Изобретение относится к области беспилотных летательных аппаратов и может быть использовано при разработке приводов аэродинамических рулей.
Известен блок рулевых приводов аэродинамических рулей беспилотных летательных аппаратов, состоящий из четырех исполнительных механизмов, расположенных в объеме, который ограничен внутренней поверхностью фюзеляжа летательного аппарата и соосно расположенной наружной поверхностью стенки газовода реактивного двигателя. Каждый исполнительный механизм имеет корпус, который установлен в фюзеляже посредством узла соединения, вал аэродинамического руля, который установлен на опорах вращения, электродвигатель, вал которого через редуктор соединен с валом аэродинамического руля, датчик положения указанного руля, который соединен кинематической цепью с упомянутым валом руля (Крымов В.Г., Рабинович Л.В., Стеблов В.Г. Исполнительные устройства систем управления летательных аппаратов. М. , Машиностроение, 1987 г., стр. 164, рис. 4.1.).
Недостатком описанной конструкции является большая строительная высота исполнительных механизмов, вызванная наличием большого числа ступеней в редукторе (5 - 6 ступеней), что не позволяет скомпоновать исполнительные механизмы так, чтобы уменьшить их объемы до размеров, необходимых для размещения блока рулевых приводов в указанном выше объеме.
Известен также блок рулевых приводов, размещаемый в объеме, который ограничен внутренней цилиндрической поверхностью фюзеляжа летательного аппарата и соосно расположенной наружной поверхностью стенки газовода реактивного двигателя, содержащий четыре исполнительных механизма. Каждый исполнительный механизм имеет корпус, который установлен в фюзеляже посредством узла соединения, вал аэродинамического руля, который установлен на опорах вращения, электродвигатель, вал которого через редуктор соединен с упомянутым валом руля, датчик положения упомянутого руля, который соединен кинематической цепью с упомянутым валом руля. Упомянутый редуктор состоит из трех типов последовательно соединенных передач - конической, цилиндрической и волновой. Волновая передача выполнена двухволновой по симметричной схеме (Патент РФ N 2102282 МКИ B 64 C 13/34).
Описанный выше блок рулевых приводов принимается в качестве прототипа.
Компоновка и конструкция блока рулевых приводов, описанные в прототипе, обеспечивают строительную высоту исполнительных механизмов до размеров, соизмеримых с диаметром электродвигателя, что позволяет установить блок рулевых приводов в указанном объеме. Однако в известном блоке рулевых приводов жесткость исполнительного механизма недостаточна из - за наличия в редукторе двухволновой передачи с механическим волнообразователем, который контактирует с гибким колесом не по всему периметру, а в двух симметричных зонах, что приводит к наличию зазоров в системе волнообразователь - гибкое колесо - жесткое колесо.
Для устранения указанных выше недостатков блок рулевых приводов снабжен первым и вторым стаканами, которые предназначены для размещения упомянутых опор вращения вала руля, втулкой и опорным роликом, предназначенным для создания опоры для упомянутой втулки, а упомянутый редуктор состоит из зубчатой передачи, имеющей последовательно соединенные первую и вторую цилиндрические пары, каждая из которых содержит шестерню и колесо, шариковой винтовой передачи, состоящей из винта на опорах вращения и гайки и шариков, предназначенных для осуществления взаимодействия упомянутых винта шариковой винтовой передачи и втулки, и передачи с реечным зацеплением, состоящей из рейки зубчатого колеса, упомянутая кинематическая цепь выполнена в виде пространственного кулачкового механизма, позволяющего копировать поворот упомянутого вала руля. Продольная ось вала упомянутого электродвигателя и продольные оси подвижных звеньев упомянутых цилиндрической зубчатой передачи, шариковой винтовой передачи и кулачкового механизма расположены параллельно. Шестерня упомянутой первой цилиндрической пары зубчатой передачи жестко закреплена на валу упомянутого электродвигателя, колесо упомянутой второй цилиндрической пары зубчатой передачи жестко закреплено на винте упомянутой шариковой винтовой передачи, шарики которой расположены между внутренней поверхностью гайки и поверхностью винта упомянутой шариковой винтовой передачи в прорезях, выполненных по винтовой линии, а гайка установлена внутри упомянутой втулки, на наружной поверхности которой жестко закреплена рейка упомянутой передачи с реечным зацеплением, предназначенная для взаимодействия с колесом, которое закреплено на упомянутом валу руля. Первый упомянутый стакан предназначен для жесткого соединения с упомянутым фюзеляжем, второй упомянутый стакан установлен соосно с первым упомянутым стаканом так, что ось упомянутого опорного ролика расположена снаружи упомянутой втулки. Упомянутый узел соединения состоит из стержня с резьбой, который предназначен для соединения упомянутого второго стакана с фюзеляжем, диска, серьги, вилки и сферического подшипника, которые предназначены для крепления упомянутого корпуса к упомянутому диску так, что упомянутая серьга установлена соосно с винтом упомянутой шариковой передачи и соединена через упомянутый сферический подшипник с вилкой, которая расположена на упомянутом диске. Шип радиально-упорного подшипника упомянутой опоры вращения винта упомянутой шариковой винтовой передачи выполнен как одно целое с винтом, а наружное кольцо упомянутого радиально-упорного подшипника установлено в упомянутом корпусе исполнительного механизма. Упомянутый кулачковый механизм состоит из кулачка и гайки, причем кулачок имеет форму вала с прорезями на наружной поверхности, которые выполнены по винтовой линии, а в гайке расположены подпружиненные шарики, предназначенные для взаимодействия с упомянутыми прорезями вала, который соединен с датчиком положения упомянутого руля через крестовую муфту. Гайка упомянутого кулачкового механизма шарнирно соединена с упомянутой втулкой. Гайка упомянутой шариковой винтовой передачи состоит из двух и более отдельных частей.
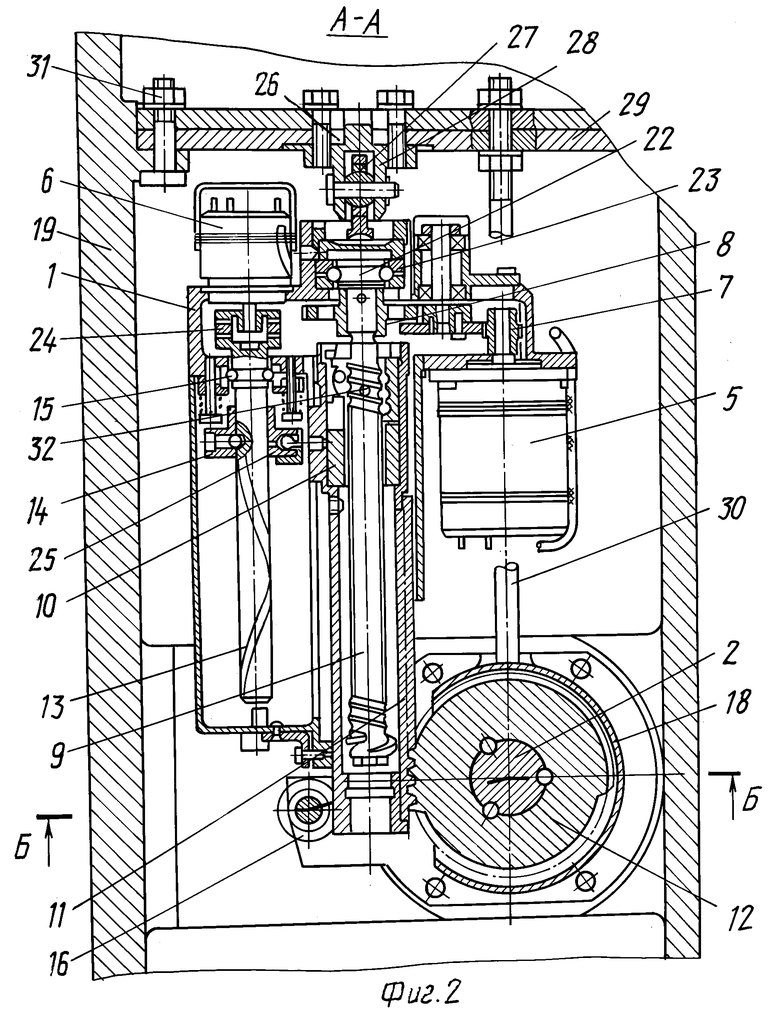
Сущность изобретения поясняется чертежами. На фиг. 1 изображена схема размещения рулевых приводов, поперечное сечение Б - Б на фиг. 2. На фиг. 2 - схема расположения рулевых приводов, продольное сечение А-А на фиг. 1.
Блок рулевых приводов (фиг. 1) состоит из четырех одинаковых исполнительных механизмов, каждый из которых имеет корпус 1. Каждый исполнительный механизм содержит вал 2 аэродинамического руля, установленный на опорах вращения 3 и 4, электродвигатель 5, датчик 6 положения аэродинамического руля и редуктор. Упомянутый редуктор содержит последовательно соединенные две цилиндрические пары 7 и 8, шариковую винтовую передачу, состоящую из винта 9 и гайки 10, выполненной из двух отдельных частей, передачу с реечным зацеплением, в которую входят рейка 11 и зубчатое колесо 12. Для связи датчика 6 с валом 2 использован пространственный кулачковый механизм, состоящий из кулачка 13 и гайки 14. Кулачок 13 имеет форму вала с прорезями на наружной поверхности, которые выполнены по винтовой линии, а гайка 14 содержит подпружиненные шарики 15. Все передачи в редукторе расположены так, что их продольные оси и ось электродвигателя параллельны, а сами передачи соединены следующим образом: на валу электродвигателя 5 жестко установлена шестерня цилиндрической пары 7, а колесо цилиндрической пары 8 жестко закреплено на винте 9 шариковой винтовой передачи. Гайка 10 закреплена внутри втулки 16, выполненной в виде цилиндрического стакана, на наружной образующей поверхности которого жестко закреплена рейка 11. Зубчатое колесо 12 установлено на валу 2. Опоры 3 и 4 вала 2 размещены внутри сборного стакана, состоящего из первого стакана 17 и второго стакана 18. Первый стакан 17 жестко соединен с фюзеляжем 19, второй стакан 18 содержит ось 20 опорного ролика 21. Опорный ролик 21 и зубчатое колесо 12 образуют опору втулки 16, при этом их оси расположены эксцентрично. Кроме того, шип 22 упорно-радиального подшипника опоры вращения винта 9 выполнен за одно целое с винтом 9, а наружное кольцо 23 упомянутого подшипника установлено в корпусе 1. Датчик 6 соединен с кулачком 13 через крестовую муфту 24, а гайка 14 с помощью шарнира 25 соединена со втулкой 16. Корпус 1 содержит серьгу 26, установленную соосно с винтом 9. Серьга 26 со сферическим подшипником 27 служит опорой корпуса 1 относительно вилки 28, расположенной на диске 29, закрепленном в фюзеляже 19. Кроме того, каждый корпус 1 снабжен стержнем 30 с резьбой, один конец которого прикреплен гайкой 31 к диску 29, а другой связан резьбовым соединением со стаканом 18 опоры вала 2. Между поверхностью винта 9 и внутренней поверхностью гайки 10 в прорезях, выполненных по винтовой линии, расположены шарики 32.
Блок рулевых приводов работает следующим образом.
При подаче управляющего сигнала на электродвигатель 5 любого из четырех исполнительных механизмов он начинает вращаться и передает крутящий момент через две последовательно соединенные цилиндрические пары 7 и 8 на винт 9. Гайка 10 вместе со втулкой 16 и рейкой 11 совершает поступательное движение и создает крутящий момент на зубчатом колесе 12 и жестко соединенном с ним валу 2. Поступательное движение втулки 16 через шарнир 25 передается на гайку 14. Поступательное движение гайки 14 преобразуется во вращательное движение кулачка 13, который через крестовую муфту 24 поворачивает движок датчика 6. Шаг кулачка 13 подобран так, что угловое перемещение движка датчика 6 соответствует угловому перемещению вала 2.
Использование в редукторе исполнительного механизма блока рулевых приводов шариковой винтовой передачи и передачи с реечным зацеплением, размещенных и выполненных указанным в изобретении способом, позволяет повысить нагрузочную способность и крутильную жесткость самого исполнительного механизма, а введение в конструкцию блока рулевых приводов стержней 30 с резьбой, у которых один конец жестко прикреплен к диску 29, закрепленному в фюзеляже 19, а другой - связан резьбовым соединением со вторым стаканом 18 опоры вала 2 аэродинамического руля, и соединение опоры каждого исполнительного механизма через сферический подшипник 27 с вилкой 28 упомянутого диска 29 повышают жесткость крепления корпуса 1 исполнительного механизма к фюзеляжу 19. Кроме того, параллельное размещение продольных осей цилиндрической и шариковой винтовой передач редуктора, пространственного кулачкового механизма и электродвигателя 5 позволяет сохранить соизмеримость строительной высоты исполнительных механизмов с диаметром выбранного электродвигателя 5, то есть обеспечивает возможность размещения блока рулевых приводов в объеме, который ограничен внутренней цилиндрической поверхностью фюзеляжа 19 летательного аппарата и соосно расположенной наружной поверхностью стенки газовода реактивного двигателя упомянутого летательного аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ИСПЫТАНИЙ ПЕРЕДАТОЧНОГО МЕХАНИЗМА ПРИВОДА АЭРОДИНАМИЧЕСКОГО РУЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2158909C1 |
| РУЛЕВОЙ ПРИВОД | 2009 |
|
RU2387577C1 |
| РУЛЕВОЙ ПРИВОД | 2010 |
|
RU2444463C1 |
| КОЛЕСНАЯ БРОНЕМАШИНА | 2005 |
|
RU2314478C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ДЛЯ УПРАВЛЕНИЯ ЭЛЕРОНАМИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2556736C1 |
| САМОЛЕТ | 2004 |
|
RU2261196C1 |
| БЛОК РУЛЕВЫХ ПРИВОДОВ | 2008 |
|
RU2370412C1 |
| ЭЛЕКТРОПРИВОД УПРАВЛЕНИЯ РУЛЕВЫМИ ПОВЕРХНОСТЯМИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2466060C2 |
| Электромеханический привод руля | 2024 |
|
RU2824682C1 |
| БЛОК РУЛЕВЫХ ПРИВОДОВ | 1996 |
|
RU2102282C1 |
Изобретение относится к области беспилотных летательных аппаратов и может быть использовано при разработке приводов аэродинамических рулей. Блок состоит из четырех исполнительных механизмов, укрепленных на внутренней поверхности фюзеляжа 19. Каждый механизм имеет корпус 1, вал 2 аэродинамического руля, электродвигатель 5, датчик 6 положения руля и редуктор из трех последовательно соединенных цилиндрической зубчатой передачи, шариковой винтовой передачи и передачи с реечным зацеплением. Датчик 6 связан с валом 2 с помощью пространственного кулачкового механизма. Изобретение направлено на повышение нагрузочной способности, крутильной жесткости и жесткости крепления исполнительных механизмов к фюзеляжу летательного аппарата. 4 з.п. ф-лы, 2 ил.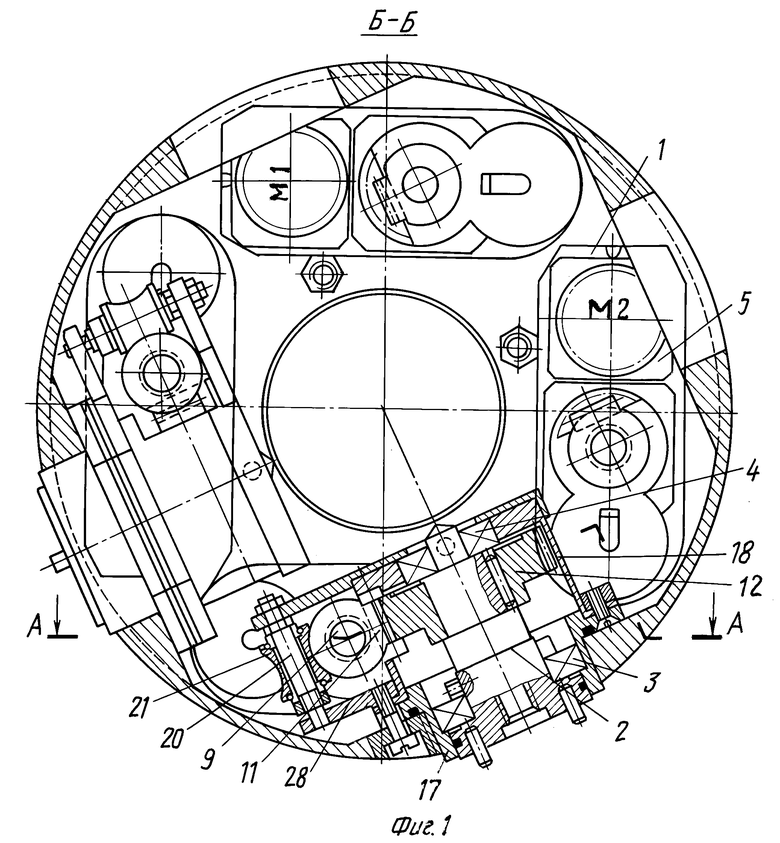
| БЛОК РУЛЕВЫХ ПРИВОДОВ | 1996 |
|
RU2102282C1 |
| DE 4009549 A1, 26.09.1991 | |||
| Устройство для транспортирования штучных грузов | 1979 |
|
SU878688A1 |
| АНАЭРОБНАЯ ЭНЕРГОХОЛОДИЛЬНАЯ УСТАНОВКА С ДВИГАТЕЛЕМ СТИРЛИНГА | 1999 |
|
RU2164612C1 |
