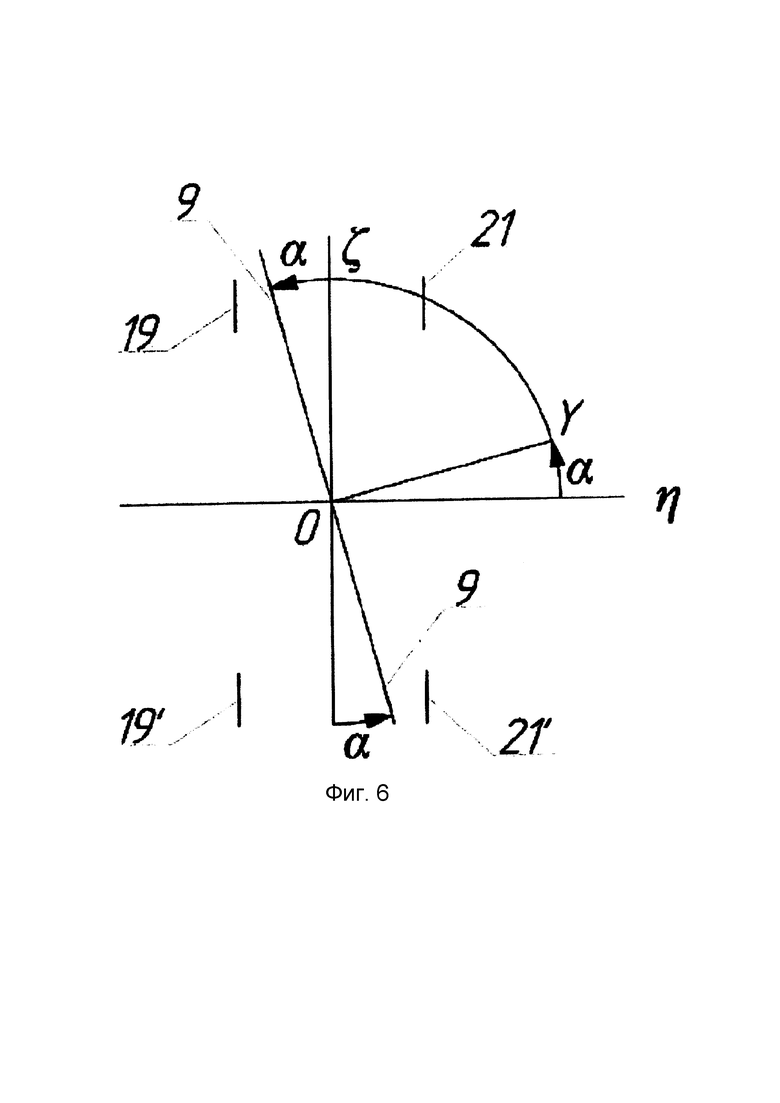
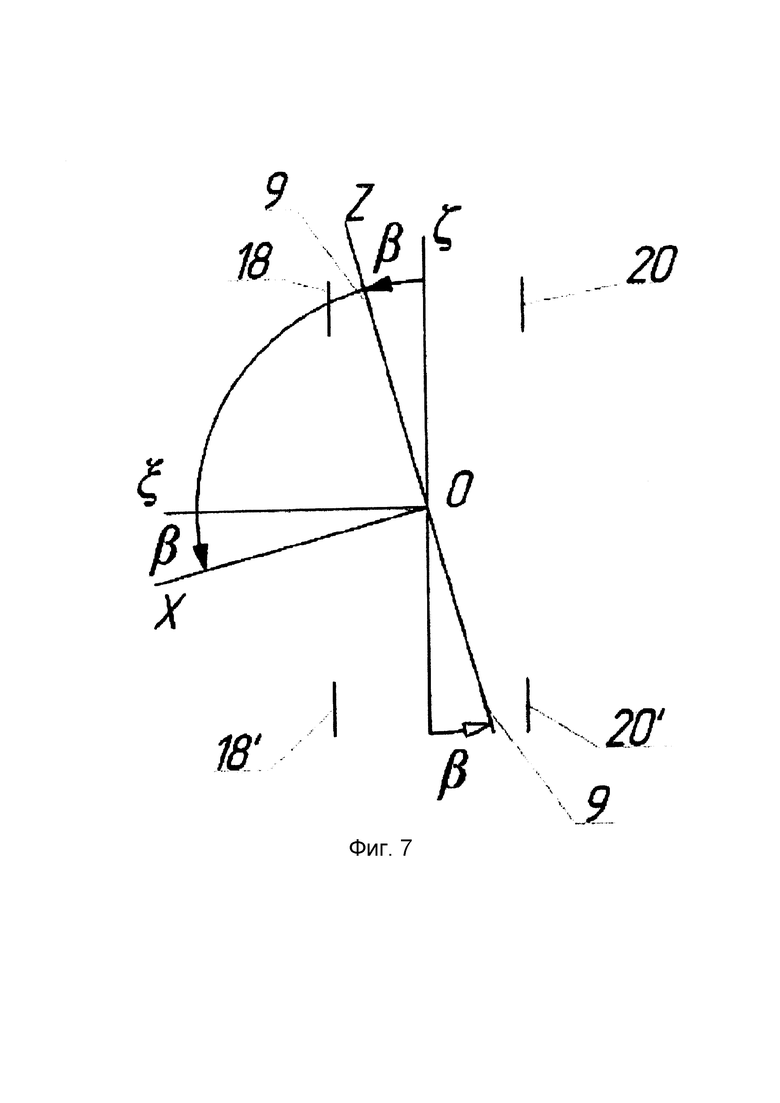
Фиг. 6, 7 - схемы поворотов электродов.
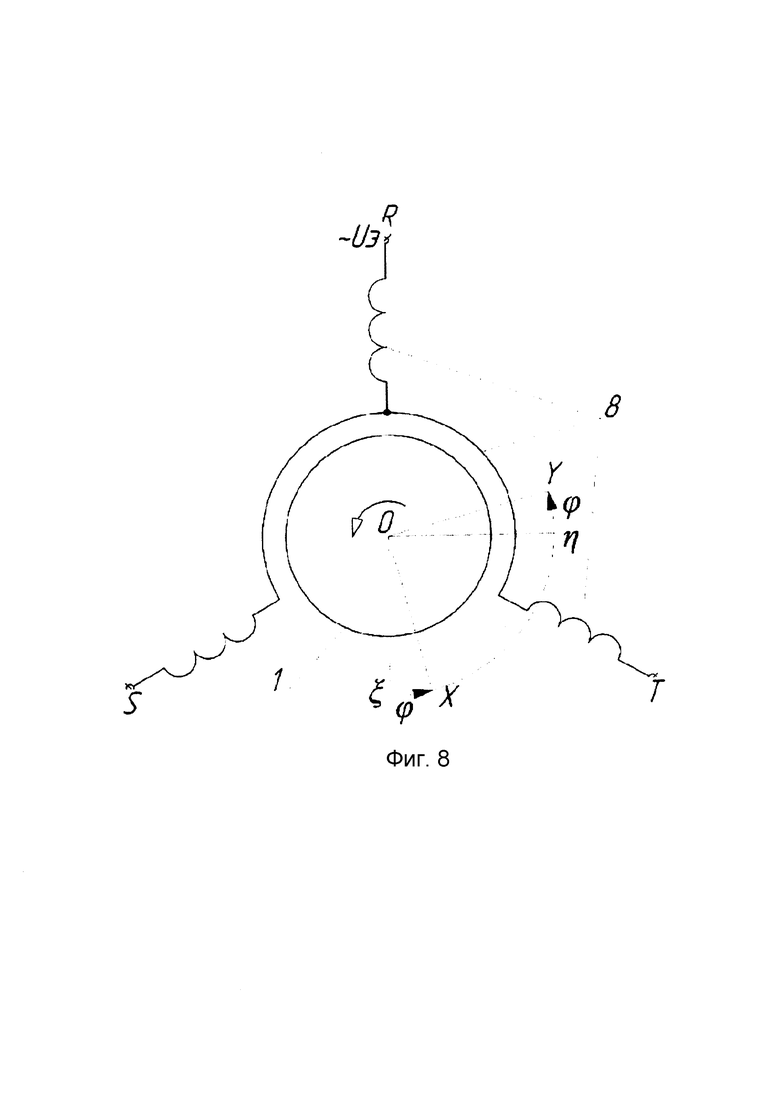
Фиг. 8 - Схема электрическая асинхронного электродвигателя.
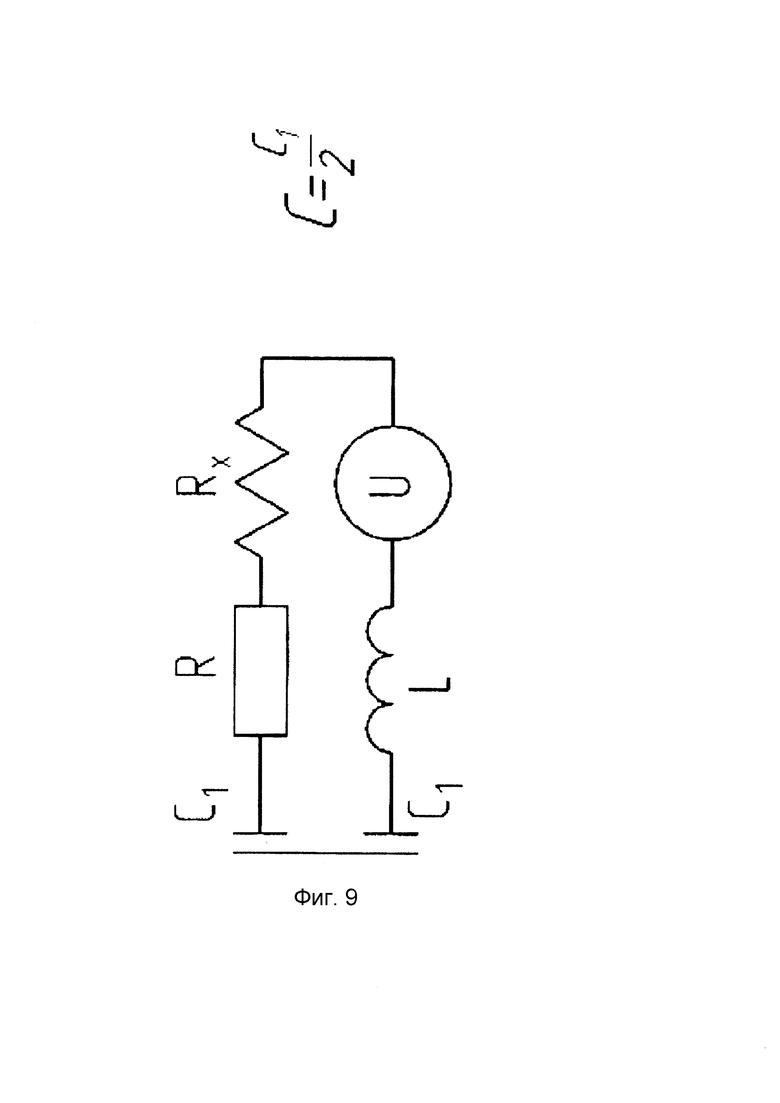
Фиг. 9 - Схема электрическая измерительной цепочки.
На фиг. 1-9 приняты следующие обозначения:
1 - ротор;
2 - корпус неподвижный;
3 - посадочный фланец с отверстием для установки на корпусе;
4 - юстировочная прорезь;
5 - крышка;
6 - тяжелая вязкая жидкость;
7 - активная (например, покрытая слоем меди) часть ротора асинхронного электродвигателя привода ротора;
8 - статор асинхронного электродвигателя;
9 - кольцевые разрезные электроды датчиков сил и перемещений радиальной коррекции гироскопа, расположенные на роторе;
10 - электроды датчиков сил и перемещений радиальной коррекции, расположенные на корпусе и образующие статоры датчиков сил и перемещений;
11, 12 - торцевые электроды, расположенные на роторе;
13, 14 - торцевые электроды, расположенные на корпусе;
15, 16 - электроизоляционные части ротора - кольцевые и осевые;
17 - магнитопровод обмотки асинхронного электродвигателя;
18 - бесконтактный магнитный подшипник на пассивном магнитном подвесе.
Два электрода 9, расположенные на подвижной цилиндрической части ротора 1 - разрезаны вдоль образующих цилиндрического ротора в двух диаметрально расположенных зонах с целью создания возможности определения частоты вращения ротора и осуществления ее стабилизации. Против каждого кольцевого подвижного электрода на корпусе 2 прибора расположены по четыре пары неподвижных электродов 18-21 и  . Каждая из пар левого (фиг. 4) или, что то же самое, верхнего (фиг. 3-5) ряда электродов 18-21 соответствует парам
. Каждая из пар левого (фиг. 4) или, что то же самое, верхнего (фиг. 3-5) ряда электродов 18-21 соответствует парам  правого (нижнего) ряда электродов, смещенных вдоль образующей цилиндрической части ротора 1. Указанные пары неподвижных электродов и два кольцевых с разрезами электродов 9 образуют два датчика моментов межосевой радиальной коррекции, а также два датчика углов. В состав блоков 22-26 входят источники переменных напряжений, аналого-цифровые и цифроаналоговые преобразователи, контроллер 26 для определения углов α и β по сигналам измерительных электродов
правого (нижнего) ряда электродов, смещенных вдоль образующей цилиндрической части ротора 1. Указанные пары неподвижных электродов и два кольцевых с разрезами электродов 9 образуют два датчика моментов межосевой радиальной коррекции, а также два датчика углов. В состав блоков 22-26 входят источники переменных напряжений, аналого-цифровые и цифроаналоговые преобразователи, контроллер 26 для определения углов α и β по сигналам измерительных электродов  ,
,  и оценок угловых скоростей ωх, ωу соответственно. Усилители 22, 23 сверхвысокочастотных напряжений предназначены для определения и усиления сигналов углов α и β по сигналам измерительных электродов
и оценок угловых скоростей ωх, ωу соответственно. Усилители 22, 23 сверхвысокочастотных напряжений предназначены для определения и усиления сигналов углов α и β по сигналам измерительных электродов  ,
,  и для выработки сигналов для усилителей мощности 24, 25. Они соединены с силовыми электродами
и для выработки сигналов для усилителей мощности 24, 25. Они соединены с силовыми электродами  ,
,  фиг. 5, служащими для создания моментов сил коррекции. Контроллер 26 служит для определения оценок угловых скоростей ωх, ωу соответственно.
фиг. 5, служащими для создания моментов сил коррекции. Контроллер 26 служит для определения оценок угловых скоростей ωх, ωу соответственно.
В состав прибора входят четыре контура межосевой радиальной коррекции, включающих электроды 18-21 и  ; усилители 22-25; контроллер 26. При этом контроллер 26 предназначен, кроме вышеупомянутых функции, для выполнения операций линеаризации нелинейных функций зависимостей моментов сил коррекции от напряжений, выходы его 27 соединены со входами усилителей 24, 25 (условно не показаны).
; усилители 22-25; контроллер 26. При этом контроллер 26 предназначен, кроме вышеупомянутых функции, для выполнения операций линеаризации нелинейных функций зависимостей моментов сил коррекции от напряжений, выходы его 27 соединены со входами усилителей 24, 25 (условно не показаны).
Все токоведущие элементы электрически изолированы. В частности, торцевые электроды на роторе и корпусе крепятся через электроизоляционный слой.
Для дополнительного осевого центрирования ротора, наряду с бесконтактным подвесом на основе бесконтактных подшипников на пассивном магнитном подвесе, предназначены торцевые, имеющие разрезы, электроды 13 и 14, например, медные, расположенные на корпусе 2, а также сплошные торцевые, например, медные электроды 11 и 12, расположенные на роторе. Электроды 13 и 14 подключены к источнику СВЧ напряжения U3. Причем его частота выбирается такой, что находится в зарезонансной области амплитудно-частотной характеристики каждой торцевой (левой и правой 5) электрической цепочек R, L, С (фиг. 9), где С - междуэлектродная емкость. В этом режиме между неподвижным и подвижными электродами возникают силы отталкивания, как у механических пружин, за счет которых они дополнительно центрируют ротор вдоль оси - фиг. 1 и 4.
Благодаря используемому бесконтактному подвесу на основе бесконтактных подшипников на пассивном магнитном подвесе, осуществляющему осевое и радиальное центрирование ротора, требуемые для этого силы отталкивания между электродами существенно меньше, чем в прототипе.
Ротор 1 - составной, полый, герметичный, статически и динамически сбалансированный.
В роторе 1 соосно оси вращения размещена цилиндрическая герметичная камера, заполненная вязкой тяжелой жидкостью, при этом на внутреннюю поверхность цилиндрической камеры нанесен псевдорегулярный микрорельеф, а в качестве опор используются бесконтактные магнитные подшипники на пассивном магнитном подвесе.
Псевдорегулярный микрорельеф на внутренней поверхности цилиндрической камеры выполняет вспомогательную роль и служит для увеличения силы трения слоев вязкой тяжелой жидкости и внутренней поверхности цилиндрической камеры. В зависимости от угловой скорости вращения ротора 1 и от величины вязкости тяжелой жидкости параметры псевдорегулярного микрорельефа (в том числе - высота регулярных микронеровностей, осевой шаг неровностей и др.) могут составлять, например, 50…300 мкм. Он может быть нанесен одним из известных способов, например, вихревым точением или фрезерованием, ударным вибронакатыванием, вибродинамическим накатыванием и др.
В качестве вязкой тяжелой жидкости могут быть использованы, например, жидкость тяжелая ГПС-В на основе гетерополисоединений вольфрама по ТУ 2638-007-26279726-12, имеющая вязкость ~10 мПа с при 25°С и плотность 2,80±0,05 г/см3; приборная перфторуглеродная жидкость М-2-П, по ТУ 6-01-935-74, имеющая плотность при 20°С - не менее 2,0 г/см3, вязкость при 20°С в пределах 200…260 мПа с; вязкая тяжелая жидкость по патенту РФ №2343172, 2007 г. представляющая собой смесь олигомерных фракций перфторполиэфиров, выкипающих при температурах 130°С…320°С и выше с кинематической вязкостью 700…730 мм2/с при 20°С и плотностью при 35°С - не менее 1,86 г/см3.
В источниках [Черноусько Ф.Л. Движение твердого тела с полостями, содержащими вязкую жидкость. М.: Изд-во ВЦ АН СССР, 1968. - 230 с; Chernousko F.L., Akulenko L.D., Leshchenko D.D. Evolution of Motions of a Rigid Body About its Center of Mass. Cham: Springer, 2017.- 241 p.; Дерендяев H.B. Устойчивость вращения роторных систем, содержащих жидкость: Монография. - Нижний Новгород: Изд-во Нижегородского гос.университета, 2014. - 154 с; Акуленко Л.Д., Лещенко Д.Д., Палий Е.С.Эволюция вращения сфероида с полостью, заполненной жидкостью большой вязкостью. Известия РАН. Механика твердого тела. 2020, №2, с. 88-95 и др.] отмечено, что при небольших скоростях движения жидкости сила внутреннего трения Fmp пропорциональна относительной скорости v движущихся слоев, градиенту скорости в заданном направлении, вязкости η жидкости и зависит от площади соприкасающихся поверхностей Sn. Чем больше вязкость, тем сильнее жидкость отличается от идеальной, тем большие силы внутреннего трения в ней возникают.
В предложенной конструкции гидродинамического гироскопа величина силы внутреннего трения в жидкости будет определять параметры коэффициента демпфирования в приборе. Поэтому, изменяя геометрические размеры внутренней поверхности цилиндрической камеры (либо нескольких соосных цилиндрических камер) в полом роторе 1, параметры микрорельефа внутренней поверхности цилиндрической камеры, вязкость и плотность жидкости (либо нескольких используемых жидкостей), можно получить необходимую величину коэффициента демпфирования в приборе, исходя из технического задания и параметров движения подвижного объекта, для которого прибор предназначен.
В качестве опор ротора 1 используются бесконтактные подшипники на пассивном магнитном подвесе (например, по патентам авторов на изобретения "Магнитный подшипник" №185370, 2018 г., "Бесконтактный магнитный подшипник" №204695, 2021 г. и др.).
Поясним, что ранее авторами разработана принципиальная конструкция нового класса подшипников - бесконтактный подшипник вращения, использующий пассивный магнитный подвес.
Оригинальная конструкция пассивного магнитного подвеса бесконтактного подшипника вращения, изготовленная на основе современных технологий с использованием, в том числе, редкоземельных элементов, позволила создать совершенно новое изделие, обладающее большими преимуществами по - сравнению с существующими конструкциями шарикоподшипников.
Пассивный магнитный подвес, обеспечивающий бесконтактный подвес, состоит из системы двух разомкнутых пустотелых торов - внешнего и внутреннего, (в общем случае, имеющих поперечные сечения различного вида), один из которых находится внутри другого. Каждый из системы двух разомкнутых пустотелых торов изготовлен по особой технологии, имеющей "ноу-хау", из специально разработанного магнитного порошка на основе редкоземельных элементов; причем направление намагниченности каждого из торов противоположное; то есть, наружная поверхность внутреннего пустотелого тора и внутренняя поверхность наружного пустотелого тора имеют одинаковые магнитные полюса. При такой намагниченности при сборке конструкции подшипника внутренний пустотелый тор оказывается подвешенным за счет сил магнитного отталкивания внутри пустотелого наружного тора. В конструкции подшипника наружное кольцо подшипника через соединительные элементы соединено с внутренним тором, а роль внутреннего кольца подшипника выполняет внутренняя поверхность внутреннего диаметра наружного (внешнего) тора.
Преимуществами предлагаемой конструкции являются - отсутствие трения в подвесе, отсутствие необходимой обязательной смазки изделия, практически неограниченный срок службы, не связанный с ограниченным числом оборотов изделия, бесшумность, а также большая долговечность в широком диапазоне температур (-70°С…+250°С) и стоимость, в ряде случаев даже меньшая, чем при изготовлении традиционных шарикоподшипников.
Особо следует отметить, что имеется возможность изготовления бесконтактных подшипников вращения самых разнообразных типоразмеров, рассчитанных на различные, заранее определенные потребителем, величины осевых и радиальных нагрузок при эксплуатации изделия.
Укажем, что величина осевой и радиальной "жесткости" пассивного магнитного подвеса (18) обеспечивается конструктивно на этапе проектирования, исходя из заданных параметров линейного и углового движения подвижного объекта, а также геометрическими размерами - (в том числе толщиной) внутреннего и наружного торов из магнитного материала с взаимно-противоположным направлением намагничивания, определяющими величину магнитной энергии, характеризующей силы взаимного отталкивания. Внутренний и наружный торы из магнитного материала с взаимно-противоположным направлением намагничивания могут быть изготовлены из магнитотвердых материалов, обладающих большими значениями величин магнитной индукции и коэрцитивной силы на основе редкоземельных элементов, например, NdFeB.
Статор асинхронного электродвигателя привода ротора имеет магнитопровод 17, в пазах которого уложена, например, трехфазная обмотка статора, запитываемая от источника трехфазного переменного тока частоты 200…400 Hz. Активная часть ротора 7 - кольцевая, тонкая, омедненная.
Приведем сводку формул, необходимых для обоснования работы прибора.
Силы электростатического взаимодействия электродов определяются общей формулой:

где С - емкость между электродами выражается формулой:

где U - переменное напряжение,
ε, ε0 - электрическая проницаемость и электрическая постоянная;
d - расстояние между пластинками;
S - площадь меньшей из пластин.
При отсутствии силовых внешних воздействий на ротор он занимает симметричное положение, и все зазоры между кольцевыми электродами одинаковы. Одинаковы между собой также торцевые зазоры. Это обеспечивается в том числе за счет подбора материала ротора, плотности, объема и вязкости жидкости.
В соответствии со схемой включения измерительной цепочки (фиг. 9) сила тока в ней определяется по соотношению:

где U - СВЧ-напряжение источника напряжения;
С - емкость; s - символ дифференцирования;
R, L, Rx - резисторы регулирования тока и распределенные индуктивность и активное сопротивление элементов схемы (фиг. 9). Считая, что U=Uasin ωt, получим в частотно-временной области:

При этом падение напряжения Uc на электродах:

В зарезонансной области частот фазовый сдвиг φ2=-180°, поэтому имеем:


Так как  или
или 
то амплитуда напряжения на измерительных электродах равна:

Таким образом формируется выходная информация на измерительных электродах. В дальнейшем для каждого электрода будет присваиваться свой индекс, равный номеру его позиции. Здесь -  - амплитуда переменного напряжения на измерительных электродах. На силовых электродах от подведенного напряжения
- амплитуда переменного напряжения на измерительных электродах. На силовых электродах от подведенного напряжения  создается усилие:
создается усилие:

Напряжения на измерительных и силовых электродах - различные. Напряжения на силовые торцевые электроды подводятся от источников СВЧ - напряжений постоянной амплитуды, а на силовые электроды радиальной коррекции - от соответствующих СВЧ - усилителей мощности 24, 25.
Для соответствующего номера электрода формулам (1) и (2) придается соответствующий ему индекс. Съем сигналов производится с измерительных электродов 
 к которым подводится сверхвысокочастотное напряжение зарезонансной частоты для каждой измерительной цепочки с последовательно включенными источником -усилителем СВЧ-напряжения и электроэлементами: индуктивности, резистора и конденсатора, образованного соответствующими электродами. Согласно фиг. 5-7 для указанных выше измерительных электродов по формулам (2) и (4) будем иметь (учитывая соответствующие номера электродов):
к которым подводится сверхвысокочастотное напряжение зарезонансной частоты для каждой измерительной цепочки с последовательно включенными источником -усилителем СВЧ-напряжения и электроэлементами: индуктивности, резистора и конденсатора, образованного соответствующими электродами. Согласно фиг. 5-7 для указанных выше измерительных электродов по формулам (2) и (4) будем иметь (учитывая соответствующие номера электродов):
Для получения информации об углах имеем следующие формулы для амплитуд напряжений на измерительных электродах для зарезонансной частоты напряжения их питания:
Параметры индуктивности и площади электродов одинаковы, исходные зазоры также одинаковы поэтому, опуская лишние индексы, в итоге имеем:

Гидродинамический гироскоп функционирует следующим образом. После подключения напряжений питания ко всем необходимым электроэлементам ротор 1 устанавливается за счет действия магнитных и электростатических сил в положение, близкое к исходному.
Затем ротор 1 приводится во вращение с помощью асинхронного электродвигателя и увлекает во вращение вязкую тяжелую жидкость, заполняющую его внутреннюю соосную цилиндрическую герметичную камеру.
Если ротор имеет осевое смещение, то за счет сверхвысокочастотного напряжения, подводимого к половинкам двух торцевых неподвижных электродов, при его зарезонансной частоте - для электрических цепочек подключения электродов, между неподвижными и подвижными электродами с каждой стороны ротора возникают встречные силы отталкивания. Они подобны действию механических пружин, и в итоге устанавливают ротор в осевом устойчивом положении при одинаковых торцевых зазорах. За счет действия двух систем радиальной коррекции углы отклонения оси ротора от оси вращения также будут отсутствовать.
Картина симметрии изменяется при появлении угловых скоростей поворотов ПО. Если появляется угловая скорость подвижного объекта сох, возникает гироскопический момент Мгу=Нωх, где Н - кинетический момент гироскопа с увлеченной во вращение жидкостью. Он вызывает угловую скорость прецессии  вокруг оси ох, за счет которой появляется угол -α. Он преобразуется двумя измерительными парами электродов 19 и 19' в пропорциональные этому углу напряжения. Напряжения с электродов 19, равное
вокруг оси ох, за счет которой появляется угол -α. Он преобразуется двумя измерительными парами электродов 19 и 19' в пропорциональные этому углу напряжения. Напряжения с электродов 19, равное  а также с электродов 19', равное:
а также с электродов 19', равное:

подводится к соответствующим входам усилителя 22. В усилителе 22 сигналы суммируются, усиливаются и поступают затем в усилитель мощности 24. Если напряжения непосредственно, с учетом усиления в усилителе мощности, подключить к силовым электродам, то, согласно формуле (6), моменты будут зависеть от квадратов напряжений, то есть, нелинейно. Для исключения этого с помощью контроллера (26) напряжения линеаризуются, усиливаются в усилителе мощности 24 и подводятся к силовым электродам 20 и 20/, развивающим силы F20 и F20/, а, в итоге, момент сил коррекции Мку. Имеем:

где к0 - коэффициент усиления усилителя мощности. В установившемся режиме

В контроллере 26 по сигналам с 22 и 24 вырабатывается выходной сигнал по первому компоненту абсолютной угловой скорости ПО:

Аналогичные функции выполняют два канала, составленные из элементов 18, 23, 25 и 21, а также элементов  23, 25 и
23, 25 и  для определения второго компонента абсолютной угловой скорости ПО ωу. В итоге имеет место момент сил межосевой радиальной коррекции:
для определения второго компонента абсолютной угловой скорости ПО ωу. В итоге имеет место момент сил межосевой радиальной коррекции:


В установившемся режиме:

В контроллере 26 формируется выходной сигнал по второму компоненту угловой скорости поворотов ПО:

Углы α и β определяются по сигналам информационных датчиков 18,  19,
19,  в контроллере 26 и используются с выходов 27 для линеаризации сигналов с измерительных электродов с помощью контроллера 26, как это описано выше.
в контроллере 26 и используются с выходов 27 для линеаризации сигналов с измерительных электродов с помощью контроллера 26, как это описано выше.
Информация (13) и (17) является выходной для прибора.

Изобретение относится к системам ориентации, навигации и управления подвижных объектов (ПО). Сущность изобретения заключается в том, что в полом герметичном роторе гидродинамического гироскопа, соосно оси вращения размещена цилиндрическая герметичная камера, заполненная вязкой тяжелой жидкостью, при этом на внутреннюю поверхность цилиндрической камеры нанесен псевдорегулярный микрорельеф, а в качестве опор ротора используются бесконтактные магнитные подшипники на пассивном магнитном подвесе. Технический результат – возможность создания конструкции без гидростатического взвешивания ротора, снижение усилий, создаваемых межосевой радиальной коррекцией в приборе и уменьшение массогабаритных размеров. 9 ил.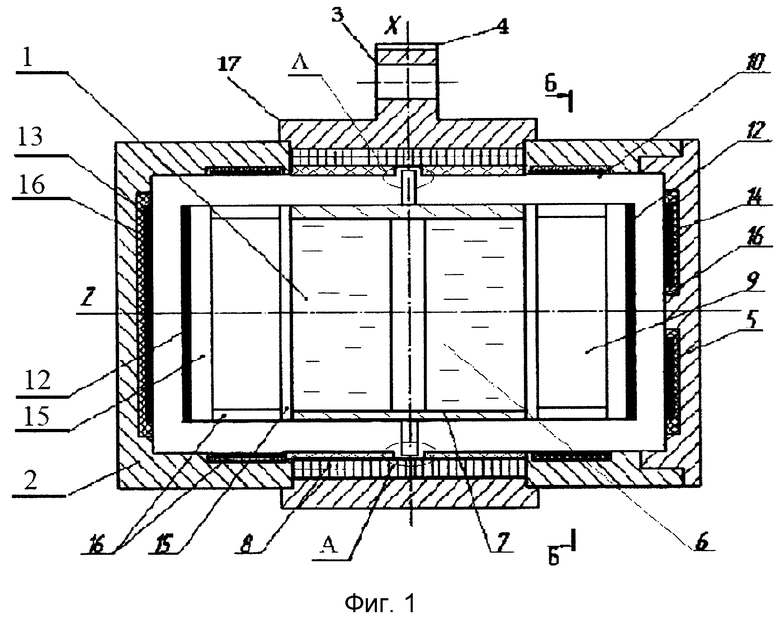
Гидродинамический гироскоп, в состав которого входят корпус, полый герметичный ротор, датчики съема угловой информации, электродвигатель привода ротора, а корпус установлен неподвижно относительно корпуса подвижного объекта, на ротор цилиндрической формы помещен в центральной части электроизолированный помедненный тонкостенный цилиндр, являющийся активной частью асинхронного электродвигателя, напротив него в центральной внутренней части корпуса помещен магнитопровод с обмотками статора электродвигателя привода ротора, с левого и правого торцов ротора нанесены круглые электроизолированные пластины торцевых подвижных электродов, на внутренней части корпуса напротив них размещены два разрезанных по диаметру электрода для осевого центрирования ротора, с левой и правой цилиндрических сторон ротора расположены разрезные электроды с двумя диаметральными осевыми, направленными вдоль образующей прорезями, в свою очередь, напротив кольцевых подвижных разрезных силовых электродов расположены по двум окружностям электроизолированные пластины, составляющие по четыре пары неподвижных электродов межосевой радиальной коррекции, электроды расположены через 90 угловых градусов по окружностям, причем рядом между собой размещены два измерительных, а затем - два силовых электрода, и они строго соответствуют друг другу по четырем образующим цилиндра, при этом одноименные измерительные электроды, расположенные по одной окружности, соединены с соседними силовыми электродами этой же окружности посредством последовательно соединенных двух блоков линеаризации нелинейностей в составе бортового контроллера, а также усилителя мощности, образуя четыре силовые цепочки, составляющие два контура радиальной коррекции по углам α и β, при этом торцевые разрезные электроды подключены параллельно к источнику сверхвысокочастотного напряжения, к другим источникам сверхвысокочастотного напряжения подключены восемь электродов радиальной коррекции, статор электродвигателя соединен с источником трехфазного переменного напряжения для привода во вращение ротора, четыре пары левых и правых неподвижных силовых электродов соединены через блок электроники с измерительными электродами, образующими датчики углов α и β, используемые в контроллере для определения выходных сигналов по угловым скоростям ωх, ωу, вторые выходы измерительных электродов предназначены за счет зазоров на активной части ротора электродвигателя для определения частоты вращения ротора и управления его с помощью блока электроники, отличающийся тем, что в полом герметичном роторе соосно оси вращения размещена цилиндрическая герметичная камера, заполненная вязкой тяжелой жидкостью, при этом на внутреннюю поверхность цилиндрической камеры нанесен псевдорегулярный микрорельеф, а в качестве опор ротора используются бесконтактные магнитные подшипники на пассивном магнитном подвесе.
| УСТРОЙСТВО для УЧЕТА ЭЛЕКТРОЛИТИЧЕСКИ ОСАЖДЕННОГО МЕТАЛЛА | 0 |
|
SU197374A1 |
| СПОСОБ ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ГИДРОДИНАМИЧЕСКОГО ГИРОСКОПА (ВАРИАНТЫ) | 2004 |
|
RU2270417C1 |
| CN 101788293 A, 28.07.2010 | |||
| US 5105668 A, 21.04.1992. | |||

