Изобретение относится к области управления полетами воздушных судов (ВС), в частности к оборудованию аэродромов пассивными средствами, и может быть использовано для автономной посадки ВС в условиях слабой освещенности района аэродрома при отсутствии видимости взлетно-посадочной полосы (ВПП) до высоты снижения 30 - 50 м, а в перспективе - при полном отсутствии видимости, на полевые и временные аэродромы, например на льдинах, в арктических и антарктических условиях, а также на аэродромы, оборудованные курсо-глиссадной системой.
Известна светотехническая аэродромная система, содержащая установленные вдоль границ ВПП и за ее пределами, в частности вдоль оси ВПП, электрические фонари (Жуков В.В. и др. Электрическое и световое оборудование аэропортов - М. : Транспорт, 1976, с. 11 - 19). Эта система обеспечивает визуальную посадку ВС в условиях слабой освещенности. Она имеет следующие недостатки:
необходимость наличия на аэродроме кабельного оборудования и мощного элекропитания;
высокая стоимость оборудования, установки и эксплуатации;
длительное время ее установки;
сравнительно низкая надежность;
невозможность обеспечения посадки в условиях низкой облачности и тумана.
Указанные недостатки не позволяют использовать эту систему на оперативных аэродромах.
Наиболее близким решением является аэродромная светотехническая система пассивного типа "Селена" (См. Патент РФ N 2043267 C1, кл. B 64 F 1/00, 1/18, E 01 F 9/00, 9/06, 1994 г.) Эта система содержит множество пассивных отражателей оптического диапазона волн, установленных вдоль границ ВПП и за ее пределами, в частности вдоль оси ВПП до ее начала. При освещении этих отражателей посадочными фарами ВС, пилот наблюдает световую картину, аналогичную той, что создается огнями электрической посадочной системы с расстояния от ВПП 2 - 3 км и ближе.
Эта система имеет на порядок более низкую стоимость оборудования, не требует кабельного оборудования и электропитания, практически не требует расходов на эксплуатацию, имеет высокую надежность и может быть развернута бригадой в 3 - 4 человека в течение 1 - 2 дней, вертолетная площадка оборудуется в течение 30 - 40 минут.
Недостатками этой системы являются:
малая дальность обнаружения ВПП (2-4 км);
невозможность ее использования при горизонтальной видимости менее 1 км, так как в этом случае отражение света фар ВС гидрометеорами слепит пилота.
Целью данного изобретения является доведение дальности, с которой пилот, пользуясь бортовым оборудованием (фары и метео-навигационная или прицельная РЛС), может определять положение ВС относительно ВПП в процессе предпосадочного маневра и посадки в нормальных и сложных метеоусловиях, до дальности точки начала глиссады и далее, а также повышения точности определения этого положения.
Поставленная цель достигается тем, что в системе для посадки ВС в условиях слабой освещенности, содержащей пассивные отражатели, установленные вдоль границ ВПП и за ее пределами, в частности вдоль оси ВПП, пассивные отражатели выполнены работающими одновременно в оптическом и радиолокационном диапазонах волн, формируя узконаправленное отражение на источник облучения, перемещающийся в широком телесном угле относительно каждого пассивного отражателя, причем каждый пассивный отражатель установлен так, что проекция оси максимального телесного угла, в котором он обеспечивает узконаправленное отражение на источник облучения с уровнем не ниже 3 дБ от максимального в радиолокационном (РЛ) и максимального в оптическом диапазонах волн, на горизонтальную плоскость - параллельна оси ВПП.
В настоящее время все гражданские самолеты с пассажировместимостью более 30 человек, а также все военно-транспортные самолеты оснащены метео-навигационными РЛС, а все боевые самолеты и вертолеты оснащены прицельными РЛС.
Опыт эксплуатации таких РЛС и имитационное моделирование показывают, что при длительности импульса менее 0,5 мкс и разрешающей способности по азимутальному углу 3-4o, на развертке индикатора по дальности 8-10 км (с соответствующей задержкой ее начала), пилот может обнаруживать прямолинейные структуры протяженностью 1,5 - 2 км и более, обозначенные большим количеством одинаковых радиолокационных отражателей, ЭПР которых превышает ЭПР подстилающей поверхности, на расстоянии 15 - 30 км, в метеоусловиях практически любой сложности. Это обстоятельство позволяет пилоту, пользуясь радиолокационной информацией, с достаточной точностью вывести ВС в точку начала глиссады на ВПП, обозначенную такими радиолокационными отражателями.
В процессе снижения по глиссаде пилот может контролировать с хорошей точностью боковое уклонение, дальность до начала ВПП и угол сноса с периодом обновления информации, обеспечиваемым данной РЛС (1-3 сек).
Используя указанную информацию, пилот может успешно пилотировать ВС в облаках при посадке на аэродромах, не имеющих курсо-глиссадных систем, до высоты 40 - 50 м. Выйдя на этой высоте из облаков и включив посадочные фары, он обнаруживает ВПП по отражениям от пассивных отражателей в оптическом диапазоне волн точно на ожидаемых расстоянии и боковом уклонении от оси ВПП. После этого ему остается только подкорректировать визуально положение ВС относительна глиссады и оси ВПП и завершить посадку.
При посадке на аэродромы, оборудованные курсо-глиссадной системой, использование данного изобретения позволит пилоту в сложных метеоусловиях контролировать с высокой достоверностью работу курсо-глиссадной системы по боковому каналу и одновременно получать информацию о расстоянии до начала ВПП, что значительно повышает безопасность снижения до высоты 15 - 30 м и, следовательно, повышает вероятность успешного завершения посадки визуально по пассивным отражателям в оптическом диапазоне волн или, если горизонтальная видимость ниже 1 км, по фонарям электротехнической системы. Такой контроль, очевидно, снижает психологическую нагрузку пилота и повышает вероятность своевременного обнаружения погрешностей в работе наземной аппаратуры.
В настоящее время в США и РФ ведутся работы по созданию бортовых метео-навигационных, землеобзорных и прицельных РЛС нового поколения, которые, в числе других, будут иметь посадочный режим работы, а также специализированных посадочных РЛС (см. США "Разработка моноимпульсной метео-навигационной РЛС, способной обеспечивать заход на посадку ЛА, - "Модар - 4000". Экспресс-информация. Зарубежные авиационные системы, N 21, Июнь 1993 г.; "Способ автономного формирования посадочной информации для ЛА и устройство для его осуществления". Патент СССР N 1836642 A3, G 01 S 13/00, приоритет 08.04.1991 г. Артемов В.Т.; "Акт по результатам совместных государственных летных испытаний опытного образца бортовой РЛС "Видимость" ... " 1981 г.).
Такие РЛС в посадочном режиме работы при заходе на посадку ВС на ВПП, оборудованную пассивными радиолокационными отражателями, обеспечат автономную выработку и представление на экране индикатора или лобовом стекле в удобном для восприятия пилотом виде практически всей информации, необходимой для управления ВС на посадке: продольное уклонение от глиссады; боковое уклонение от оси ВПП; угол крена; угол сноса; расстояние до начала ВПП; высота над подстилающей поверхностью; наличие препятствий вблизи зоны захода на посадку;
с периодом обновления информации около 0,3 сек.
Характер представления данной информации и степень ее избыточности обеспечивают надежный контроль ее достоверности. Появление неисправности в каком-либо элементе бортовой РЛ приводит к такому искажению изображения на экране индикатора, которое делает невозможным его восприятие пилотом.
В случае представления указанной информации на лобовом стекле, РЛС изображение ВПП накладывается на визуальное и практически совпадает с ним в основных элементах.
Известны пассивные отражатели, в которых используется световозвращающая пленка, например типа SM-3 (Сертификат DIN ISO 9003), закрепленная на поверхности геометрического тела или пластины, выполненных из различных материалов. Эти отражатели широко используются для обозначения автомобильных дорог, рулежных дорожек аэродромов и т.п. Недостатком таких пассивных отражателей является то, что они не могут быть использованы в условиях сильного тумана или дождя.
Наиболее близким решением к заявляемому является пассивный отражатель, выполненный в виде геометрического тела, на поверхности которого закреплена световозвращающая пленка. Такие пассивные отражатели используются для установки вдоль границ ВПП и за ее пределами, в частности вдоль оси ВПП, в системе "Селена" для посадки ВС (Патент РФ N 2043267).
Основным видом пассивного отражателя, рекомендованного для использования в системе "Селена", является отражатель, выполненный в виде геометрического тела, представляющего собой четырехугольную пирамиду на квадратном параллелепипеде, выполненного из металлических пластин, на поверхности которого закреплена световозвращающая пленка.
Этот пассивный отражатель дает узконаправленное отражение в оптическом диапазоне волн на источник облучения, перемещающийся в широком телесном угле, практически во всей верхней полусфере.
Недостатком этого отражателя является то, что в радиолокационном диапазоне волн он дает узконаправленное отражение в нескольких очень узких телесных углах (в направлении нормалей к каждой из формирующих его плоскостей), а в остальных ракурсах отражение уходит в сторону от источника облучения.
Указанный недостаток делает практически невозможным использование этих пассивных отражателей в радиолокационном диапазоне волн, так как при движении ВС не обеспечивается получение устойчивых РЛ сигналов от всей группы отражателей системы, а возможен только прием хаотических всплесков отражений от отдельных отражателей этой группы. Данное обстоятельство не только не помогает обнаруживать ВПП по окружающим ее радиолокационным ориентирам, но, напротив, усложняет ее обнаружение при помощи бортовой РЛС.
Целью изобретения является создание пассивного отражателя, дающего узконаправленное отражение максимальной интенсивности на источник облучения, перемежающийся в широком телесном угле, одновременно в оптическом и РЛ диапазонах волн.
Поставленная цель достигается тем, что в пассивном отражателе, выполненном в виде геометрического тела, на поверхности которого закреплена световозвращающая пленка, несущая конструкция выполнена в виде нескольких элементов, формирующих в совокупности один или несколько РЛ отражателей, обеспечивающих узконаправленное отражение на источник облучения, перемещающийся в широком телесном угле относительно пассивного отражателя так, что оси максимумов их отражений в РЛ диапазоне волн оптимальным образом совмещены с аналогичными осями в оптическом диапазоне волн, а геометрическое тело и световозвращающая пленка выполнены радиопрозрачными.
На чертеже представлен один из возможных вариантов конструктивного выполнения пассивного отражателя, обеспечивающего узконаправленное отражение на источник облучения практически во всей верхней полусфере одновременно в оптическом и РЛ диапазонах волн, где:
1 - отражатель в сборе;
2 - треугольная пирамида;
3 - нижний дополняющий многогранник;
4 - сборка из 4 треугольных пирамид;
5 - верхний дополняющий многогранник.
Пассивный двухдиапазонный отражатель 1 представляет собой геометрическое тело в форме четырехугольной пирамиды на квадратном параллелепипеде, собранное и скрепленное, например при помощи клея, из четырех треугольных пирамид 2, выполненных из радиопрозрачного материала, например пеностирола, боковые грани которых покрыты фольгой или металлизированы, положенных на нижнем дополняющем многограннике 3 так, что они соприкасаются между собой вершинами и попарно двумя ребрами 4, сверху зафиксированы верхним дополняющим многогранником 5, а их основания совпадают с боковыми гранями отражателя.
На поверхности сформированного таким образом геометрического тела закреплена, например при помощи клея, радиопрозрачная световозвращающая пленка, например типа SM-3 (сертификат DIN ISO 9002).
Пассивный отражатель работает следующим образом.
Поскольку каркас отражателя, в сущности, представляет собой четыре смежных уголковых отражателя РЛ диапазона, то падающая на него электромагнитная волна, в зависимости от направления на источник излучения, претерпевает полное отражение в одном или двух из этих четырех уголковых отражателей. Таким образом, интенсивность отраженного сигнала в обратном направлении слабо зависит от положения источника облучения практически во всей верхней полусфере пассивного отражателя.
Поскольку световозвращающая пленка покрывает все восемь верхних граней геометрического тела, а телесный угол узконаправленного на источник облучения отражения каждой грани в оптическом диапазоне больше 45o относительно нормали к ней, то световой поток претерпевает полное отражение в призмах двух или четырех граней отражателя одновременно. Таким образом, интенсивность отраженного сигнала в обратном направлении слабо зависит от положения источника облучения во всей верхней полусфере пассивного отражателя и в оптическом диапазоне волн.
Следовательно, оси телесных углов узконаправленного отражения обоих диапазонов в пассивном отражателе данной конструкции практически совмещены.
Максимальное значение ЭПР такого отражателя с отношением высоты параллелепипеда к стороне квадрата, меньшим или равным 0,86, в диапазоне 3,2 см равно:
сторона квадрата 30 см, ЭПР = 4 • 3,14(0,289 • 0,32)2/0,0322 = 8,3 м2;
сторона квадрата 20 см, ЭПР = 1,64 м2, что более чем на порядок превышает ЭПР подстилающей поверхности.
По сравнению с прототипом такой отражатель будет иметь меньший вес, лучшую сминаемость при наезде на него. Его можно устанавливать на акваториях без дополнительных поплавков.
Предлагаемая конструкция двухдиапазонного отражателя и используемые в ней материалы не превышают стоимости аналогичного по размерам однодиапазонного отражателя системы "Селена", т.е. 285 $. Стоимость оборудования ВПП длиной 2 км составит при этом 35000 - 56000 $.
Приведенные материалы позволяют сделать следующие выводы:
в условиях слабой освещенности использование только оптических пассивных отражателей в системе посадки и посадочных фар ВС не обеспечивает выполнения первого этапа посадочного маневра (мала дальность обнаружения ВПП (2- 4 км) даже в условиях идеальной оптической прозрачности атмосферы);
использование только радиолокационных пассивных отражателей и современных бортовых РЛС не обеспечивает выполнение заключительного этапа посадочного маневра, с высоты 40 - 60 м (нет надежной информации о высоте и уклонении от глиссады в продольной плоскости, велик период обновления информации (1 - 3 сек), не оптимальна форма представления информации пилоту).
Следовательно, только использование пассивных двухдиапазонных оптико-радиолокационных отражателей позволит сегодня полностью решить задачу выполнения посадочного маневра не только ночью, но и при наличии плотной облачности с высотой нижней кромки 50 - 60 м.
На основании вышеизложенного считаем целесообразным с целью набора опыта использования существующих бортовых РЛС и посадочных фар для выполнения захода на посадку и посадки в условиях слабой освещенности и при низкой облачности на оперативные аэродромы, а также подготовки аэродромов для более эффективного использования бортовых РЛС нового поколения начать оборудование аэродромов пассивными, оптико-радиолокационными отражателями, работающими одновременно в радиолокационном и оптическом диапазонах волн.
Изобретение относится к области управления полетами. Система содержит пассивные отражатели, установленные вдоль границ ВПП и за ее пределами. Пассивные отражатели работают одновременно в оптическом и радиолокационном диапазонах волн, формируя узконаправленное отражение на источник облучения. Каждый пассивный отражатель установлен так, что проекция оси максимального телесного угла, в котором он обеспечивает узконаправленное отражение на источник облучения с уровнем не ниже 3 дБ от максимального в радиолокационном (РЛ) и максимального в оптическом диапазонах волн, на горизонтальную плоскость параллельна ВПП. Несущая конструкция пассивного отражателя выполнена в виде нескольких элементов, формирующих в совокупности одни или несколько РЛ отражателей, обеспечивающих узконаправленное отражение на источник облучения, перемещающийся в широком телесном угле относительно пассивного отражателя. При этом оси максимумов их отражений в РЛ диапазоне волн оптимальным образом совмещены с аналогичными осями в оптическом диапазоне волн. Геометрическое тело отражателя покрыто световозвращающей пленкой. Последние выполнены радиопрозрачными. Изобретение позволяет увеличить дальность определения положения воздушного судна в сложных метеоусловиях до дальности начала глиссады. 2 с. и 1 з.п.ф-лы, 1 ил.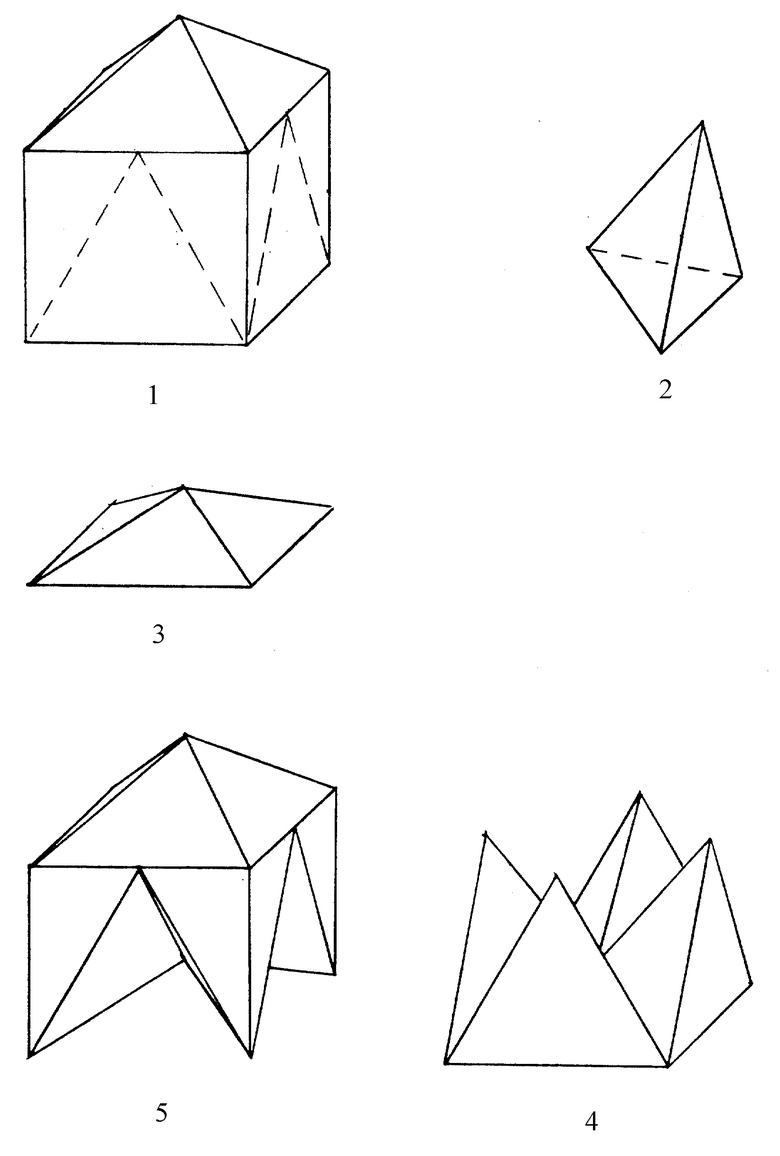
| СИСТЕМА СВЕТОВОЙ СИГНАЛИЗАЦИИ ДЛЯ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА В НОЧНОЕ ВРЕМЯ | 1994 |
|
RU2043267C1 |
| RU 94042114 A1, 27.09.1996 | |||
| СОЛНЕЧНАЯ ЭЛЕКТРОСТАНЦИЯ (ВАРИАНТЫ) | 1992 |
|
RU2034204C1 |
| RU 2056334 C1, 20.03.1996 | |||
| RU 2055785 C1, 16.03.1996. | |||

