Изобретение относится к области электротехники и может быть использовано для управления асинхронными двигателями с короткозамкнутым ротором, в том числе тяговыми, конкретно к системам регулируемого привода, в которых асинхронный двигатель питается от источника регулируемого напряжения, например автономного инвертора напряжения, матричного преобразователя, циклоконвертора и т.п. Такие источники позволяют реализовать любое желаемое напряжение и частоту питания двигателя с точностью до высокочастотной модуляционной составляющей.
Известны способы частотного управления асинхронными двигателями, в которых частота, или амплитуда и частота напряжения питания двигателя изменяются согласованно или раздельно, так, чтобы обеспечить требуемую частоту вращения ротора. Системы, реализующие способы частотного управления, просты в реализации и широко применяются в различных отраслях промышленности. Такие системы являются разомкнутыми (например, системы u/f=Const) или замкнутыми по частоте вращения, току двигателя, электромагнитному моменту и т.д. (см. книгу Г.Г.Соколовского: Электроприводы переменного тока с частотным регулированием. Учебник для ВУЗов. - М.: Издательский центр «Академия», 2006. - 272 стр., стр.137-145). Недостатками существующих разомкнутых систем являются ограниченный диапазон частоты вращения и невысокая точность регулирования частоты вращения ротора, зависимость частоты вращения ротора от нагрузки, невысокая перегрузочная способность. Недостатками существующих замкнутых систем частотного регулирования является невысокое быстродействие и склонность к возникновению колебаний (неустойчивости), особенно в нижней части диапазона регулирования частоты вращения. Такие системы зачастую не обеспечивают требуемого качества процессов регулирования в современных промышленных устройствах.
Известны способы векторного управления асинхронными двигателями, в которых регулирование механического движения (электромагнитного момента) и электромагнитной составляющей (магнитного потока) осуществляется раздельно, с помощью регулирования активной и намагничивающей компонент вектора тока, за счет соответствующего формирования напряжения питания (см. книгу В.В.Рудакова: Асинхронные электроприводы с векторным управлением. - Л.: Энергоатомиздат, 1987. - 134 стр., стр.79-80). Способы векторного управления позволяют получить предельное быстродействие и высокую точность регулирования, они хорошо зарекомендовали себя, например, в станкостроении; однако для реализации систем векторного управления необходима информация о направлении и величине магнитного поля в двигателе, для чего, как правило, используются модели электромагнитных процессов. Для удовлетворительной работы таких моделей требуется, во-первых, достоверная информация о параметрах двигателя, и, во-вторых, параметры двигателя не должны непредсказуемым образом изменяться в процессе работы. Поэтому в системах векторного управления обычно используются режимы работы двигателя с постоянным полем, при которых параметры модели поля изменяются незначительно; при изменении величины магнитного поля в двигателе, что характерно, например, для тягового двигателя, существующие модели без принятия специальных мер не работоспособны.
Наиболее близким к изобретению является способ управления асинхронным двигателем, заключающийся в том, что измеряют частоту вращения ротора асинхронного двигателя f3, вводят в регулятор напряжения разность между заданной и текущей частотами вращения ротора асинхронного двигателя, определяют частоту напряжения суммированием частоты вращения ротора асинхронного двигателя и оптимальной частотой скольжения; оптимальное скольжение определяют по формуле  , а величину напряжения асинхронного двигателя - по формуле
, а величину напряжения асинхронного двигателя - по формуле  , изменяют частоту и величину напряжения на асинхронном двигателе в соответствии с требуемыми значениями, где Mz - требуемый момент асинхронного двигателя; MN - номинальный момент двигателя; f1N - номинальная синхронная частота вращения двигателя; f2N - номинальная частота вращения двигателя (описание к патенту Российской Федерации на изобретение № 2294050 С2, опубл. 20.02.2007).
, изменяют частоту и величину напряжения на асинхронном двигателе в соответствии с требуемыми значениями, где Mz - требуемый момент асинхронного двигателя; MN - номинальный момент двигателя; f1N - номинальная синхронная частота вращения двигателя; f2N - номинальная частота вращения двигателя (описание к патенту Российской Федерации на изобретение № 2294050 С2, опубл. 20.02.2007).
Использование известного способа позволяет регулировать скорость вращения ротора двигателя в более широком диапазоне с коэффициентом мощности и перегрузочной способностью, близкими к номинальным значениям.
Недостатком известного способа является то, что вследствие неизбежных погрешностей в измерении частоты вращения ротора, которые, как правило, сопоставимы с величиной оптимальной частоты скольжения, частота напряжения питания двигателя, и, следовательно, электромагнитный момент устанавливаются с определенной ошибкой, которая, при относительно малой частоте скольжения, может даже приводить к противоположному знаку реализуемого электромагнитного момента. Увеличение частоты скольжения по сравнению с оптимальной позволяет сохранить работоспособность привода с частотным управлением, однако приводит к снижению КПД привода, что недопустимо в приводах, в которых КПД является основным критерием качества работы привода, в частности в тяговом приводе.
Техническим результатом, который обеспечивается изобретением, является расширение диапазона устойчивой работы простых в реализации систем вплоть до нулевых частот вращения, повышение точности регулирования и сохранение перегрузочной способности двигателя во всем диапазоне частот вращения, повышение КПД привода.
Указанный технический результат обеспечивается тем, что в способе управления асинхронным двигателем с короткозамкнутым ротором, питаемым от силового преобразователя, заключающемся в том, что в каждый момент времени измеряют или определяют частоту вращения ротора f3, задают частоту вращения ротора fz, а также электромагнитный момент Mz, определяют величину амплитуды напряжения питания обмоток статора асинхронного двигателя, требуемую для обеспечения заданного электромагнитного момента Mz при текущем значении частоты вращения ротора f3, дополнительно измеряют угол поворота ротора, определяют соответствующий углу поворота ротора электрический угол на интервале 0÷2π, задают частоту скольжения, одинаковую по знаку с заданным электромагнитным моментом Mz, определяют величину фазы скольжения, интегрируя частоту скольжения на интервале 0÷2π, определяют величину фазы напряжения питания обмоток статора асинхронного двигателя как сумму величины фазы скольжения и величины измеренного электрического угла поворота ротора, формируют с помощью силового преобразователя определенные выше амплитуду и фазу напряжения питания обмоток статора асинхронного двигателя.
Сигнал, соответствующий заданному электромагнитному моменту Mz, может быть получен на выходе ПИ-регулятора, на разностные входы которого подают сигналы, соответствующие заданной fz и измеренной f3 частоте вращения ротора.
Фаза напряжения питания двигателя ϕ определяется как сумма измеряемого датчиком угла поворота ротора и угла скольжения:
ϕ=ϕ3+ϕs
Амплитуда U напряжения питания обмоток статора асинхронного двигателя может быть определена по формуле

где U - амплитуда напряжения, В; Ls, Lr,Lh - индуктивности обмотки статора, обмотки ротора и взаимоиндуктивность обмоток статора и ротора соответственно, Гн; Rs, Rr - активные сопротивления обмоток статора и ротора соответственно, Ом; f3 - частота вращения, сек-1, fs - частота скольжения, сек-1 (амплитуда напряжения приведена в переменных обобщенной электрической машины; фазные напряжения реального двигателя f1… fn в данный момент времени равны проекциям обобщенного вектора напряжения на направляющие орты фаз).
Частота скольжения может быть определена по формуле fS=Rr/Lr, где Rr и Lr - активное сопротивление и индуктивность обмотки ротора соответственно, или по формуле fS=Mz(f1H-f2H)/МH, где МH - номинальный электромагнитный момент асинхронного двигателя, Нм; f1H - номинальная синхронная частота вращения асинхронного двигателя, сек-1; f2H - номинальная частота вращения асинхронного двигателя, сек-1.
Согласно изобретению управление двигателем осуществляется не частотой и амплитудой напряжения питания двигателя, как в прототипе, а его фазой и амплитудой одновременно.
Отличием фазового регулирования от существующих систем частотного регулирования является то, что фазовый угол напряжения питания определяется как сумма измеряемого датчиком угла поворота ротора ϕ3 и угла скольжения ϕs. Это означает, что в системе управления используется обратная связь по фазовому углу поворота ротора (фазовый угол питающего напряжения формируется как сумма фазового угла поворота ротора и фазового угла скольжения).
Способ фазового управления асинхронным двигателем поясняется на примере работы устройства фазового управления асинхронным двигателем, изображенного на чертеже.
Устройство фазового управления асинхронным двигателем состоит из силового преобразователя 1, датчика 2 угла поворота ϕ3 и частоты вращения f3 ротора, задатчика частоты скольжения 3, интегратора 4, сумматора 5, регулятора частоты вращения 6, функционального преобразователя 7, блока модуляции 8 сигналов управления силовым преобразователем 1, питающим асинхронный двигатель 9 с короткозамкнутым ротором.
Разностные входы регулятора частоты вращения 6 (выполненного, например, в виде ПИ-регулятора) подключены к выходу f3 датчика 2 угла поворота ϕ3 и частоты вращения f3 ротора и задатчику частоты вращения f2z ротора.
В качестве датчика 2 угла поворота ϕ3 и частоты вращения f3 ротора может использоваться кодовый, аналоговый или импульсный датчики углового положения или перемещения (энкодер); отсутствие абсолютного измерения углового положения ротора не принципиально, поскольку начальное значение углового положения не имеет значения для формирования требуемого электромагнитного момента асинхронного двигателя.
Выход регулятора частоты вращения 6 соединен со входом функционального преобразователя 7, выход которого подключен ко входу задания амплитуды напряжения питания обмоток статора асинхронного двигателя блока модуляции 8.
Выход задатчика частоты скольжения 3 через интегратор 4 подключен к одному из входов сумматора 5, другой вход которого присоединен к выходу ϕ3 датчика 2 угла поворота ϕ3 и частоты вращения f3 ротора, выход ко входу задания фазы напряжения питания обмоток статора асинхронного двигателя блока модуляции 8.
Выходы f1…fn блока модуляции 8, равные фазным напряжениям питания двигателя, соединены со входами силового преобразователя 1.
Предлагаемый способ реализуется следующим образом.
Задают величину частоты вращения ротора fz, а также величину частоты скольжения fs, одинаковую по знаку с требуемым электромагнитным моментом Mz. Частота скольжения формируется задатчиком частоты скольжения 3, равной fS=Rr/Lr, где Rr и Lr - активное сопротивление и индуктивность обмотки ротора соответственно. Ом и Гн.
В каждый момент времени датчиком 2 угла поворота ϕ3 и частоты вращения f3 ротора измеряют угол поворота ротора, измеряют или определяют частоту вращения ротора f3, определяют соответствующий углу поворота ротора электрический угол на интервале 0÷2π.
Частоту скольжения fs интегрируют блоком 4 на интервале 0÷2π, и получают фазовый угол скольжения ϕs Фаза напряжения питания двигателя ϕ определяется как сумма измеряемого датчиком 2 угла поворота ϕ3, и угла скольжения: ϕ=ϕ3+ϕs.
Регулятор частоты вращения 3 (ПИ-регулятор частоты вращения) формирует сигнал заданного электромагнитного момента Mz, по которому функциональный преобразователь 7 формирует требуемое значение амплитуды напряжения питания двигателя U.
Повышение КПД двигателя возможно за счет формирования соответствующего режима его работы, а именно формирования оптимального соотношения между изменениями фазы и амплитуды напряжения питания, позволяющего, при данном (текущем) значении развиваемого момента, минимизировать потери энергии в двигателе. Для этого значение частоты скольжения fs формируется, как известно из теории частотного управления (см. А.А.Булгаков Частотное управление асинхронными двигателями. М. Энергоиздат, 1982 г. 216 стр., стр.51-78), в отличие от прототипа, постоянным по величине и равным оптимальному по потерям в двигателе, fs=fsопт. Значение fsопт определяется теоретически (fsопт=Rr/Lr) или экспериментально.
Возможно формирование значение частоты скольжения fS, как fS=Mz(f1H-f2н)/МH, где Mz - заданный электромагнитный момент асинхронного двигателя, Нм; МH - номинальный электромагнитный момент асинхронного двигателя, Нм; f1H - номинальная синхронная частота вращения асинхронного двигателя, сек-1; f2H - номинальная частота вращения асинхронного двигателя, сек-1.
Значение амплитуды напряжения формируется таким образом, чтобы реализовать требуемый электромагнитный момент двигателя Mz. Значение амплитуды напряжения U, при текущих значениях момента двигателя Mz, частоты скольжения fs=fsопт и частоты вращения ротора f3 определяется как

где:
U - амплитуда напряжения, В;
Ls, Lr, Lh - индуктивности обмотки статора, обмотки ротора и взаимоиндуктивность обмоток статора и ротора соответственно, Гн;
Rs, Rr - активные сопротивления обмоток статора и ротора, соответственно. Ом;
f3 - частота вращения, сек-1;
fs - частота скольжения, сек-1.
С помощью силового преобразователя 1 формируют определенные выше амплитуду и фазу напряжения питания обмоток статора асинхронного двигателя.
Использование датчика угла поворота ротора (датчика углового положения) позволяет избежать неизбежных погрешностей в измерении частоты вращения ротора и, следовательно, погрешностей в формировании частоты питания двигателя. Это позволяет реализовать сколь угодно малые значения частоты скольжения, требуемые для формирования режима работы двигателя.
Формирование частоты скольжения и амплитуды в терминах параметров схемы замещения фазы асинхронного двигателя, а не в терминах номинальных значений частот вращения, моментов, и скольжений для тягового привода представляется естественным, поскольку само понятие номинального режима для тяговых приводов затруднительно.
Системы фазового регулирования сохраняют простоту систем частотного регулирования, а их относительно невысокое быстродействие во многих случаях не является препятствием, например в тяговом приводе вследствие относительной медленности процессов изменения движения транспортного средства. Системы фазового управления реализуются на цифровых управляющих устройствах, в частности на современных специализированных микропроцессорных контроллерах.
Изобретение относится к области электротехники. Техническим результатом является расширение диапазона устойчивой работы простых в реализации систем вплоть до нулевых частот вращения, повышение точности регулирования и сохранение перегрузочной способности двигателя во всем диапазоне частот вращения, повышение КПД привода. Для этого в способе управления асинхронным двигателем с короткозамкнутым ротором, питаемым от силового преобразователя, в каждый момент времени измеряют или определяют частоту вращения ротора f3, задают частоту вращения ротора fz, а также электромагнитный момент Mz, определяют величину амплитуды напряжения питания обмоток статора асинхронного двигателя, требуемую для обеспечения заданного электромагнитного момента Mz при текущем значении частоты вращения ротора f3, дополнительно измеряют угол поворота ротора, определяют соответствующий углу поворота ротора электрический угол на интервале 0÷2π, задают частоту скольжения, одинаковую по знаку с заданным электромагнитным моментом Mz, определяют величину фазы скольжения, интегрируя частоту скольжения на интервале 0÷2π, определяют величину фазы напряжения питания обмоток статора асинхронного двигателя как сумму величины фазы скольжения и величины измеренного электрического угла поворота ротора, формируют с помощью силового преобразователя определенные выше амплитуду и фазу напряжения питания обмоток статора асинхронного двигателя. 3 з.п. ф-лы, 1 ил.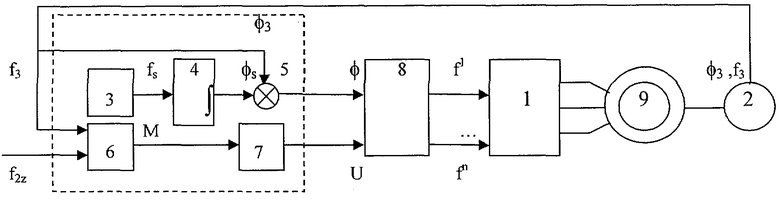
1. Способ управления асинхронным двигателем с короткозамкнутым ротором, питаемым от силового преобразователя, заключающийся в том, что в каждый момент времени измеряют угол поворота ротора, измеряют или определяют частоту вращения ротора f3, определяют соответствующий углу поворота ротора электрический угол на интервале 0÷2π, задают частоту вращения ротора fz, а также одинаковые по знаку электромагнитный момент Mz и частоту скольжения, определяют величину фазы скольжения, интегрируя частоту скольжения на интервале 0÷2π, определяют величину амплитуды напряжения питания обмоток статора асинхронного двигателя, требуемую для обеспечения заданного электромагнитного момента Mz при текущем значении частоты вращения ротора f3 по формуле

определяют величину фазы напряжения питания обмоток статора асинхронного двигателя как сумму величины фазы скольжения и величины измеренного электрического угла поворота ротора, формируют с помощью силового преобразователя определенные выше амплитуду и фазу напряжения питания обмоток статора асинхронного двигателя, где
U - амплитуда напряжения, В;
Ls, Lr, Lh - индуктивности обмотки статора, обмотки ротора и взаимоиндуктивность обмоток статора и ротора соответственно, Гн;
Rs, Rr - активные сопротивления обмоток статора и ротора соответственно, Ом;
f3 - частота вращения, с-1;
fs - частота скольжения, с-1.
2. Способ управления асинхронным двигателем по п.1, отличающийся тем, что сигнал, соответствующий заданному электромагнитному моменту Mz, получают на выходе ПИ-регулятора, на разностные входы которого подают сигналы, соответствующие заданной fz и измеренной f3 частоте вращения ротора.
3. Способ управления асинхронным двигателем по п.1, отличающийся тем, что частоту скольжения определяют по формуле fs=Rr/Lr.
4. Способ управления асинхронным двигателем по п.1, отличающийся тем, что заданную частоту скольжения определяют по формуле fs=Mz(f1H-f2H)/MH, где
МН - номинальный электромагнитный момент асинхронного двигателя, Нм;
f1H - номинальная синхронная частота вращения асинхронного двигателя, с-1;
f2H - номинальная частота вращения асинхронного двигателя, с-1.
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2005 |
|
RU2294050C2 |
| СПОСОБ ФАЗОВОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ТИРИСТОРНЫМ РЕГУЛЯТОРОМ НАПРЯЖЕНИЯ | 1990 |
|
RU2014721C1 |
| СПОСОБ ПЛАВНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2003 |
|
RU2256285C1 |
| СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ВРАЩАЮЩЕГО МОМЕНТА ЭЛЕКТРОДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2002 |
|
RU2243572C2 |
| Способ управления асинхронным электродвигателем и устройство для его осуществления | 1981 |
|
SU1443110A1 |

