Изобретение относится к области приводов аэродинамических поверхностей беспилотных летательных аппаратов и может быть использовано при создании новых и модернизации существующих летательных аппаратов.
Известны блоки рулевых приводов, состоящие из четырех исполнительных механизмов, расположенных в объеме, ограниченном двумя соосными цилиндрическими поверхностями: корпусом блока, являющимся наружной оболочкой летательной аппарата и газовода двигателя; каждый исполнительный механизм содержит корпус, неполноповоротный вал рулевой поверхности, датчик положения рулевой поверхности, многоступенчатый редуктор и электродвигатель. Понижающий редуктор состоит из зубчатых цилиндрических пар либо зубчатых цилиндрических и конических пар [1, 2] Прототипом заявки является аналог по источнику [2]
Недостатком существующих блоков рулевых приводов является большая строительная высота их исполнительных механизмов, вызванная наличием большого числа ступней в редукторе. Так как в малом объеме зубчатая цилиндрическая пара дает в зависимости от компоновки передаточное отношение от 2 до 5, а передаточное отношение всего редуктора привода от 120 до 200, то число ступеней в редукторе будет 5 6, а это 10 12 типоразмеров зубчатых колес и 5 6 типоразмеров подшипниковых опор. Размещение этих элементов вокруг выходного вала привода и дает большую строительную высоту исполнительного механизма, не позволяющую скомпоновать их так, чтобы они разместились между двумя соосными цилиндрическими поверхностями, имеющих небольшую разницу диаметров, что особенно важно при увеличении диаметра газовода двигателя, необходимого для увеличения мощностных характеристик двигателя. Уменьшение разницы диаметров приводит к сокращению осевых размеров между опорами валов рулевых поверхностей, что, в свою очередь, обуславливает уменьшение нагрузочной способности и изгибной жесткости, что усугубляется несимметричностью передачи нагрузки используемыми выходными каскадами исполнительных механизмов.
В основу изобретения заложена задача по созданию блока рулевых приводов, у которого строительная высота его исполнительных механизмов была бы минимальной и соизмеримой с диаметром выбранного приводного электродвигателя, что обеспечивало бы требуемые механические характеристики, жесткость и нагрузочную способность конструкции в условиях применения увеличенного по диаметру газовода двигателя, проходящего через блок.
Для решения этой задачи в блоке рулевых приводов, состоящем из четырех исполнительных механизмов, размещенных в объеме, ограниченном двумя соосными цилиндрическими поверхностями, наружный из которых является общим корпусом блока, при этом каждый исполнительный механизм содержит собственный корпус, неполноповоротный вал рулевой поверхности, высокоскоростной электродвигатель, многоступенчатый редуктор из последовательно расположенных зубчатых передач и датчик обратной связи положения вала рулевой поверхности, включающий разрезную шестерню, многоступенчатый редуктор выполнен из трех типов последовательно расположенных зубчатых передач: входной конической, цилиндрической и выходной волновой; последняя передача выполнена двухволновой по симметричной схеме и содержит узкое гибкое колесо-кольцо с наружным зубчатым венцом, размещенное внутри жесткого колеса, внутри которого размещен волнообразователь в виде зубчатого колеса с трубчатым валом, на котором с помощью эксцентриков расположены три диска, причем крайние из них симметричны среднему, и, кроме того, по обе стороны жесткого колеса симметрично расположены жестко соединенные с корпусом исполнительного механизма две волновые муфты с внутренним расположением зубьев, взаимодействующих с наружным зубчатым венцом гибкого колеса-кольца; входная коническая передача состоит из двух колес с одинаковым числом зубьев, одно из которых насажено на вал электродвигателя, а другое на вал цилиндрической шестерни, взаимодействующей с зубчатым колесом волнообразователя и образующий с ним цилиндрическую передачу; при этом элементы волновой передачи расположены концентрично с валом рулевой поверхности, а на наружной диаметр жесткого колеса насажен стакан, который охватывает одну из муфт и имеет зубчатый сектор, взаимодействующий с разрезной шестерней датчика обратной связи положения вала рулевой поверхности, дно стакана жестко соединено с валом рулевой поверхности и содержит дугообразные прорези для размещения в них отсек крепления волновой муфты с корпусом, кроме того, корпус исполнительного механизма имеет два цилиндрических выступа, расположенных по обе стороны вала рулевой поверхности, один из которых размещен в ответном пазу общего корпуса блока, а другой обжат двумя пластинами, образующими дополнительную опору четырех корпусов исполнительных механизмов.
Использование в редукторе волновой передачи, которая обладает высоким передаточным отношением (до 300 для одной ступени), что позволяет использовать минимальное число цилиндрических зубчатых пар, и большой нагрузочной способностью (в зацеплении участвуют большое число зубьев) при сравнительно малых габаритах, а также такое выполнение конструкции, при которой совмещение оси выходного вала рулевой поверхности с осью волновой передачи и расположение электродвигателя вдоль оси блока рулевых приводов, позволили уменьшить строительную высоту исполнительных механизмов до размера, соизмеримого с диаметром электродвигателя, и обеспечить требуемую жесткость и нагрузочную способность рулевой поверхности в условиях увеличения диаметра газовода двигателя. Существо изобретения поясняется чертежом, где на фиг. 1 изображен общий вид блока рулевых приводов, поперечный разрез; на фиг. 2 продольный разрез А-А на фиг. 1.
Блок рулевых приводов состоит из общего корпуса 1, в котором крепятся четыре одинаковых исполнительных механизма (М1-М4), каждый из которых имеет свой корпус 2, неполноповоротный вал 3 рулевой поверхности, установленный в подшипниках качения 4, 5 в корпусе 2, высокоскоростной электрический двигатель 6; датчик положения 7 рулевой поверхности и многоступенчатый редуктор. Многоступенчатый редуктор состоит из трех видов зубчатых передач, соединенных последовательно: конической, цилиндрической и волновой. При этом волновая передача является выходной, а коническая пара входной.
Волновая передача двухволновая, выполнена по симметричной схеме и содержит: узкое гибкое колесо-кольцо 8 с наружным зубчатым венцом; симметричный дисковый волнообразователь, размещенный внутри гибкого колеса-кольца 8 и выполненный в виде трубчатого вала 9 с тремя дисками 10, расположенными на эксцентриках 11, причем крайние диски симметричны среднему; жесткое колесо 12 и две волновые муфты 13 и 14, выполненные в виде кольца с внутренним расположением зубьев. Муфты жестко соединены с корпусом исполнительного механизма 2 и симметрично расположены по обе стороны жесткого колеса 12.
Волновая передача расположена концентрично с валом 3 рулевой поверхности, при этом на жесткое колесо 12 (выходное звено волновой передачи) насажен стакан 15, который охватывает одну из волновых муфт 14 и имеет зубчатый сектор 16, образующий цилиндрическую пару и взаимодействующий с разрезной шестерней 17 датчика 7 положения рулевой поверхности. Дно стакана 15 жестко соединено с валом 3 рулевой поверхности и содержит дугообразные прорези 18, в которых размещены стойки 19 крепления волновой муфты 14, расположенной внутри стакана 15, с корпусом 2 исполнительного механизма.
Колеса конической пары 20 и 21 выполнены с одинаковым числом зубьев. Одно из колес 20 насажно на вал электродвигателя 6, а другое 21 на вал цилиндрической шестерни 22, расположенной в кронштейне 23 электродвигателя 6 и взаимодействующей с зубчатым колесом 24 волнообразователя, закрепленным на валу 9.
Корпуса 2 исполнительных механизмов выполнены из двух частей, имеют цилиндрическую форму с двумя вырезами для размещения датчика 7 положения рулевой поверхности и срезом для крепления кронштейна 23 с электродвигателем 6. По обе стороны от вала 3 рулевой поверхности вдоль ее оси каждый корпус 2 снабжен цилиндрическими выступами 25 и 26. Верхний выступ 25 обеспечивает центровку и крепление механизма к общему корпусу 1 рулевого блока, а нижний выступ 26 обжимается двумя пластинами 27. Эти пластины 27 стягиваются болтами 28. Пластины 27 образуют внутреннюю дополнительную опору для четырех исполнительных механизмов.
Блок рулевых приводов работает следующим образом.
При подаче управляющего сигнала на электрический двигатель любого из исполнительных механизмов М1-М4 двигатель начинает вращаться и передает крутящий момент через коническую пару 20 21 с передаточным числом, равным единице, через цилиндрическую пару 22 24, а затем и через зубчатую волновую передачу, в которой момент передается от зубчатого вала 9 волнообразователя тремя дисками 10 на гибкое колесо 8 и от гибкого колеса 8 многопарным зацеплением, двумя диаметрально расположенными зонами зубьев на жесткое колесо 12 и жестко соединенный с ним через стакан 15 вал 3 рулевой поверхности. Вал 3 рулевой поверхности поворачивается и через цилиндрическую пару 16 17 передает вращение на датчик 7 положения рулевой поверхности, который выдает сигнал, пропорциональный углу поворота.
Таким образом, компоновка блока рулевых приводов с исполнительными механизмами, в которых многоступенчатый редуктор состоит из последовательно соединенных зубчатых пар: входной конической, цилиндрической и выходной - волновой, выполненных и размещенных указанным способом, позволила обеспечить строительную высоту, соизмеримую с диаметром электрического двигателя, и тем самым увеличить диаметр газовода двигателя. Наличие двухвалковой передачи, имеющей достаточно высокое передаточное отношение, являющейся выходным звеном многоступенчатого редуктора, выполненной по симметричной схеме, в которой волнообразоватль выполнен из трех дисков, а волновая муфта выполнена из двух колец, жестко соединенных с корпусом и расположенных по обе стороны от жесткого колеса, обеспечивающей симметричную передачу момента от волнообразователя к жесткому колесу, а также использование двух пластин, обжимающих корпуса исполнительных механизмов, и позволили увеличить нагрузочную способность и жесткость рулевой поверхности.
Литература
1. Григорьев В. Г. и Григорьев Д.В. Рулевой привод управляемой аэродинамической поверхности летательного аппарата. Авторское свидетельство N 1794804, кл. B 64 C, 13/38,опублик. 15.02.93. бюл. N 6.
2. Крымов В. Г. Рабинович Л.В. Стеблов В.Г. Исполнительные устройства замены управления летательных аппаратов. М. Машиностроение, 1987 г. рис. 4.1, с.164.2
| название | год | авторы | номер документа |
|---|---|---|---|
| БЛОК РУЛЕВЫХ ПРИВОДОВ | 2008 |
|
RU2370412C1 |
| БЛОК РУЛЕВЫХ ПРИВОДОВ | 1999 |
|
RU2154593C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 2019 |
|
RU2714343C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ РУЛЕВОГО ПРИВОДА | 2004 |
|
RU2265553C1 |
| Электромеханический рулевой привод вращательного действия | 2018 |
|
RU2678385C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ПРИВОДА ИНВАЛИДНОГО КРЕСЛА-КОЛЯСКИ | 1995 |
|
RU2116774C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ СИЛОВОЙ МИНИ-ПРИВОД УПРАВЛЕНИЯ ПОДВИЖНОЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТЬЮ ЛЕТАТЕЛЬНОГО АППАРАТА С ФУНКЦИЕЙ СКЛАДЫВАНИЯ И РАСКРЫТИЯ СЕКЦИИ КРЫЛА | 2014 |
|
RU2565861C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ЗАКРЫЛКА САМОЛЕТА | 2012 |
|
RU2515014C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ПРЕДКРЫЛКА САМОЛЕТА | 2012 |
|
RU2522635C2 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ НА ОСНОВЕ ВОЛНОВОЙ ПЕРЕДАЧИ ПОСТУПАТЕЛЬНОГО ДЕЙСТВИЯ | 2004 |
|
RU2265147C1 |
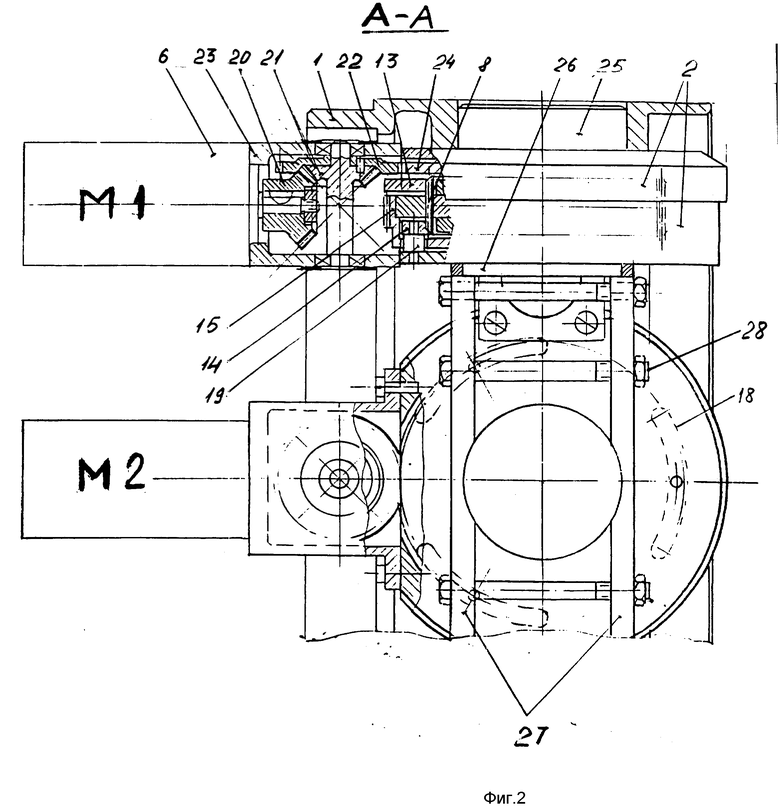
Изобретение относится к области рулевых приводов аэродинамических поверхностей беспилотных летательных аппаратов. Изобретение позволяет уменьшить строительную высоту исполнительных механизмов блоков рулевых приводов до величины, соизмеримой с диаметром электродвигателя, что дает возможность увеличить проходное сечение для газовода двигательной установки проходящего внутри блока. Блок рулевых приводов состоит из общего корпуса 1, внутри которого устанавливается четыре исполнительных механизма, каждый из которых содержит собственный корпус 2, неполноповоротный вал 3 рулевой поверхности, высокоскоростной электродвигатель 6, многоступенчатый редуктор и датчик обратной связи 7. При этом многоступенчатый редуктор выполнен из трех типов последовательно расположенных зубчатых передач: входной-конической, цилиндрической и выходной-двухволновой, выполненной по симметричной схеме. Корпуса исполнительных механизмов имеют специальные выступы 25 и 26. Выступы 25 служат для центровки и крепления с общим корпусом 1 блока, а выступы 26 обжимаются пластинами 27, образующими дополнительную опору. 2 ил.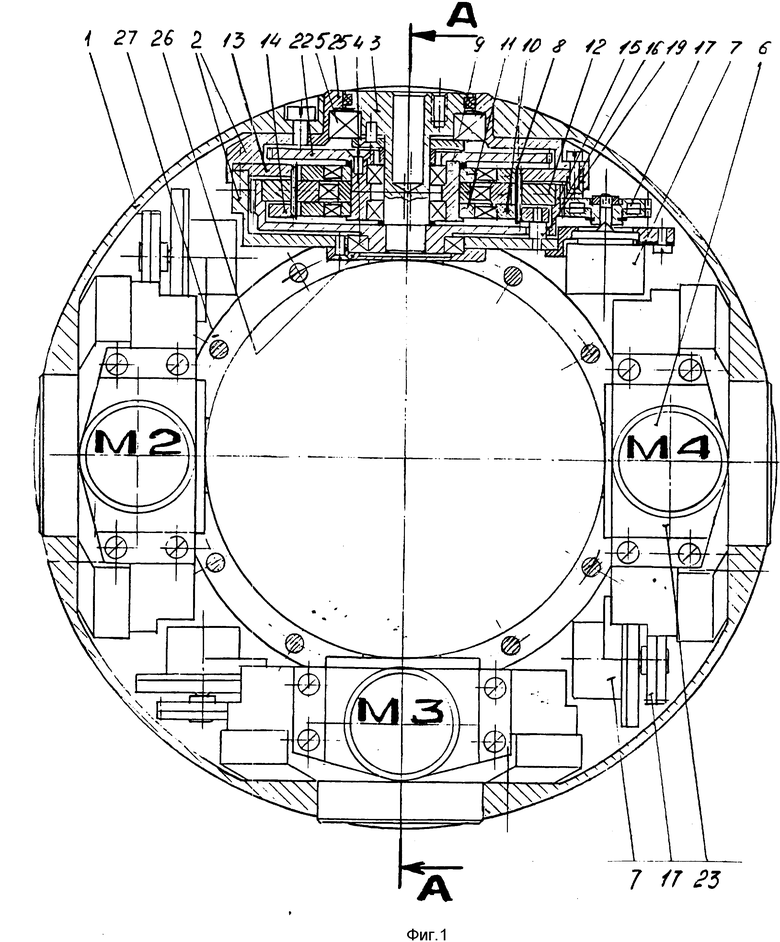
Блок рулевых приводов, состоящий из четырех исполнительных механизмов, размещенных в объеме, ограниченном двумя соосными цилиндрическими поверхностями, наружная из которых является общим корпусом блока, при этом каждый исполнительный механизм содержит собственный корпус, неполноповоротный вал рулевой поверхности, высокоскоростной электродвигатель, многоступенчатый редуктор из последовательно расположенных зубчатых передач и датчик обратной связи положения вала рулевой поверхности, включающий разрезную шестерню, отличающийся тем, что многоступенчатый редуктор выполнен из трех типов последовательно расположенных зубчатых передач входной конической, цилиндрической и выходной волновой, последняя передача выполнена двухволновой по симметричной схеме и содержит узкое гибкое колесо-кольцо с наружным зубчатым венцом, размещенное внутри жесткого колеса и внутри которого размещен волнообразователь в виде зубчатого колеса с трубчатым валом, на котором с помощью эксцентриков расположены три диска, причем крайние из них симметричны среднему, кроме того, по обе стороны жесткого колеса симметрично расположены жестко соединенные с корпусом исполнительного механизма две волновые муфты с внутренним расположением зубьев, взаимодействующих с наружным зубчатым венцом гибкого колеса-кольца, входная коническая передача состоит из двух колес с одинаковым числом зубьев, одно из которых насажено на вал электродвигателя, а другое на вал цилиндрической шестерни, взаимодействующей с зубчатым колесом волнообразователя и образующей с ним цилиндрическую передачу, при этом элементы волновой передачи расположены концентрично с валом рулевой поверхности, а снаружи на жесткое колесо насажен стакан, который охватывает одну из муфт и имеет зубчатый сектор, взаимодействующий с разрезной шестерней датчика обратной связи положения вала рулевой поверхности, дно стакана жестко соединено с валом рулевой поверхности и содержит дугообразные прорези для размещения в них стоек крепления волновой муфты с корпусом, кроме того, корпус исполнительного механизма имеет два цилиндрических выступа, расположенных по обе стороны вала рулевой поверхности, один из которых размещен в ответном пазу общего корпуса блока, а другой обжат двумя пластинами, образующими дополнительную опору четырех корпусов исполнительных механизмов.
| Крымов Б.Г., Рабинович Л.В., Стеблов В.Г | |||
| Исполнительные устройства систем управления летательных аппаратов | |||
| - М.: Машиностроение, 1987, с | |||
| Способ получения суррогата олифы | 1922 |
|
SU164A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
