Изобретение относится к кабельной технике, о частности к устройствам для транспортирования контейнеров с кабельными жилами разных типов от автоматических линий по производству зтих хсил на промежуточный склад-накопитель и далее на последующую технологическую операцию по производству кабельного изделия.
Для механизации и автоматизации погрузочно-разгрузочных работ применяются роботы управляемые от управляющих вычислительньгх машин (УВМ). Известно устройство, содержащее адаптивный робот, управляемый от УВМ, и позволяющее визуально распознавать движущиеся по конвейеру объекты и подавать через УВМ команды
на исполнительные механизмы для управления дальнейшим перемещением объектов. Однако это устройство не способно различать однотипные по форме объекты с разными типами жил, например, по цвету изоляции.
Известны устройства для управления робототехническим комплексом, содержащие пульт программного управления, роботы, логические блоки, блоки управления роботами. В этих устройствах роботы осуществляют погрузочно-разгрузочные работы над изделиями без учета отдельных параметров погрузочно-разгрузочных мест и параметров самого изделия.
Указанные устройства не позволяют решить задачу упорядоченного размещения контейнеров на технологическом участке в зависимости от параметров телефонной жилы.
Наиболее близким по технической сущности к предлагаемому является устройство, содержащее датчик наличия контейнера и датчик адреса места контейнера на конвейере, блок управления разгрузкой конвейера, блок исполнительных механизр ов загрузочного робота, блок ячеек памяти характеристик секции, блок управления загрузкой склада, грулпав информационных входов которого подключена к информационным выходам блока ячеек памяти характеристик секции, блок исполнительных механизмов разгрузочного робота, блок управления разгрузкой склада, группа информационных входов которого соединена с соответствующей группой информационных выходов блока ячеек памяти характеристик секции, блок управления загрузкой мест отдатчиков, первый и второй задающие входы блока разгрузки конвейера подключены соответственно к выходам задатчика адреса места контейнера на конвейере и датчика наличия контейнера, первый и второй управляющие выходы блока управления загрузкой склада подключены соответственно к первому и второму управляющим входам блока исполнительных механизмов загрузочного робота, а первый, второй и третий информационные входы - к соответствующим выходам блока исполнительных механизмов загрузочного робота, группа информационных выходов которого соединена с группой информационных входов блока управления загрузкой склада, вход сброса которого подключен к первому управляющему выходу блока управления разгрузкой конвейера, первый и второй управляющие выходы блока исполнительных механизмов разгрузочного робота подключены соответственно к первому и второму управляющим входам запуска блока управления загрузкой отдатчика,а третий управляющий выход - к первому управляющему входу блока управления разгрузкой склада, В связи с тем. что разгрузочная позиция на конвейере только одна, то успешная работа по разгрузке конвейера и загрузке склада идет в том случае, если для любого взятого контейнера находится место на складе. Опыт работы показывает, что в силу ограниченной емкости склада для бесперебойной работы следующей технологической операции - операции скрутки жил в пучок необходимо оперативно следить за состоянием склада с целью ликвидации простоя
оборудования на участке скрутки. В этой связи возникает необходимость изменения порядка загрузки склада. Данное устройство лишено этой возможности. Управление
его разгрузочным роботом осуществляется оператором участка скрутки вручную, с пульта, что снижает функциональные возможности робота.
Цель изобретения - расширение обла0 сти применения устройства.
Для достижения указанной цели в устройство для управления робототехническим комплексом, содержащем датчик наличия контейнера и датчик адреса места контейнера на конвейере, блок управления разгрузкой конвейера, блок исполнитель 1ых механизмов загрузочного робота, блок ячеек памяти характеристик секции, блок управления загрузкой склада, группа
0 информационных входов которого подключена к информационным выходам блока ячеек памяти характеристик секции, блок исполнительных механизмов разгрузочного робота, блок управления разгрузкой склада,
5 группа информационных входов .которого соединена с соответствуюи;ей группой информационных выходов блока ячеек памяти характеристик секции, блок управления загрузкой мест отдатчиков. Первый и второй
0 задающие входы блока, разгрузки конвейера подключены соответственно квыходам задатчика адреса места контейнера на конвейере и датчика наличия контейнера, первый и второй управляющие выходы блока
5 управления загрузкой склада подключены соответственно к первому и второму управ. ляющим входам блока исполнительных механизмов загрузочного робота, а первый, второй и третий информационные входы к
0 соответствующим выходам блока исполнительных механизмов загрузочного робота, группа информационных выходов которого соединена с группой информационных входов блока управления загрузкой склада,
5 вход сброса которого подключен к первому управляющему выходу блока управления разгрузкой конвейера, первый и второй управляющие выходы блока исполнительных механизмов разгрузочного робота подключены соответственно к первому и второму управляющим входам запуска блока управления загрузкой отдатчика, а третий управляющий выход - к первому управляющему входу блок.э управления разгрузкой склада,
5 введены группа блоков адресации мест отдатчиков и группа датчиков наличия контейнеров на конвейере и задатчиков адреса места, первая и вторая группы информационных выходов каждого блока адресации мест отдатчиков соединены соответственно
с первой и второй группами информационных входов блока управления загрузкой мест отдатчиков, сигнальный выход - с входом разрешения чтения загрузки мест отдатчиков, первый и второй выходы управления чтением которого соединены соответстпенно с первым и вторым входами .чтения блока адресации мест отдатчиков, каждый из которых состоит из датчиков состояния мест отдатчика, подключенного к разрешающему выходу, регистра задания кода цвета, разрядные входы которого подключены к первой группе информационных выходов блока, регистра задания кода места, разрядные выходы которого подключены ко второй группе информационных выходов блока, при этом информационные выходы датчиков наличил контейнеров на конвейере и задатчиков адреса места соединены соответственно с первым и вторым информационными входами блока управления разгрузкой конвейера, третий, четвертый, пятый, шестой и седьмой управляющие входы блока исполнительных механизмов загрузочного робота подключены соответственно к третьему и 1 етвертому выходам блока управления загрузкой склада, к парвому и второму выходам блока управления разгрузкой склада и к первому выходу блока управления загрузкой мест отдатчиков, а четвертый, пятый, шестой и седьмой информационные выходы блока исполнительных механизмов загрузочного робота подключены соответстпенно к третьему и четвертому входам блока управления разгрузкой конвейера, пятому и шестому входам блока управления загрузкой склада, седьмой информационный выход блока исполнительных механизмов загрузочного робота подключен к входу сброса блока разгрузкой склада и информационному входу блока управления загрузкой мест отдатчиков, вход запуска блока управления загрузкой склада соединен со вторым управляющим входом блока управления разгрузкой конвейера, управляющий вход блока управления загрузкой склада и восьмой управляюш.ий вход блока исполнительных механизмов загрузочного робота подключены к третьему выходу блока управления разгрузкой склада, пятый и шестой выходы блока управления загрузкой склада подключены к пятому и шестому входам блока управления разгрузкой конвейера, вход запуска и группа информационных входов блока управления разгрузкой склада подключены ксигнальному выходу и к группе информационных оыходов блока управления загрузкой мест отдатчиков, первый и второй установочные выходы блока управления разгрузкой складе подключены соответственно к первому и второму установочным входам блока управления загрузкой мест отдатчиков, а установочный выход блока управления загрузкой 5 - к. входу сброса блока управления разгрузкой конвейера,
На фиг.1 показана блок-схема устройства; на фиг.2 - блок исполнительных механизмов загрузочного робота; на фиг.З - блок 0 управления загрузкой склада; на фиг.4 блок управления разгрузкой конвейера; на фиг.5 - блок исполнительных механизмов разгрузочного робота; на фиг.б - блок управления разгрузкой склада; на фиг.7 - блок5 управления загрузкой мест отдатчиков; на фиг.В,а - регистр с устройством записи и считывания информации; на фиг.8,б - приег5опйредэтч 1к или шинные формирователи.
0Как показано на фиг.1, устройство содержит загрузочный 1 и разгрузочный 2 роботы, блоки 3 и 4 исполнительных глеханизмов указанных роботов, секционный склад-накопитель 5 с блоком б ячеек
5 пзмлти характеристик секции, блоки 7 и 8 управления загрузкой склада соответственно, блок 9 управления разгрузкой конвейера, блок 10 управления загрузкой мест отдатчиков, группу блоков 11 адресации
0 мест отдатчиков, конвейер 12, подающий .контейнеры с изолированной телефонной жилой от автоматических линий по производству зтих жил, блок 13 задатчиков параметра места на конвейере. Роботы
5 перемещаются внизу по своему монорельсу 14. В вертикальном положении они удерживаются с помощью стойки, закрепленной в верхней части.
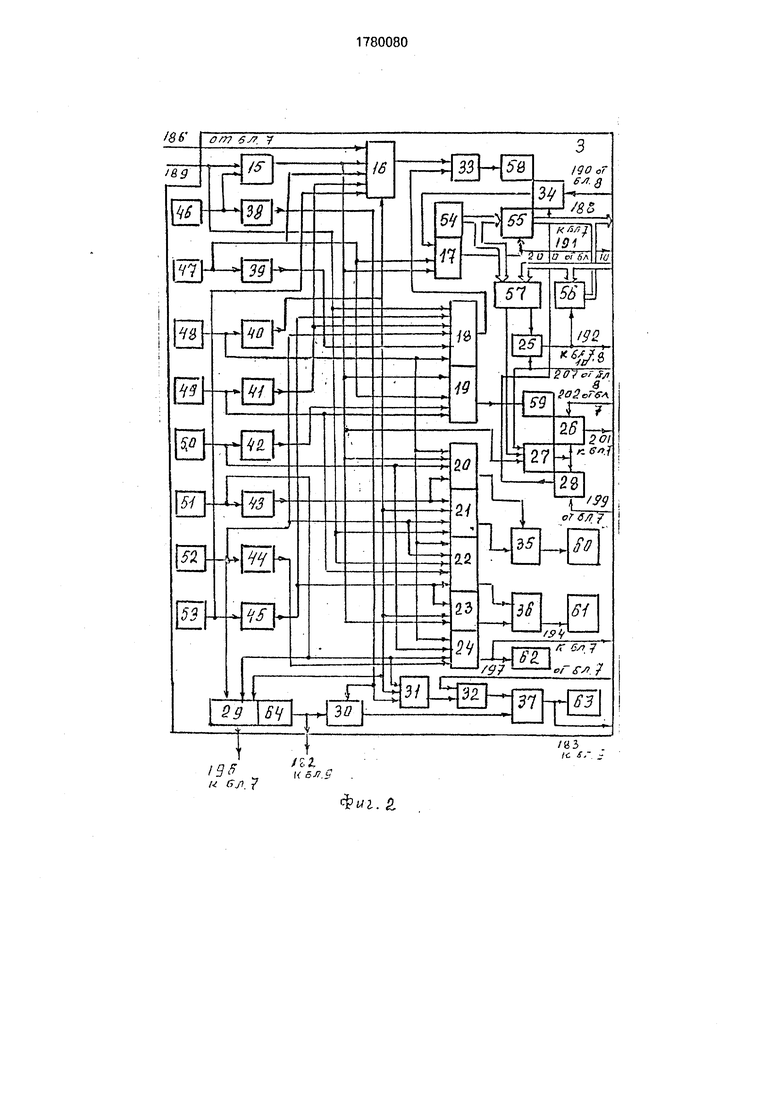
Блок 3 {фиг.2) исполнительных механизмов загрузочного робота содержит элементы И 15-32, элементы ИЛИ 33-37, инверторы 38-45, датчики 46-53, фиксирующие соответственно поворот робота в сторону конвейера, наличие контейнера перед
5 роботом, наличие контейнера в захвате; захват выдвинут, захват поднят, захват возвращен, поворот в сторону склада, захват опущен, датчик 54, кодирующий цвет изоляции стояш,его впереди контейнера,
0 ключи 55 и 56, элемент 57 сравнения, механизмы 58-63 выдвижения, поднятия, возврата, опускания захвата соответственно, а также поворота в сторону склада и конвейера соответственно, элемент запуска (кноп5 ка ПУСК) 64.
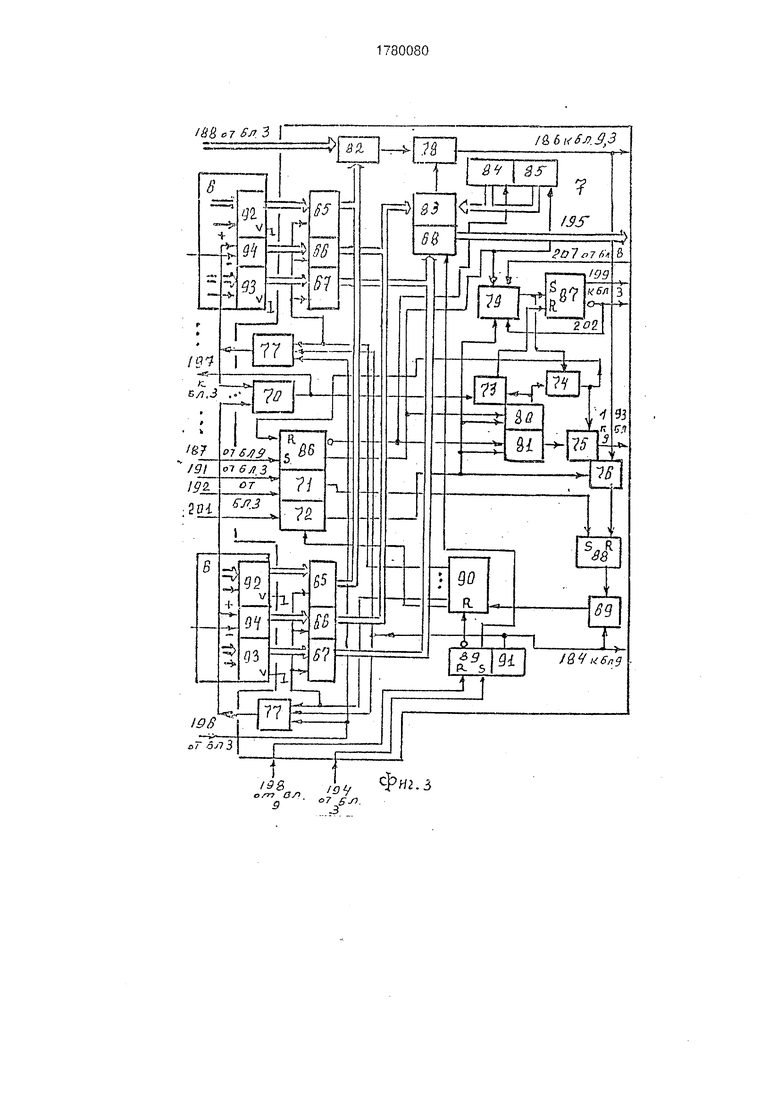
Блок 7 (фиг.З) управления загрузкой склада содержит ключи 65-69, элементы ИЛИ 70-76, элементы И 77-81. элементы 82 и 83 сравнения, задатчики 84 и 85 минимально необходимого и максимально допустимого количества контейнеров в секции, триггеры 86-89, регистр сдвига 90, ген(зратор91.
На фиг.З изображен также блок 6, включающий задатчик (регистр) 92, кодирующий цвет места е секции, т.е. с каким цветом изоляции провода необходимо ставить сюда контейнер, задатчик (регистр) 93, кодирующий местонахождение секции на маршруте движения, реверсивный счетчик 94, учитывающий количество контейнеров в данной секции.
Блок 9 (фиг,) управления разгрузкой, конвейера содержит элемент И 95, ключи 96 и 97, элементы ИЛИ 98-100, регистр сдвига 101, двоичный счетчик 102, дешифратор 103, триггер 104.
На фиг. изображен также блок 13, включающий задатчик (регистр) 105, фиксирующий адрес (код) месторасположения данного места на конвейере, и датчик 106, фиксирующий наличие или отсутствие контейнера на данном месте конвейера.
Блок 4 (фиг.5) исполнительных механизмов разгрузочного робота содержит элементы И 107-116, элементы ИЛИ 117-120, инверторы 121-128, датчики 129-136, фиксирующие соответственно наличие контейнера перед роботом, контейнер в захвате, захват опущен, поворот в сторону склада, захват выдвинут, захват поднят, захзат возвращен, поворот в сторону отдатчика, элемент запуска (кнопка ПУСК) 137, механизмы 138-141 опускания, поднятия, возврата, выдвижения захвата соответственно и 142 и 143 поворота в сторону отдатчиков и склада соответственно.
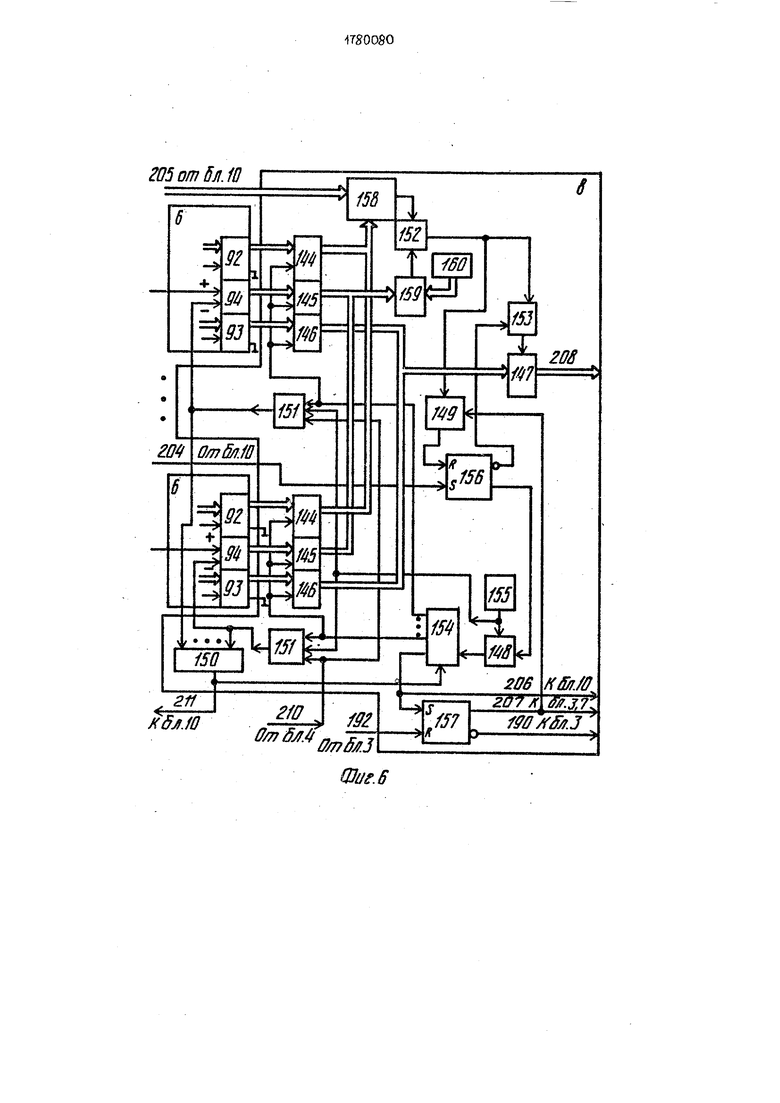
Блок 8 (фиг.6) управления разгрузкой склада содержит ключи 144-148, элементы ИЛИ 149,150, элементы И 151-153, регистр сдвига 154, генератор 155, триггеры 156,157, элементы 158,159 сравнения, задатчик 160 количества контейнеров в секции.
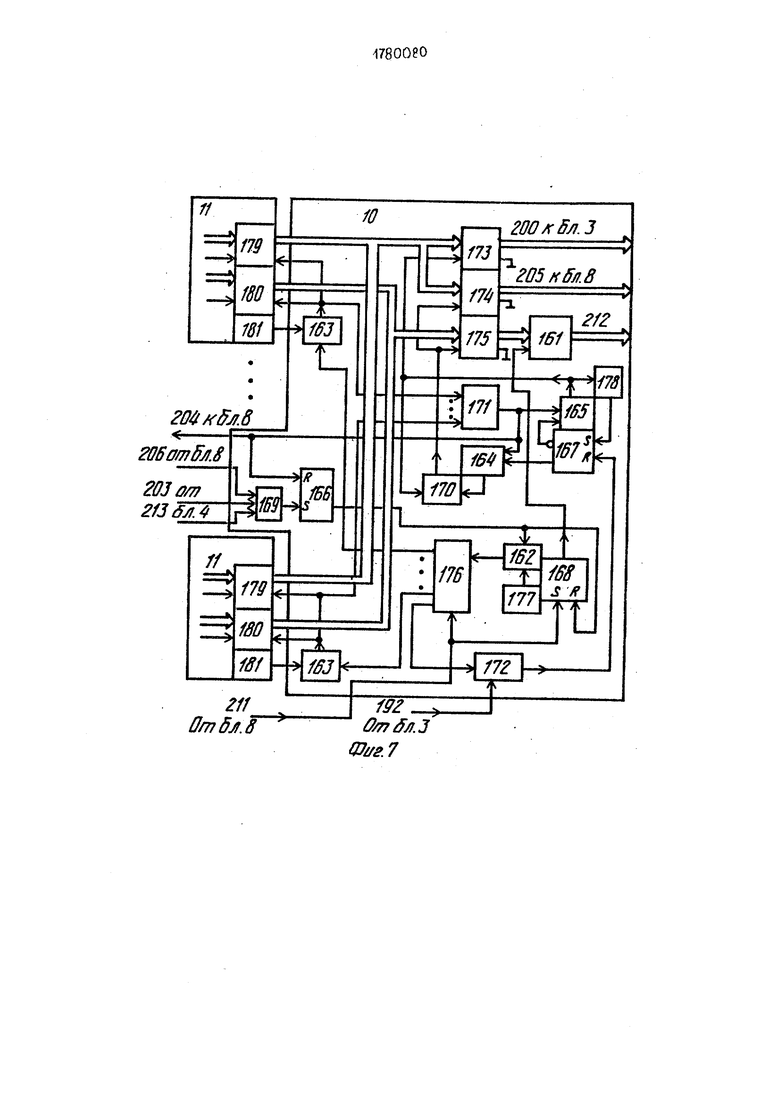
Блок 10 (фиг.7) управления загрузкой мест отдатчиков содержит ключи 161, 162, элементы И 163-165, триггеры 166-168, элементы ИЛИ 169--172, буферные регистры 173-175, регистр сдвига 176, генератор 177, элемент временной задержки 178.
На фиг.7 показана также группа 11, включающая задатчик (регистр) 179, кодирующий цвет места отдатчика, т.е. с каким цветом изоляции провода ставить контейнер на это место, задатчик (регистр) 180, кодирующий расположение этого места на маршруте движения, датчик 181. фиксирующий наличие контейнера на данном месте (стоит или не стоит), Цифрами 182-213 указаны каналы передачи сигналов между блоками.
Устройство, представляющее собой два автономно работающих робота, работает следующим образом. Каждый робот запускается в работу от своих элементов запуска. Роботы связывают между собой участок автоматических линий по производству изолированных телефонных проводоа и участок скрутки проводов в пучок.
0 От автоматических линий по производству телефонных проводов поступают по конвейеру 12 (фиг,1) наполненные проводом контейнеры и останавливаются в конце конвейера. Если контейнеров несколько, то
5 они группируются вплотную (за счет проскальзывания роликов конвейера). Задачей загрузочного робота. 1 является взятие контейнера с конвейера и транспортирование его на.склад 5 в заранее выбранную секцию.
0 Склад разбит на несколько секций. Каждая секция характеризуется своим блоком 6. В задачу разгрузочного робота 2 входит взятие требуемого, согласно цвету, контейнера со склада 5 и установка его на заранее вы5 бранное свободное место отдатчика. Отдатчики питают участок скрутки. Если нет запроса от робота 2, то робот 1 работать в следующих двух режимах:
0 1, Взятие контейнера с конвейера и поиск места на складе. Причем в первую очередь идет поиск в соответствии с цветом изоляции и числом контейнеров в секции меньщим минимально необходимого на одну смену непрерывной работы участка скрутки. .
2. Если мест с минимальным количеством контейнеров данного цвета на складе нет среди всех контейнеров на конвейере,
0 то вторично идет осмотр очереди на конвейере. Если контейнер стоит на конвейере, то вновь ищется его место на складе, но уже с числом контейнеров в секции максималь. но допустимым. Если в обоих случаях место
5 не найдено, то робот периодически осматривает очередь на конвейере пока не найдет место на складе.
При поступлении запроса от робота 2, а это может быть в случае, если он не нашел
0 на складе контейнер с цветом, который нужно установить на свободное место отдатчика, то робот и переходит в третий режим работы, а именно в первую очередь он идет на конвейере контейнер с требуемым цветом для отдатчика и при наличии отправляет его на склад. Если требуемый контейнер не найден среди всех на конвейере, то робот 1 переходит на работу по первым двумя режимам. После установки контейнера на склад.
не удовлетворий aaripoca, робот 1 вновь осматривает всю очередь на конвейере, не появился ли за это время требуемый по запросу контейнер. При положительном результате требуемый контейнер транспортируется на склад, с противном случае робот 1 опять переходит в первые два режима, и т.д.
Ниже работа ка кдого робота в отдельности описана более подробно.
Работа загрузочного робота
С элемента запуска (кнопка) 64 (фиг.2) по каналу 182 запускается в работу блок 9 (фиг.4).
Одновременно, если робот не повормут в сторону конвейера, через элемент И 30 (фиг.2), ИЛИ 37 подается команда на механизм 63 поворота робота в сторону конвейера. Эта команда по каналу 183 дублирует (только при пуске) запуск блока 9 (фиг.), При поступлении одного из сигналов на вход элемента ИЛИ 100 устанавливается триггер 104 и запускается в работу блок 9 управления разгрузкой конвейера (осмотр очереди контейнеров на конвейере, если их там несколько).
Происходит это следующим образом. Как только триггер 104 установится п единичное состояние, сигналом с его выхода откроется ключ 97, и импульсы генератора 91 (фиг.З) по каналу 184 поступают на вход регистра сдвига 101, который имеет (М-Ы) выходов, где М - допустимое число разгрузочных позиций на конвейере, т.е. регистрируемая очередь контейнеров. Регистр сдвига 101 (фиг.А) может быть выполнен, о частности, в виде двоичного счетчика 102 и дешифратора 103. подключенного к параллельным выходам счетчика.
Единичные сигналы последовательно появляются на первом и т.д. до М выходах регистра сдвига 101 (фиг,4).
Данные сигналы поступают на первый вход соответствующего элемента И 95. второй сход указанного элемента И 95 поступает сигнал с соответствующего 106, регистрирующего наличие контейнера на соответствующем месте конвейера. Если контейнер стоит (есть сигнал сдатчика 106), то появляется сигнал с соответствующего элемента И 95, который открывает соответствующий ключ 96 и данные о соответствующего задатчика 105 поступают на выход блока 9 и далее по каналу 185 на вход блока управления двихсением,
Однопременно через элемент ИЛИ 99 (фиг.4) осуществляется сброс триггера 104 и останов регистра-сдвига 101. Сброс регистра 101 осуществляется сигналом по каналу 186 (фиг.З), когда найдено место на
складе, Если Г5ри осмотре всей очереди на кс1нг53йера не окажется ни одного контейнера, то curtianoM с (М+1) выхода регистра 101 мороз эпемент ИЛИ 98 откроется ключ 96 5 гюрвого места конвейера и его код места с задатчика 105 по каналу 185 поступает, как указано выше.
Таким образом осуществляется запуск загрузочного робота 1 и его движение вдоль0 конвейера к выбранному на нем блоком 9 (фиг,4) месту. Если, как указано выше, на конвейере не будет обнаружен ни о,цин контей1-;ер, то сигнал с (M-i-l) выхода регистра 101 одновременно пост пает по каналу 187.
5 на S-вход триггера 85 (фиг.З), фиксируя тем самым просмотр всей очереди на конвейере.
После останова робота 1 (фиг.1)у конвейера и при наличии контейнера на разгрузочной позиции датчиком 54 (фиг.2) определяется цвет изоляции провода в контейнера. Код цвета с выхода датчика 54 через открытый ключ 55 по каналу 188 поступает в блок 7 (фиг.З) управления загрузкой склада на один из входов элемента 82, Ключ 55 (фиг.2) открывается сигналом с выхода элемента И 17. Данный сигнал появляется, если: робот остановлен и повернут в сторону конвейера (сигнал останова по каналу 189 поступает с блока управления движением); контейнер стоит перед ним; сброшен триггер 157 (фиг,6), т.е. есть единичный сигнал с его инверсного выхода, поступающий Г10 каналу 190 на вход элемента
5 ИЛИ 34 (фиг.2). Открывая ключ 55 (фиг.2), сигнал одновременно по каналу 191 поступает на вход элемента ИЛИ 71 блока 7 (фиг.З) и запускает его в работу. Блоком 7 осуществляется поиск места на складе, согласно цвету изоляции провода в контейнере.
Работает блок 7 следующим образом. Как указывалось выше, каждая секция на складе 5 (фиг.1) характеризуется блоком 6,
В кодирующим цвет изолированной жилы в контейнере, количество контейнеров в секции, код места. Указанные параметры хранятся соответственно в регистре 92, реверсивном счетчике 94, задатчик (регистре) 93 (фиг.З). При поступлении сигнала по одному из каналов 191, 192 (фиг.З) на вход элемента ИЛИ 71 (в данном случае по каналу 191) устанавливается в единичное состояние триггер 88 и сигналом с его выхода открывается ключ 69. Через открытый ключ 69 ммпульсы генератора 91 поступают на регистр сдп1:га 90, Регистр сдвига 90 имеет (N+1) выходов, где N-число секций на складе. Единичный сигнал с соответствующего выхода регистра 90 открывает соответствующия ключи 65-67. Через открытый ключ 65 данные с регистра 92 поступаот на второй вход элемента 82 срзвиенпя. На первый вход элемента 02 поступают данные с выхода блока 3 по каналу 18S, каналы 188 определяют либо цвет изоляции провода в KOfiTe Hepe, который стоит перед роботом, либо цвет, который требуется для установки на свободное место отдатчика, о чем будет сказоно ниже, Сигнал на выходе элемента 82 (фиг.З) срззнег лл появится только в случае равенства входных данных. Если входныеданнмеэлемемта 82 не рззны,, то на следуюидем импульса генерзторз 91 .погл со с.г;едующего ед.;ни ного выхода регистра 90 оп-рываются аналогичные ключи 65-67 ооотпетстгзенно следующего блока 6 С1слзда м так до М-го выхода, пока ме со;}падут данные на входе элемента 82, Если до появления (N+1) импульсов на выходе регистра 90 дзниые на входе элемента 02 совпадут и будет сигнал на выходе элемента 03 сравне)ия, то через злемеиты И 70 и ИЛИ 76 осуществляется сброс триггера 88 и, работа блока 7 прекращается, так как ключ 69 закрывается и импульсы генератора 91 не поступают на вход регистра сдвига 90. Сигнал на выходе элемента 83 сравнения будет в том случае, если выходные данные ключа 66 будут строго меньше данных задатчиков 84 или 85. Дан.чые с выхода ключа 66 отражают количество ко1 тейнеров D той секции, ключ 66 который открыт в данный момент. При включении устройства в начальный момент первь й триггер 86 сброшен и сигнал с его инверсного выхода считает данные задатчика 84. Задатчик 84 хранит минимально необходимое число (количество контейнеров), которое обеспечивает бесперебойную работу одной смены следующей технологической операции - операции скрутки телефонных проводов в пучок. Следовательно, в первый ,моглент блоком 7 осуществляется загрузка склз,ца минимально необхо,цимым ко/гмчеством контейнеров. Установка триггера 86, как говорилось выше, осуществляется сигналом по каналу 187 с (М+1) выхо,ца регистра с,цвига 101 (фиг,4), т.е. когда осмотрена вся очередь на конвейере.
Если при осмотре гзсех секций склада с данными задатчика 84 не нашлось местэ на складе, то сигналом с (N+1) выхода регистра 90 через элемент ИЛИ 72, И 81 и ИЛИ 75 с выхо,иа блока 7 по каналу 193 блок 9 внооь запускается в работу с ранее остзновленного места. Будет продолжен поиск контейнера с параметрами задатчика 84. После установки триггера 86 .иг.З) сигнал с его прямого выхода считывает данные задатчикз 85. Задатчик 85 хранит данные макс-имально возможного количества контейнеров, помещенных в секцию склада, т.е. емкость секции. Таким образом, поело установки триггера 86 начинаетсп второй
этап работы блока 7 и происходит поиск на ко шейере контейнеров с цветом изоляции, место для которых еще есть на складе. Если окажется, что мест на склгэде с данными зэдатчика 85 больше нет, то нэ последнем
0 (M-i-1) выходе регистра сдвига 90 с помощью элементов ИЛИ 72, 74, И 80 осуществляется сброс триггера 86 и через элемент ИЛИ 75 по каналу 193 .запуск вновь в работу блока 9 для поиска контейнера с (ужным цветом и с
5 минимальным задатчиком. В дальнейшем указанная последовательность поиска коьтейнера для загрузки склада повторяется,Замети.м, что данный процесс идет в том случае, если нот запроса на его изменение
0 со стороны разгрузочного робота, т.е. триггер 157 (фиг.6) не установлен и существует единичный сигнал по каналу 190. Условие установки триггера 157 (фиг.6) буд.ет рассмотрено ниже. Одновременно сигнал с выхода элемента И 76 (фиг.З) по каналу 186 поступает на вход блока 3 (ф1-1г.2), т.е. на вход элемента И 16, фиксируя, что место нг складе для данного контейнера найдено. Код этого места с задатчика 93 (фиг.З) через
0 открытый, ключ 67 поступает на информационные входы ключа 68. Так как место на складе найдено и робот стоит перед нужным контейнером у конвейера, блоком 3 (фиг.2) осуществляется следующая последовательность действий с захватом; выдвижение, подьем, возврат. После этого дается команда с выхода элемента И 24 на поворот в сторону склада, а сигналом по каналу 194 (фиг.2, 3) устанавливается триггер 89. Сиг0 нал с его прямого выхода открывает ключ 68,
и код выбранного места на складе блока 7
по каналу 195 поступает в блок управления
- движением. Робот начинает перемещаться
выбранному месту на складе.
5 После останова робота осуществляется следующая последовательность действий с захватом; выдвижение, опускание, возврат. Действия выполняются под управлением блока 3 (фиг.2). После возврата захвата осу0 агествллется поворот на 180° а сторону конвейера. После того как робот выгрузит контейнер в секцию склада, соберется; элемент И 29 (фиг.2), выходной сигнал которого по каналу 196 подготовит сборку со5 ответствуюа1его И 77 (фиг.З), именно того, который подключен в данный момент к единичному выходу регистра 90 сдвига.-Номер выхода регистра совпадаете номером той секции, где робот выгружал контейнер. Окончательно элемент И 77 соберется, как только появится очередной импульс с генератора 91, Указанный импульс через элемент И 77 поступает на шину сложения реверсивного счетчика 94 выбранной секции склада и увеличивает его содержимое на единицу, а через элемент ИЛИ 70 по каналу 197 подготовит сборку элемента И 32 (фиг.2), и через элемент ИЛИ 37 поступит сигнал поворота робота в сторону конвейера, а по каналу 183 (фиг.2, 4) блок 9 опять запустится в работу для поиска очередного контейнера на конвейере. Робот начинает движение к выбранному месту, как описано выше. Сигнал с элемента ИЛИ 70 через элемент ИЛИ 73 сбрасывает также триггер 87. Сброс регистра 90 осуществляется единичным сигналом с инверсного выхода триггера 89, который, в освою очередь, сбрасывается сигналом по каналу 198 (фиг. 3,4).
В дальнейшем цикл взятия контейнера с конвейера и перемещение к предварительно найденному месту на складе повторяется, как описано выше.
Как указывалось выше, при поступлении запроса от робота 2 процесс загрузки склада идет по иному. При наличии запроса на инверсном выхо,до триггера 157 (фиг.6) по каналу 190 (фиг.2,6) единичный сигнал отсутствует. Отсутствует он и на выходе элемента ИЛИ 34, так как в начальный момент триггер 87 (фиг.3) сброшен и нулевой сигнал по каналу 199 проходит на выход элемента И 28. Нулевой сигнал на выходе элемента ИЛИ 34 (фиг.2) проходит на выход элемента И 17, вследствие чего ключ 55 не откры.вается. Данные датчика 54 помимо информационных входов ключа 55 поступают параллельно на первый вход элемента 57, на другой вход которого поступают данные по каналу 200 (фиг.2,7), представляющие код цвета пустого места на отдатчике (описано ниже). Если входные данные элемента 57 сравнения (фиг.2) не равны, то будет единичный сигнал на первом (левом по схеме) выходе, в противном случае - на втором. Если данные не равны, т.е. цвет не совпал, то соберется элемент И 26 и его сигнал по каналу 201 с выхода блока 3 поступает на вход элемента ИЛИ 72 (фиг.З). Так как триггер 86 не установлен (он устанавливается, когда просмотрена вся очередь на конвейере), то с выхода блока 7 по каналу 193 поступает сигнал на вход элемента ИЛИ 100 (фиг.4) блока 9 для поиска нов-ого контейнера на конвейере, подъезд к нему и останов. Дальше опять идет сравнение кода Цвета с датчика 54 с данными канала 200, и т.д. Если данные совпали, то соберется элемент И 25 (фиг.2), выходной
сигнал которого одновременно по каналу 192 запускает блок 7 (фиг.З) поиска места на складе (а оно будет обязательно), и открывает ключ 56 (фиг.2), пропуская по каналу 188 5 данные на второй вход элемента 82. Одновременно сигнал по каналу 192 (фиг.2,6) сбрасывает триггер 157, ликвидируя тем самым запрос роботу 1, а через элемент ИЛИ 172 (фиг.7) сбрасывается и триггер 167. 0 Таким образом, требуемый контейнер для отдатчика в первую очередь будет доставлен на склад. Если же на всем конвейере не найдется требуемого контейнера, то установится триггер 87 (фиг.З), так как со-5 берется элемент И 79 и будет единичный сигнал по каналу 199 и будет отсутствовать по каналу 202. Если теперь код цвета провода в контейнере не будет совпадать с требуемым для отдатчика, то будет единичный 0 сигнал с выхода элемента И 28 (фиг.2), который в итоге открывает ключ 55, и данные вновь (как указано выше) по каналу 188 поступают на первый вход элемента 82 (фиг.З) блока 7. Будет продолжен поиск места на 5 складе с задатчиком 84 и, если потребуется, с задатчиком 85, но уже без учета запроса от робота 2.
Работа разгрузочного робота. При наличии сигнала с элемента 137 0 (фиг.5) запуска по каналу 203 с выхода блока 4 дается команда на запуск в работу блока 10 (фиг.7). Одновременно, если робот не повернут в сторону склада (единичный сигнал с инвертора 124), через элемент И 116 и 5 элемент ИЛИ 120 обеспечивается поворот робота в сторону склада. Сигналом по каналу 213 возможно дублирование сигнала 203 о момент пуска робота. Сигналом запуска с выхода блока 4 по каналу 203 через элемент 0 ИЛИ 169 (фиг.7) устанавливается в единичное состояние триггер 166 и этим самым запускается блок 10 управления загрузкой мест отдатчиков. Блоком 10 осуществляется поиск свободного места на отдатчиках. 5
Блок 10 работает следующим образом. Сигнал с выхода триггера 166 одновременно сбрасывает триггер 168 и открывает ключ 162. Через открытый ключ 162 импуль0 сы генератора 177 поступают на регистр 176 сдвига. Каждое место на отдатчике характеризуется, как указано выше, следующими параметрами: цветом устанавливаемого контейнера (регистр 179), датчиком 181 на5 личил контейнера на отдатчике (стоит или не стоит контейнер) и задатчиком 180 (регистром), кодирующим данное месторасположение на трассе движения. При поступлении импульсов на вход регистра 176 единичные сигналы появляются последовательно на
его первом и т,д. К-м выходе, где К - число мест на отдатчике,
Если первое место свободно, то единичный сигнал от первого импульса с первого выхода регистра 176 обеспечит сборку первого элемента И 163. Единичный сигнал с данного элемента И 163 считывает данные с соответствующих регистров 179,180 блока 11. Одновременно сигнал с элемента И 163 {фиг.7) через элемент ИЛИ 171 обеспечивает сброс триггера 166 в нулевое положение, в результате чего закрывается ключ 162, прекращается поступление импульсов генератора 177 на вход регистра 176. Одновременно этот же сигнал по каналу 204 с выхода блока 10 устанавливает триггер 156(фиг,6)и запускает в работу блок 8 управления разгрузкой склада. Так как в исходном состоянии триггер 167 (фиг.7) сброшен, то сигнал с его инверсного выхода и сигнал с выхода элемента ИЛИ 171 обеспечат сборку элемента И 165, выходной сигнал которого осуществляет непосредственную запись в буферный регистр 173 кода (содержимое регистра 179) цвета найденного места на отдатчике, который по каналу 200, как указано выше, поступает на информационные входы ключа 56 и на один из входов элемента 57 сравнения (фиг.2). На другой вход элемента 57 поступают данные с датчика 54. Через элемент ИЛИ 170(фиг.7) код цвета дополнительно записывается в регистр 174, откуда по каналу 205 поступает на один из входов элемента 158 сравнения (фиг.6).
Сигналом с выхода элемента ИЛИ 170 заносится D регистр 175 код (содержимое регистра 180) расположения выбранного места отдатчика, куда должен вернуться робот 2 с контейнером со склада 5. Сигнал с выхода элемента И 165 (фиг.7) дополнительно запускает элемент временной задержки 178, который задним фронтом обеспечивает установку триггера 167 в единичное состояние. Установленный триггер 167 запрещает сборку элемента И 165, а следовательно, никакой последующий код цвета свободного места отдатчика не занесется в регистр 173.
Такая логика выбрана из тех соображений, что если на С1спаде не найдется контейнер с нужным цветом, то будет дан запрос загрузочному роботу для поиска на конвейере в первую очередь контейнера с цветом изоляции, код которого хранится в регистре 173,
На последнем (К+1) выходе регистра 176 (фмг.7) через элемент ИЛИ 172 осуществляется сброс триггера 167 для поиска на отдатчике вновь.
Если все места на отдатчике осмотрены и не найдено свободного места, то сброс триггера 166 не происходит, процесс зацикливается до появления свободного места на
отдатчике.
Если место на отдатчике найдено, но нет контейнера с данным цветом на складе, то установится триггер 157 (фиг.6) и даст запрос роботу 1 на поиск нужного контейнера в первую очередь- (см.выше). Сигнал с (N+1) выхода регистра 154 по каналу 206 через элемент ИЛИ 169 (фиг.7) вновь запустите работу блок 10с ранее остановленного места. Будут осматриваться
5 дальнейшие места отдатчиков. Одновременно сигнал по кандау 207 поступает иа входы элементов И 25, 27 (фиг.2) и вход элемента И 79 (фиг.З). Если место будет вновь найдено, то код цвета занесется только в регистр 174, а код месторасположения - по-прежнему в регистр 175. Процесс поиска блоком 8 (фиг.6) контейнера на складе возобновится к, таким образом, работа блоков 10 и 8 будет чередоваться, пока не будет
5 найден контейнер на складе.
Принцип работы блока 8 (фиг.6) подобен работе блока 7 (фиг.З). Установленный триггер156 (фиг.6) сигналом с его прямого Dухода открывает ключ 148, и импульсы
0 генератора 155 начинают поступать на вход регистра 154 сдвига. Единичные сигналы с выходов регистра 154 последовательно открывают группу ключей 144-146. Код цвета поступает из регистра 92 на вход элемента
5 158 сравнения. На другой вход элемента 158 поступают данные по каналу 205, характеризующие цвет последнего найденного места на отдатчике (фиг.7). Если место на складе с данным цветом найдено, то единичный сигнал с выхода элемента 158 сравнения поступает на первый вход элемента И
152.На второй вход элемента И 152 подается сигнал с выхода элемента 159 сравнения. На первый вход элемента 159 подаются данные с реверсивных счетчиков 94 через открытый ключ 145, а на второй - данные с задатчика 160. В данном случае код задатчика равен нулю.
Если результат сравнения больше нуля,
0 то появляется единичный сигнал на выходе элемента 159.
Сигнал с выхода элемента И 152 через элемент ИЛИ 149 сбросит триггер 156 и остановит регистр 154 сдвига. Код положения
5 выбранного места секции из регистра 93 t-, открытый ключ 146 поступает на информационные входы ключа 147. Если место на складе-найдено, то соберется элемент И
153,сигнал которого открывает ключ 147 и пропускает код выбранного на складе места
по каналу 208 на вход блока управления движением. Робот начинает движение к выбранному месту на складе. После останова у места осуществляется следующая последовательность действий с захватом: выдви- 5 жение, подъем, возврате контейнером. Все действия с захватом управляются блоком 4 (фиг.5). Сигнал останова по каналу 209 поступает с блока управления движением. После возврата захвата сигналом с элемента И Ю И 114 осуществляется поворот робота в сто рону отдатчиков. Одновременно этот же сигнал по каналу 210 поступает на один из входов элемента И 151 (фиг.б). На следующем импульсе генератора 155 соберется 15 тот элемент И 151, который подключен к единичному выходу регистра сдвига 154. Единичный сигнал с элемента И 151 qoCTyпает на вычитающий вход соответствующего реверсивного счетчика 94, уменьшая 20 количество контейнеров в секции на единицу. Одновременно этот же сигнал через элемент ИЛИ 159 сбрасывает регистр сдвига 154,а по каналу 211 сбрасывает регистр сдвига 176 (фиг.7) и устанавливает триггер 25 168. Сигнал с триггера 168 открывает ключ, и код ранее найденного места отдатчика с регистра 175 поступает по каналу 212 на вход блока управления движением. Роботначинает движение к выбранному месту на ЗО отдатчике.
После останова робота у места на отдатчике блоком 4 осуществляется следующая последовательность действий с захватом: выдвижение, опускание, возврат. После это- 35 го по сигналу с элемента И 115 через ИЛИ 120 осуществляется поворот в сторону склада и одновременно по каналу 213 поступает сигнал на вход элемента ИЛИ 169 {фиг.7) блока 10 для его запуска на поиск очередно- 40 го места на отдатчиках, как описано выше. В дальнейшем цикл работы повторяется.
В случае если при осмотре всех секций склада контейнера с нужным цветом изоляции не нашлось, то сигналом на (N+1) /jg выходе (последнем) регистра сдвига 154 установится триггер 157 (см.выше). Сигнал с его прямого выхода через элемент ИЛИ 149 сбросит триггер 156, закроет ключ 148 и остановит регистр сдвига 154 Ha(N+1)(no- 50 следнем) выходе. Одновременно с (N+1) выхода регистр 154 сигналом по каналу 206 фиг.6,7) вновь запускается JQ работу блок 10 на поиск следующего свободного места. Сигнал с прямого выхода триггера 157 ее (фиг.б) по каналу 207, как указано выше, поступает также на вход элемента И 79 фиг.З) и, если триггер 86 установлен, а триггер 87 сброшен, то на последнем импульсе с регистра 90 устанавливается триггер 87 и
сбрасывается триггер 86. В результате соберется элемент И 28 (фиг.2) и, не удовлетеооив запроса среди всех контейнеров на конвейере, начинает вновь поиск места на складе с минимальным задатчиком среди контейнеров на конвейере, как указано выше.
Такой логикой управления достигается бесперебойная работа разгрузочного робота пока существует хоть одно свободное место на отдатчиках и имеется контейнер с нужным цветом на складе.
Регистры 84, 85, 92, 105, 173-175, 179. 180 выполнены на базе схемы, показаннойна фиг.8,а, а ключи 55, 56, 65-68, 96, 144147, 161 на базе схемы на фиг. 8,6.
Формула изобретения
Устройство для управления робототехнологическим комплексом, содержащее датчик наличия контейнера и задатчик адреса места контейнера на конвейере, блок управления разгрузкой конвейера, блок исполнительных механизмов загрузочного робота, блок ячеек памяти характеристик секции, блок управления загрузкой склада, группа информационных входов которого подключена к информационным выходам блока ячеек памяти характеристик секции, блок исполнительных механизмов разгрузочного робота, блок управления разгрузкой склада, группа информационных входов которого соединена с соответствующей группой информационных выходов блока ячеек памяти характеристик секции, блок управления загрузкой отдатчиков, первый и второй задающие входы блока разгрузки конвейера подключены соответственно к выходам задатчика адреса места контейнера на конвейере и датчика наличия контейнер§. первый и второй управляющие выходы блока управления загрузкой склада подключены соответственно к первому и второму управляющим входам блока исполнительных механизмов загрузочного робота, а первый, второй и третий информационные входы - к соответствующим выходам блока исполнительных механизмов загрузочного робота, группа информационных выходов которого соединена с группой информационных входов блока управления загрузкой склада, вход сброса которого подключен к первому управляющему выходу блока управления загрузкой конвейера, первый и второй управляющие выходы блока исполнительных механизмов разгрузочного робота подключены соответственно к первому и второму управляющим входам запуска блока управления загрузкой отдатчика, а третий управляющий выход - к первому
управляющему входу блока управления разгрузкой склада, отличающееся тем, что, с целью расширения области применения, введены группа блоков адресации мест отдатчиков и группа наличия на конвейере и задатчиков адреса места отдатчика, первая и вторая группы информационных выходов каждого блока адресации мест отдатчиков соединены соответственно с первой и второй группами информационных входов блока управления загрузкой мест отдатчиков, сигнальный выход - с входом разрешения чтения блока загрузки мест отдатчиков, первый и второй выходы управления чтением которого соединены соответственно .с первым и вторым входами чтения блока адресации мест отдатчиков, каждый из которых состоит из датчика состояния места отдатчика, подключенного к разрушающему выходу регистра задания кода цвета, разрядные выходы которого подключены к первой группе информационных выходов блока, регистра задания кода места, разрядные выходы которого подключены к второй группе информационных выходов блока, при этом информационные выходы датчиков наличия контейнеров на конвейере и задатчиков адреса места соединены соответственно с первым и вторым информационными входами блока управления разгрузкой конвейера, третий-седьмой управляющие входы блока исполнительных механизмов загрузочного робота подключены соответственно к третьему и четвертому выходам блока управления загрузкой склада, к первому и второму выходам блока управления разгрузкой склада и к первому выходу блока управления загрузкой отдатчиков-мест.
а четвертый-седьмой информационные выходы блока исполнительных механизмов загрузочного робота подключены соответственно к третьему и четвертому входам блока управления разгрузкой ковейера пятому и шестому входам блока управления загрузкой склада,седьмой .информационный выход блока исполнительных механизмов загрузочного робота подключен к входу сброса блока управления разгрузкой склада и к информационному входу блока управления загрузкой мест, отдатчиков, вход запуска блока управления загрузкой склада соединен с вторым управляющим выходом блока управления разгрузкой конвейера, управляющий вход блока управления загрузкой склада и восьмой управляющий вход блока исполнительных механизмов
загрузочного робота подключены к третьему выходу блока управления разгрузкой
склада, пятый и шестой выходы блока управлениЛ разгрузкой склада - к пятому и
шестому входам блока управления разгрузкой конвейера, вход запуска и группа информационных входов блока управления разгрузкой склада - к сигнальному выходу и к группе информационных выходов блока управления загрузкой отдатчиков мест, первый и второй установочные выходы блока управления разгрузкой склада подключены соответственно к первому и второму установочным входам блока управлеПИЯ загрузкой мест отдатчиков, а установочный выход блока управления загрузкой склада подключен к входу сброса блока управления разгрузкой конвейера.
фуг.
-;-...
рт 5/.:;






| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения контейнеров от автоматических линий на стационарный склад | 1983 |
|
SU1276594A1 |
| Устройство для управления подвижным роботом | 1985 |
|
SU1344595A1 |
| Устройство для автоматического адресования грузов подвесных конвейеров | 1981 |
|
SU1020324A1 |
| Устройство для управления весовым порционным дозатором | 1989 |
|
SU1795423A1 |
| Устройство для многокомпонентного дозирования компонентов синтетических моющих средств | 1990 |
|
SU1805454A1 |
| Устройство для многокомпонентного порционного дозирования компонентов синтетических моющих средств | 1991 |
|
SU1784953A1 |
| Устройство для многокомпонентного дозирования | 1990 |
|
SU1789974A1 |
| Устройство для управления конвейерной системой | 1984 |
|
SU1240706A1 |
| Система управления транспортным конвейером | 1988 |
|
SU1553479A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АДАПТИВНЫМ МОБИЛЬНЫМ РОБОТОМ | 1998 |
|
RU2143334C1 |




Область применения устройства'отно- сится к автоматизированным системам для упорядоченного транспортирования и складирования различных объектов. Сущность устройства для управления робототехнологическим комплексом заключается в том, что при наличии контейнеров, задатчика адреса места контейнера на конвейере, блока управления разгрузкой конвейера, блока исполнительных механизмов загрузочного и разгрузочного робота, блока управления разгрузкой склада, блока ячеек памяти характеристик секции блока управления загрузкой отдатчиков, для расширения области его применения введены группа блоков адресации мест отдатчиков и группа датчиков наличия контейнеров на конвейере и задатчиков адреса места отдатчика. Данное устройство имеет несколько режимов, 8 ил.
Фыг.//
20J КЪл,1й
Фиг. 5
(Due. 6
Ошдл.З
.3
.
±Л-
fe,3
| Устройство для управления адаптив-НыМ РОбОТОМ | 1979 |
|
SU830304A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для перемещения контейнеров от автоматических линий на стационарный склад | 1983 |
|
SU1276594A1 |
| кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
