Изобретение относится к оптической связи и системам управления и предназначено для использования в любых устройствах, ядром или частью которых является процессор, имеющий встроенный таймер (счетчик), вывод разряда параллельного порта, вход внешнего прерывания или возможность прерывания при изменении уровня на разряде параллельного порта или вход сброса. Изобретение может быть использовано в оптических системах передачи данных, системах сбора информации, кодовых замках, устройствах охранных систем, устройствах электронных платежных средств, системах передачи данных и управления, использующих общую оптическую шину, в устройствах передачи данных, находящихся на движущихся частях и др.
Аналогами патентуемого способа являются следующие.
1. Способ, описанный в [1], для передачи фазоманипулированного сигнала, заключающийся в формировании позиционно-модулированного импульса в моменты смены фазы фазоманипулированного сигнала в передатчике и обратного преобразования в фазоманипулированный сигнал в приемнике.
Недостатками способа являются:
- возможность работы только с фазоманипулированным сигналом;
- невысокая помехоустойчивость.
2. Описанный в [2] способ синхронизации тактовой частоты приемника сигналов с позиционно-импульсной модуляцией.
Недостатками способа является следующее:
- способ требует специальной аппаратной части;
- способ не предназначен для применения с дифференциальной позиционно-импульсной модуляцией.
Аналогами патентуемого устройства являются следующие.
1. Устройства передатчика и приемника, описанные в [3], где передатчик содержит два оптических элемента И, две оптические линии задержки и два оптических объединителя. Приемник содержит две или четыре оптические линии задержки, два оптических элемента И и оптический объединитель.
Недостатками устройства являются:
- использование для передачи одного бита данных двух импульсов;
- пониженная скорость передачи из-за используемых параметров модуляции;
- невозможность изменить разновидность модуляции или ее параметры.
2. Устройство по изобретению [2], в котором описан приемник, содержащий фотоумножитель, пороговый дискриминатор, усилитель, ограничитель, петлю задержки и декодер данных.
Недостатками устройства являются:
- дороговизна фотоумножителя;
- невозможность работы с дифференциальной позиционно-импульсной модуляцией.
Наиболее близкими по технической сущности являются устройство и способ, описанные в изобретении [4], в котором передатчик содержит преобразователь сигнала из импульсно-кодовой модуляции в позиционно-импульсную, соединенный с формирователем сигнала думпера, который соединен с думпером, к которому также подсоединен лазер с модуляцией мод, а выход думпера подсоединен к волоконно-оптическому кабелю. Приемник содержит детектор, вход которого соединен с волоконно-оптической линией связи, а выход с фильтром- усилителем, выход которого подсоединен к входу синхронного порогового детектора, выход которого подсоединен к преобразователю сигнала из позиционно-импульсной модуляции в импульсно-кодовую. В свою очередь для реализации своих функций преобразователь сигналов из импульсно-кодовой модуляции в позиционно-импульсную содержит пятиразрядный счетчик, бистабильный элемент, два сдвиговых регистра, восемь элементов ИСКЛЮЧАЮЩЕЕ ИЛИ, два элемента И-НЕ, элемент НЕ, элемент ИЛИ. Преобразователь сигналов из позиционно-импульсной модуляции в импульсно-кодовую содержит пятиразрядный счетчик, бистабильный элемент, два мультиплексора и элемент ИЛИ.
В изобретении [4] предложен способ передачи двоичных данных посредством формирования сигналов, используя счетный сигнал с периодом, равным длительности позиции импульса, подсчет этих сигналов счетчиком и выдачу его в момент, когда значение счетчика будет соответствовать передаваемым в данный момент битам данных. Также предложен способ приема позиционно-модулированных импульсов, использующий подсчет счетчиком значения времени между импульсами с помощью счетного сигнала с периодом, равным длительности позиции импульса, и выдачу двоичных данных, соответствующих значению, подсчитанному в счетчике.
К недостаткам способа-прототипа относятся:
- возможность использования только одной разновидности позиционно-импульсной модуляции;
- невозможность изменить соотношения временных параметров позиционно-импульсной модуляции;
- жесткая зависимость временных параметров от тактовой частоты;
- жестко заданное количество бит данных, передаваемых одним позиционно-модулированным импульсом;
- невозможность изменить таблицу соответствия номера позиции (слота) и значений передаваемых битов данных во время работы системы.
К недостаткам устройства-прототипа относятся:
- необходимость использования в передающей схеме двух сдвиговых регистров, бистабильного элемента, счетчика, целого набора логических вентилей, выполняемые функции которых могут быть реализованы с помощью микропроцессора;
- необходимость использования в приемной схеме счетчика двух мультиплексоров с последовательным выходом, бистабильного элемента и вентиля, выполняемые функции которых могут быть реализованы с помощью микропроцессора.
Целью изобретения являются:
- снижение стоимости устройства;
- повышение эффективности передачи информации;
- повышение надежности передачи информации;
- возможность использования двух разновидностей позиционно-импульсной модуляции (дифференциальной и с постоянной скоростью) и изменения параметров модуляции в широких пределах.
В соответствии с целью изобретения для передачи информации используется две разновидности позиционно-импульсной модуляции (ПИМ) оптического сигнала - дифференциальная ПИМ и ПИМ с постоянной скоростью передачи, известная в литературе как позиционная модуляция. Наиболее эффективно цель изобретения достигается с использованием дифференциальной ПИМ. Рассматриваемое устройство может использовать для передачи и(или) приема одну из этих разновидностей либо может использовать обе разновидности, в последнем случае необходима однозначная процедура переключения режимов дифференциальной ПИМ и ПИМ с постоянной скоростью. Такое переключение может осуществляться передаваемой оптическими импульсами командой. Суть способа приема и передачи состоит в том, чтобы передавать информацию и команды, с помощью процессора модулируя интервал времени между передними фронтами дискретных оптических импульсов и принимать информацию и команды, с помощью процессора измеряя интервал времени между передними фронтами соседних дискретных оптических импульсов и определяя по нему значение данных или команду (далее по тексту предполагается, что интервал времени между импульсами есть интервал времени между передними фронтами импульсов). Для передачи и приема устройство использует встроенный в процессор таймер (счетчик) и определенное соответствие величины интервала времени между передними фронтами соседних оптических импульсов и значением данных или команды. Это соответствие присутствует в виде таблицы S.
Суть способа заключается в следующем.
При поступлении позиционно-модулированного импульса на вход прерывания процессора INT или вход разряда параллельного порта процессора Pi, или вход сброса процессора RESET из встроенного в процессор таймера (счетчика) извлекается значение T. Далее, если для извлечения значения T таймер останавливается, то в таймер помещается округленное до целого значение  , где TST - время, необходимое процессору для остановки таймера, извлечению из него значения T и помещению в него округленного до целого значения
, где TST - время, необходимое процессору для остановки таймера, извлечению из него значения T и помещению в него округленного до целого значения  и запуска таймера, τ - время увеличения значения таймера на единицу, на которое настроен таймер, если же для извлечения значения T таймер не останавливается, то в него помещается округленное до целого значение
и запуска таймера, τ - время увеличения значения таймера на единицу, на которое настроен таймер, если же для извлечения значения T таймер не останавливается, то в него помещается округленное до целого значение  , где TL - время, необходимое процессору для помещения в таймер значения округленного до целого
, где TL - время, необходимое процессору для помещения в таймер значения округленного до целого  , или же таймер обнуляется. Если таймер обнуляется, то к T прибавляется округленное до целого
, или же таймер обнуляется. Если таймер обнуляется, то к T прибавляется округленное до целого  , где TR - время, необходимое процессору для обнуления регистров таймера. При использовании позиционно-импульсной модуляции с постоянной скоростью передачи дополнительно из T вычитается округленное до целого значение
, где TR - время, необходимое процессору для обнуления регистров таймера. При использовании позиционно-импульсной модуляции с постоянной скоростью передачи дополнительно из T вычитается округленное до целого значение  , где M - количество возможных позиций (слотов) позиционно-импульсной модуляции, Tпоз - длительность во времени позиции (слота), Tпред - значение, оставшееся после обработки предыдущего позиционно-модулированного импульса (см. ниже). Если в результате
, где M - количество возможных позиций (слотов) позиционно-импульсной модуляции, Tпоз - длительность во времени позиции (слота), Tпред - значение, оставшееся после обработки предыдущего позиционно-модулированного импульса (см. ниже). Если в результате  , где Tр - длительность разделяющего интервала позиционно-импульсной модуляции, то регистрируется сбой, если
, где Tр - длительность разделяющего интервала позиционно-импульсной модуляции, то регистрируется сбой, если  , то регистрируется начало передачи, если ни то ни другое, то из T вычитается
, то регистрируется начало передачи, если ни то ни другое, то из T вычитается  и далее исходя из полученного T по таблице соответствия S определяется, чему соответствует T - команде или данным. Если T соответствует команде, то номер команды помещается в буфер команд произвольного размера или регистр команд, либо эта команда выполняется процессором сразу или с задержкой. Если T соответствует данным, то это значение данных помещается в буфер данных произвольного размера или регистр данных, либо обрабатывается процессором сразу или с задержкой. При использовании позиционно-импульсной модуляции с постоянной скоростью дополнительно T сохраняется как Tпред.
и далее исходя из полученного T по таблице соответствия S определяется, чему соответствует T - команде или данным. Если T соответствует команде, то номер команды помещается в буфер команд произвольного размера или регистр команд, либо эта команда выполняется процессором сразу или с задержкой. Если T соответствует данным, то это значение данных помещается в буфер данных произвольного размера или регистр данных, либо обрабатывается процессором сразу или с задержкой. При использовании позиционно-импульсной модуляции с постоянной скоростью дополнительно T сохраняется как Tпред.
Передача данных и команд идет следующим образом.
Вначале передается стартовый импульс посредством формирования на выходе разряда параллельного порта P0 процессором сигнала логической "1" или логического "0" длительностью Tимп через формирователь сигнала излучателя 4, приводящий к появлению оптического сигнала длительностью Tимп на излучателях 5,51, . . .,5m. Причем интервал времени между передними фронтами этого стартового импульса и последнего переданного импульса из предыдущей последовательности должен быть больше Tр+M•Tпоз, что будет соответствовать началу передачи. Далее для каждого значения данных или команды исходя из таблицы соответствия S определяется соответствующий номер позиции (слота) L, определяется соответствующая ему длительность интервала Tинт и через время Tинт после формирования предыдущего импульса на выходе разряда параллельного порта P0 процессором формируется сигнал логической "1" или логического "0" длительностью Tимп через формирователь сигнала излучателя 4, приводящий к появлению оптического сигнала длительностью Tимп на излучателях 5,51,...,5m, излучающих дискретный оптический импульс в оптический тракт (атмосфера, вакуум, однородная или неоднородная оптическая среда), где Tинт=Tр+(L-1)•Tпоз+Δ при использовании дифференциальной позиционно-импульсной модуляции и Tинт= Tр+(L-1)•Tпоз+(M-Lпред)•Tпоз+ Δ(Tинт.i) при использовании позиционно-импульсной модуляции с постоянной скоростью, где Lпред - номер позиции (слота), соответствующий предыдущему импульсу Δ ∈ [0,Tпоз-Tимп].
При использовании дифференциальной ПИМ данные (значения данных) и команды передаются дискретными оптическими импульсами с шириной Tимп, временной интервал между передними фронтами которых Tинт меняется в зависимости от передаваемой команды или передаваемого значения данных. Последовательность данных и команд передается в виде последовательности дискретных оптических импульсов с определенным интервалом между передними фронтами соседних импульсов, фрагмент последовательности импульсов изображен на фиг. 3. Дифференциальная позиционно-импульсная модуляция характеризуется следующими параметрами:
Tимп - ширина дискретного оптического импульса;
Tр - ширина разделительного интервала, равна минимально возможному интервалу между передними фронтами дискретных оптических импульсов;
M - количество используемых позиций (слотов) дискретного оптического импульса, равно сумме количества возможных значений данных и количества команд;
Tпоз - протяженность во времени позиции (слота);
S - таблица соответствий значений данных и номеров команд номерам позиций, в которой каждому возможному значению данных и каждой возможной команде соответствует номер позиции, содержит M секций, каждая из которых соответствует одной позиции и содержит диапазон значений таймера, признак команды и значение данных или вид команды.
Исходя из определения дифференциальной ПИМ для передачи значения данных или команды необходимо по таблице S определить номер позиции (слота) L и сформировать дискретный оптический импульс шириной Tимп с интервалом времени между его передним фронтом и фронтом предыдущего импульса равным Tинт, где Tинт=Tр+ (Li-l)•Tпоз+Δ, где Δ ∈ (0,Tпоз).
Исходя из определения дифференциальной ПИМ для приема значения данных или команды необходимо определить интервал времени Tинт между передними фронтами соседних дискретных оптических импульсов A и B, вычесть из Tинт длительность разделительного интервала Tр и по полученной величине Tи определить номер позиции L, которой соответствует импульс, далее исходя из L по таблице S определить переданное значение данных или команду.
При использовании ПИМ с постоянной скоростью передачи данные (значения данных) и команды передаются дискретными оптическими импульсами с шириной Tимп, имеющими определенное положение на оси времени относительно стартового импульса, зависящее от значения данных или команды.
Позиционно-импульсная модуляция с постоянной скоростью характеризуется следующими параметрами:
Tимп - ширина дискретного оптического импульса;
Tр - ширина разделительного интервала;
M - количество используемых позиций (слотов) дискретного оптического импульса, равно сумме количества возможных значений данных и количества команд;
Tпоз - протяженность во времени позиции (слота);
TПИМ - длительность периода ПИМ;
S - таблица соответствий значений данных и номеров команд номерам позиций, в которой каждому возможному значению данных и каждой возможной команде соответствует номер позиции, в которой каждому возможному значению данных и каждой возможной команде соответствует номер позиции, содержит M секций, каждая из которых соответствует одной позиции и содержит диапазон значений таймера, признак команды и значение данных или вид команды.
В ПИМ с постоянной скоростью позиция импульса определяется не относительно предыдущего импульса, как в дифференциальной ПИМ, а относительно стартового импульса A1, с которого начинается передача последовательности (пакета) данных и команд.
Исходя из определения ПИМ с постоянной скоростью для передачи значения данных или команды необходимо по таблице S определить номер слота Li и сформировать дискретный оптический импульс Ai+1 шириной Tимп с интервалом времени между его передним фронтом и передним фронтом предыдущего импульса Ai, равным Tинт.i, где Tинт.i=Tр+(Li-1)•Tпоз+(M-Li-1+1)•Tпоз+ Δ, где Δ ∈ (0,Tпоз), причем если импульс Ai стартовый (A1), то Li-1 берется равным M+1.
Исходя из определения ПИМ с постоянной скоростью для приема значения данных или команды необходимо определить интервал времени Tинт.i между передними фронтами соседних дискретных оптических импульсов Ai и Ai+1, вычесть из Tинт.i длительность разделительного интервала Tр, прибавить к ней величину Tпоз•(M-Li-1+l) и по полученной величине Tи.i определить номер позиции Li, которой соответствует импульс, далее по Li по таблице S определяется переданное значение данных или команда.
Способ приема и передачи предназначен для определения значения принятых данных или команды исходя из измеренного с помощью встроенного в процессор таймера (счетчика) значения интервала времени Tинт между передними фронтами соседних дискретных оптических импульсов A и B или Ai и Ai-1 и для формирования последовательности дискретных оптических импульсов с интервалом времени между передними фронтами соседних импульсов, зависящим от значения передаваемых данных или команды. Интервал формируется процессором с помощью отсчитывания таймером (счетчиком) значения времени и(или) используя временные характеристики выполнения команд процессора.
В соответствии с целью изобретения в схему вместо преобразователя данных из импульсно-кодовой модуляции в позиционно-импульсную и преобразователя из позиционно-импульсной в импульсно-кодовую введен процессор, вместо формирователя думпера и думпера введена схема формирования сигнала оптических излучателей, вход которой соединен с выводом параллельного порта процессора P0, а выходы подсоединены к оптическому излучателю и m дополнительным оптическим излучателям, в роли которых могут выступать светодиоды, лазерные диоды, лазеры и другие излучающие устройства оптического диапазона. Вместо детектора, фильтра-усилителя и синхронного порогового детектора в схему введен усилитель, выход которого соединен с входом внешнего прерывания процессора INT или входом разряда параллельного порта процессора Pi либо соединен с входом двухвходового логического элемента ИЛИ, второй вход которого соединен с выходом формирователя сигнала сброса процессора, а выход соединен с входом сброса процессора RESET. А n+1 входов усилителя соединены с выходом детектора и n выходами n дополнительных детекторов. В роли детекторов могут выступать фотодиоды или любые другие фотодетекторы, преобразующие оптическое излучение в электрический сигнал. Процессор должен иметь встроенный таймер (счетчик), вход внешнего прерывания или возможность прерывания при изменении уровня на разряде параллельного порта или вход сброса.
Устройство для передачи может использовать один набор вышеперечисленных параметров ПИМ, а для приема - другой, так как рассматриваемое устройство обеспечивает гораздо большую скорость передачи данных и команд, чем приема, в основном из-за того, что интервал Tр при приеме имеет минимально возможную величину, гораздо большую, чем при передаче. Возможно использование одного набора параметров как для передачи, так и для приема.
Так как способ и устройство для передачи информации используют позиционно-импульсную модуляцию, суть которой состоит в том, чтобы модулировать интервал времени между дискретными импульсами, значит, для работы устройству необходимо корректно измерять интервалы времени между передними фронтами поступающих импульсов и корректно формировать в зависимости от значений передаваемых данных и команд интервалы времени между передними фронтами выдаваемых импульсов. Измерять время между приходящими импульсами процессор может, извлекая при поступлении импульса значение из таймера, увеличивающего или уменьшающего значение через равные промежутки времени, и использовать его для получения значения интервала времени между только поступившим и предыдущим импульсом (полученное значение интервала однозначно определяет передаваемое значение данных или команду). Для этого необходимо, чтобы процессор имел возможность прерывания при поступлении импульса на какой-то его вход, возможно использование входа внешнего прерывания, входа сброса, если при сбросе не обнуляются регистры процессора и значение таймера, возможно использование какого-либо входа разряда параллельного порта процессора, если процессор имеет возможность прерывания от изменения уровня на разряде параллельного порта.
На фиг. 1 представлена схема устройства передачи и приема информации оптическим сигналом, где:
а) - вариант схемы с использованием входа прерывания процессора;
б) - вариант схемы с использованием входа разряда параллельного порта процессора;
в) - вариант схемы с использованием входа сброса процессора;
1,11,...,1n - основной и n дополнительных фотоприемных устройств;
2 - импульсный усилитель;
3 - процессор;
4 - формирователь сигнала излучателей;
5,51,...,5m - основной и m дополнительных излучателя;
6 - двухвходовый логический вентиль ИЛИ;
7 - схема формирования сигнала сброса процессора;
INT - вход прерывания процессора;
Pi - вход разряда параллельного порта процессора;
P0 - выход разряда параллельного порта процессора;
RESET - вход сигнала сброса процессора.
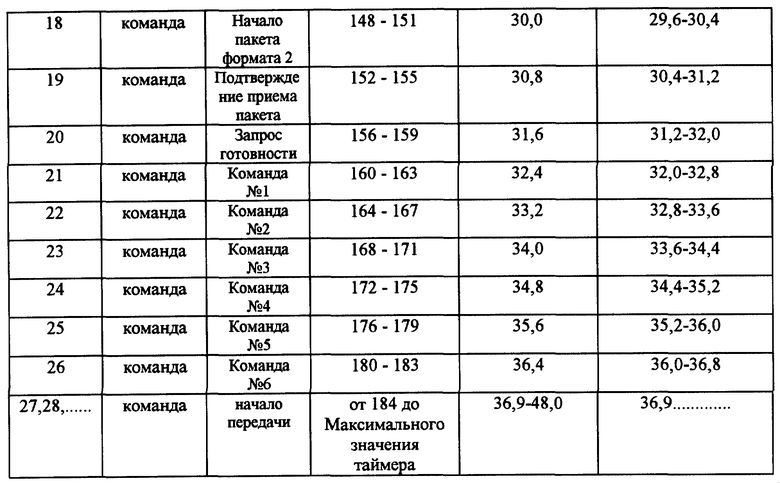
На фиг. 2 представлена диаграмма передачи информации с использованием разновидности ПИМ дифференциальная позиционно-импульсная модуляция, где:
1 - позиция (слот) номер 1;
2 - позиция (слот) номер 2;
3 - позиция (слот) номер 3;
L - позиция (слот) номер L;
M-1 - позиция (слот) номер M-1;
M - позиция (слот) номер M;
A - предыдущий позиционно-модулированный импульс;
B - последующий позиционно-модулированный импульс;
C - зона возможных положений позиционно-модулированного импульса;
Tимп - ширина позиционно-модулированного импульса;
Tр - длина разделяющего интервала позиционно-импульсной модуляции;
Tинт - интервал времени между позиционно-модулированными импульсами;
Tи - интервал времени, равный Tинт-Tр;
Tпоз - ширина позиции (слота);
M•Tпоз - длина зоны возможных положений позиционно-модулированного импульса.
На фиг. 3 представлена диаграмма - пример передачи информации с использованием разновидности ПИМ дифференциальная позиционно-импульсная модуляция, где Tинт.1, Tинт.2, Tинт.3, Tинт.4, Tинт.5, Tинт.6 обозначают временные интервалы между передними фронтами передаваемых позиционно-модулируемых импульсов.
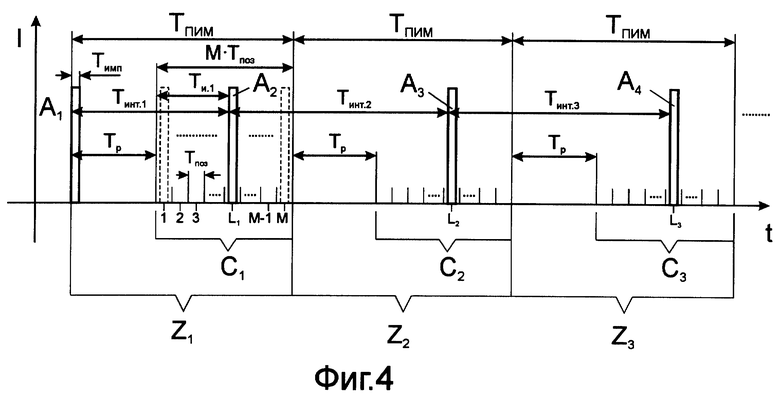
На фиг. 4 представлена диаграмма передачи информации с использованием разновидности ПИМ позиционно-импульсная модуляция с постоянной скоростью, где:
1 - позиция (слот) номер 1 первого позиционно-модулированного импульса;
2 - позиция (слот) номер 2 первого позиционно-модулированного импульса;
3 - позиция (слот) номер 3 первого позиционно-модулированного импульса;
L1 - позиция (слот) номер L1 первого позиционно-модулированного импульса;
M-1 - позиция (слот) номер M-1 первого позиционно-модулированного импульса;
M - позиция (слот) номер M первого позиционно-модулированного импульса;
L2 - позиция (слот) номер L2 второго позиционно-модулированного импульса;
L3 - позиция (слот) номер L3 третьего позиционно-модулированного импульса;
A1 - стартовый позиционно-модулированный импульс;
A1, A3, A4 - первый, второй и третий позиционно-модулированные импульсы соответственно;
C1 - зона возможных положений первого позиционно-модулированного импульса;
C2 - зона возможных положений второго позиционно-модулированного импульса;
C3 - зона возможных положений третьего позиционно-модулированного импульса;
Tимп - ширина позиционно-модулированного импульса;
Tр - длина разделяющего интервала позиционно-импульсной модуляции;
Tинт.1, Tинт.2, Tинт.3 - интервалы времени между позиционно-модулированными импульсами;
Tи.1 - интервал времени, равный Tинт.1-Tр;
Tпоз - ширина позиции (слота);
M•Tпоз - длина зоны возможных положений позиционно-модулированного импульса;
Z1, Z2, Z3 - зоны первого, второго и третьего периодов передачи позиционно-модулированных импульсов соответственно;
TПИМ - величина периода передачи позиционно-модулированных импульсов.
Устройство работает следующим образом.
Рассмотрим процесс приема устройством оптических сигналов, передающих данные и команды из какого-то внешнего устройства в рассматриваемое устройство.
В исходный момент времени процессор 3 в рассматриваемом устройстве выполняет какие-то действия, и встроенный в процессор 3 таймер (счетчик) в течение каждого периода времени τ увеличивает значение на единицу. Передаваемые каким-то внешним устройством дискретные оптические позиционно-модулированные импульсы после прохождения по оптическому каналу (атмосфера, вакуум, однородная или неоднородная оптическая среда) попадают в фотодетектор(ы) 1,11,.. .,1m и приводят к появлению на выходе(ах) фотодетектора(ов) дискретных электрических импульсов, которые попадают в усилитель 2, там усиливаются, нормируются и попадают в зависимости от варианта используемой схемы на вход внешнего прерывания процессора INT или на вход разряда параллельного порта процессора Pi или, проходя через логический элемент ИЛИ 7, попадают на вход сброса процессора RESET. Каждый из этих импульсов инициирует в процессоре 3 прерывание - сразу при поступлении импульса или какого-то его фронта или спустя небольшое время задержки. После инициирования прерывания или после сброса процессор прекращает выполнение действий, которыми был до этого занят, и переходит к приему данных и команд в соответствии с описываемым способом. При передаче совокупности данных и команд на выводе разряда параллельного порта P0 процессор формирует стартовый дискретный импульс путем выставления уровня логической единицы или логического нуля на время выбранной ширины импульса Tимп и далее для каждого значения данных и каждой команды по таблице соответствия S определяет величину соответствующего интервала времени и формирует на выводе разряда параллельного порта процессора дискретный импульс путем выставления уровня логической единицы или логического нуля на время выбранной ширины импульса так, что его передний фронт на оси времени находится на расстоянии, равном величине этого интервала, от переднего фронта предыдущего импульса. Формируемый на выводе разряда параллельного порта P0 сигнал поступает на схему формирования сигнала излучателей 4 и приводит к появлению на оптических излучателях 5,51,...,5m оптического сигнала, который испускается в оптический тракт и принимается подобными устройствами.
На диаграмме передачи при использовании дифференциальной ПИМ (фиг. 2) на оси времени справа от переднего фронта дискретного оптического импульса A отложен отрезок времени Tр, а далее один за другим отложены M отрезков длиной Tпоз, эти отрезки являются позициями дискретного оптического импульса. Всего их M (на фиг. 2 они обозначены 1,2,3,...M-1,M). Появление после дискретного оптического импульса A дискретного оптического импульса B, передний фронт которого лежит внутри позиции с номером L, будет означать, что передано значение данных или команда, соответствующая номеру позиции L в таблице S. Появление дискретного оптического импульса с передним фронтом вне зоны С означает начало передачи. Дискретный оптический импульс A является предыдущим в последовательности передаваемых импульсов, а дискретный оптический импульс B является последующим в последовательности передаваемых импульсов. Интервал времени Tинт между передними фронтами этих импульсов представляет передаваемое значение данных или команду, по нему во время приема однозначно определяется номер позиции L и далее по таблице S значение данных или команда. Для определения положения переднего фронта следующего за B дискретного оптического импульса необходимо повторить вышеописанную процедуру откладывания отрезков на оси времени от переднего фронта импульса B.
На диаграмме передачи ПИМ с постоянной скоростью (фиг. 4) на оси времени справа от переднего фронта дискретного оптического импульса A1 (стартового импульса) отложены отрезки времени Z1, Z2, Z3,... - периоды ПИМ длительностью TПИМ каждый. Каждый период Zi содержит разделительный интервал длительностью Tр и позиционную зону Ci, содержащую M отрезков длительностью Tпоз - позиций (слотов) с номерами от 1 до M. Появление дискретного оптического импульса Ai, лежащего внутри позиции с номером Li, будет означать, что передано значение данных или команда, соответствующая номеру позиции Li в таблице S. Появление дискретного оптического импульса вне любой зоны Ci и отрезка Tр означает начало передачи последовательности (пакета) данных и команд, и что этот импульс будет стартовым для последовательности. Передние фронты передаваемых дискретных оптических импульсов будут отстоять друг от друга на величину времени Tинт.i, и, определив величину интервала между передними фронтами соседних импульсов Ai и Ai+1 при приеме и имея в распоряжении величину интервала Tинт.i-1 для предыдущей пары импульсов Ai-1 и Ai, можно однозначно определить номер позиции импульса Li и далее по Li из таблицы S определить переданное значение данных или команду.
Конкретный пример выполнения способа.
Рассмотрим пример, в котором два одинаковых устройства, содержащие как составную часть схему, изображенную на фиг. 1a, обмениваются данными и командами. Используется дифференциальная ПИМ со следующими параметрами:
Tимп - 200 нс;
Tр - 16 мкс;
M-26;
Tпоз - 800 нс;
Δ = 400 нс.
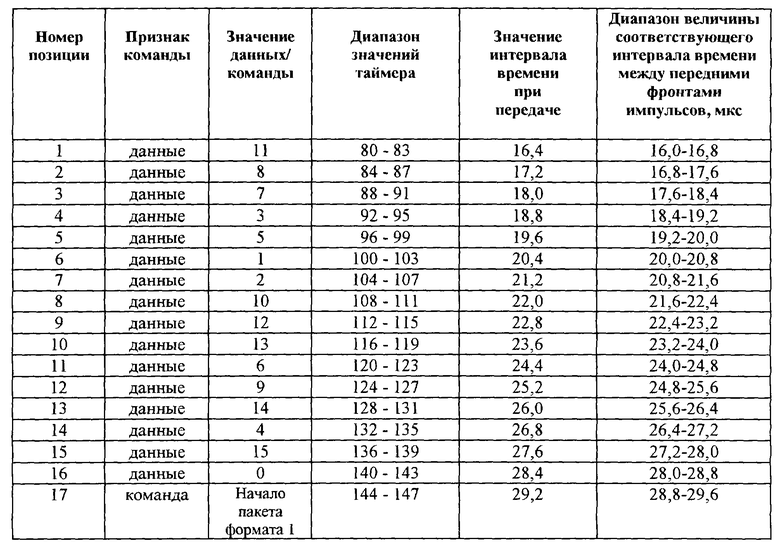
S имеет вид, приведенный в таблице.
Таймер в обоих устройствах настроен на автоувеличение на единицу каждый период τ = 200 нс. Пусть первое устройство передает команду N4, и пакет данных формата 1 длиной в 4 четырехразрядных слова данных: 3, 14, 7, 10. После этой передачи первое устройство переходит в режим приема. Второе устройство после приема команды и пакета данных передает подтверждение приема пакета.
Исходя из определения дифференциальной ПИМ и таблицы S первое устройство передает семь дискретных оптических импульсов посредством формирования сигнала логической единицы на выводе разряда параллельного порта P0 процессора с шестью интервалами между импульсами Tинт.1=34,8 мкс, Tинт.2=29,2 мкс, Tинт.3= 18,8 мкс, Tинт.4= 26,0 мкс, Tинт.5=18,0 мкс, Tинт.6=22,0 мкс (фиг. 5), интервал между импульсами равен интервалу между передними фронтами импульсов, которые через формирователь сигнала излучателей генерируют оптические сигналы такой же длительности, которые далее излучаются в оптический тракт (атмосфера, вакуум, однородная или неоднородная оптическая среда) и достигают фотодетекторов второго устройства, генерируя в них сигнал такой же формы, который после усиления поступает на вход внешнего прерывания процессора INT второго устройства.
При поступлении первого импульса из этой последовательности на вход внешнего прерывания INT процессора второго устройства процессор второго устройства останавливает таймер, извлекает из него значение, заносит в таймер константу, равную времени, в течение которого таймер остановлен для извлечения из него значения и занесения нового, выраженное в единицах периода таймера, и запускает таймер. Извлеченное значение большое (больше 183) и соответствует в таблице S команде начала передачи. Процессор второго устройства устанавливает признак начала передачи.
При поступлении второго импульса из этой последовательности на вход внешнего прерывания INT процессора второго устройства процессор второго устройства останавливает таймер, извлекает из него значение, заносит в таймер константу, равную времени, в течение которого таймер остановлен для извлечения из него значения и занесения нового, выраженное в единицах периода таймера, и запускает таймер. Извлеченное значение =173 (Tинт.1=34,8 мкс) и соответствует в таблице S команде N4. Процессор второго устройства выполняет команду N4.
При поступлении третьего импульса из этой последовательности на вход внешнего прерывания INT процессора второго устройства процессор второго устройства останавливает таймер, извлекает из него значение, заносит в таймер константу, равную времени, в течение которого таймер остановлен для извлечения из него значения и занесения нового, выраженное в единицах периода таймера, и запускает таймер. Извлеченное значение =145 (Tинт.2=29,2 мкс) и соответствует в таблице S команде начала передачи пакета формата 1. Процессор второго устройства выполняет подготовку к приему пакета формата 1.
При поступлении четвертого импульса из этой последовательности на вход внешнего прерывания INT процессора второго устройства процессор второго устройства останавливает таймер, извлекает из него значение, заносит в таймер константу, равную времени, в течение которого таймер остановлен для извлечения из него значения и занесения нового, выраженное в единицах периода таймера, и запускает таймер. Извлеченное значение =93 (Tинт.3=18,8 мкс) и соответствует в таблице S значению слова данных 3. Процессор второго устройства заносит это значение в ячейку памяти N1.
При поступлении пятого импульса из этой последовательности на вход внешнего прерывания INT процессора второго устройства процессор второго устройства останавливает таймер, извлекает из него значение, заносит в таймер константу, равную времени, в течение которого таймер остановлен для извлечения из него значения и занесения нового, выраженное в единицах периода таймера, и запускает таймер. Извлеченное значение =133 (Tинт.4=26,0 мкс) и соответствует в таблице S значению слова данных 14. Процессор второго устройства заносит это значение в ячейку памяти N2.
При поступлении шестого импульса из этой последовательности на вход внешнего прерывания INT процессора второго устройства процессор второго устройства останавливает таймер, извлекает из него значение, заносит в таймер константу, равную времени, в течение которого таймер остановлен для извлечения из него значения и занесения нового, выраженное в единицах периода таймера, и запускает таймер. Извлеченное значение =89 (Tинт.5=18,0 мкс) и соответствует в таблице S значению слова данных 7, Процессор второго устройства заносит это значение в ячейку памяти N3.
При поступлении седьмого импульса из этой последовательности на вход внешнего прерывания INT процессора второго устройства процессор второго устройства останавливает таймер, извлекает из него значение, заносит в таймер константу, равную времени, в течение которого таймер остановлен для извлечения из него значения и занесения нового, выраженное в единицах периода таймера, и запускает таймер. Извлеченное значение =109 (Tинт.6=22,0 мкс) и соответствует в таблице S значению слова данных 10. Процессор второго устройства заносит это значение в ячейку памяти N4. Так как все четыре слова пакета приняты, регистрируется конец передачи пакета данных.
Далее первое устройство переходит в режим приема, а второе устройство переходит в режим передачи. Процессор второго устройства передает два дискретных импульса шириной 200 нс с интервалом времени между их передними фронтами 30,8 мкс, что соответствует команде подтверждения приема пакета, которые через формирователь сигнала излучателей генерируют оптические сигналы такой же длительности, которые излучаются в оптический тракт и достигают фотодетекторов первого устройства, генерируя в них сигнал такой же формы, который после усиления поступает на вход внешнего прерывания процессора INT первого устройства.
При поступлении первого импульса из этой последовательности на вход внешнего прерывания INT процессора первого устройства процессор первого устройства останавливает таймер, извлекает из него значение, заносит в таймер константу, равную времени, в течение которого таймер остановлен для извлечения из него значения и занесения нового, выраженное в единицах периода таймера, и запускает таймер. Извлеченное значение большое (больше 183) и соответствует в таблице S команде начала передачи. Процессор первого устройства устанавливает признак начала передачи.
При поступлении второго импульса на вход внешнего прерывания INT процессора первого устройства процессор первого устройства останавливает таймер, извлекает из него значение, заносит в таймер константу, равную времени, в течение которого таймер остановлен для извлечения из него значения и занесения нового, выраженное в единицах периода таймера, и запускает таймер. Извлеченное значение = 153 (Tинт.1=30,8 мкс) и соответствует в таблице S команде подтверждения приема пакета. Процессор первого устройства регистрирует прием этого подтверждения и конец передачи пакета.
На этом сеанс связи заканчивается.
Введение процессора, который является стандартным устройством с невысокой стоимостью, позволяет достичь цели снижения стоимости устройства за счет использования относительно недорогих типов процессоров. Дополнительно стоимость устройства снижается за счет удешевления стоимости его разработки, так как разработка и отладка программы процессора, как правило, дешевле разработки и отладки устройства, состоящего из логических схем и программируемых логических схем.
Введение процессора позволяет реализовать возможность использования двух разновидностей позиционно-импульсной модуляции (дифференциальной и с постоянной скоростью) и изменения параметров модуляции в широких пределах.
Повышение эффективности передачи становится здесь возможным, если значениям данных и командам ставить в соответствие номер позиции исходя из средней вероятности его появления, чем выше частота появления в тракте, тем меньший номер позиции соответствует этому значению или команде и тем меньшe величина Tинт. При таком соответствии при неизменных параметрах ПИМ (кроме S) средняя скорость передачи повышается.
Варьируя параметры Tр, Tпоз и Tимп можно устанавливать компромисс между скоростью передачи и дальностью. Увеличивая Tр, Tпоз и уменьшая Tимп, можно увеличить скважность передаваемых оптических импульсов и соответственно увеличить испускаемую излучателем мощность и соответственно дальность передачи.
Повышение надежности передачи достигается с помощью введенных позиций, соответствующих не значениям данных, а командам. Эти команды могут использоваться для контроля и управления целостностью передаваемых данных, формирования пакетов данных и команд.
Дополнительно надежность передачи увеличивается из-за упрощения структуры передаваемых пакетов данных, упрощения алгоритма обработки поступающих данных, так как в описываемом устройстве присутствует однозначное соответствие сигналов с данными и командами и появляются команды, которые не передаются в виде данных, что приводит к повышению надежности передачи данных и команд.
Источники информации
1. Патент США N 5214526 "Pulse modulated infrared data communications link". Appl. N 709749 Filed: June 4, 1991, Int. C1, H 04 B 10/04, US C1 359/184.
2. Патент США N 4648133 "Synchronization tracking in pulse position modulation receiver". Appl. N 638586 Filed: Aug. 7, 1984, Int. C1, H 04 B9/00, US C1 455/608
3. Патент США N 5408351. Apr. 18, 1995 "Optical communication system". Appl. N 961606 Filled: Oct. 15, 1992, Int. C1, H 04 B 10/00, US C1. 359/186.
4. Патент США N 4584720 "Optical communication system using pulse position modulation". Appl. N 527813. Filed: Aug. 30, 1983, Int. C1, H 04 B 9/00, US C1 455/608 - прототип.
Изобретение относится к оптической связи и системам управления. Техническим результатом является повышение эффективности и надежности передачи информации. Это достигается тем, что способ приема и передачи информации оптическим сигналом включает в себя подсчет таймером интервалов времени между дискретными оптическими импульсами и отличается тем, что при поступлении дискретного импульса на вход внешнего прерывания процессора или вход разряда параллельного порта процессора или вход сброса процессора из встроенного в процессор таймера извлекается значение, из которого вычитается константа для определения интервала времени между данным и предыдущим импульсом, после чего исходя из полученного значения по таблице соответствия, содержащей для каждого значения интервала времени признак команды или данных и значение данных или вид команды, определяется полученное значение данных или вид команды соответственно, а при передаче совокупности данных и команд на выводе разряда параллельного порта процессора формируется стартовый дискретный импульс путем выставления уровня логической единицы или логического нуля на время выбранной ширины импульса, и далее для каждого значения данных и каждой команды по таблице соответствия определяется величина соответствующего интервала времени и формируется на выводе разряда параллельного порта процессора дискретный импульс путем выставления уровня логической единицы или логического нуля на время выбранной ширины импульса так, что его передний фронт на оси времени находится на расстоянии, равном величине этого интервала, от переднего фронта предыдущего импульса. Заявлено также устройство для осуществления заявленного способа. 2 c.п. ф-лы, 4 ил., 1 табл.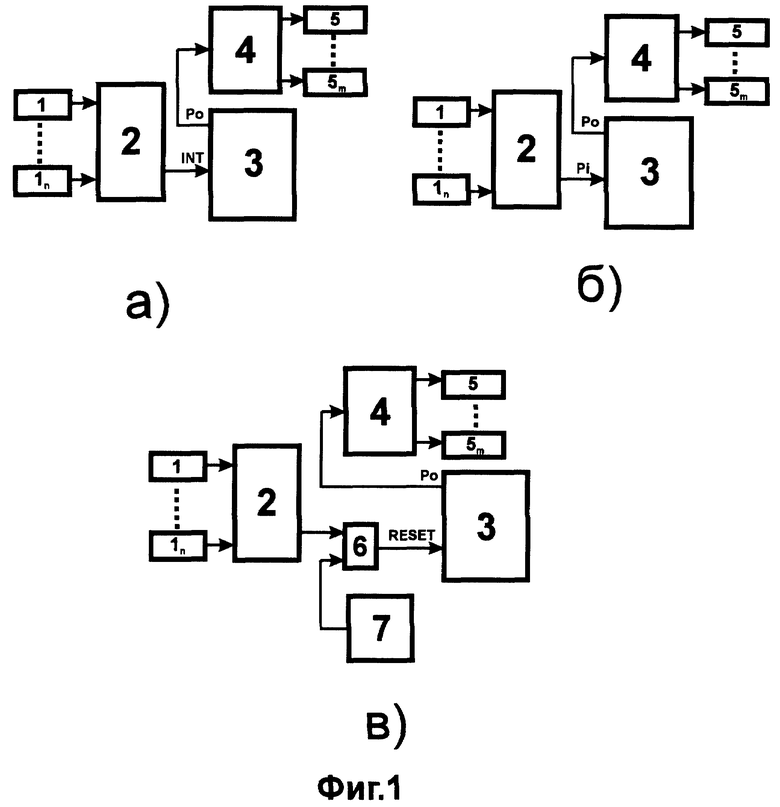
| US 5214526 A, 25.05.1993 | |||
| RU 94009057 A1, 27.12.1995 | |||
| US 4648133 A, 03.03.1987 | |||
| US 4584720 A, 22.04.1986 | |||
| US 5519556 A, 21.05.1996 | |||
| DE 4109019 A1, 24.09.1992 | |||
| ЕРКОВИЧ С.П | |||
| Оптическая обработка информации | |||
| - М.: Мир, 1996, с.230-293 | |||
| КАЦМАН М | |||
| Лазерная космическая связь | |||
| - М.: Радио и связь, 1993, с.50-59. |

