Изобретение относится к области приводов управления аэродинамическими поверхностями беспилотных летательных аппаратов и может быть использовано как при создании новых, так и при модернизации существующих летательных аппаратов. Оно также может быть использовано в других областях техники, где существует потребность в скоростных приводах.
Известны приводы рулевых поверхностей с использованием в их редукторах шарико-винтовой передачи, см. например, конструктивную схему винтового шарикового преобразователя вращательного движения в поступательное в книге «Привод рулевых поверхностей самолетов», под ред. Ф.И.Склянского. М.: Машиностроение, 1974 г., стр.79, рис.2.4.
Известен блок рулевых приводов (см. патент RU №2154593), содержащий многоступенчатый редуктор с использованием шарико-винтовой и реечной передач.
Известно также рулевое управление для автомобиля, содержащее ходовой винт с ходовой гайкой (см. «Шарико-винтовые механизмы», И.Б.Пясик, Машгиз, Москва-Киев, 1962 г., стр.56, 57, рис.4). Данное техническое решение по своей технической сущности наиболее близко к предлагаемому решению и выбрано в качестве ближайшего аналога предлагаемого изобретения.
Известный привод содержит приводной механизм (рулевое колесо), шарико-винтовой редуктор, включающий ходовой винт с перемещающейся по нему ходовой гайкой, и механическую передачу с гайки на ось исполнительного звена. Приводной механизм закреплен на ходовом винте, по которому перемещается ходовая гайка. Механическая передача от гайки на ось исполнительного звена представляет собой реечную передачу, выполненную в виде связанной с гайкой зубчатой рейки, находящейся в зацеплении с зубчатым сектором, закрепленным на выходной оси исполнительного звена. Ходовой винт с перемещающейся по нему ходовой гайкой, механическая передача и ось исполнительного звена заключены в единый корпус. К корпусу привода прикреплена шпонка, предохраняющая ходовую гайку от поворота в процессе движения по ходовому винту. Поступательное движение ходового винта исключается радиально-упорными подшипниками.
В результате поворота рулевого колеса приводится во вращательное движение ходовой винт, удерживаемый от поступательного движения радиально-упорными подшипниками. Винт, вворачиваясь в гайку, удерживаемую от поворота шпонкой, сообщает ей поступательное движение по винту вместе со связанной с ней зубчатой рейкой. Перемещение ее вызывает обкатку ее зубьев по зубчатому сектору и поворот его вместе с выходной осью исполнительного звена.
Недостатки данного рулевого привода с шарико-винтовой и реечной передачами применительно к управлению рулевыми поверхностями скоростных беспилотных летательных аппаратов связаны с наличием больших изгибных напряжений ходового винта. Действительно, для таких объектов необходимо обеспечить максимально возможное быстродействие привода, а это влечет за собой, в частности, использование ходовых винтов минимального сечения. При этом вследствие применения больших значений угловых скоростей и ускорений поперечная нагрузка на ходовой винт, возникающая при взаимодействии зубчатого колеса с зубчатой рейкой ходовой гайки, также значительна. В результате ходовой винт малого диаметра может деформироваться, изменяя при этом геометрию винта (что приводит к снижению кпд шарико-винтовой передачи), и даже разрушиться.
Технической задачей изобретения является создание быстродействующего рулевого привода, содержащего шарико-винтовую и реечную передачи.
Техническим результатом является повышение надежности и быстродействия рулевого привода.
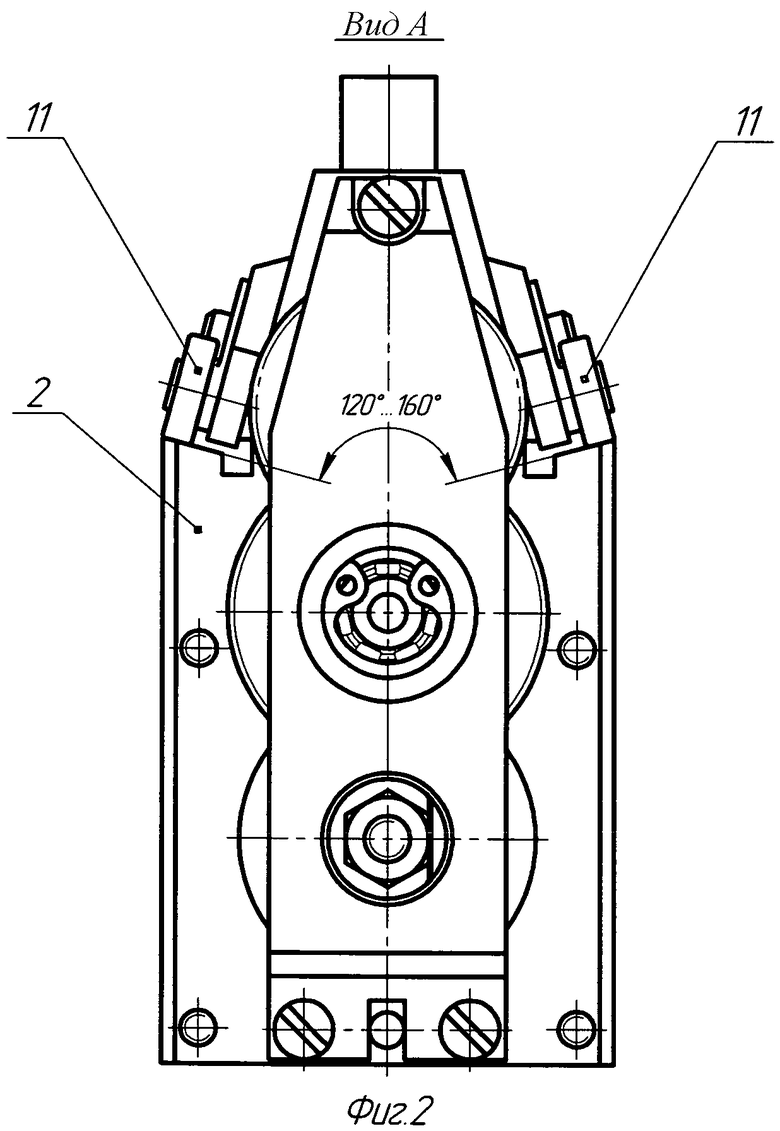
Для решения этой задачи рулевой привод, содержащий двигатель, редуктор, включающий размещенную в его корпусе шарико-винтовую передачу в виде ходового винта с ходовой гайкой, реечную зубчатую передачу в виде зубчатой рейки каретки, связанной с ходовой гайкой, и зубчатого сектора вала руля, снабжен блокатором изгибных деформаций ходового винта, выполненным в виде двух пар подшипников качения, закрепленных на каретке ходовой гайки и опирающихся на корпус редуктора, причем корпус редуктора в районе качения двух пар подшипников выполнен в виде двух продольных плоских направляющих, образующих между собой угол 120°…160°.
При этом подшипники качения установлены на каретке ходовой гайки с возможностью регулирования их поджатия к продольным плоским направляющим корпуса редуктора, например, с помощью эксцентриков.
Применение блокатора, выполненного указанным выше образом в виде двух пар подшипников, закрепленных на каретке с возможностью регулирования их поджатия к двум продольным плоским направляющим корпуса редуктора, позволяет практически полностью снять боковую нагрузку ходового винта, возникающую при взаимодействии зубчатого сектора руля с зубчатой рейкой каретки ходовой гайки.
При этом вследствие значительных скоростей перемещения ходовой гайки по ходовому винту, характерных для приводов управления рулевыми поверхностями скоростных беспилотных летательных аппаратов, целесообразно использовать в качестве указанного подшипника именно подшипник качения, а не подшипник скольжения.
Выполнение корпуса редуктора в районе качения двух пар подшипников в виде двух продольных плоских направляющих, образующих между собой угол при вершине 120°…160°, позволяет обеспечить плоскопараллельность движения каретки ходовой гайки, не позволяя ей смещаться в боковом направлении, что могло бы осуществиться в случае, если бы указанные направляющие лежали в одной плоскости.
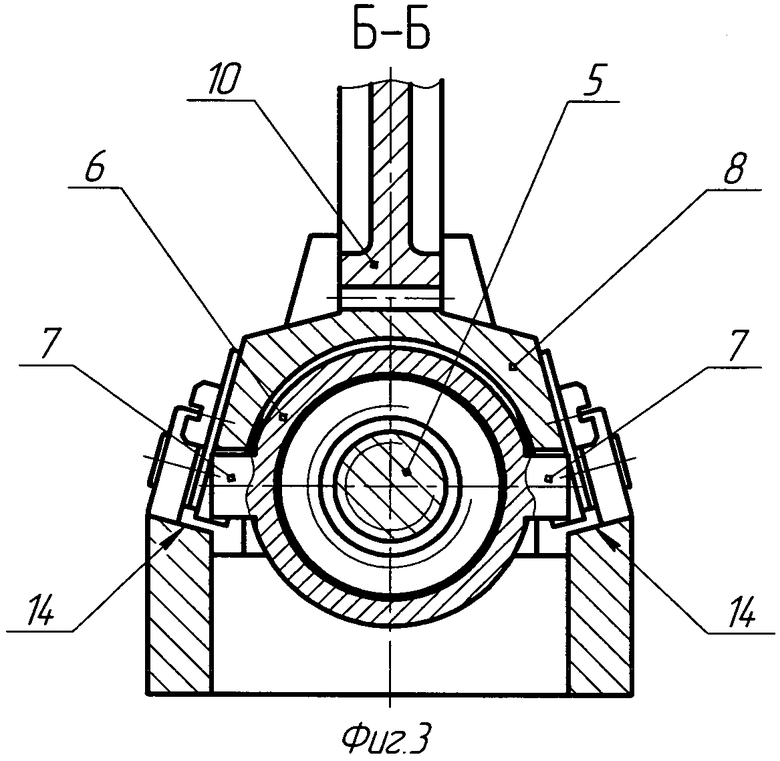
Существо изобретения поясняется чертежами, где на Фиг.1-3 представлен общий вид и сечения рулевого привода, иллюстрирующие взаимное расположение составляющих его частей.
Рулевой привод включает в себя электродвигатель 1, закрепленный через его собственный фланец на корпусе 2 промежуточного шестеренчатого редуктора 3. Выходное зубчатое колесо 4 промежуточного редуктора установлено на консольном конце ходового винта 5 шарико-винтовой передачи. Шарико-винтовая передача преобразует вращательное движение ходового винта 5 в поступательное движение ходовой гайки 6.
Ходовая гайка 6 снабжена цапфами 7, входящими в поперечные пазы каретки 8, двигающейся возвратно-поступательно по корпусу 2 вдоль оси ходового винта 5. Цапфы 7 ходовой гайки 6 предназначены для исключения ее вращательного движения при взаимодействии с ходовым винтом 5.
Каретка 8 снабжена рейкой 9, которая сопряжена с зубчатым сектором 10 вала руля для преобразования поступательного перемещения ходовой гайки во вращательное движения вала руля.
На боковых поверхностях каретки 8 с противоположной от рейки 9 стороны установлены две пары подшипников 11, каждый из которых закреплен на соответствующих эксцентриках 12, положение которых относительно каретки 8 фиксируется зажимным винтом 13. Эксцентрики 12 служат для обеспечения постоянного контакта подшипников 11 с плоскими направляющими поверхностями 14 корпуса 2 промежуточного шестеренчатого редуктора 3.
Направляющие поверхности 14 наклонены друг к другу с образованием угла 120°…160°, что обеспечивает устойчивое плоскопараллельное движения каретки 8 ходовой гайки 6 при вращении ходового винта 5. При этом ходовой винт 5 практически полностью разгружается от поперечной нагрузки со стороны зубчатого сектора 10 вала руля, поскольку она воспринимается через две пары подшипников 11 корпусом 2 промежуточного шестеренчатого редуктора 3. Таким образом, указанные подшипники благодаря своему регулируемому положению и выбранной форме направляющих корпуса редуктора являются компенсатором поперечных нагрузок ходового винта.
Предлагаемый рулевой привод работает следующим образом.
Электрический сигнал управления, поступивший на электродвигатель 1, приводит во вращение блок шестерен промежуточного редуктора 3 и ходовой винт 5 его шарико-винтовой передачи.
При этом ходовой винт 5 передает вращение на ходовую гайку 6, которая своими цапфами 7 взаимодействует с кареткой 8 и заставляет ее перемещаться вдоль оси ходового винта 5. При этом зубчатая рейка 9 каретки 8 поворачивает зубчатый сектор 13 вала руля.
Общая сила взаимодействия зубчатой рейки и зубчатого сектора выходного вала привода разлагается на осевую и поперечную силы. При этом осевая сила является рабочей, а поперечная сила стремится отжать рейку 9 от зубчатого сектора 13. Для исключения воздействия указанной поперечной составляющей силы на ходовой винт (появление его изгиба и изменение характеристик шарико-винтовой передачи в целом) используется блокатор, состоящий из двух пар подшипников качения 11, причем корпус редуктора в районе качения двух пар подшипников выполнен в виде двух продольных плоских направляющих, плоскости которых пересекаются с образованием угла 120°…160° (внутри этого угла расположена каретка ходовой гайки). Этот блокатор воспринимает указанную поперечную составляющую и не позволяет ходовому винту изгибаться в поперечном направлении. Таким образом, предлагаемая конструкция привода позволяет использовать минимальные размеры ходовых винтов (что повышает быстродействие рулевых приводов), применяя при этом простые средства для обеспечения их прочности и неизменности их геометрического профиля.
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЛЕВОЙ ПРИВОД | 2009 |
|
RU2387577C1 |
| Исполнительный механизм системы управления | 2015 |
|
RU2607490C2 |
| БЛОК РУЛЕВЫХ ПРИВОДОВ | 2008 |
|
RU2370412C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ СИСТЕМЫ УПРАВЛЕНИЯ | 2015 |
|
RU2601368C1 |
| БЛОК РУЛЕВЫХ ПРИВОДОВ | 1999 |
|
RU2154593C1 |
| Электромеханический привод руля | 2024 |
|
RU2824682C1 |
| Рулевой привод | 2024 |
|
RU2826230C1 |
| ЭЛЕКТРОПРИВОД УПРАВЛЕНИЯ РУЛЕВЫМИ ПОВЕРХНОСТЯМИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2466060C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ "ШОТА" СО СПЕЦИАЛЬНЫМ ВИНТОМ | 1990 |
|
RU2022875C1 |
| РУЛЕВОЙ МЕХАНИЗМ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА, ТРАНСПОРТНОЕ СРЕДСТВО, СПОСОБ УПРАВЛЕНИЯ РУЛЕВЫМ МЕХАНИЗМОМ И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2016 |
|
RU2692517C1 |
Изобретение относится к области приводов управления аэродинамическими поверхностями управления беспилотных летательных аппаратов и может быть использовано как при создании новых, так и при модернизации существующих летательных аппаратов. Рулевой привод содержит двигатель, редуктор, включающий размещенную в его корпусе шарико-винтовую передачу в виде ходового винта с ходовой гайкой, реечную зубчатую передачу в виде зубчатой рейки каретки, связанной с ходовой гайкой, и зубчатого сектора вала руля. При этом рулевой привод снабжен блокатором изгибных деформаций ходового винта, выполненным в виде двух пар подшипников качения, закрепленных на каретке ходовой гайки и опирающихся на корпус редуктора. Корпус редуктора в районе качения двух пар подшипников выполнен. в виде двух продольных плоских направляющих, образующих между собой угол 120°…160°. Подшипники качения установлены на каретке ходовой гайки с возможностью регулирования их поджатия к продольным плоским направляющим корпуса редуктора, например, с помощью эксцентриков. В результате повышается надежность и быстродействие рулевого привода. 1 з.п. ф-лы, 3 ил.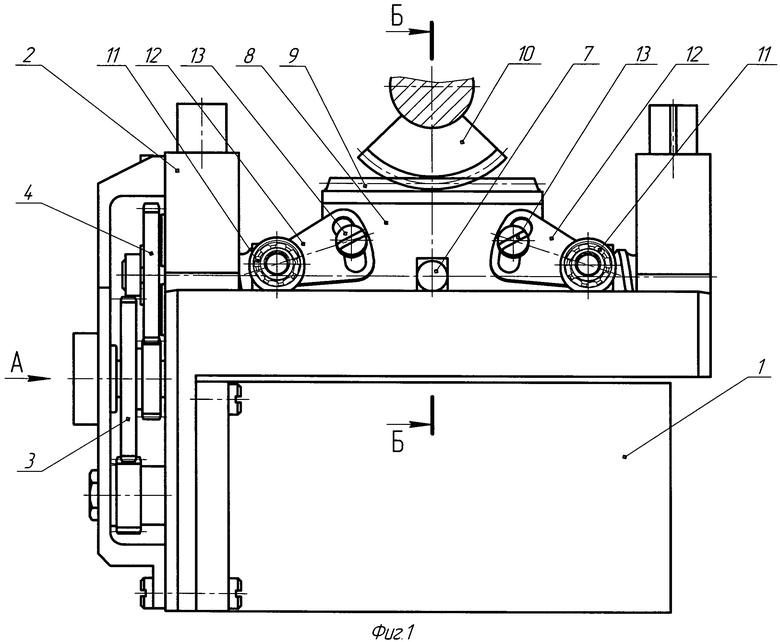
1. Рулевой привод, содержащий двигатель, редуктор, включающий размещенную в его корпусе шарико-винтовую передачу в виде ходового винта с ходовой гайкой, реечную зубчатую передачу в виде зубчатой рейки каретки, связанной с ходовой гайкой, и зубчатого сектора вала руля, отличающийся тем, что рулевой привод снабжен блокатором изгибных деформаций ходового винта, выполненным в виде двух пар подшипников качения, закрепленных на каретке ходовой гайки и опирающихся на корпус редуктора, причем корпус редуктора в районе качения двух пар подшипников выполнен в виде двух продольных плоских направляющих, образующих между собой угол 120…160°.
2. Рулевой привод по п.1, отличающийся тем, что подшипники качения установлены на каретке ходовой гайки с возможностью регулирования их поджатия к продольным плоским направляющим корпуса редуктора, например, с помощью эксцентриков.
| РУЛЕВОЙ ПРИВОД | 2009 |
|
RU2387577C1 |
| БЛОК РУЛЕВЫХ ПРИВОДОВ | 2008 |
|
RU2370412C1 |
| JP 2004249784 A, 09.09.2004 | |||
| US 4765572 A, 23.08.1988. | |||

