Изобретение относится к области электроэнергетики и может быть использовано в системах электромеханического преобразования энергии, а именно в асинхронных машинах.
Известна асинхронная машина с фазным ротором, содержащая статор с трехфазной симметричной обмоткой и ротор с трехфазной симметричной обмоткой, имеющей выводы на вращающиеся кольца и щеточный узел, предназначенные для присоединения внешних регулируемых сопротивлений, формирующих семейство искусственных механических характеристик (Патент Великобритании №20425 от 15 декабря 1890).
Недостатками указанной машины являются сложность конструкции, большие габариты машины и регулировочных сопротивлений, коммутационных аппаратов, а также пониженная надежность.
Наиболее близким к предлагаемому решению является способ формирования механической характеристики асинхронного электродвигателя с фазным ротором, подразумевающий включение в каждую фазу ротора посредством контактных колец и щеточного узла, расположенных вне машины индуктивностей (дросселей или реакторов) с автоматическим изменением их сопротивления в зависимости от частоты протекающего тока, определяемой частотой ЭДС, равной частоте скольжения. При этом обеспечивается плавность регулирования и поддержание вращающего момента на уровне максимального при уменьшении скорости вращения и перегрузках. ("Электрические машины: Асинхронные машины.: Учебник для электромех. спец. вузов. Под ред. И.П. Копылова - М.: Высш. школа, 1988, с. 127").
Недостатком этого способа являются большие габариты и низкая надежность как самой машины с кольцами и щеточным узлом, так и регулировочных дросселей, мощность которых должна быть сопоставима с мощностью машины.
Целью предлагаемого решения является создание бесщеточной асинхронной электрической машины с фазным ротором, в которой происходит автоматическое формирование оптимальной механической характеристики на всех режимах без применения реостатов, дросселей, коммутационной аппаратуры, а также каких-либо электронных устройств.
Поставленная цель достигается использованием сопротивления самих фазных обмоток ротора, меняющегося в зависимости от частоты скольжения. При этом с целью расширения диапазона изменения сопротивления фазной обмотки снижают магнитный поток в области образования максимальной ЭДС стержней ротора, а с целью получения максимального взаимодействия статора и ротора, для доведения момента на валу Ms до значения Mmax, ротор дополнительно намагничивают за счет образования дополнительных полюсов ротора, поле которых согласно с полем статора.
Формирование механической характеристики осуществляется с помощью нагрузочных сопротивлений фаз, образованных в роторе машины в виде стержней или витков, составляющих стержни обмотки ротора, число которых равно половине числа пазов Z2/2, вторая половина стержней или витков, составляющих стержни, представляет собой индукторы ЭДС. Индукторные и нагрузочные стержни соединены попарно, образуя отдельные контуры-рамки. Полные сопротивления рамок определяются частотой индуцируемой ЭДС, которая изменяется от частоты питающей сети практически до нуля в двигательном режиме и от нуля до частоты питающей сети и выше при работе в генераторном режиме (частота скольжения S).
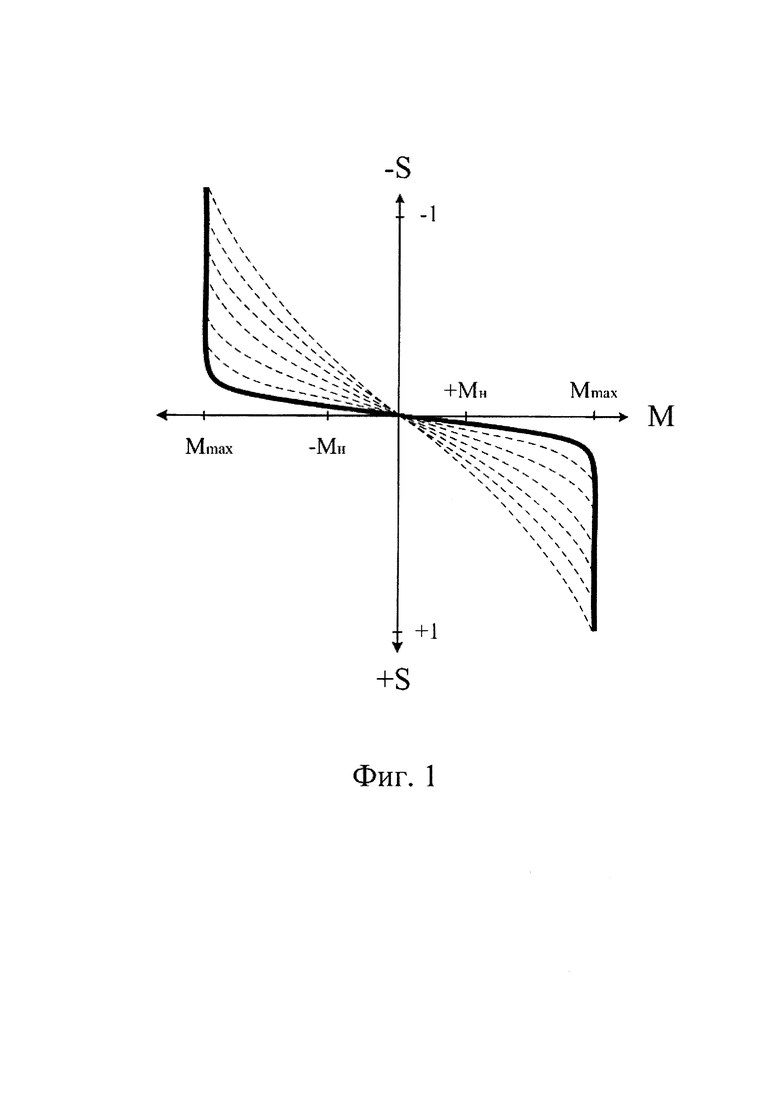
При таком изменении частоты полное сопротивление рамок плавно изменяется в десятки раз, обеспечивая плавное изменение частоты вращения в зависимости от нагрузки, режимов работы (генераторный или двигательный) и других факторов. Причем при изменении сопротивления рамок до достижения перегибов механической характеристики обеспечивается равенство Ms моменту Mmax.
Технический результат предложенного способа и созданной на его основе машины заключается в том, что механическая характеристика в переходных режимах формируется автоматически и до точек перегибов обеспечивается равенство текущих моментов Ms максимальному моменту Mmax.
Конструкция машины по сравнению с прототипом упрощается за счет исключения контактных колец и щеточного узла, уменьшаются габариты, повышается надежность.
Указанный технический результат достигается за счет того, что подведенная к статору машины энергия переменного тока создает в нем первичное вращающееся магнитное поле, которое благодаря индукторной связи с ротором наводит в его фазных генераторных стержнях обмотки ЭДС, вызывающую электрический ток в нагрузочных стержнях фазы, не имеющих собственной наведенной ЭДС. Нагрузочные стержни, соединенные с генераторными стержнями, образуют отдельные фазы и меняют свое реактивное сопротивление в зависимости от частоты наведенной ЭДС. Кроме того, нагрузочные стержни формируют продольное первичному (статорному) магнитное поле, обеспечивая тем самым максимальное взаимодействие первичного и вторичного полей, для установления максимального момента на валу во всем диапазоне скольжений. По этой причине ток в роторе всегда снижен и никогда не достигает значений тока короткого замыкания, благодаря чему ослабляется поперечная составляющая вторичного магнитного поля, особенно на пуске и в перегрузочных режимах. Такое ослабление магнитного поля снижает насыщенность стали пакета, улучшая условия возбуждения в генераторном режиме, а также улучшает условия саморегулирования.
На Фиг. 1 изображена механическая характеристика машины с пунктирным наложением семейства частных характеристик для переходных точек при разгоне машины в двигательном режиме и торможении в генераторном режиме.
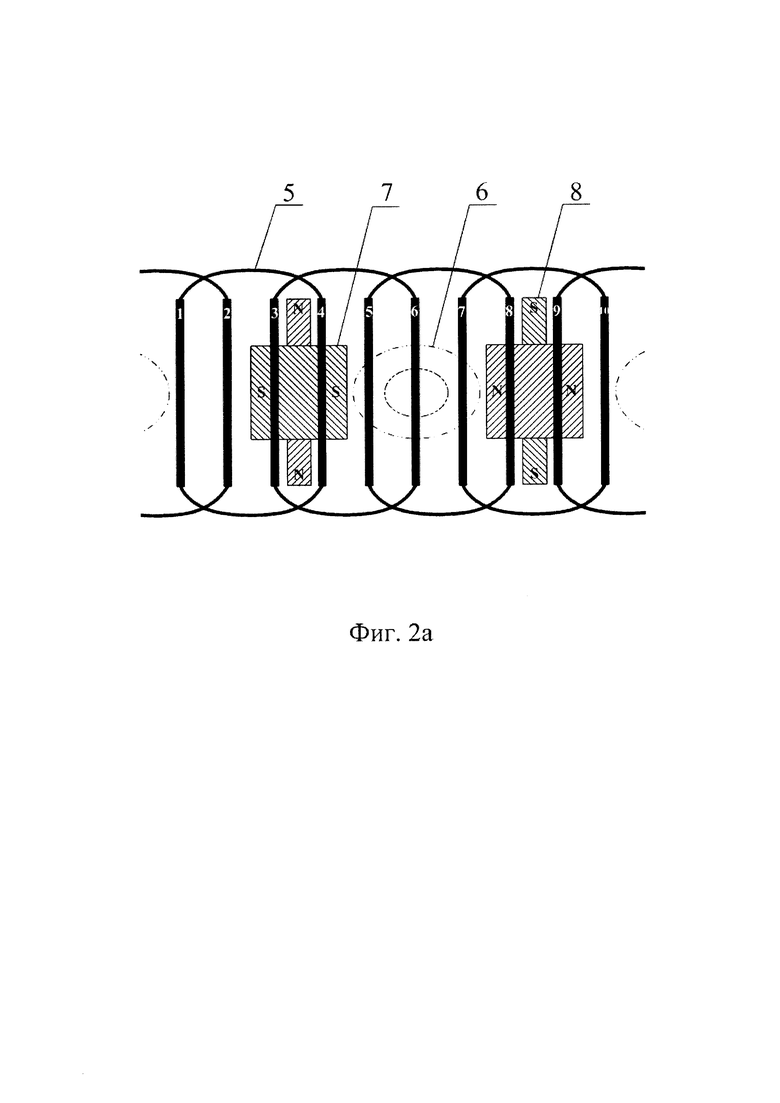
На Фиг. 2а, Фиг. 2б изображен пример схемы соединения стержней ротора двухполюсной машины с 10 пазами на фоне магнитных полюсов статора и дополнительных полюсов ротора.
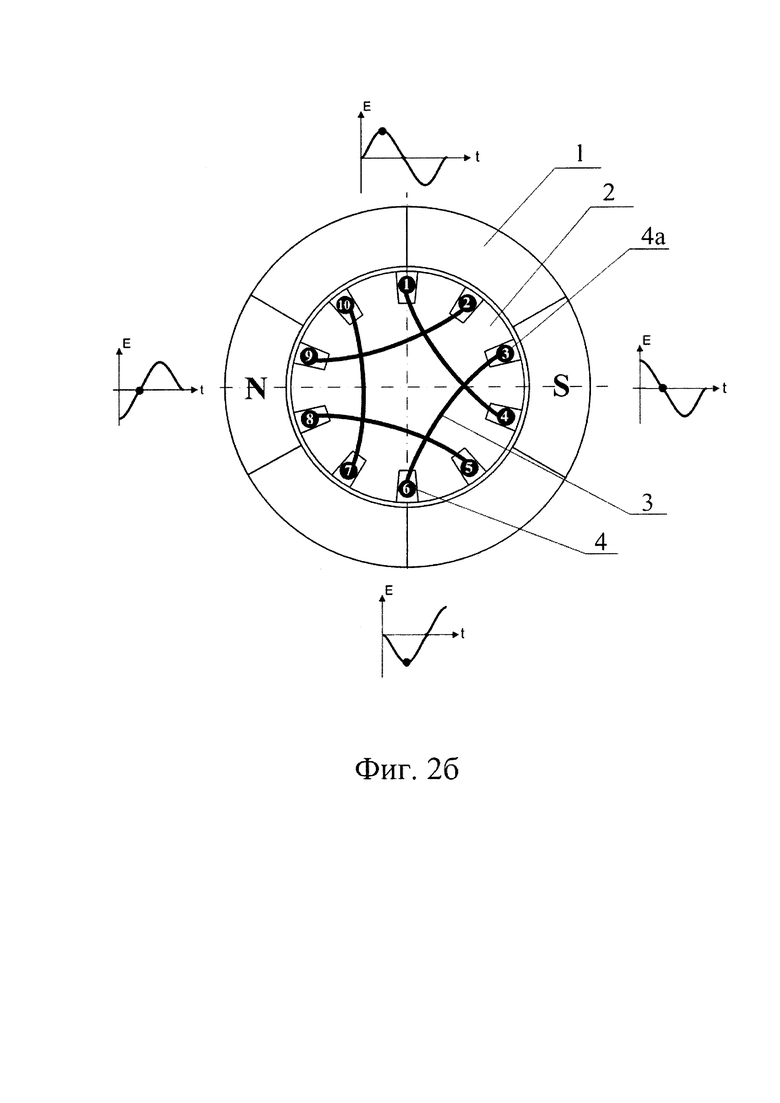
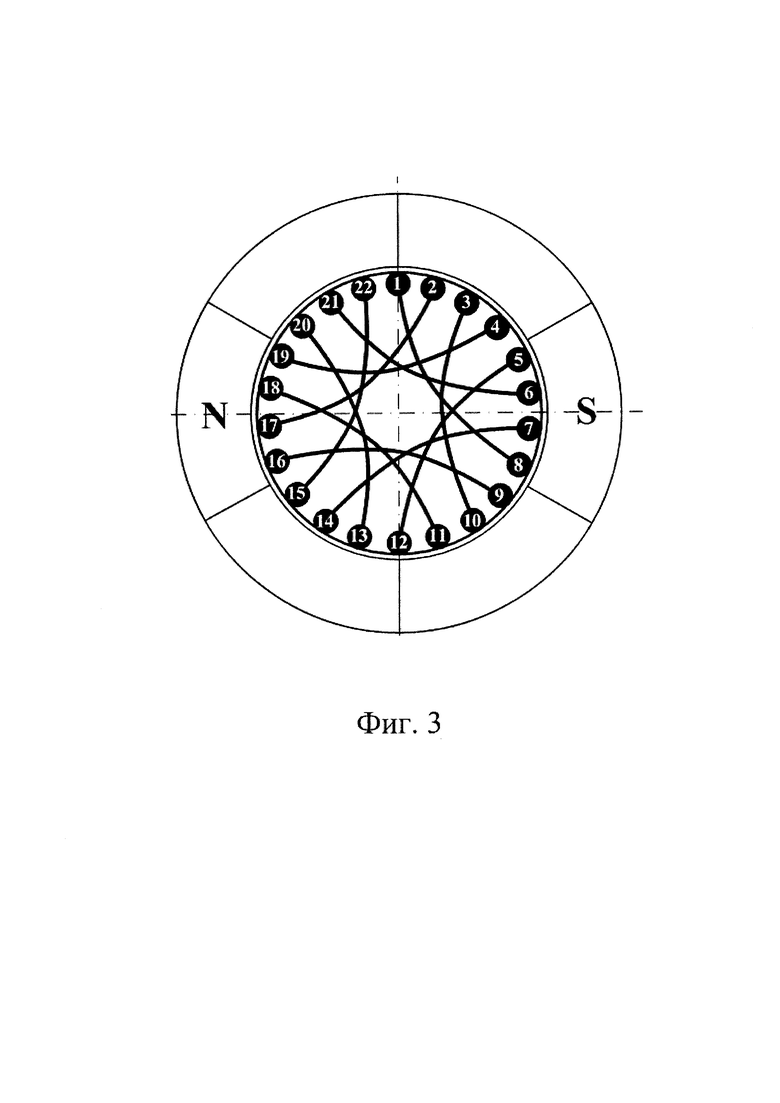
На Фиг. 3 изображен пример схемы соединения стержней на лобовых частях ротора двухполюсной машины с 22 пазами.
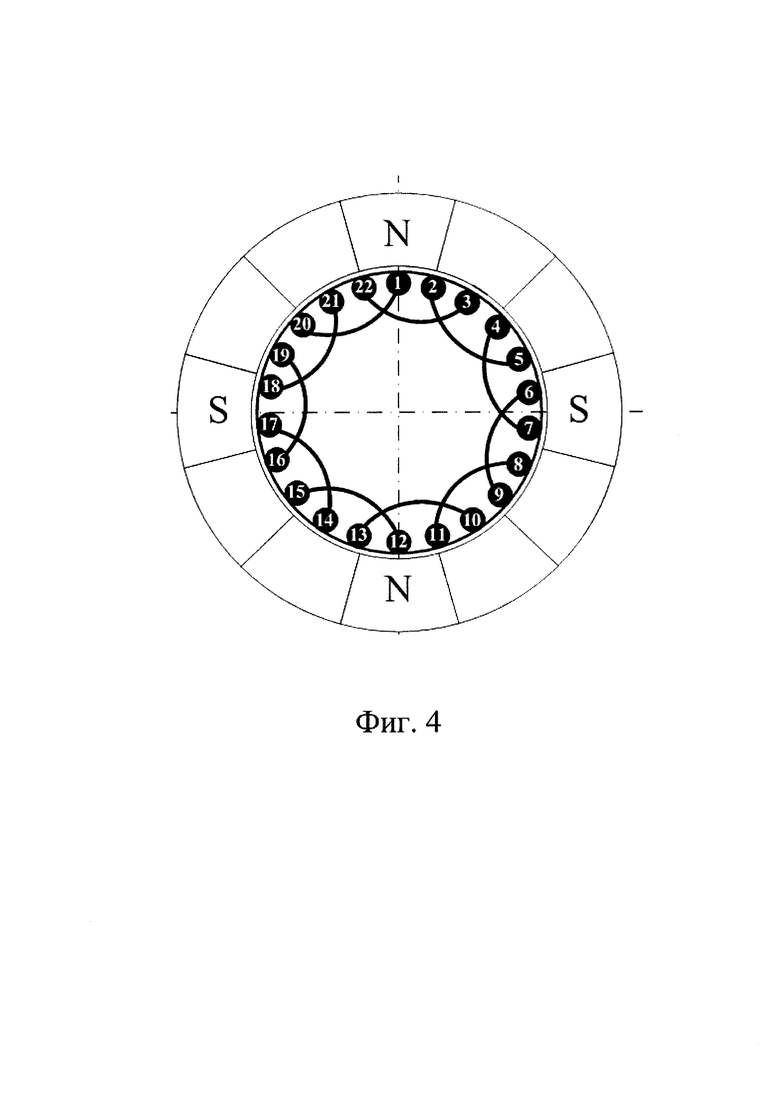
На Фиг. 4 изображен пример схемы соединения стержней на лобовых частях ротора четырехполюсной машины с 22 пазами.
Конструктивное исполнение, показанное на Фиг. 2а и Фиг. 2б по заявляемому способу, представляет собой асинхронную машину с фазным ротором, содержащую статор с трехфазной симметричной обмоткой 1 и ротор 2 с однослойной обмоткой. Каждая из фаз 3, количество которых равно Z2/2, представляет собой два стержня 4, 4а, выполненных в виде одиночных массивных стержней или нескольких проводников, образующих единый стержень. Один из стержней является генераторным 4, а второй - нагрузочным 4а. Стержни соединены между собой перемычками 5 и образуют фазные рамки 3. Рамки устанавливаются на роторе машины с любым числом пар полюсов статора и любым четным количеством пазов ротора, причем генераторные стержни рамок располагаются в зоне максимума 6 (Фиг. 2) индуцируемой статором ЭДС, а нагрузочные в зоне минимума 7 так, чтобы образовать на роторе новые магнитные полюса 8 с полем, параллельным первичному полю статора 7, усиливая тем самым поле на ограниченном участке ротора, противостоящем первичному полю статора с целью доведения текущего момента Ms до значений максимального Mmax и выше во всем диапазоне изменения скольжения.
Машина работает следующим образом.
При включении в сеть переменного тока с чередованием фаз через обмотки статора начинают протекать токи, создающие вращающееся магнитное поле. Магнитное поле статора имеет ярко выраженную полюсную структуру в местах размещения частей обмотки с максимумом тока и с отсутствием поля в местах размещения обмоток со значениями тока, равными нулю при переходе сетевого напряжения через ноль. В этой области магнитное поле меняет свою полярность. Противостоящие этой области статора стержни ротора оказываются под воздействием интенсивно меняющегося поля, что приводит к индуцированию в них максимума ЭДС. А стержни, которые расположены в области под полюсами со слабым изменением поля, имеют минимальную наведенную ЭДС. Благодаря тому, что первые стержни играют роль генераторов ЭДС и соединены в рамки со стержнями без ЭДС, играющими роль нагрузочных, в рамках начинает протекать ток, определяемый полным сопротивлением рамки на частоте сети. Причем каждая из рамок образует отдельную фазу ротора с частотой тока, равной частоте питающей сети у неподвижной машины. Последовательное соединение генераторного и нагрузочного стержней ослабляет протекающий в рамке ток за счет введенного второго стержня без ЭДС, и результирующее поле каждой рамки оказывается ослабленным. Ослабленное магнитное поле приводит к квадратичному увеличению магнитной проницаемости стали пакета и такому же увеличению сопротивления рамки. Однако рамки разных фаз со стороны нагрузочных стержней перекрывают друг друга, благодаря чему часть ротора, противостоящая магнитному полюсу статора, дополнительно намагничивается, что обеспечивает формирование полюсов ротора, противостоящих полюсам статора и, в конечном итоге, увеличивает силы магнитного взаимодействия между полями ротора и статора до уровня Mmax. Вращающееся первичное поле захватывает вторичное и увлекает ротор в сторону вращения первичного поля. Ротор начинает вращение при максимальных значениях сопротивления рамок, так как у неподвижной машины сопротивление рамки определяется частотой ЭДС, равной частоте питающей сети. Когда ротор начинает вращаться, частота индуцированной ЭДС снижается и в рамках действует разностная частота, называемая частотой скольжения. Сопротивление рамок плавно уменьшается пропорционально частоте скольжения во всем диапазоне переходного режима от момента включения до выхода на установившийся режим. Вращающий момент Ms при этом всегда близок к максимальному до перегиба характеристики на естественном для машины максимальном моменте.
Далее работа машины осуществляется на естественной характеристике вплоть до подсинхронной скорости без нагрузки (режим холостого хода). Частота ЭДС генераторных стержней приближается к нулю, и сопротивление рамок приближается к значению только активной составляющей.
При подведении к валу внешнего вращающего момента, согласного с вращением машины, частота вращения вала возрастает и преодолевает синхронную. При этом частота ЭДС в стержнях переходит через ноль и вновь увеличивается. Машина начинает создавать тормозной момент внешнему источнику механической мощности, а дополнительные полюса ротора начинают намагничивать статор, благодаря чему ЭДС на статорных обмотках увеличивается и возникает ток передачи электрической мощности от машины в сеть. Машина переходит в генераторный режим. При этом частота ЭДС в рамках всегда будет равна разностной частоте, т.е. частоте скольжения, благодаря чему в сеть будет отдаваться только синхронная с сетью энергия, а для возбуждения машина будет расходовать опережающую энергию от сети. Тормозной момент для этих режимов также будет поддерживаться автоматически на уровне близком к моменту максимальному.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ РАБОТЫ АСИНХРОННОЙ КОРОТКОЗАМКНУТОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ И АСИНХРОННАЯ КОРОТКОЗАМКНУТАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА (ВАРИАНТЫ) | 2009 |
|
RU2393613C1 |
| СПОСОБ НАГРУЗКИ СИНХРОННЫХ МАШИН | 2012 |
|
RU2530876C2 |
| Совмещенная асинхронная машина | 1978 |
|
SU799082A1 |
| СПОСОБ ПУСКА И БЕСЩЕТОЧНОГО ВОЗБУЖДЕНИЯ БЕСКОНТАКТНОЙ СИНХРОННОЙ МАШИНЫ | 2012 |
|
RU2498491C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ПОГРУЖНЫХ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2011 |
|
RU2463612C1 |
| СПОСОБ ИЗМЕРЕНИЯ НАМАГНИЧИВАЮЩЕГО ТОКА АСИНХРОННОГО ДВИГАТЕЛЯ С ФАЗНЫМ РОТОРОМ, РАБОТАЮЩЕГО ПОД НАГРУЗКОЙ | 2014 |
|
RU2566394C2 |
| Ротор асинхронной электрической машины | 2020 |
|
RU2747273C1 |
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1998 |
|
RU2139622C1 |
| Асинхронно-синхронный бесконтактный преобразователь частоты | 1981 |
|
SU1094116A1 |
| АСИНХРОННЫЙ РЕГУЛИРУЕМЫЙ ДВИГАТЕЛЬ | 1990 |
|
RU2031516C1 |
Изобретение относится к области электротехники и может быть использовано в системах электромеханического преобразования энергии, а именно в асинхронных машинах. Техническим результатом является автоматическое формирование оптимальной механической характеристики на всех режимах без применения реостатов, дросселей, реакторов, коммутационной аппаратуры, а также каких-либо электронных устройств. В способе формирования механической характеристики асинхронной машины с фазным ротором области ротора, прилегающие к областям с максимальным изменением поля статора, размагничивают, а области ротора, прилегающие к областям с минимальным изменением поля статора, дополнительно намагничивают путем создания дополнительных полюсов. 2 н.п. ф-лы, 5 ил.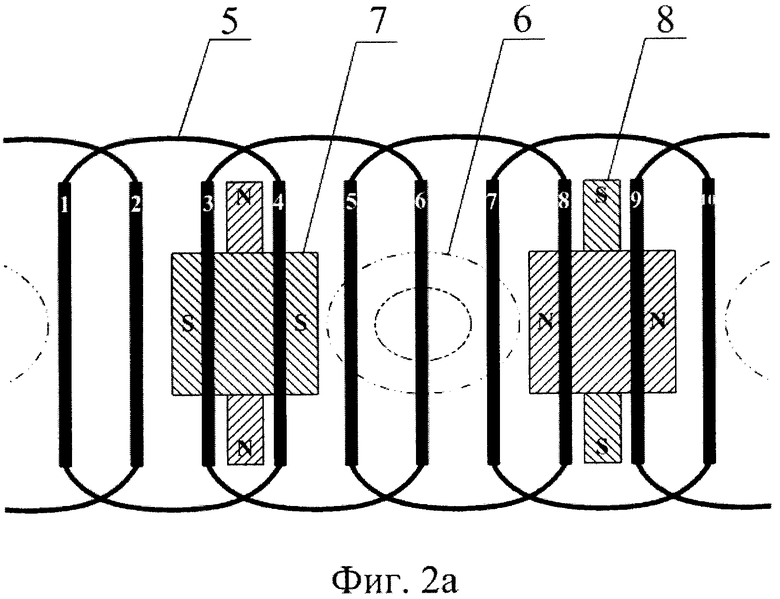
1. Способ формирования механической характеристики бесщеточной асинхронной машины с фазным ротором по п. 2, заключающийся в изменении сопротивления фазных обмоток ротора, отличающийся тем, что с целью автоматического регулирования сопротивления фазной обмотки в переходных режимах для обеспечения максимального момента во всех точках характеристики, области ротора, прилегающие к областям с максимальным изменением поля статора, размагничивают, а области ротора, прилегающие к областям с минимальным изменением поля статора, дополнительно намагничивают путем создания дополнительных полюсов.
2. Асинхронная бесщеточная машина, содержащая статор с трехфазной симметричной обмоткой и ротор с однослойной обмоткой, отличающаяся тем, что обмотка ротора выполнена в виде одиночных массивных стержней или нескольких проводников, образующих единый стержень, концы стержней соединены проводниками попарно в рамки и образуют отдельные фазы ротора, число которых равно половине любого четного числа пазов ротора, причем в каждой паре один из стержней, находясь в зоне максимума индуцируемой эдс, является источником эдс, а второй стержень, находясь в зоне минимума индуцируемой эдс, является нагрузочным сопротивлением, а каждый нагрузочный стержень одной фазы совместно с нагрузочными стержнями других фаз образуют дополнительные полюса с магнитным потоком, параллельным первичному полю статора для любого числа пар полюсов статора.
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК АСИНХРОННОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2143121C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ И РАБОЧИХ ХАРАКТЕРИСТИК АСИНХРОННОГО ДВИГАТЕЛЯ БЕЗ СОПРЯЖЕНИЯ С НАГРУЗОЧНЫМ УСТРОЙСТВОМ | 2008 |
|
RU2391680C1 |
| ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1996 |
|
RU2103785C1 |
| КОРОТКОЗАМКНУТЫЙ РОТОР С ПУСКОВЫМ СТЕРЖНЕМ | 2010 |
|
RU2552384C2 |
| НОВЫЕ ПРОИЗВОДНЫЕ ГИДРОКСАМОВОЙ КИСЛОТЫ, ПОЛЕЗНЫЕ ДЛЯ ЛЕЧЕНИЯ ЗАБОЛЕВАНИЙ, СВЯЗАННЫХ С ДЕГЕНЕРАЦИЕЙ СОЕДИНИТЕЛЬНОЙ ТКАНИ | 1997 |
|
RU2168497C2 |
| JPH 10234166 A, 02.09.1998 | |||
| US 6619300 A1, 01.05.1996 | |||
| Сиденье транспортного средства | 1977 |
|
SU698795A1 |
| CN 104090236 A, 08.10.2014. | |||

