Изобретение относится к электротехнике, а именно к универсальному бесконтактному электродвигателю переменного тока с короткозамкнутой обмоткой ротора, имеющего вращательное или линейное конструктивное исполнение, допускающего возможность плавного регулирования частоты вращения или скорости поступательного движения в широком диапазоне, работающего в синхронном и асинхронном режимах.
Область техники: в различных регулируемых и нерегулируемых маломощных и мощных электроприводах механизмов и систем автоматики, в частности синхронного, синфазного и шагового режимов, а также благодаря бесконтактной короткозамкнутой обмотке ротора в пожароопасных, взрывоопасных, агрессивных, токсичных, высокотемпературных средах и под водой.
Уровень техники: основными недостатками современных синхронных электродвигателей являются наличие ненадежных искрящихся колец на коллекторе ротора для передачи тока во вращающуюся обмотку возбуждения и сложных устройств регулирования тока возбуждения, особенно при пусковых и низкооборотных режимах работы. От этих недостатков избавляются использованием одного из способов бесконтактной передачи электроэнергии на ротор.
Чаще всего для этого используют роторы из магнитно-твердых сплавов без обмоток возбуждения (реактивные или гистерезисные синхронные электродвигатели, см., например Л1, Вольдек А.И. Электрические машины. "Энергия", М.-Л., 1971, с. 794-795; Авторское свидетельство СССР N 1345291, МКИ H 02 K 19/02 от 15.10.87, Бюл.N 38) или вращающиеся выпрямители обмоток возбуждения (см. например Патент Японии N 5-3223, МКИ H 02 K 19/10, 19/36 от 14.01.93, N 7-81; Авторское свидетельство СССР N 1671170, МКИ H 02 K 19/14 от 15.08.91, Бюл. N 30). В первом случае роторы являются дорогостоящими и используются в основном для синхронных электродвигателей малой мощности с повышенной надежностью. Во втором случае усложняется конструкция электродвигателей за счет дополнительных вращающихся выпрямительных узлов и увеличиваются их габаритные размеры.
Наиболее близким к предлагаемому электродвигателю является синхронный реактивный электродвигатель (Авторское свидетельство СССР N 1497687, МКИ H 02 K 19/14 от 30.07.89, Бюл. N 28), содержащий статор с многофазной обмоткой и ротор из пакета ферромагнитного материала, в котором уменьшение отношения ширины паза к его глубине выполнены по закону косинуса. Этот электродвигатель выбран в качестве прототипа. Хотя он имеет более высокие энергетические показатели по сравнению с вышеуказанными электродвигателями, однако высокая стоимость и большой вес ротора являются его существенными недостатками.
Сущность изобретения: в основу изобретения поставлена задача создать синхронно-асинхронный электродвигатель с короткозамкнутой обмоткой ротора, который может иметь вращательное или линейное конструктивное исполнение, путем выполнения двух требований. Первое - витки и секции любой короткозамкнутой обмотки ротора выполнены параллельно или симметрично к его продольной оси, при этом индуктируемые в них ЭДС магнитным потоком статора вызывают противодействующий синхронизирующий момент при отклонении ротора от точки устойчивого равновесия, т.е. чтобы электродвигатель обладал угловой моментной характеристикой. Второе - для напряжений питания фазных обмоток статора, которые обеспечивают вращающееся магнитное поле статора и асинхронный режим работы, введено дополнительное амплитудное изменение для передачи энергии из статора в ротор при синхронном режиме работы.
При этом обеспечить плавное регулирование частоты вращения или скорости поступательного движения в широком диапазоне, повышение КПД, расширение зоны применяемости в различных регулируемых и нерегулируемых маломощных и мощных электроприводах механизмов и систем автоматики, в частности синхронного, синфазного и шагового режимов, применение в безредукторных электроприводах, надежную работу в пожароопасных, взрывоопасных, агрессивных, токсичных, высокотемпературных средах и под водой, использование в синхронном и асинхронном режимах, фиксирование ротора в тормозном режиме при однофазном включении, увеличение угла демпфирования ударного момента, простоту и надежность конструкции.
Перечень фигур чертежей:
На фиг. 1 условно показан один виток короткозамкнутой обмотки на роторе, выполненный параллельно к его продольной оси dd.
На фиг. 2 показан вариант секции из отдельных замкнутых витков короткозамкнутой обмотки явновыраженного ротора, выполненной параллельно к его продольной оси dd.
На фиг. 3 показан вариант из нескольких секций, где конец последней соединен с началом первой секции, короткозамкнутой обмотки ротора, выполненной параллельно к его продольной оси dd.
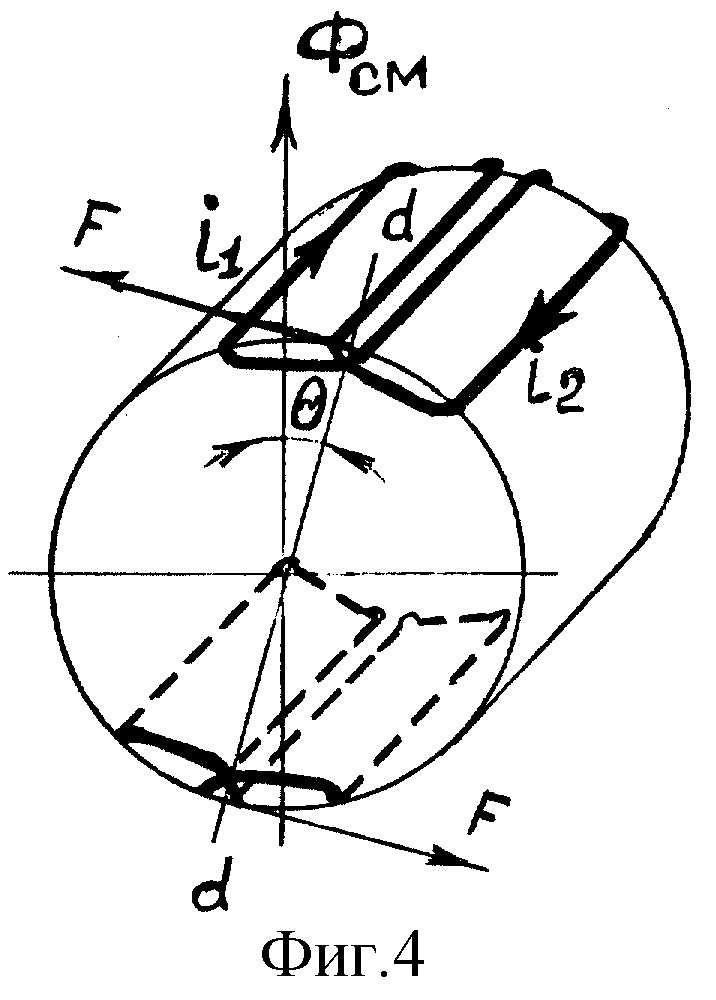
На фиг. 4 условно показано по два разностных витка короткозамкнутой обмотки на роторе, выполненные симметрично к его продольной оси dd и соединенные встречно между собой в лобовой части.
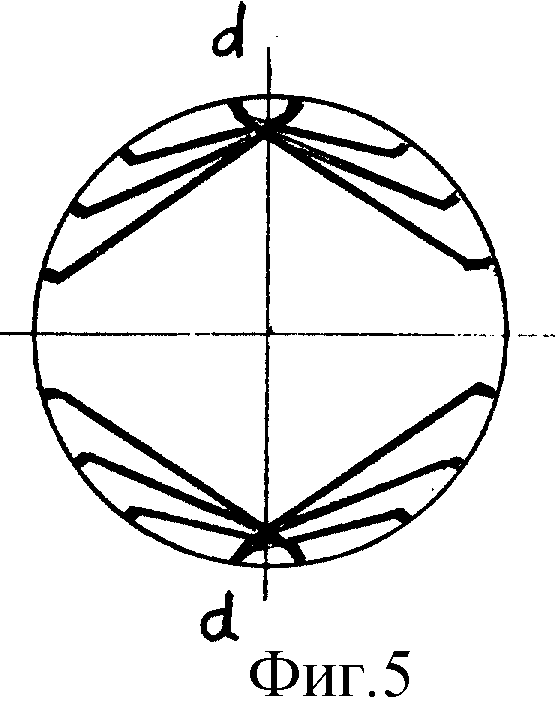
На фиг. 5 показан вариант секции из веерообразных разностных витков короткозамкнутой обмотки ротора, выполненной симметрично к его продольной оси dd и соединенных соответственно встречно между собой в лобовой части.
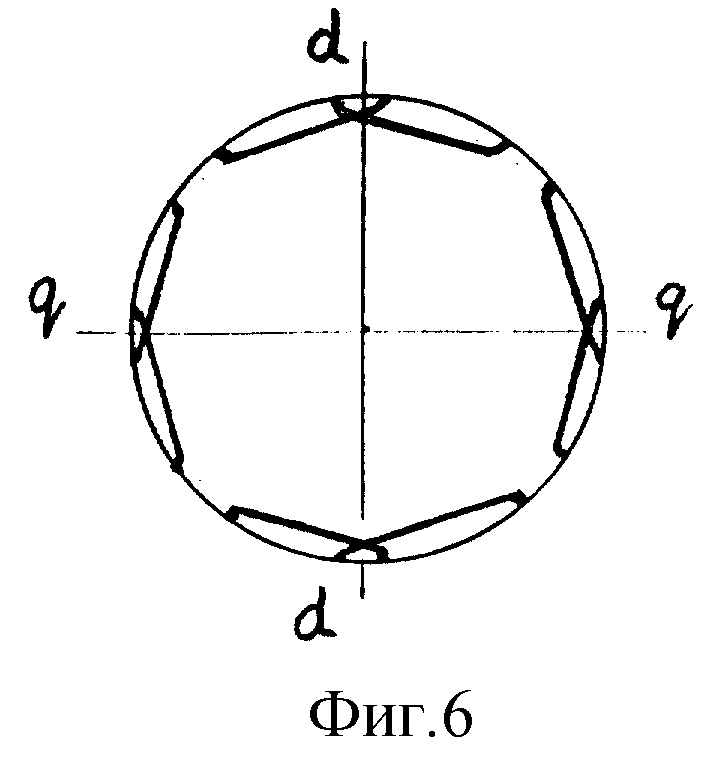
На фиг. 6 показан вариант: по два разностных витка четырехполюсной короткозамкнутой обмотки ротора, выполненные симметрично к его продольной оси dd и поперечной оси qq, а также соединенные встречно между собой в лобовой части.
На фиг. 7 показаны варианты исполнения витков короткозамкнутой обмотки ротора (позиционера), выполненные параллельно (слева) и симметрично (справа) к его продольной оси линейного электродвигателя.
На фиг. 8 условно показан двухфазный синхронный электродвигатель с обмотками статора и короткозамкнутой параллельной обмоткой ротора.
На фиг. 9 показаны графики угловой моментной характеристики синхронного электродвигателя с короткозамкнутой обмоткой ротора и обычного синхронного электродвигателя с активным коллекторным ротором.
Сведения, подтверждающие возможность осуществления изобретения: для достижения поставленной задачи сначала рассмотрим создание синхронного электродвигателя с короткозамкнутой обмоткой ротора, а также бесконтактное управление частотой вращения такого ротора.
Для этого необходимо выполнить следующие два требования:
1. Создать короткозамкнутый ротор с точкой устойчивого равновесия по углу нагрузки Θ, т.е. чтобы изобретение обладало синхронизирующим моментом или так называемой угловой моментной характеристикой, которая присуща всем синхронным электродвигателям (см. например Л1 стр. 714-721, Л2 стр. 416-417). Это будет достигнуто, если короткозамкнутую обмотку выполнить на пакете ферромагнитного сердечника ротора специальным образом, т.е. необходимо витки и секции любой короткозамкнутой обмотки выполнить параллельно или симметрично к его продольной оси, при этом индуктируемые в них ЭДС магнитным потоком статора вызывают противодействующий синхронизирующий момент при отклонении ротора от точки устойчивого равновесия. На фиг. 1 показан виток короткозамкнутой обмотки на роторе, который выполнен параллельно к его продольной оси dd. На фиг. 4 показаны два разностных витка короткозамкнутой обмотки на роторе, которые выполнены симметрично к его продольной оси dd и соединены встречно между собой в лобовой части.
Покажем, что роторы с такими короткозамкнутыми обмотками обладают угловой моментной характеристикой. При нахождении ротора в точке устойчивого равновесия, когда продольная ось ротора dd совпадает с осью магнитного потока статора Фст, т.е. когда угол между ими Θ = 0, в короткозамкнутой параллельной обмотке на фиг. 1 ЭДС индуктироваться не будет, т.е. результирующий ток ip равен нулю, т.к. эта обмотка будет расположена вдоль магнитного потока, статора, и ее площадь для пересечения потоком равна нулю. В короткозамкнутой симметричной разностной обмотке на фиг. 4 в этих условиях индуктируемые ЭДС в левой и правой секциях будут равны при их идентичности, иметь максимальные значения, но направлены встречно, т.е. и в этом случае результирующий ток ip=i1-i2 будет равен нулю.
При отклонении ротора от точки устойчивого равновесия на угол Θ в короткозамкнутой параллельной обмотке ротора на фиг.1 будет индуктироваться ЭДС, пропорциональная sinΘ, т.е. пропорциональная увеличению площади пересечения обмотки потоком статора, а в короткозамкнутой симметричной разностной обмотке на фиг. 4 индуктируемая ЭДС левой секции станет больше индуктируемой ЭДС правой секции во столько раз, во сколько раз изменится отношение их площадей пересечения потоком статора и результирующая ЭДС будет пропорциональна sinΘ. Эти индуктируемые ЭДС в первом и во втором случае вызывают результирующий ток ip в короткозамкнутой обмотке ротора. В результате взаимодействия этого тока ip с магнитным потоком статора Фст по закону Ампера возникает сила F, действующая на обмотку ротора и создающая противодействующий синхронизирующий момент, который будет стремиться возвратить ротор в точку устойчивого равновесия, т.е. свести угол θ до нуля. Таким образом, электродвигатели с вышеуказанными короткозамкнутыми обмотками ротора, на фиг. 1 и фиг. 4 обладают угловыми моментными характеристиками.
На фиг. 2 и фиг. 3 показаны некоторые из возможных вариантов практического исполнения параллельных короткозамкнутых обмоток, аналогичных фиг. 1.
На фиг. 5 и фиг. 6 - встречных симметричных короткозамкнутых обмоток, аналогичных фиг. 4.
На фиг. 7 показаны статор 1, роторы (позиционеры) 2 и 3, направляющие роторов 4 линейного электродвигателя с двумя возможными вариантами практического исполнения параллельной 5 и симметричной 6 короткозамкнутых обмоток роторов, аналогичных фиг. 1 и 4 соответственно.
2. Обеспечить бесконтактную передачу управляемой электромагнитной мощности из обмотки статора в короткозамкнутую обмотку ротора.
В синхронных электродвигателях при установившемся режиме ротор вращается синхронно с вращающимся магнитным полем статора. При этом вращающееся магнитное поле статора является неподвижным относительно вращающегося ротора, не пересекает обмотку ротора и поэтому не может индуктировать в ней каких-либо ЭДС. В этих условиях невозможно обеспечить бесконтактную передачу электромагнитной мощности.
Указанная передача мощности будет обеспечена, если вектор Фс вращающегося магнитного потока статора
ΦC = ΦCM•ejΩt, (1)
который имеет постоянный по амплитуде модуль Фсм=const и описывает своим концом окружность с частотой Ω, будет дополнительно изменяться еще и по амплитуде по любому временному закону:
ΦC = ΦCM(t)•ejΩt. (2)
Теперь в режиме синхронного вращения магнитный поток статора будет пересекать короткозамкнутую обмотку ротора и индуктировать в ней ЭДС, которая вызывает ток обмотки ротора, взаимодействие которого с магнитным потоком статора, согласно закону Ампера, порождает электромагнитный крутящий момент ротора.
При двухфазном электродвигателе со взаимно перпендикулярными обмотками статора, магнитный поток (2) можно разложить по осям этих обмоток. С учетом перехода от показательной к тригонометрической форме записи:
ΦC = ΦCM(t)•(cosΩt+jsinΩt). (3)
Закон изменения модуля магнитного потока статора может быть, например, синусоидальным
где 
либо периодическим
либо почти периодическим и т.д.
В выражении (4) магнитный поток статора Фс состоит из двух взаимно перпендикулярных потоков. В первом синусоидальное изменение амплитуды вектора магнитного потока с частотой ω модулировано фазным косинусоидальным сигналом частоты Ω а во втором - фазным синусоидальным сигналом частоты Ω. Исходя из этого предлагаемое изобретение можно еще назвать - синхронный электродвигатель с короткозамкнутой обмоткой ротора и модулированными потоками (токами или напряжениями питания).
Таким образом, в изобретении дополнительное амплитудное изменение модуля вектора магнитного потока (в частности синусоидальное с частотой ω обеспечивает передачу управляемой мощности из обмоток статора в короткозамкнутую обмотку ротора, а фазные сигналы частоты Ω определяют частоту вращения магнитного поля и ротора, которая управляема в широком диапазоне.
Для анализа преимуществ изобретения рассмотрим простой двухфазный синхронный электродвигатель с короткозамкнутой параллельной обмоткой неявно выраженного двухполюсного ротора (см. фиг. 8). В нем вращение магнитного поля статора обеспечивается с помощью двух взаимно перпендикулярных статорных обмоток W1 и W2, на которые подаются модулированные фазные напряжения с дополнительным амплитудным изменением по синусоидальному закону с частотой ω
U1 = U1мsin(ωt+α)cosΩt (6)
и
U2 = U2мsin(ωt+α)sinΩt. (7)
Токи i1 и i2 которые возникают в обмотках W1 и W2, идентичны выражениям (6) и (7), порождают магнитные потоки, приведенные в выражении (4).
Из выражения (4) видно, что условия передачи управляемой мощности из обмоток статора в короткозамкнутую обмотку ротора определяются амплитудой вектора магнитного потока Фсм частотой его изменения ω и не зависят от частоты вращения Ω магнитного поля и ротора. В этих условиях при неизменных Фсм и ω электродвигатель будет работать с неизменной передачей мощности от максимально возможной до очень низкой частоты вращения ротора, полной его остановки, в шаговом режиме и в режиме фиксации заданного угла, причем его угловая моментная характеристика будет определяться только углом нагрузки Θ.
Расчетным путем с учетом Л3 и Л4 авторами получено выражение момента вращения ротора рассматриваемого электродвигателя при низких оборотах и в режиме останова, которое с допустимыми упрощениями имеет вид
где Uф - амплитудное значение фазного напряжения обмотки статора;
XLC = ωLC - индуктивное сопротивление обмоток статора;
K2=Lм 2/LсLр - коэффициент связи между статорной и роторной обмотками;
Lм - взаимоиндуктивность между обмотками статора и ротора;
Lс - индуктивность обмотки статора;
Lр - индуктивность короткозамкнутой обмотки ротора.
Из полученного выражения (8) следует:
1. Знак минус перед выражением указывает на то, что возникающий электромагнитный момент вращения ротора MВР противодействует росту угла нагрузки Θ, значит точка, когда Θ = 0 и MВР, является точкой устойчивого равновесия угловой моментной характеристики. Любая попытка изменить уголку Θ путем увеличения момента нагрузки приводит к росту электромагнитного момента вращения ротора, направленного навстречу моменту нагрузки и стремящегося уменьшить угол Θ до нуля.
2. Для изменения частоты вращения коллекторного синхронного электродвигателя необходимо осуществить регулировку, например в сторону уменьшения, трех независимых величин одновременно: частоты фазных напряжений питания, амплитуды фазных напряжений питания и амплитуды постоянного напряжения, обеспечивающего ток возбуждения ротора [Л2, стр. 416, 417, 418, 423]. Это выполнять сложно и поэтому регулировку частоты вращения роторов таких синхронных электродвигателей практически не применяют.
В выражении (8) все составляющие момента вращения предлагаемого электродвигателя не зависят от частоты Ω. Быстрое или плавное изменение частоты Ω вращения ротора осуществляется путем такого же или плавного регулирования частоты Ω фазных напряжений питания в широком диапазоне частот.
Кроме того, в предлагаемом электродвигателе глубина регулирования частоты вращения ротора вниз не ограничена никакими факторами, отношение может составлять 1: 10000 и выше. В то время как в известных синхронных электродвигателях такая глубина регулирования ограничена принципиально и отношение составляет примерно 1:300.
3. Электромагнитный момент вращения ротора MВР пропорционален квадратному значению амплитуды фазного напряжения UФ 2 (как и в асинхронных электродвигателях), которое остается неизменным при любой частоте Ω вращения ротора. Благодаря этому предлагаемый электродвигатель имеет повышенный КПД по сравнению с существующими синхронными и асинхронными, у которых с уменьшением частоты вращения необходимо уменьшать амплитуду фазного напряжения на обмотках статора, а следовательно, снижается КПД из-за уменьшения и недоиспользования мощности этих электродвигателей.
Квадратичная зависимость момента от фазного напряжения обмотки статора имеет недостаток и преимущество. Недостаток заключается в том, что предлагаемый синхронный электродвигатель, как и асинхронный, чувствителен к уменьшению подводимого напряжения питания. Преимущество заключается в том, что увеличение напряжения питания на каждые 10% вызывает приращение момента вращения на 20%, что позволяет резко повышать перегрузочную способность предлагаемого синхронного электродвигателя в переходных режимах при питании от преобразователя.
В режиме холостого хода угол нагрузки θ = 0, ток ротора Ip=0 и момент вращения ротора MВР=0. При этом остаются лишь потери мощности сети на перемагничивание ферромагнитных пакетов статора и ротора. А это значит, что потребляемая мощность сети расходуется экономно и прямо пропорционально моменту нагрузки на валу ротора при любой частоте вращения. Это также повышает КПД предлагаемого электродвигателя.
При уменьшении и стремлении к нулю активных сопротивлений обмоток статора и ротора электромагнитный момент вращения не уменьшается, электродвигатель остается работоспособным, его КПД возрастает, т.к. исчезают потери мощности в обмотках статора и ротора, кроме вышеуказанных потерь на перемагничивание ферромагнитных пакетов статора и ротора. Поэтому КПД предлагаемого электродвигателя может превосходить КПД асинхронного электродвигателя, для которого по принципу работы существует предел снижения потерь и повышения КПД. Из вышеизложенного следует, что при сверхнизких температурах, когда наступает сверхпроводимость материалов обмоток статора и ротора, асинхронный электродвигатель теряет работоспособность, а предлагаемый электродвигатель работоспособность не теряет и его КПД стремится к единице.
4. Электромагнитный момент вращения при малых углах θ пропорционален sin2θ, и достигает максимального значения не при θ = 45o, а при 65-80o в зависимости от величины К2. Это является преимуществом, т.к. угол демпфирования ударных моментов и быстро наростающих нагрузок увеличился почти в два раза. Такой электродвигатель значительно легче переносит ударные нагрузки на валу ротора.
На фиг. 9 представлен график угловой моментной характеристики в относительных величинах M1(θ)/Mmax предлагаемого электродвигателя. При этом относительная величина момента вращения зависит только от угла  и коэффициента связи К2 и не зависит от Uф, ω, XLC, см(.8). А это означает, что все электродвигатели с одинаковыми значениями К2, но с разными значениями Uф, ω, и XLC, т.е. электродвигатели разных габаритов и мощностей, имеют одну и ту же угловую моментную характеристику в относительных величинах.
и коэффициента связи К2 и не зависит от Uф, ω, XLC, см(.8). А это означает, что все электродвигатели с одинаковыми значениями К2, но с разными значениями Uф, ω, и XLC, т.е. электродвигатели разных габаритов и мощностей, имеют одну и ту же угловую моментную характеристику в относительных величинах.
Пунктирной линией представлен аналогичный график угловой моментной характеристики M2(θ)/Mmax обычного синхронного электродвигателя (см. Л2, стр. 416-417, форм.11.14, рис 11.11)
Анализируя эти графики можно отметить:
1) интервал устойчивой работы (0-80o и 0-90o) обеих электродвигателей примерно одинаков;
2) интервал неустойчивой работы (20o и 180o) у предлагаемого электродвигателя примерно в 9 раз меньше;
3) при малых углах θ (0-30o), т.е. при малых моментах нагрузки, угловая моментная характеристика предлагаемого электродвигателя менее жесткая (наклонена), а при средних и больших (30o-80o) - более жесткая, чем у обычных синхронных электродвигателей, что допускает увеличение его перегрузочной способности, обеспечивает более активное затухание переходных процессов и большую точность передачи для метрологических и комплексных механизмов при синхронном, синфазном и шаговом режимах.
5. Большая глубина регулирования частоты вращения ротора, особенно в сторону уменьшения до долей оборотов в секунду, расширяет зону применяемости предлагаемого электродвигателя в различных механизмах, системах автоматики, точной электромеханики, а также в маломощных и мощных безредукторных электроприводах.
6. На фиг. 2 показан вариант секции из отдельных параллельных короткозамкнутых витков на явно выраженном роторе. При этом момент вращения увеличивается за счет дополнительного реактивного момента, создаваемого самим сердечником ротора.
На фиг. 3 показан вариант из последовательно соединенных параллельных секций, у которых конец витка последней соединен с началом первой. При этом число витков в секциях может быть различным, благодаря чему угловые моментные характеристики могут иметь нужную форму для потребного электропривода.
На фиг. 5 и 6 показаны варианты короткозамкнутых симметричных встречных обмоток, секции которых в разных вариантах могут быть связаны гальванически и индуктивно. Расположение секций на фиг. 5 позволяет формировать круторастущию моментную характеристику, это очень важно, например для электропривода электровоза и электромобиля, а на фиг. 6 - медленно нарастающую, но крутоспадающую, это очень важно, например, для электропривода экскаватора и станочного оборудования. На общую характеристику короткозамкнутых обмоток можно влиять и с помощью числа витков в их секциях, выполняя их с разным числом. Несимметрия в выполнении короткозамкнутых обмоток приводит к нарушению балансировки ротора.
7. Все рассмотренные варианты короткозамкнутых обмоток ротора способны порождать как синхронный, так и асинхронный моменты на валу электродвигателя. То есть предлагаемый электродвигатель является синхронно-асинхронным электродвигателем переменного тока при наличии одной и той же короткозамкнутой обмотки ротора.
Пуск предлагаемого электродвигателя для работы в синхронном режиме проводится с плавно нарастающей частотой вращения ротора через преобразователь, обеспечивающий фазные напряжения питания согласно (4) и (5). Или сразу включаются фазные напряжения питания рабочей частоты вращения, при этом сначала осуществляется асинхронный пуск электродвигателя до подсинхронной частоты вращения, а затем происходит автоматическое втягивание ротора в синхронный режим работы.
Пуск в асинхронном режиме практически не отличается от пуска обычного асинхронного электродвигателя.
8. Важным преимуществом предлагаемого электродвигателя является свойство его работы при однофазном включении в синхронном или асинхронном режиме. При этом предлагаемый электродвигатель переходит от режима вращения к торможению, остановке и фиксации короткозамкнутого ротора в неподвижном состоянии синхронным тормозным моментом, не требуя дополнительного механического тормоза. Такой электродвигатель особенно необходим для электропривода крановых механизмов, исполнительных механизмов роботов, систем автоматики и т.д.
9. Там, где на практике применяются асинхронные электродвигатели, предлагаемый электродвигатель может успешно использоваться как в асинхронном, так и в синхронном режиме на той же частоте вращения. Для его перехода из асинхронного в синхронный режим достаточно фазные напряжения питания фазных обмоток статора сделать прерывистыми согласно (4) или (5), т.е. одновременно включать и выключать фазные напряжения, например, с частотой в 3-5 раз выше частоты сети питания. В данном случае преобразователь напряжения заменяется простым прерывателем.
10. Авторами была принята за основу простая и надежная конструкция асинхронного электродвигателя с короткозамкнутой обмоткой ротора. При этом в предлагаемом электродвигателе могут использоваться статоры однотипных синхронных и асинхронных электродвигателей без изменений. А простота и надежность конструкции обеспечивается тем, что все варианты короткозамкнутых обмоток могут выполняться сварными, заливкой или литыми. Роторы, обмотки которых выполнены таким образом, могут работать в высокотемпературных средах до нескольких сот градусов, в агрессивных и токсичных средах и под водой.
Литература:
1. Вольдек А.И. Электрические машины. "Энергия", М.-Л., 1971.
2. Борисов Ю.М., Липатов Д.Н. Общая электротехника. "Высшая школа", М, 1974.
3. Уайт Д. и Вудсон Г. Электромеханическое преобразование энергии, "Энергия", М. - Л., 1964.
4. Бессонов Л.А. Теоретические основы электротехники. "Высшая школа", М. , 1984.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1996 |
|
RU2126196C1 |
| Способ формирования механической характеристики асинхронной машины с фазным ротором и бесколлекторная асинхронная машина на основе этого способа | 2016 |
|
RU2656884C2 |
| ВЫСОКОСКОРОСТНОЙ ГЕНЕРАТОР НА БАЗЕ ДВУХПОЛЮСНОЙ МАШИНЫ ДВОЙНОГО ПИТАНИЯ С ПРОМЕЖУТОЧНЫМ РОТОРОМ И КОНДЕНСАТОРНЫМ САМОВОЗБУЖДЕНИЕМ | 2012 |
|
RU2501147C1 |
| ДВУХФАЗНЫЙ АСИНХРОННЫЙ СВАРОЧНЫЙ ГЕНЕРАТОР | 2008 |
|
RU2404032C2 |
| СПОСОБ ОПТИМАЛЬНОГО ВЕКТОРНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402147C1 |
| ПРИВОД ЛИФТА | 2007 |
|
RU2359900C2 |
| СПОСОБ МОДЕРНИЗАЦИИ ТЯГОВОГО ЭЛЕКТРОПРИВОДА ПОСТОЯННОГО ТОКА | 2021 |
|
RU2785393C1 |
| СПОСОБ ФАЗОВОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2398349C1 |
| СПОСОБ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ РАБОТЫ АСИНХРОННОЙ КОРОТКОЗАМКНУТОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ И АСИНХРОННАЯ КОРОТКОЗАМКНУТАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА (ВАРИАНТЫ) | 2009 |
|
RU2393613C1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА НА ПЕРЕМЕННОМ ТОКЕ | 2012 |
|
RU2509002C2 |





Изобретение относится к области электротехники, а именно к универсальным бесконтактным электродвигателям переменного тока с плавным регулированием частоты вращения или скорости перемещения якоря. Сущность изобретения состоит в том, что синхронно-асинхронный электродвигатель с короткозамкнутой обмоткой ротора, содержащий также статор с фазными обмотками, согласно изобретению имеет вращательное или линейное выполнение. Ротор выполнен из пакета ферромагнитного материала, а витки и секции его короткозамкнутой обмотки выполнены параллельно или симметрично его продольной оси. При этом для напряжения питания фазных обмоток статора введено дополнительное амплитудное изменение, обеспечивающее передачу управляемой энергии из статора в ротор при синхронном режиме работы и определяющее частоту вращения. Технический результат от использования данного изобретения состоит в обеспечении плавного регулирования частоты вращения или скорости поступательного перемещения ротора предложенного электродвигателя в синхронном и асинхронном режимах работы в широком диапазоне, повышении КПД, а также расширении области использования данных электродвигателей. 1 з.п.ф-лы, 9 ил.
| Синхронно-асинхронный двигатель | 1955 |
|
SU103754A1 |
| Пусковая обмотка синхронного двигателя | 1961 |
|
SU141932A1 |
| Пусковая короткозамкнутая обмотка | 1961 |
|
SU143121A1 |
| Обмотка якоря трехфазной электрической машины переменного тока | 1973 |
|
SU487434A1 |
| Способ изготовления металлокерамических фрикционных дисков | 1960 |
|
SU140070A1 |
| US 4358712 A, 11.04.1981 | |||
| DE 3011428 A1, 10.03.1985. | |||

