Область техники, к которой относится изобретение
Данное изобретение относится к области приема оптических модулированных сигналов, в том числе сигналов, применяемых при измерении времени прохождения сигналом расстояния от источника излучения сигнала к устройству оптического приема сигнала, в устройствах связи с использованием псевдошумовых оптических сигналов, включающих в себя генератор тактового сигнала, оптическое приемное устройство, работающее в нелинейном режиме, блок согласованной фильтрации, модуль порогового обнаружения сигнала, и может быть использовано, например, в навигации, в лазерной локации, рефлектометрии, локации сложных протяженных объектов, имеющих множество составных элементов, и движущихся по отношению к приемнику сигнала, для синхронизации по времени оптических линий с синхронным детектированием оптического сигнала.
В данном описании используются следующие термины.
ЛИДАР (транслитерация LIDAR англ. Light Identification Detection and Ranging — световое обнаружение и определение дальности) — технология получения и обработки информации об удалённых объектах с помощью активных оптических систем, использующих явления отражения света и его рассеяния в прозрачных и полупрозрачных средах. Лидар, как прибор представляет собой, как минимум, активный дальномер оптического диапазона. Обычно в России подобные устройства называются лазерными дальномерами и лазерными локаторами.
Оптическое излучение – электромагнитные волны, длины которых заключены в диапазоне с условными границами от 3000 µm до 0.25 µm.
ПШП, Псевдослучайные (псевдошумовые) последовательности — это полностью детерминированные цифровые последовательности, которые внешнему наблюдателю кажутся случайными.
М-последовательности. M-последовательность – это рекуррентная последовательность порядка n по модулю p, где р – простое число, порождаемая уравнением:

Рекуррентная последовательность порядка n по модулю p при любом простом p и некоторых комбинациях  принимает значения из интервала от 0 до p-1, имеет максимально возможный минимальный период равный
принимает значения из интервала от 0 до p-1, имеет максимально возможный минимальный период равный  .
.
Пример М-последовательности.
М-последовательность первого порядка по модулю 37, периода  порождается уравнением
порождается уравнением
 где,
где,
Последовательность  получена из первых 37 членов этой М-последовательности.
получена из первых 37 членов этой М-последовательности.
β= {8; 3; 15; 1; 5; 25; 14; 33; 17; 11; 18; 16; 6; 30; 2; 10; 13; 28; 29; 34; 22; 36; 32; 12; 23; 4; 20; 26; 19; 21; 31; 7; 35; 27; 24; 9; 8}.
Двоичные, позиционно модулированные (ПМ) последовательности. В иностранной литературе такие последовательности, называются - nonuniform trains, position modulated trains, non-uniformly spaced trains.
Последовательности  длины L в которой члены последовательности принимают значения 0 и 1 и только N членов последовательности принимают значение равное 1.
длины L в которой члены последовательности принимают значения 0 и 1 и только N членов последовательности принимают значение равное 1.
Члены последовательности α с номерами  ), где
), где  равны 1, а остальные члены последовательности α равны 0. Такие последовательности относятся к двоичным нерегулярным последовательностям. Последовательность
равны 1, а остальные члены последовательности α равны 0. Такие последовательности относятся к двоичным нерегулярным последовательностям. Последовательность  длины N, назовем последовательностью модулирующих сдвигов, а последовательность
длины N, назовем последовательностью модулирующих сдвигов, а последовательность  - двоичной позиционно-модулированной последовательностью (ПМ). Примером последовательности
- двоичной позиционно-модулированной последовательностью (ПМ). Примером последовательности  может служить последовательность, приведенная выше, в качестве примера М-последовательности.
может служить последовательность, приведенная выше, в качестве примера М-последовательности.
Продлим последовательность  так, что при
так, что при  и
и 
 , тогда ненормированная АКФ последовательности α Rα(i)
, тогда ненормированная АКФ последовательности α Rα(i) принимает значение, равное N при
принимает значение, равное N при  , и не более K при
, и не более K при  . Такая последовательность называется последовательность со свойством «не более K совпадений».
. Такая последовательность называется последовательность со свойством «не более K совпадений».
Двоичные последовательности, у которых K=1, называются последовательностями со свойством «не более одного совпадения».
Для примеров, рассматриваемых в патенте, принято следующее:
• Нумерация членов двоичной последовательности начинается с нулевого члена.
• Члены двоичной последовательности с номерами j, для которой верно равенство  называются членами с четными номерами.
называются членами с четными номерами.
• Члены двоичной последовательности с номерами j, для которой верно равенство  называются членами с не четными номерами.
называются членами с не четными номерами.
Если последовательность γ длины L со свойством «не более K совпадений» содержит члены равные «1», как с четными, так и нечетными номерами, разделить на две последовательности:
, состоящую из членов последовательности γ с четными номерами и последовательность
 , состоящую из членов последовательности γ с нечетными номерами, то будет верно, что для последовательностей
, состоящую из членов последовательности γ с нечетными номерами, то будет верно, что для последовательностей  и так же выполняется свойство «не более K совпадений», т. е. уровень боковых лепестков ненормированной АКФ последовательностей и не будет принимать значения более K.
и так же выполняется свойство «не более K совпадений», т. е. уровень боковых лепестков ненормированной АКФ последовательностей и не будет принимать значения более K.
Пример формирования и согласованная фильтрация двоичной ПМ последовательности со свойством не более одного совпадения.
Из модулирующей последовательности  , длины
, длины  , приведенной в примере (М-последовательности), сформируем последовательность
, приведенной в примере (М-последовательности), сформируем последовательность  длины
длины  .
.
 ,
,  ,
, 
Члены  с номерами
с номерами  , где
, где  равны 1, а остальные члены равны 0. Последовательность обладает свойством «не более одного совпадения».
равны 1, а остальные члены равны 0. Последовательность обладает свойством «не более одного совпадения».
На фиг. 1 представлена схема формирования и последующей согласованной фильтрации ПМ-последовательности. Схема состоит из блока 1 формирования ПМ последовательности  длины . Блок 1 содержит тридцать шесть последовательно включенных каскадов 1.1.
длины . Блок 1 содержит тридцать шесть последовательно включенных каскадов 1.1.
Первый вход каскада 1.1 является входом блока 1.
Второй выход каскада 1.1 блока 1 является выходом блока 1.
Первый вход каждого следующего каскада соединен с первым выходом предыдущего каскада, то есть вход блока 1.2 соединен с первым выходом блока 1.1 и т.д.
Второй выход каждого каскада соединен с вторым входом предыдущего каскада, то есть второй выход бока 1.2 соединен с вторым входом блока 1.1 и так далее.
Первый выход последнего тридцать шестого каскада 1.36 соединен с вторым входом этого же каскада 1.36.
Каждый каскад состоит из дискретной линии задержки (отмечены на схеме как позиции 1.1.2, 1.2.2, 1.3.2) и т. д. и одного элемента, выполняющего операцию дизъюнкции (или), отмечены на схеме как позиции 1.1.1, 1.2.1, 1.3.1, соединенных, как показано на схеме блока 1 на фиг. 1. Для формирования ПМ последовательности и ее последующей согласованной фильтрации на вход блока 1 подается последовательность, нулевой (в принятой нумерации) член которой равен 1, а остальные члены последовательности равны 0. Начиная с нулевого по  такт работы устройства в точке соединения блоков 1 и 2 при помощи блока записи и отображения Т1 фиг. 1 зафиксируем последовательность . Двоичная последовательность поступает на вход блока 2 (блок согласованной фильтрации).
такт работы устройства в точке соединения блоков 1 и 2 при помощи блока записи и отображения Т1 фиг. 1 зафиксируем последовательность . Двоичная последовательность поступает на вход блока 2 (блок согласованной фильтрации).
На фигуре 1 обозначено:
1 – блок формирования ПМ-последовательности длины
длины 
2 – блок согласованной фильтрации
1.1, 1.2, 1.3 … 1.36 – каскады блока 1.
2.1, 2.2, 2.3, … 2.36 – каскады блока 2.
Блок 2 (блок согласованной фильтрации) состоит из тридцати шести последовательно включенных каскадов 2.1, 2.2, … 2.36, соединенных аналогично, как в блоке 1. Каждый каскад блока 2 состоит из дискретной линии задержки (отмечены на схеме фиг.1 как 2.1.2, 2.2.2, 2.3.3, …2.36.2) и одного элемента, выполняющего сложение, соединенных как показано на фиг. 1 (отмечены на схеме фиг. 1 как 2.1.1, 2.2.1, 2.3.1, …2.36.1)
Таблица 1. Формулы для определения задержек в линии задержки каскадов блоков 1 и 2 на фиг. 1.


На фигуре 2 (верхний график) приведен фрагмент отклика на выходе согласованного фильтра блока 2, зафиксированный блоком регистрации и отображения Т2 фиг. 1 при подаче на его вход последовательности зафиксированной блоком Т1 фиг. 1. (нижний график).
Как видно, положение отсчета посл. с номером не равного нулю в последовательности на входе согласованного фильтра (вх. Блока 2) совпадает с (главным) пиком отклика на выходе согласованно фильтра, зафиксированного блоком Т2. Отсчеты, соседствующие с пиком отклика, будем называть боковыми лепестками (пика) отклика (в литературе встречается название боковые пики), а отношение их максимальной амплитуды к амплитуде пика отклика будем называть УБЛ уровнем боковых лепестков (отклика). В литературе так же используют термин уровень боковых пиков.
Модулирующая дискретная последовательность – последовательность конечной длины, номера членов которой приурочены к номерам временных позиций, на которых происходит испускание лидаром оптического импульса, если член модулирующей последовательности отличен от нуля.
 – длительность временной позиции ПИМ сигнала
– длительность временной позиции ПИМ сигнала
 - частота модуляции испускаемого оптического сигнала.
- частота модуляции испускаемого оптического сигнала.
Член модулирующей последовательности может быть, не только двоичной величиной, (0 – не испускание, 1 – испускание), но массивом данных, характеризующим форму, частоту, амплитуду и фазу испускаемого импульса, т. е. заданные характеристики оптического импульса.
Позиционно-импульсная модуляция (ПИМ). Если модулирующая последовательность является двоичной ПМ последовательностью, то модулированная ей последовательность испускаемых оптических импульсов называется позиционно модулированной последовательностью (оптических) импульсов или позиционно-импульсно модулированной (ПИМ) последовательностью (оптических) импульсов (ПИМПОИ).
В иностранной литературе такие последовательности испускаемых импульсов называются «PPM sequence». В патенте США US 8072582 приведен близкий тип модуляции последовательностей импульсов, называемый «pulse timing sequence, with pseudo-random timing».
Зондирующий сигнал – модулированная последовательность оптичеких импульсов , испускаемя лидаром.
Квантовая эффективность ξ - вероятность генерации попадающим на оптический сенсор одиночным фотоном свободного носителя, который достигнет области высокого поля, достаточного для ударной ионизации или вероятность срабатывания сенсора при попадании на поверхность сенсора одиночного фотона.
Динамическая квантовая эффективность – отношение прироста вероятности срабатывания сенсора на интервале времени  при условии увеличения числа фотонов η попадающих на поверхность сенсора на интервале времени , на величину ∆η, к величине ∆η при ∆η/η менее 0,1.
при условии увеличения числа фотонов η попадающих на поверхность сенсора на интервале времени , на величину ∆η, к величине ∆η при ∆η/η менее 0,1.
Динамический коэффициент преобразования (динамическая чувствительность) фототок/мощность. Для оптических сенсоров, работающих в режиме преобразования мощность в фототок, динамический коэффициент преобразования.
 , где
, где  фототок,
фототок,  мощность излучения, попадающая на сенсор.
мощность излучения, попадающая на сенсор.
Примером такого оптического сенсора служит матричный кремниевый фотоумножитель, в зарубежной литературе именуемый SiPM.
Динамический коэффициент преобразования фототок/мощность так же снижается при увеличении мощности излучения поступающего на поверхность сенсора.
Режим детектирования квантовым оптическим сенсором оптического сигнала, при котором показатель «динамическая квантовая эффективность» снижается в два и более или раз, или режим детектирования оптическим сенсором, работающим в режиме преобразования мощность в фототок, при котором динамический коэффициент преобразования фототок/мощность снижается в два или более раз, будем называть режимом работы сенсора в режиме насыщения или ограничения.
Порог насыщения – минимальная мощность излучения или среднее число фотонов за заданный интервал времени, поступающие на сенсор при которой сенсор работает в режиме насыщения (ограничения).
Разрешаемый объект – объект или элемент/сегмент объекта, попадающий в створ луча, в котором сосредоточено оптическое излучение, испускаемое передатчиком лидара и в створ луча, в котором сосредоточено отраженное излучение, попадающее на поверхность оптического сенсора приемника лидара.
ЭПР (эффективная поверхность рассеяния) – является количественной мерой свойства разрешаемого объекта рассеивать часть оптического излучения по направлению к приемному сенсору. Энергия отраженного зондирующего сигнала, поступающая на оптический сенсор, пропорциональна ЭПР разрешаемого объекта.
Принимаемый сигнал – представляет собой, поступающую на поверхность оптического сенсора или сенсоров, если оптический сенсор содержит несколько приемных элементов, суперпозицию отраженных зондирующих сигналов от объекта/-ов расстояние, до которого/-ых измеряется, так и отраженных зондирующих сигналов от других (объектов) и шумового излучения.
В этой суперпозиции отраженные оптические сигналы поступающие на поверхность сенсора могут различаться по интенсивности, в том числе сигналы интенсивность которых недостаточна для разрешения объекта методом с которым производится сравнение, назовем «слабыми», сигналы интенсивности которых на поверхности сенсора превышают порог насыщения назовем «сильными» (т.е. к сильным сигналам относятся те сигналы в которых одиночные оптические импульсы поступающие на поверхность сенсора приводят к его срабатыванию с вероятностью близкой к 1.0) , а сигналы, интенсивности которых на поверхности сенсора не превышают порог насыщения сенсора, и при этом разрешаемые с использованием метода с которым производится сравнение назовем «ординарными».
Аналогично назовем и ЭПР объектов, и сами объекты, порождающие отраженные сигналы, как «слабые», «сильные», «ординарные».
Селективность - способность лидара разрешать (достоверно определять дальность до зондируемого объекта при помощи порогового обнаружителя) зондируемый объект или сегмент протяженного зондируемого объекта, попадающего в створ луча при наличии в створе луча других расположенных рядом объектов (элементов составного объекта) с большими ЭПР и шумового излучения, попадающего на поверхность приемного сенсора. Можно говорить, о том, что если пик отклика или пики откликов от зондируемого объекта/объектов, или элемента/элементов объекта/объектов четко выделяются на рефлектограмме над уровнем шума, боковых лепестков откликов, то лидар, использующий способ или устройство, приводящее к получению настоящей рефлектограммы, использует способ, который селективно разрешает объекты (элементы объектов) и порождает разрешаемые пики откликов на вторичной рефлектограмме.
Оптические сенсоры, работающие в режиме счетчика Гейгера
Известны сенсоры (оптические приемные элементы) для регистрации оптического излучения SSPD (Superconducting Single-Photon Detector) или сверхпроводниковые однофотонные детекторы, работающие при температурах близких к абсолютному нулю и применяемые для регистрации единичных фотонов и работающие в режиме счетчика Гейгера в диапазоне длин волн от 250 до 3000 nm. Примером такого сенсора может служить сенсор, описанный в патенте RU 2346357, опубликован в 2009 г., на основе тонкопленочных сверхпроводниковых структур. Подобного рода сенсоры характеризуются квантовой эффективностью до 80-90%, временным разрешение до 25 ps. На основе подобных приемников создаются интегральные системы регистрации, имеющие десятки каналов (пикселов). Недостатком использования SSPD сенсоров является, необходимость охлаждения сенсора до температур близких к абсолютному нулю.
Известны сенсоры регистрации оптического излучения InGaAs /InP SPAD (Indium Gallium Arsenide / Indium Phosphide Single-Photon Avalanche Diode ) или Арсенид гааллий-ииндиевые однофотонные лавинные диоды на основе, применяемые для регистрации единичных фотонов, работающих в режиме счетчика Гейгера в диапазоне длин волн от 900 до 1700 nm. По сравнению со сверхпроводящими однофотонными детекторами они не требуют дорогостоящих криогенных охладителей. Основным недостатком SPAD сенсоров является высокая вероятность повторного срабатывания сенсора после приема оптического импульса в интервале времени до 100 ns, для компенсации этого недостатка используют, особый режим работы SPAD, называемы быстрое стробирование.
Быстрое стробирование (Ultra-short gating, extremely short gating) - режим работы оптического сенсора при котором сенсор на очень короткие интервалы времени, составляющие 100-200 ps, переключают в режим счетчика Гейгера. Быстрое стробирование позволяет снизить время, в течение которого сенсор не готов к работе, за счет протекающих в нем переходных процессов, возникающих в следствии приема оптического излучения в режиме счетчика Гейгера и снизить вероятность повторного срабатывания сенсора (afterpulsing probability) при последующих после приема оптического излучения быстрых стробированиях оптического сенсора.
Быстрое стробирование может быть осуществлено различными способами. В патенте США US 7705284 предложен способ и устройство стробирования в котором на анод диода подается сумма напряжения смещения стробирующего синусоидального сигнала. В течении каждого периода стробирующего сигнала фотон может быть обнаружен на интервалне времении, в котором напряжение на аноде диода превышает напряжение пробоя и диод находится в активном состоянии (готов к приему фотона). С сопротивления в цепи катода диода снимается сигнал, представляющий суперпозицию лавинного сигнала и синусоидального сигнала. Лавинный сигнал отделяется от синосоидального на режекторном фильтре, подавляющем первую гармонику частоты стробирования. К недостаткам этого способа можно отнести то, что мгновенная эффективность приема фотона на интервале времении, в котором напряжение на аноде превышает напряжения пробоя непостоянна и определяется формой напряжения на аноде изменяемой по синусоидальному закону. Инревал времени стробирования зависит от частоты стробирования и амплитуд напряжения смещения синусоидального сигнала и самого синусоидального сигнала .
В патенте США US 9012860 описан способ и устройство для однофотонного приема в режиме быстрого стробирования. Устройство содержит два идентичных ЛПД диода, на которые через делитель сигнала на катоды диодов подается стробирующий сигнал в виде меандра и положительное напряжения смещения. Первый ЛПД диод адоптирован, как приемник излучения, а второй является холостым и используется в качестве источника, идентичного в первом емкостного переходного процесса, возникающего на первом ЛПД при подаче на него стробирующего сигнала в виде меандра. Лавинный сигнал с первого ЛПД выделяется путем вычитания из него переходного процесса, формируемого на втором ЛПД. За счет использования меандра в качестве сигнала стробирования квантовая эффективность на интервале времени, когда напряжение на диоде превышает напряжение пробоя, примерно постоянна. Интервал времени, в котором диод находится в состоянии приема фотона почти, не зависит от амплитуды меандра и напряжения смещения. Это способ приема является наиболее приемлемым для использования в описываемом изобретении, но не ограничивает его.
Быстрое стробирование позволяет принять сенсором оптическое излучение, поступающее на сенсор только на интервалах стробирования. 
Оптический сенсор. Под оптическим сенсором понимаем одиночный оптический сенсор, работающий в режиме быстрого стробирования или группу сенсоров, работающих в режиме быстрого стробирования.
Принятый оптический сигнал, рефлектограммы. Под принятым сигналом понимаем конечную дискретную последовательность, формируемую в процессе приема оптического сигнала. Каждый член этой последовательности формируется по результатам работы сенсора (или группы оптических сенсоров) на соответствующем временном интервале
В нашем случае такой сигнал также называется первичной рефлектограммой или сигналом (последовательностью) двоичного детектирования.
Под вторичной рефлектограммой понимается обработанная методом согласованной фильтрации первичная рефлектограмма. Вторичная рефлектограмма применяется для вычисления временных задержек оптического сигнала, отраженного или порождаемого зондируемым объектом.
ПК - компьютер с программным обеспечением и интерфейсными модулями предназначенный для управление стендом, имитирующим работу лидара и для обработки первичных рефлектограмм, формируемых стендом, для формирования вспомогательных последовательностей загружаемых в память блоков стенда.
Цели изобретения
Очевидным способом увеличения эффективности разрешения элементов цели со «слабыми» ЭПР является увеличение энергии зондирующих оптических импульсов, что позволяет увеличить соотношение сигнал/шум на поверхности оптического сенсора. Но часто увеличение энергии требует значительных материальных затрат или технически, на данном уровне техники, не реализуемо. В тоже время известны относительно доступные способы генерации оптического излучения, имеющие ограничения по пиковой мощности, и источники, например такие как лазерные диоды, оптико-терагерцовые преобразователи, например использующие эффект Дембера [ DOI: 10.1364/OL.428599 ].
Использование подобных источников импульсного терагерцового излучения совместно с приемниками терагерцового излучения (см., например, SSPD) в режиме быстрого стробирования с применением технических решений, описанных в настоящем патенте, позволяет создавать сканеры (лидары) для дистанционного обнаружения металлических предметов и определения их формы, например, в людской толпе, в зарослях при наличии тумана, для дистанционного определения малых концентраций газов в атмосфере и т.д.
Цель данного изобретения состоит в том, чтобы обеспечить обнаружение всех элементов зондируемого объекта в том случае, когда энергия испускаемых оптических импульсов является недостаточной для обеспечения надежного разрешения, зондируемых объектов и при этом есть ограничения по времени, отводимом на разрешение указанных объектов. Предпочтительно, чтобы время, необходимое для разрешения не превышало одного цикла зондирования.
Или, иными словами, ставится задача - улучшение селективности разрешения зондируемых объектов при ограниченной мощности зондирующего сигнала и/или длительности зондирующего сигнала.
Раскрытие изобретения
Опирающееся на это оригинальное наблюдение настоящее изобретение, главным образом, имеет целью предложить устройство для приема оптического сигнала, включающее в себя генератор тактового сигнала, соединенный с оптическим приемным устройством, работающим в нелинейном режиме, блоком согласованной фильтрации, модулем порогового обнаружения сигнала, позволяющее, по меньшей мере, сгладить, как минимум, один из указанных выше недостатков, а именно обеспечить обнаружение всех элементов зондируемого объекта в том случае, когда энергия испускаемых оптических импульсов является недостаточной для обеспечения надежного разрешения, зондируемых объектов известными методами и при этом есть ограничения по времени зондирования, что и является поставленной технической задачей настоящего изобретения.
Для достижения этой цели устройство включает в себя узел регулировки квантовой эффективности по средней частоте срабатываний сенсора и блок формирования сигнала адаптации стробирования.
Благодаря данным выгодным характеристикам появляется возможность сократить время осуществления зондирования, осуществлять зондирование всех элементов зондируемого объекта, попадающих в створ зондирующего луча одновременно.
Также изобретение относится к способам приема оптического сигнала, при котором генерируют тактовый сигнал, принимают отраженный от разрешаемого объекта сигнал оптическим приемным устройством, работающем в нелинейном режиме, имеющим блок согласованной фильтрации и модуль порогового обнаружения сигнала.
Для того, чтобы обеспечить обнаружение всех элементов зондируемого объекта в том случае, когда энергия испускаемых оптических импульсов является недостаточной для обеспечения надежного разрешения, зондируемых объектов и при этом есть ограничения по времени зондирования предлагается, согласно изобретению, добавить этап, при котором адаптируют стробирующий сигнал, регулируют квантовую эффективность по частоте срабатываний сенсора.
Благодаря данным выгодным характеристикам появляется возможность сократить время осуществления зондирования, осуществлять зондирование всех элементов зондируемого объекта, попадающих в створ зондирующего луча одновременно.
Существует вариант изобретения, в котором формирование сигнала адаптации стробирования осуществляется в процессе зондирования по результатам согласованной фильтрации фрагмента зондирующей ПИМ последовательности или отдельного зондирующего пилот-сигнала, позволяющего оценить временные задержки отраженно сигнала от элементов зондируемого объекта с «сильными» ЭПР.
Благодаря данным выгодным характеристикам появляется возможность отказаться от использования дополнительного оптического тракта необходимого для формирования сигнала адаптации стробирования.
Краткое описание чертежей
Другие отличительные признаки и преимущества данного изобретения ясно вытекают из описания, приведенного ниже для иллюстрации и не являющегося ограничительным, со ссылками на прилагаемые фигуры, на которых:
Фигура 1 показывает схему блока формирования ПИМ последовательности  и ее согласованной фильтрации.
и ее согласованной фильтрации.
Фигура 2 изображает фрагменты дискретных последовательностей, зафиксированных и отображаемых блоками Т2 (верхний график) и Т1 (нижний график). По абсциссе отложены такты работы устройства фиг. 1.
Фигура 3 изображает график, поясняющий способ формирования импульсного сигнала стробирования.
Фигура 4 показывает варианты возможного временного положения стробов (стробирующих импульсов), относительно принимаемой ПИМ последовательности (оптических) импульсов.
- график А - схематически изображает два фрагмента, принимаемого ПИМ сигнала, содержащий четыре временные позиции сигнала, четные временные позиции отмечены знаком «0», нечетные знаком «1».
- графики B, C, D, E схематически отображают периодические сигналы стробирования, отличающиеся только своим положением во времени относительно начала четных временных позиций сигнала.
Фигура 5 показывает график, где по абсциссе графиков B, C, D, E отложены номера отсчетов двоичной последовательности, полученной рассматриваемым в примере методом. На ординатах графиков B, C, D, E отложены амплитуды отсчетов, двоичной последовательности, полученной рассматриваемым в примере методом, отличающиеся положением сигналов стробирования, варианты которых приведены на графиках B, C, D, E на фигуре 4.
Фигура 6 показывает схему формирования и последующей согласованной фильтрации ПИМ последовательности.
Фигура 7 изображает фрагмент отклика фильтра (от такта 74000 до такта 76750) на выходе согласованного в точке Т2 фиг.6 (на устройстве регистрации и отображении Т2) и на выходе режекторного фильтра в точке Т3 фиг 6 (на устройстве регистрации и отображении Т3).
Фигура 8 изображает функциональную схему стенда имитации приемного и передающего тракта лидара, без функциональных блоков обработки рефлектограмм, реализуемых программно в ПК.
Фигура 9 изображает роботу блока формирования модулирующей двоичной ПМ последовательности.
Фигура 10 изображает работу блока формирования сигнала адаптации сигнала стробирования.
Фигура 11 схематически изображает устройство блока имитации сложного зондируемого объекта (БИЗО).
Фигура 12 схематически отображает связь отсчетов в последовательности двоичного детектирования (график E на фиг.13) с временными интервалами стробирования (график D) и временного положения тактовых импульсов (график B).
Фигура 13 показывает функциональную схема обработки и формирования сигналов, реализованную программно на ПК.
Фигуры 14 и 15 показывают фрагменты рефлектограммы Z, полученные после обработки первичных рефлектограмм путем согласованной фильтрацией и соответствующие им фрагменты вспомогательной последовательности 5*Y.
На фиг. 16 представлена возможная схема оптического тракта устройства формирования сигнала адаптации стробирования.
Осуществление изобретения.
Покажем, как происходит управление квантовой эффективностью ξ сенсора в режиме быстрого стробирования. Вероятность срабатывания оптического сенсора за от числа фотонов с пуассоновским распределение по времени по материалам [DOI: 10.1049/el:19840411] можно представить в виде простого уравнения (1)
(1)  , где
, где
 – вероятность срабатывания сенсора при отсутствии излучения на пов. сенсора за интервал времени (dark count probability),
– вероятность срабатывания сенсора при отсутствии излучения на пов. сенсора за интервал времени (dark count probability),
ξ - квантовая эффективность,  - среднее число фотонов, попадающее на сенсор за интервал времени .
- среднее число фотонов, попадающее на сенсор за интервал времени .
Уравнение (1) удобно представить в виде (2)
(2)  , где
, где 
При практическом применения этого уравнения число фотонов , попадающее на поверхность сенсора за время стробирования состоит из фотонов шумовой составляющей (нижний индекс N) и собственно сигнальной (нижний индекс S)
(3) 
С практической точки зрения, самопроизвольное срабатывание сенсора, выражаемое переменной  можно рассматривать, как элемент шумовой составляющей в детектируемом сигнале несмотря на то, что он связан с внутренней природой сенсора.
можно рассматривать, как элемент шумовой составляющей в детектируемом сигнале несмотря на то, что он связан с внутренней природой сенсора.
Известно, что и соответственно в режиме скоростного стробирования увеличивается при уличении показателя  путем увеличения напряжения смещения на ЛПД, работающем в режиме счетчика Гейгера, увеличения рабочей температуры сенсора и сокращения времени прошедшего от момента предшествующего срабатывания сенсора до момента начала нового стробирования.
путем увеличения напряжения смещения на ЛПД, работающем в режиме счетчика Гейгера, увеличения рабочей температуры сенсора и сокращения времени прошедшего от момента предшествующего срабатывания сенсора до момента начала нового стробирования.
На практике, под шумовой составляющей  понимают собственно сумму среднего числа шумовых фотонов, попадающих на поверхность сенсора за время стробирования обозначаемую здесь как
понимают собственно сумму среднего числа шумовых фотонов, попадающих на поверхность сенсора за время стробирования обозначаемую здесь как  и величины , характеризующей собственный шум сенсора. - эквивалентное число шумовых фотонов.
и величины , характеризующей собственный шум сенсора. - эквивалентное число шумовых фотонов.
(4) 
Вероятность срабатывания сенсора за время стробирования при отсутствии попадания на поверхность сенсора сигнального оптического импульса можно выразить уравнением:
(5) 
Вероятность срабатывания сенсора за время стробирования при попадании на поверхность сенсора сигнального оптического импульса можно выразить уравнением:
 , где
, где  =
=  /.
/.
Прирост вероятности срабатывания сенсора при попадании на поверхность сенсора оптического сигнала можно определить как 
Наличие прироста позволяет выделить из детектированного оптического сигнала путем согласованной фильтрации, информацию о времени начала поступления на оптический сенсор ПИМПОИ, например, отраженной от элемента зондируемого объекта.
При согласованной фильтрации одной ПИМ последовательности соотношение  в отсчете – пике отклика на выходе дискретного согласованного фильтра будет увеличено по сравнению с соотношением при условиях детектирования.
в отсчете – пике отклика на выходе дискретного согласованного фильтра будет увеличено по сравнению с соотношением при условиях детектирования.
Обозначим соотношение при условиях детектирования, как 
Сигнальную составляющую отклика на выходе согласованно фильтра ПИМ последовательности можно оценить, как математическое ожидание величины отсчета пика отклика на выходе согласованно фильтра равное M , где M число оптических импульсов принимаемых в режиме стробирования и вносящих вклад в формирование пика отклика согласованной фильтрации, а шумовую, как среднеквадратическое отклонение
, где M число оптических импульсов принимаемых в режиме стробирования и вносящих вклад в формирование пика отклика согласованной фильтрации, а шумовую, как среднеквадратическое отклонение  выходных отсчетов согласованного фильтра при подаче на его вход последовательности, получаемой при детектировании только шумовой составляющей .
выходных отсчетов согласованного фильтра при подаче на его вход последовательности, получаемой при детектировании только шумовой составляющей .
(7)  .
.
на для пика отклика на выходе согласованно фильтра можно записать как,
(8) 
Максимум по  достигается если выполняется условие
достигается если выполняется условие
(9)  , при
, при  и
и
(10)  при
при  .
.
Из уравнения (10) следует, что при  и заданном при оптимальной квантовой эффективности квантовой эффективности, при которой показатель
и заданном при оптимальной квантовой эффективности квантовой эффективности, при которой показатель  максимален, вероятность срабатывания сенсора от шумовой составляющей на интервале времени составит
максимален, вероятность срабатывания сенсора от шумовой составляющей на интервале времени составит  ≈ 0,63 ≈
≈ 0,63 ≈  , а с увеличением соотношения должна убывать обратно пропорционально и при
, а с увеличением соотношения должна убывать обратно пропорционально и при  ≈
≈  .
.
Пример оценки средней частоты срабатываний сенсора
ПИМПОИ содержит N ≈ 500 оптических импульсов из этих импульсов только часть в количестве M=200 по времени достижения поверхности сенсора совпадает с временными интервалами скоростного стробирования сенсора. Длительность ПИМПОИ составляет 20000/ , где
, где  – частота стробирования сенсора. Среднее число фотонов в каждом оптическом импульсе, поступающем на поверхность сенсора равно 1.
– частота стробирования сенсора. Среднее число фотонов в каждом оптическом импульсе, поступающем на поверхность сенсора равно 1.  1, Соотношение сингал/шум определяемое, как отношение среднего числа фотонов в оптическом импульсе, поступающем на интервале стробирования на поверхность сенсора к эквивалентному среднему числу шумовых фотонов, поступающих на интервале стробирования на поверхность сенсора = 1,0.
1, Соотношение сингал/шум определяемое, как отношение среднего числа фотонов в оптическом импульсе, поступающем на интервале стробирования на поверхность сенсора к эквивалентному среднему числу шумовых фотонов, поступающих на интервале стробирования на поверхность сенсора = 1,0.
Тогда, согласно уравнения (9) необходимо установить сенсора равный или не выше 0,69/1 = 69%, устанавливаем = 25% , как максимально достижимый для данного типа сенсоров.
Для = 25% получим, что

= 0,42
= 0,17/0,42 = 0,42 •14,14 = 5,87
при этом средняя частота срабатываний сенсора  составит
составит
= ( (20000-M)/20000 +
(20000-M)/20000 + M/20000)
M/20000) 
= (0,22*(20000-M)/20000 +0,39*M/20000) ≈ 0,22*
Как видно из приведенного выше примера средняя частота срабатываний сенсора определяется в основном величиной , определяемой шумовой составляющей, а она в свою очередь определяется по уравнению (5) произведением  . С повышением соотношения , величина снижается, что требует большего времени для оценки средней частоты срабатываний сенсора , поэтому применение метода целесообразно использовать при не более 5, предпочтительно не более 3.
. С повышением соотношения , величина снижается, что требует большего времени для оценки средней частоты срабатываний сенсора , поэтому применение метода целесообразно использовать при не более 5, предпочтительно не более 3.
Таким образом, при заданных: уровне шума на сенсоре и минимальном рабочем соотношении для оптимизации на выходе согласованного фильтра необходимо поддерживать фиксированную среднюю за время  частоту срабатываний сенсора, путем регулирования квантовой эффективности сенсора. Такое регулирование можно реализовать, например, при помощи контура регулирования амплитуды напряжения смещения
частоту срабатываний сенсора, путем регулирования квантовой эффективности сенсора. Такое регулирование можно реализовать, например, при помощи контура регулирования амплитуды напряжения смещения  , подаваемого в сумме с прямоугольным сигналом стробирования на ЛПД диод, эксплуатируемый в режиме счетчика Гейгера или непосредственно регулируя напряжение стробирования. Поясняющая способ формирования сигнала стробирования фигура приведена на фиг. 3.
, подаваемого в сумме с прямоугольным сигналом стробирования на ЛПД диод, эксплуатируемый в режиме счетчика Гейгера или непосредственно регулируя напряжение стробирования. Поясняющая способ формирования сигнала стробирования фигура приведена на фиг. 3.
Таблица 2 Обозначения на фиг. 3
 =
=
 =
=
 и
и 
 и интервалом полуволны стробирования равным
и интервалом полуволны стробирования равным  На фиг.3
На фиг.3  =
= 
 где
где 
Время τ определяется как время, достаточное для определения средней относительной частоты срабатываний сенсора с допустимой погрешностью. Поскольку средняя относительная частота срабатываний сенсора определяется квантовой эффективностью сенсора, то при увеличении время τ будут снижаться и колебания квантовой эффективности сенсора. Фактически, контур регулирования поддерживает близкой к уставке регулирования среднюю частоту срабатываний сенсора через управляющее воздействие на квантовую эффективность сенсора, но изменения управляющего воздействия должны быть плавными и обеспечивать минимальное относительное колебание квантовой эффективности в процессе регулирования. Относительные колебания в установившемся режиме регулирования в пределах ±5 % от среднего установившегося значения, не оказывает существенно влияния на технические характеристики приемного тракта лидара или иного устройства, использующего рассматриваемый метод.
Данный контур регулирования можно использовать при скоростном стробировании оптического сенсора, например, по способу, описанному в патенте США US 9012860.
Адаптация стробирования сенсоров.
Адаптивное стробирование можно использовать для снижения уровня ложных срабатываний сенсора, связанных с эффектом, известным как «after-pulsing probability» (APP) описанным, например, в [DOI: 10.1155/2018/9585931].
Действительно, существует проблема, заключающаяся в том, что увеличение ξ сенсора путем увеличения амплитуды напряжения в моменты работы сенсора в режиме счетчика Гейгера приводит к увеличению т. н. ложных срабатываний сенсора, как постоянно, так и дополнительно на интервале времени, необходимом для полного восстановления параметров сенсора.
Число ложных срабатываний, индуцированное приемом оптических импульсов от «сильных» и «ординарных» или «сильных» сигналов, можно снизить путем выключения сенсора из режима счетчика Гейгера в моменты предполагаемого попадания на поверхность сенсора оптических импульсов, отраженных от объектов с сильными и ординарными ЭПР (сильных и ординарных сигналов).
Стробирующий сигнал, подаваемый на сенсор, может быть адаптирован на основании априорной информации о моментах поступления на поверхность сенсора оптических «сильных» и «ординарных» оптических импульсов.
Очевидным применением адаптивного стробирования является отключение приемного сенсора в интервалы времени, задержанные относительно интервалов времени испускания оптического импульса на время, необходимое для прохождения оптического импульса от передатчика оптических импульсов к поверхности сенсора. Например, это востребовано в тех случаях, когда сенсор и передатчик оптических импульсов используют общий приемо-передающий оптический тракт. В данном случае адаптивное стробирование может быть реализовано адаптацией сигнала путем выполнения операции конъюнкции над сигналом стробирования («1» - есть стробирование сенсора, «0» - нет стробирования сенсора) и инверсированным сигналом испуская оптических импульсов («1» - нет испускания оптического импульса на интервале стробирования, «0» – есть испускание оптического импульса на интервале стробирования).
Пример №1
Представим ПИМ сигнал, который модулирован ПМ-последовательностью α из примера: «Пример формирования и согласованная фильтрация двоичной ПМ-последовательности со свойством не более одного совпадения». Число членов, отличных от нуля, с четными номерами членов в последовательности α близко к числу членов с нечетными номерами.
Длительность импульсов в ПИМ сигнале  .
.
Частота модуляции ПИМ сигнала 
Период модуляции ПИМ сигнала 
Данный ПИМ сигнал поступает на устройство синхронного детектирования, на которое также подается периодический сигнал импульсов стробирования с периодом  . (частота сигнала стробирования
. (частота сигнала стробирования  =
=  ). Длительность импульсов стробирования (стробов)
). Длительность импульсов стробирования (стробов)  , что соответствует ½ периода стробирования увеличенного ½ длительности импульсов в детектируемом ПИМ сигнале.
, что соответствует ½ периода стробирования увеличенного ½ длительности импульсов в детектируемом ПИМ сигнале.
Устройство синхронного детектирования работает по следующему принципу:
- при совпадении во времени хотя бы одного импульса ПИМ последовательности или его фрагмента длительностью не менее ½ от длительности оптического импульса и импульса стробирования (строба) по заднему фронту строба формируется логическая единица длительностью 200 ps и следом за ней логический «нуль», длительностью 200ps;
- в противном случае (если нет совпадения или совпадение во времени строба и оптического импульса составляет менее ½ от длительности импульса ПИМ сигнала) по заднему фронту строба формируются два логических нуля длительностью 200 ps. Таким образом, формируется двоичная последовательность, с временем тактового перехода 200 ps.
Назовем, подобный способ приема двоичным детектированием сигнала.
Сформированная описанным образом последовательность потактно подается на согласованный фильтр - блок 2, который изображен на фиг. 1.
Специалисту очевидно, что поскольку каждый второй отсчет в обрабатываемой последовательности — это сигнал «0», то при обработке сигнала число операций сложения можно снизить вдвое и вдвое снизить частоту выполнения поточных операций, необходимых для осуществления согласованной фильтрации. Однако, поскольку целью настоящего патента не является сокращение операций сложения при согласованной фильтрации, в описании использовано упрощенное описание устройств фильтрации.
На фиг. 4 схематически показано, как времéнное положение стробов относительно начала четных временных позиций импульсов ПИМ сигнала влияет на форму выходной двоичной последовательности (сигнала двоичного детектирования). Под четными времéнными позициями понимаем времéнные позиции, которые приурочены к четным членам последовательности α, под нечётными, которые приурочены к нечетным членам последовательности α.
На фиг. 4 (график А) схематически отображен фрагмент принимаемого ПИМ сигнала, содержащий четыре времéнные позиции импульсов (нулевую (четную), первую (нечетную), вторую (четную) и j-тую (нечётную)). На месте нулевой (четной) и j-той (нечетной) времéнной позиции импульсов отображены принимаемые импульсы, на месте первой (нечетной) и второй (четной) позиции отображено отсутствие принимаемого импульса.
На фиг. 4 (графики B, C, D, E) схематически отображены периодические сигналы стробирования, отличающиеся только своим положением во времени относительно начала четных временных позиций импульсов. Так, сигнал стробирования «B» обеспечивает стробирование только четных времéнных позиций импульсов, а сигнал стробирования «Е» - только нечётных позиций импульсов. Сигнал «С» обеспечивает стробирование четных позиций и частично нечетных. Сигнал «D» обеспечивает стробирование нечетных позиций и частично четных.
На фиг. 5. представлены сигналы (фрагменты дискретных последовательностей - рефлектограмм) на выходе рассматриваемого в примере согласованного фильтра - блок 2, который изображен на фиг. 1 с импульсной х-кой  , полученные при подаче на его вход дискретных последовательностей, полученных при двоичном детектировании ПИМ сигнала, рассматриваемого в настоящем примере, при вариантах положения стробов относительно временных позиций кода (B, C, D, E), приведенных на фиг. 4.
, полученные при подаче на его вход дискретных последовательностей, полученных при двоичном детектировании ПИМ сигнала, рассматриваемого в настоящем примере, при вариантах положения стробов относительно временных позиций кода (B, C, D, E), приведенных на фиг. 4.
Обозначения вариантов относительного положения стробов на фиг. (B, C, D, E) соответствуют обозначениям полученных на выходе согласованного фильтра фрагментам дискретных последовательностей.
Как видно из фиг. 5 - рефлектограммы B и E позволяют определить времéнное положение ПИМ последовательности (положение заднего фронта последнего импульса в принимаемой ПИМ последовательности) с точностью до ±100 ps, а рефлектограммы C и D позволяют определить положение с точностью до ±200 ps.
Таким образом, для применения в измерениях дальности точность определения расстояния до зондируемого объекта не будет превышать ±30 nm.
Практика применения ПИМ сигналов
Известно, что при зондировании объектов, применяются ПИМ последовательности импульсов, в том числе, полученные путем позиционно импульсной модуляции с использованием в качестве модулирующей последовательности двоичной, ПМ последовательности со свойством «не более одного совпадения». [«High resolution waveforms suitable for a multiple target environment»/ Resnick, Joel B/ Thesis (M.S.) --MIT, Dept. of Electrical Engineering, 1962. URI: http://hdl.handle.net/1721.1/11436].
Применение, таким образом, модулированных зондирующих сигналов позволяет, улучшить селективность разрешения зондируемых объектов после согласованной фильтрации детектированного сигнала за счет низкого уровня боковых лепестков нормированной АКФ (не более1/N), где N - число позиций в модулирующей двоичной последовательности отличных от 0 и одновременно с этим минимизировать потери в соотношении сигнал/шум для «ординарных» сигналов, выделяемых путем согласованной фильтрации, если для их приема используется приемник сигнала, работающий в режиме ограничения (limiting receiver) и на вход этого приемника поступает суперпозиция принятых детектированных сигналов от различных разрешаемых объектов. [Proc. IEEE vol. 54, p. 438-439 (1966) / DOI: 10.1109/PROC.1966.4745].
Недостаткам использования зондирующих сигналов со свойством модулирующей последовательности «не более одного совпадения» является то, длительность зондирующего сигнала  квадратично зависит от N - число ненулевых позиций в двоичной модулирующей последовательности. Согласно сведениям, приведенным в монографии [“Оптимальные дискретные сигналы”/ М.Б.Свердик / “Сов. Радио” 1975]. Длительность зондируемого сигнала
квадратично зависит от N - число ненулевых позиций в двоичной модулирующей последовательности. Согласно сведениям, приведенным в монографии [“Оптимальные дискретные сигналы”/ М.Б.Свердик / “Сов. Радио” 1975]. Длительность зондируемого сигнала  , где L – число членов в двоичной модулирующей последовательности, длительность временной позиции ПИМ сигнала.
, где L – число членов в двоичной модулирующей последовательности, длительность временной позиции ПИМ сигнала.
Этот недостаток приведет к увеличению времени зондирования и длительности зондирующего сигнала и не решает задачи сокращения времени зондирования при условии ограничения по максимальной излучаемой мощности (энергии импульса) импульсного излучателя. Дополнительно, в случае зондирования скоростной цели, существует и ограничение по длительности зондирующего сигнала, связанные с его допплеровским «растягиванием» или «сжатием» в зависимости оттого, удаляется или приближается к сенсору зондируемый объект. Условия, ограничивающие рамки применения «доплеровской» модели, следующие:  где, C - скорость света, L– число членов в двоичной модулирующей последовательности,
где, C - скорость света, L– число членов в двоичной модулирующей последовательности,  - скорость модуля радиус-вектора цели. К примеру, если = 6000 m/c, то
- скорость модуля радиус-вектора цели. К примеру, если = 6000 m/c, то  . Этот недостаток можно преодолеть. Так, например, пусть групповая цель движется по направлению к приемнику (сенсору), при этом отраженные сигналы от элементов цели поступающие на сенсор от элементов цели «сжимается». Для компенсации этого «сжатия»/ «растяжения» необходимо всего лишь увеличить/уменьшить частоту синхроимпусов стробирования сенсоров. Новая частота синхроимпульсов стробирования будет определяться следующим образом:
. Этот недостаток можно преодолеть. Так, например, пусть групповая цель движется по направлению к приемнику (сенсору), при этом отраженные сигналы от элементов цели поступающие на сенсор от элементов цели «сжимается». Для компенсации этого «сжатия»/ «растяжения» необходимо всего лишь увеличить/уменьшить частоту синхроимпусов стробирования сенсоров. Новая частота синхроимпульсов стробирования будет определяться следующим образом:  где
где  частота стробирования без поправки на радиальную скорость.
частота стробирования без поправки на радиальную скорость.
Для компенсации доплеровского эффекта, в блок-схеме лидара или иного приемного устройства должен быть предусмотрен блок формирования синхроимпульсов с частотой  (блок формирования синхроимпульсов приема).
(блок формирования синхроимпульсов приема).
Сократить длительность зондируемого сигнала можно если отказаться от использования ПИМ последовательностей со свойством «не более одного совпадения», заменим их последовательностями со свойством не более «K совпадений». Это позволит сократить длительность зондируемого сигнала примерно в K раз, но при этом увеличивается уровень боковых лепестков АКФ функции зондируемых сигналов в К раз, следовательно, объекты с малыми ЭПР отклики от которых на рефлектограмме (отклике на выходе согласованного фильтра) меньше или соразмерены с уровнем боковых лепестков, от откликов от объектов с «сильными» ЭПР и не будут разрешены.
Пример №2
На фиг. 6 представлена схема формирования и последующей согласованной фильтрации ПИМ последовательности.
Блок 3 формирования ПИМ последовательности длины L=L1+L2-1=2017+74629-1=76645 состоит из двух последовательно включенных блоков формирования ПИМ последовательностей, 3.1 и 3.2, где
блок 3.1 формирует последовательность длины , а
блок 3.2 формирует последовательность длины  .
.
 ,
,  ,
,
 ,
,  ,
,
Блок 4 согласованной фильтрации ПИМ последовательности длины L состоит из последовательно включенных блоков 4.1 и 4.2 согласованной фильтрации,
блок 4.1 - для последовательности длины ,
блок 4.2 - для последовательности длины .
При последовательном включении получается согласованный фильтр для ПИМ последовательности длины L=L1+L2-1=2017+74629-1=76645.
Каждый из блоков формирования ПИМ последовательности 3.1 и 3.2 и блоков согласованной фильтрации 4.1 и 4.2 состоят из тридцати шести каскадов, аналогичных тем, что изображены на фигуре 1.
Формулы для вычисления числа тактов задержки ЛЗ каждого каскада приведено в таблице 3.
Таблица 3 Формулы вычисления числа тактов задержки в ЛЗ первого и второго блоков формирования ПИМ последовательностей и третьего и четвертого блоков




Дополнительно в схему на фигуре 6 введен дискретный режекторный фильтр 5, состоящий из
- ограничителя сигнала по амплитуде 5.1,
- ФНЧ (фильтра нижних частот) 5.2 первого порядка с коэффициентом усиления по постоянной составляющей сигнала равной 1,
- усилителя 5.3 с коэффициентом усиления 10–50,
- элемента 5.4, производящего вычитание сигнала с выхода усилителя поз. 5.3 из сигнала (последовательности, отклика), поступающего на вход режекторного фильтра 5 и
- дополнительного элемента 5.5, производящего вычитание из сигнала с выхода элемента 5.4 сигнала с выхода ФНЧ 5.2.
Далее в примерах, используется аналогичный режекторный фильтр 5.
Подадим на вход схемы фиг. 6 последовательность длины  , где
, где  в которой член с номером 0, равен 1, а остальные члены равны 0.
в которой член с номером 0, равен 1, а остальные члены равны 0.
В точке Т1 будет зафиксирована последовательность той же длины, первые L членов которой являются ПИМ последовательностью, согласованной с фильтром ПИМ последовательности 4 фиг 6.
В точке T2 будет зафиксирован отклик согласованного фильтра на подачу на его вход (вход блока 3) согласованной ПИМ последовательности. На 76644-м такте (нумерация тактов начинается с нулевого такта) в точке Т2 будет зафиксирован пик отклика с амплитудой K= N2 =1369. Этому же такту соответствует последний член ПИМ последовательности, равный 1, подаваемый на вход согласованного фильтра 4 фиг 6, состоящий из последовательно включенных блоков 4.1 и 4.2. фиг 6.
Амплитуда других членов отклика (боковых лепестков) на выходе согласованного фильтра (выход блока 4.1) не будет превышать 60. Для снижения уровня боковых лепестков, примыкающих к пику отклика, используется режекторный фильтр 5 фиг 6 .. Благодаря чему амплитуда боковых лепестков снижается с до 30, что можно наблюдать по фрагменту рефлектограммы зафиксированному в точке Т3.
При использовании подобного (с добавлением режекторного фильтра 5 к блокам 4.1 и 4.2) согласованного фильтра при обработке сигналов, полученных двоичным детектированием оптического сигнала, важно отметить, что режекторный фильтр 5 так же подавляет постоянную составляющую, вызванную т. н. фоновой засветкой, «бэкграунд лайт», подающей на сенсор вместе с оптическим сигналом. Нелинейный элемент 5.1 ограничитель амплитуды поступающих на полосовой фильтр отсчетов снижает амплитуду переходных процессов при поступлении на вход режекторного фильтра 5 пика отклика. Режекторный фильтр 5 с нелинейным элементом необходимо размещать после согласованного фильтра.
Отклик, зафиксированный в точке Т2, в настоящем примере дает информацию о потерях в энергии первого сигнала (точнее числе непринятых импульсов первого сигнала) при совместном приеме со вторым сигналом, являющимся репликой первого сигнала, задержанной или опережающий первый сигнал на число тактов W, если результирующий сигнал получен дизъюнкцией первого и второго сигнала (дизъюнкция аналог совместного приема двух сингалов пороговым устройством). Для оценки числа непринятых импульсов необходимо число тактов задержки/опережения W отложить по оси Х (оси тактов/времени) от пика отклика, при этом амплитуда бокового лепестка, соответствующая расстоянию W от пика отклика, определяет число импульсов в первом сигнале, которое не будет принято т. к. сенсор будет срабатывать от импульсов второго сигнала. Таким образом, показатель УБЛ, вычисленный по рефлектограмме, зафиксированной в точке Т2 дает представление о доле потерянных отсчетов сигналом 1 если он принимается двоичным детектированием с сигналом 2, являющимся задержанной на W тактов репликой сигнала 1.
На фиг. 7 фрагмент отклика фильтра (от такта 74000 до такта 76750) на выходе согласованного в точке Т2 (на устройстве регистрации и отображении Т2) и в точке Т3 (на выходе режкторного фильтра 5). По оси абсцисс фиг. 7 отложено число тактов умноженное на  . Сформированная на выходе блока 3 ПИМ последовательность не является минимаксной в смысле минимальности уровня боковых лепестков АКФ двоичной ПИМ последовательности при заданных L и N, но описание способа ее получения и согласованной фильтрации наиболее просто и позволяет сократить описание настоящего патента.
. Сформированная на выходе блока 3 ПИМ последовательность не является минимаксной в смысле минимальности уровня боковых лепестков АКФ двоичной ПИМ последовательности при заданных L и N, но описание способа ее получения и согласованной фильтрации наиболее просто и позволяет сократить описание настоящего патента.
В данном примере мы отошли от правила «не более одного совпадения», что привело к сокращению длительности последовательно  =76645 против ожидаемой
=76645 против ожидаемой  , т.е. длительность последовательности, а следовательно, и время испускания зондирующего сигнала сократилось в 17÷20 раз, но при этом в 60 раз увеличился уровень боковых лепестков АКФ ПИМ сигнала, используемого при зондировании. В данном примере сигнал не оптимизирован по уровню боковых лепестков АКФ и используется в примере для упрощения и сокращения описания, т. к. целью настоящего изобретения не является сокращения уровня боковых лепестков АКФ ПИМ сигнала.
, т.е. длительность последовательности, а следовательно, и время испускания зондирующего сигнала сократилось в 17÷20 раз, но при этом в 60 раз увеличился уровень боковых лепестков АКФ ПИМ сигнала, используемого при зондировании. В данном примере сигнал не оптимизирован по уровню боковых лепестков АКФ и используется в примере для упрощения и сокращения описания, т. к. целью настоящего изобретения не является сокращения уровня боковых лепестков АКФ ПИМ сигнала.
Стенд имитации работы лидара
На фиг. 8 представлена функциональная схема стенда имитации приемного и передающего тракта лидара, без функциональных блоков обработки рефлектограмм, реализуемых на ПК. Первичные рефлектограммы, представляющие собой двоичные последовательности, регистрируются блоком Т4, см. фиг.8 и далее считываются, и передаются на ПК для формирования вторичных рефлектограмм.
101- Блок формирования синхроимпульса начала цикла зондирования.
102 - Блок формирования тактового сигнала.
103 - Блок формирования модулирующей двоичной ПИМ последовательности (посл. µ).
103–1 - Вход на блок 103.
103–2 - Вход для передачи на блок 103 модулирующей последовательности с ПК.
105 - Блок формирования сигнала адаптации сигнала стробирования.
105–1 – Вход на блок 105.
105–2 - Вход для передачи с ПК на блок 105 последовательности адаптации стробирования
106 - Блок адаптации сигнала стробирования.
106–3 – вход на блок 106 и блок 106–1
106–5 – вход на блок 106,
106–4 – вход (инверсионный) на блок 106–1
106–1- Элемент, выполняющий операцию конъюнкции над операндом с входа 106–3 и инверсионным значением операнда со входа 106–4.
«0» - Задатчик логического нуля блока 106
106–2 - Ключ на два положения, переключающий вход 106–4 элемента 106–1 либо к выходу задатчика логического нуля «0» (первое положение ключа - «нет адаптации стробирования»), либо к выходу 105-3 блока 105 (второе положение ключа - «адаптация стробирования»). Ключ управляется с ПК.
107 - Блок имитации сложного зондируемого объекта (БИЗО).
108 - Блок оптического приема с контуром регулирования.
108–4 - Оптический вход блока 108.
108–5 - Вход логического сигнала стробирования.
108–1 - Блок осуществления стробирования сенсора. Блок формирует сигнал определяющий, текущее состояние сенсора (режим работы) и его квантовую эффективность. Блок имеет два входа. На первый вход подается логический сигнал стробирования с блока 106.
108-1-1 вход (второй) блока 108–1 через который с блока 108–2 подается сигнал, определяющий квантовую эффективность сенсора блока 108-3.
108–2 - Контур регулирования сигнала управляющего квантовой эффективностью сенсора.
108–3 - Оптический сенсор и схема формирования сигнала двоичного детектирования. Оптический сигнал подается на блок 108–3 через вход 108–4 (первый), на второй вход (108-3-1) блока 108–3 подается управляющий сенсором сигнал с блока 108–1
108-3-1 – второй вход блока 108–3, через который подается управляющий сенсором сигнал.
SP1 - Задатчик уставки априорной амплитуды напряжения смещения сенсора блока 108–3 или задатчик априорной квантовой эффективности сенсора блока 108–3, т.к. квантовая эффективность сенсора определяется напряжением смещения. Уставка передается в задатчик с ПК (порт для передачи уставки в задатчик на фиг.8 не указан).
SP2 - Задатчик уставки средней нормированной частоты срабатываний сенсора блока 108–3. Уставка передается в задатчик с ПК (порт для передачи уставки в задатчик не указан).
SP3 – Задатчик (уставки) фиксированного напряжения смещения с амплитудой , определяющего квантовую эффективность сенсора блока 108–3 или задатчик квантовой эффективности сенсора блока 108–3. Уставка передается в задатчик с ПК (порт для передачи уставки в задатчик фиг.8 не указан).
108-2-1 - Формирователь разностного сигнала. (Элемент, производящий операцию вычитания из уставки регулирования нормированной частоты срабатываний сенсора блока 108–3 сигнала двоичного детектирования с блока 108–3)
108-2-2 - Интегратор разностного сигнала.
108-2-3 - Элемент, производящий операцию прибавления к сигналу на выходе интегратора 108-2-2 первоначального (априорного) напряжения смещения (или иного сигнала, определяющего априорную квантовую эффективностью сенсора).
108-2-4 - Ключ на два положения, переключающий вход блока 108-2-5 либо к выходу задатчика SP3 (первое положение ключа – «заданная квантовая эффективность сенсора»), либо к выходу сумматора 108-2-3 (второе положение ключа – «регулирование (подстройка) квантовой эффективности сенсора» блока 108–3). Положение ключа управляется с ПК.
108-2-5 - Ограничитель напряжения смещения ограничивающий диапазон регулирующего сигнала с блока 108–2 диапазоном [ ÷
÷ ] (или иного сигнала, регулирующего квантовую эффективностью сенсора).
] (или иного сигнала, регулирующего квантовую эффективностью сенсора).
Т4 - Блок регистрации и считывания первичной рефлектограммы.
Стенд состоит из блока 101 формирования синхроимпульса начала цикла зондирования, соединенного с блоком 102 формирования тактового сигнала, соединенного с входами блоков 106 (Блок адаптации сигнала стробирования), 105 (Блок формирования сигнала адаптации сигнала стробирования) и 103 (Блок формирования модулирующей двоичной ПИМ последовательности)
Выход блока 105 соединен через второй вход 106–5 блока 106 со входом 108-5 блока 108 (Блок приема оптического сигнала в режиме быстрого стробирования).
Выход блока 103, соединен с входом блока 107 (БИЗО) оптический выход которого соединен с оптическим входом 108–4 блока 108.
К выходу блока 108 присоединен блок регистрации и считывания первичной рефлектограммы поз. T4.
Блок 103 Формирует ПИМ последовательность импульсов.
Блок 105 формирует сигнал адаптации стробирования, инициирующий отключение сенсора в интервалы времени поступления на сенсор «сильных» и «ординарных» или «сильных» оптических импульсов.
Блок 107 имитирует отраженный оптический сигнал от сложной цели.
Блок 106 адаптирует логический сигнал стробирования, по существу являющийся тактовым сигналом блока 108 так, чтобы в моменты поступления на оптический сенсор «сильных» и «ординарных» или «сильных» оптических импульсов сенсор блока 108–3 не находился в режиме счетчика Гейгера.
Блок 108 осуществляет двоичный прием оптических импульсов, поступающих на поверхность приемного сенсора в моменты его стробирования (нахождения в режиме счетчика Гейгера) и формирует логический сигнал двоичного детектирования.
Описание принципов работы и назначения блоков стенда
Блок 101. Формирует импульс начала цикла зондирования.
По импульсу начала цикла зондирования начинается отсчет тактовых импульсов цикла зондирования, по которым осуществляется:
1) запись сигналов блоком регистрации и считывания (передачи) первичной рефлектограммы (Т4). Такт записи составляет 400  ;
;
2) формирование ПИМ последовательности блоком 103;
3) формирование блоком 105 сигнала адаптации стробирования.
Блок 102. Блок формирует двоичную последовательность из периодически сменяющихся логических нулей и единиц. Частота перехода от единицы к нулю составляет 2,5 ГГц. Частота тактового перехода 5 ГГц.
Сигнал логической единицы на выходе блока 102 по переднему фронту -
1) на входе 106–3 блока 106–1 при условии, что сигнал на входе 106–4 блока 106-1 есть логический ноль, инициирует перевод сенсора в блоке 108 в режим счетчика Гейгера;
2) на входе 105–1 блока 105 инициирует считывание с блока 105 одного бита сигнала адаптации стробирования на вход 106–5 блока 106.
3) на входе 103–1 блока 103 инициирует считывание двух членов ПИМ последовательности из последовательной памяти блока 103 для последующего формирования блоком ПИМ последовательности импульсов, подаваемых на блок БИЗО 107.
Блок 103. Формирует ПИМ последовательность импульсов, подаваемую на блок 107 (БИЗО). Блок представляет собой устройство последовательного считывания двухбитного кода, которым представлена модулирующая последовательность. Считывание производится по переднему фронту импульса логической единицы с блока 102. Четные члены ПМ последовательности представлены первым битом кода, а нечетные вторым битом кода. После считывания двухбитного кода по тактовому переходу (генератор тактовых импульсов на функциональной схеме не указан) к логическому нулю происходит формирование четного импульса ПИМ последовательности, если первый бит кода равен «1», и с задержкой в 200 на следующем тактовом переходе (от нуля к единице) от происходит формирование нечетного импульса ПИМ последовательности импульсов, при условии, если второй бит кода равен «1». Если биты кода равны «0» формирование импульсов не осуществляется. Таким образом формируется ПИМ последовательность импульсов с частотой модуляции 5 ГГц, равной частоте тактовых импульсов. Интервал тактовых импульсов равен 200 и обозначается символом  .
.
Фигура 9 изображает работу блока 103
9A - Схематическое изображение посл. тактовых импульсов и их нумерация
9B - Схематическое изображение последовательности лог. единиц и нулей, формируемых блоком 102 фиг 8 стенда, и их нумерация.
9C - Значения двоичной модулирующая дискретная последовательность в двоичном коде и ее формальное представление в виде индексированной последовательности
в двоичном коде и ее формальное представление в виде индексированной последовательности  длины
длины 
9D - Сформированная ПИМ последовательность импульсов ее формальное представление в виде двоичной индексированной последовательности
 длины
длины . Временные позиции, соответствующие отсчетам равным нулю отмечены точками, временные позиции отсчетов равных единице отмечены вертикальными чертами.
. Временные позиции, соответствующие отсчетам равным нулю отмечены точками, временные позиции отсчетов равных единице отмечены вертикальными чертами.
Блок 105 формирует логический сигнал адаптации сигнала стробирования.
Сигнал представляет собой двоичный логический сигнал, формируемый на основании двоичной последовательности, считываемой из устройства последовательной памяти блока 105.
Считывание производится по тактовому переходу из логической единицы в логический ноль в двоичном сигнале с блока 102. Если считывается логическая единица, то на следующем переходе из логического нуля в единицу на выходе блока 105 формируется логическая единица, существующая до тактового перехода в двоичном сигнале с блока 102 с нуля в единицу. И иначе, если считывается логически ноль, то формируется логический ноль, существующий до следующего формирования логической единицы при ее считывании. Логическая единица в сигнале, как правило, приурочена к событию поступления на поверхность сенсора в блоке 108 на временном интервале стробирования длительности «сильного» или «ординарного» оптического импульса. Если ключ на два положения 106–2 находится в положении «адаптация стробирования», то сигнал логической единицы с блока 105 отменяет стробирование сенсора в блоке 108.
Фигура 10 изображает работу блока 105 и блока 106, и программного модуля 307
15А – Схематическое изображение посл. тактовых импульсов и их нумерация
15В – Схематическое изображение последовательности лог. единиц и нулей, формируемых блоком 102 стенда, и их нумерация.
15С – Значения двоичной последовательности, считываемой из памяти блока 105 δ и ее формальное представление в виде индексированной последовательности {δ (0), δ (1), δ (2) ……} длины N.
15D – Сформированный блоком 105 сигнал адаптации стробирования,
15E– адаптированный блоком 106 сигнал стробирования.
15G – формируемая программным модулем 307 двоичная последовательность при имитации адаптивного стробирования с целью вычисления вспомогательной последовательности Y.
Блок 106 – адаптирует логический сигнал стробирования, поступающий на вход 106-3 блока 106 c блока 102 путем исключения из последовательности логических нулей и единиц, логических единиц, временные позиции которых приурочены к временными позициями логических единиц в последовательности сигнала адаптации стробирования, поступающего с блока 105 на вход 106-5 блока 106. Функционально блок осуществляет операцию конъюнкции сигнала стробирования и инверсионного (в котором лог. единицы заменены нулями и наоборот) сигнала адаптации стробирования. Блок дополнен ключом на два положения позиция 106–2 на фиг.8 (положения ключа «адаптация стробирования» и «нет адаптации стробирования»), положение которого управляется программой, установленной на ПК. При положении ключа «нет адаптации стробирования» адаптация сигнала стробирования не осуществляется, на вход 106–4 блока 106-1 подается логический ноль с задатчика логического нуля, обозначенного на фиг. 8 значком «0».
Блок 107. Блок имитации сигнала от зондируемого объекта (БИЗО).
Схема блока 107 представлена на фиг. 11
На фигуре 11 обозначено:
201 - формирователь оптического зондирующего сигнала и задержки сигнала.
202 - оптический делитель сигнала (сплиттер), разделяющий сигнал на девять равных потоков.
2031 -2039 - линии задержки оптического сигнала,
204 - оптический сумматор,
2051–2053 - аттенюаторы сигнала,
207 - линии формирования сигнала, имитирующего сигнал помехи.
Блок 201 состоит из блока формирования импульсного питания лазерного диода (2011) , лазерного диода (2012) формирующего короткие импульсы длительностью до 100 , оптического аттенюатора (2013) и линию задержки в виде оптоволоконного волновода (2014) имитирующей задержку отраженного сигнала от сложного объекта.
Девять линий задержки оптического сигнала (2031, 2032, … 2039), представляющих собой оптоволоконные волноводы, задерживающих оптический сигнал на соответствующее число долей  и имитирующих задержку отраженных сигналов от отражающих элементов сложного зондируемого объекта.
и имитирующих задержку отраженных сигналов от отражающих элементов сложного зондируемого объекта.
Таблица 4. Спецификация на оптические линии задержки (ЛЗ)
К первым шести входам сумматора 204 подключены линии задержки, в порядке, перечисленном в таблице 4.
Сигналы с линий задержки 2037 и 2038, и 2039 подключены к седьмому, восьмому и девятому входам сумматора 204 через аттенюаторы 2051, 2052, 2053.
Линии формирования сигнала, имитирующего сигнал помехи 207, подключенная к десятому входу сумматора 204 состоит из формирователя напряжения питания лазерного диода 2071, лазерного диода 2072, аттенюатора сигнала 2073, соединительного оптического волновода 2074.
Лазерные диоды (2012 и 2072) и сенсор блока 108 адаптированы для работы на длине волны 1550  . Лазерный диод 2012 по сигналу с блока 103 формирует короткие импульсы длительностью до 100 . Последовательность оптических импульсов с лазерного диода 2012, имитирующая зондирующий сигнал, через аттенюатор 2013 и оптический волновод 2014 подается на вход оптического делителя сигнала 202. Через линии задержки и аттенюаторы суммируется на сумматоре 204 и смешивается на сумматоре 204 с шумовой составляющей с 207 и через дополнительный аттенюатор и оптический волновод (не указаны на фиг. 12) через вход 108-4 (фиг.8) поступают на сенсор оптического сигнала в блоке 108.
. Лазерный диод 2012 по сигналу с блока 103 формирует короткие импульсы длительностью до 100 . Последовательность оптических импульсов с лазерного диода 2012, имитирующая зондирующий сигнал, через аттенюатор 2013 и оптический волновод 2014 подается на вход оптического делителя сигнала 202. Через линии задержки и аттенюаторы суммируется на сумматоре 204 и смешивается на сумматоре 204 с шумовой составляющей с 207 и через дополнительный аттенюатор и оптический волновод (не указаны на фиг. 12) через вход 108-4 (фиг.8) поступают на сенсор оптического сигнала в блоке 108.
Сигналы с линий задержки 2031–2036 имитируют «сильные» отраженные сигналы от элементов зондируемого объекта.
Сигналы с линий задержки 2038–2039 имитируют «слабые» отраженные сигналы от элементов зондируемого объекта.
Сигналы с линии задержки 2037 имитирует «ординарный» отраженный сигнал от элементов зондируемого объекта.
Блок 108. Блок приема оптического сигнала в режиме быстрого стробирования, включая сенсор. Схема блока 108 приема с контуром регулирования приведена на фиг. 8.
Блок 108–1. Блок осуществления стробирования сенсора.
Сигнал, управляющий стробированием сенсора блока 108-3 подается на вход 108-3-1 блока 108-3 формируется блоком 108–1, на основании логического сигнала стробирования подаваемого на вход 108-5 и сигнала задающего квантовую эффективность сенсора блока 108-3 и подаваемого на вход 108-1-1 и представляет собой суперпозицию напряжения постоянного смещения с амплитудой  и прямоугольного сигнала стробирования с периодом
и прямоугольного сигнала стробирования с периодом  и длительностью импульсов стробирования и амплитудами положительной и отрицательной полуволны соответственно
и длительностью импульсов стробирования и амплитудами положительной и отрицательной полуволны соответственно  и
и  . Суммарная амплитуда
. Суммарная амплитуда  =
= определяет квантовую эффективность сенсора на интервале стробирования длительности . При этом для осуществления стробирования должно выполняться условие
определяет квантовую эффективность сенсора на интервале стробирования длительности . При этом для осуществления стробирования должно выполняться условие  =
= (см. фиг. 3 и таблицу 2). Сигнал стробирования - прямоугольный сигнал с заданными амплитудами
(см. фиг. 3 и таблицу 2). Сигнал стробирования - прямоугольный сигнал с заданными амплитудами  и
и  и длительностью импульсов стробирования формируется в этом же блоке на основании сигнала, поступающего на вход 108–5 блока 108. Времéнное положение переднего фронта импульсов стробирования совпадает с положением переднего фронта логических единиц в логическом сигнале стробирования на входе 108–5 блока 108.
и длительностью импульсов стробирования формируется в этом же блоке на основании сигнала, поступающего на вход 108–5 блока 108. Времéнное положение переднего фронта импульсов стробирования совпадает с положением переднего фронта логических единиц в логическом сигнале стробирования на входе 108–5 блока 108.
Блок 108–2. Контур регулирования сигнала управляющего квантовой эффективностью сенсора.
Регулирование средней частоты срабатывания сенсора осуществляется контуром регулирования 108–2, который
1) при снижении средней, нормированной на (частота неадаптированного сигнала стробирования) частоты срабатываний сенсора  (здесь и далее нормированные частоты обозначаются заглавной буквой
(здесь и далее нормированные частоты обозначаются заглавной буквой  ) ниже уставки средней частоты срабатываний сенсора
) ниже уставки средней частоты срабатываний сенсора  или диапазона регулирования нормированных частот [
или диапазона регулирования нормированных частот [ ÷
÷  ] увеличивает амплитуду напряжения стробирования на интервалах стробирования (сигнала стробирования формируемого блоком 108-1 и подаваемого на сенсор блока 108-3 через вход 108-3-1 ) , так чтобы текущая средняя нормированная частота срабатываний сенсора находилась в заданном диапазоне уставок регулирования [ ÷ ] или была по крайней мере максимально приближена к заданному диапазону или уставке регулирования , но таким образом чтобы
] увеличивает амплитуду напряжения стробирования на интервалах стробирования (сигнала стробирования формируемого блоком 108-1 и подаваемого на сенсор блока 108-3 через вход 108-3-1 ) , так чтобы текущая средняя нормированная частота срабатываний сенсора находилась в заданном диапазоне уставок регулирования [ ÷ ] или была по крайней мере максимально приближена к заданному диапазону или уставке регулирования , но таким образом чтобы не превышало максимально допустимого рабочим диапазоном напряжений стробирования
не превышало максимально допустимого рабочим диапазоном напряжений стробирования  ,
,
2) при увеличении средней нормированной частоты срабатываний сенсора , ниже уставки  или границы диапазона регулирования [ ÷ ], снижает амплитуду напряжения стробирования на интервалах стробирования,
или границы диапазона регулирования [ ÷ ], снижает амплитуду напряжения стробирования на интервалах стробирования,
так чтобы текущая средняя нормированная частота срабатываний сенсора находилась в заданном диапазоне уставок регулирования [ ÷ ] или была по крайней мере максимально приближена к заданному диапазону или уставке регулирования , но таким образом, чтобы не опускалось ниже  .
.
Такой контур регулирования можно выполнить, например, в виде стандартного контура регулирования, состоящего из интегрирующего регулятора (I-регулятора) сигнал на выходе которого может изменяться в диапазоне допустимых значений определяющих диапазон изменения напряжения стробирования или напряжения смещения или квантовой эффективности сенсора, а на вход подается сигнал, представляющий собой разность уставки регулирования и двоичного сигнал с выхода блока 8-3. Постоянная составляющая сигнала на выходе блока 8–3 пропорциональна нормированной частоте срабатываний сенсора. Уставка регулирования нормированной средней частоты срабатываний сенсора () формируется задатчиком SP2, по значению записываемому в него (в задатчик) из ПК.
Предпочтительная величина уставки регулирования лежит в диапазоне [0,2 ÷ 0,6]. Разница уставки регулирования нормированной средней частоты срабатываний сенсора и сигнала с выхода блока 108-3 (сигнал можно представить, как сумму постоянной составляющей сигнала и переменной) с элемента 108-2-1 подается на интегратор 108-2-2, который увеличивает сигнал на своем выходе, только если разница между уставкой и постоянной составляющей сигнала положительна и, наоборот, уменьшает, если разница отрицательна и ничего не изменяет если разница нулевая. Переменная же, составляющая сигнала, максимально подавляется интегратором 108-2-2 и не влияет на процесс регулирования. Весовой коэффициент интегрирования, выполняемого интегратором 108-2-2 обратно пропорционален постоянной τ контура регулирования. Весовой коэффициент интегрирования подбирается так, чтобы обеспечить, достаточную относительную погрешность регулирования средней нормированной частоты срабатываний сенсора и относительные колебания ξ в установившемся режиме регулирования. Для ускорения регулирования возможно динамическое изменение весового коэффициент интегрирования, так если амплитуда разностного сигнала на выходе блока 8-2-1 достаточно велика, то весовой коэффициент можно увеличить в 2–3 раза, но по мере снижения амплитуды разностного сигнала его необходимо уменьшать до начального значения.
Для ускорения процесса регулирования (подстройки квантовой эффективности сенсора) дополнительно к сигналу на выходе интегратора (108-2-2 фиг. 8) блоком 108-2-3 прибавляется уставка, формируемая задатчиком SP1. Эта уставка задает значение априорной (ожидаемой) квантовой эффективности на интервалах стробирования сенсора блока 108–3.
В сравнительных примерах блок 108–2 также может и работать и в режиме выдачи на вход 108-1-1 блока 108–1 фиксированного сигнала, амплитуда которого определяет фиксированную квантовую эффективность на интервалах стробирования сенсора блока 108–3. Этот режим используется для сравнения приема с регулированием (подстройкой) средней частоты срабатываний с приемом сигнала с постоянной квантовой эффективностью сенсора. Для переключения в этот режим используется ключ на два положения 108-2-4, в режиме фиксации квантовой эффективности на вход 108-1-1 блока 108–1 подается с задатчика сигнала SP3 сигнал уставки, амплитуда которого определяет заданную квантовую эффективность  сенсора блока 108-3. Блок 108-2-5 это ограничитель регулирующего сигнала определяющий диапазон изменения напряжения смещения и/или напряжения стробирования и/или квантовой эффективности сенсора блока 108-3
сенсора блока 108-3. Блок 108-2-5 это ограничитель регулирующего сигнала определяющий диапазон изменения напряжения смещения и/или напряжения стробирования и/или квантовой эффективности сенсора блока 108-3
Блок 108–3. Оптический сенсор и схема формирования сигнала (последовательности) двоичного детектирования.
На выходе блока 108–3 формируется сигнал двоичного детектирования, представляющий собой последовательность из логических нулей и единиц. Логическая единица соответствует событию срабатывания сенсора на интервале стробирования, логический нуль, отсутствию срабатывания сенсора на интервале стробирования. Логический сигнал со скоростью передачи информации 2.5  из блока 108–3 поступает на блок регистрации и считывания поз. Т4.
из блока 108–3 поступает на блок регистрации и считывания поз. Т4.
Блоком Т4 первый член дискетной последовательности двоичного детектирования заносится в ячейку с номером , второй в ячейку с номером  и так далее. Последний член последовательности двоичного детектирования заносится в ячейку
и так далее. Последний член последовательности двоичного детектирования заносится в ячейку  , где
, где  число членов последовательности двоичного детектирования. Так формируется последовательность двоичного детектирования
число членов последовательности двоичного детектирования. Так формируется последовательность двоичного детектирования
µ(i) длины =40000,  – номер члена последовательности двоичного детектирования.
– номер члена последовательности двоичного детектирования.
На фиг. 12 схематически отображена связь отсчетов в последовательности двоичного детектирования (график E на фиг.13) с временными интервалами стробирования (график D) и временного положения тактовых импульсов (график B).
Фиг 12:
13A – нумерация тактовых импульсов,
13В – схематическое изображение последовательности тактовых импульсов),
13С – схематическое изображение оптических импульсов, поступающих на сенсор,
13D – схематическое изображение сигнала стробирования,
13E - формируемый блоком 108 логический сигнал двоичного детектирования,
13F – нумерация отсчетов логического сигнала.
13J – последовательность двоичного детектирования μ
Средняя нормированная частота срабатываний сенсора  суть оценка вероятности срабатывания сенсора на интервале .
суть оценка вероятности срабатывания сенсора на интервале .
Величина  сигнала может быть измерена путем измерения амплитуды постоянной составляющей сигнала на выходе блока 108–3. Приведем поясняющий пример. Пусть амплитуда логической единицы на выходе блока 108–3 равна 1,0
сигнала может быть измерена путем измерения амплитуды постоянной составляющей сигнала на выходе блока 108–3. Приведем поясняющий пример. Пусть амплитуда логической единицы на выходе блока 108–3 равна 1,0 , а амплитуда логического нуля 0,0
, а амплитуда логического нуля 0,0  , а средняя частота срабатываний сенсора нормированная на частоту стробирования составляет 0,4 тогда амплитуда постоянной составляющей сигнала на выходе блока 108-3 составит 0,4*1 = 0,4 . Для поддержания на постоянном уровне частоты срабатываний сенсора нужно подать с задатчика уставки SP2 уставку равную 0,4 .
, а средняя частота срабатываний сенсора нормированная на частоту стробирования составляет 0,4 тогда амплитуда постоянной составляющей сигнала на выходе блока 108-3 составит 0,4*1 = 0,4 . Для поддержания на постоянном уровне частоты срабатываний сенсора нужно подать с задатчика уставки SP2 уставку равную 0,4 .
Функциональные схемы симуляции блоков обработки сигнала двоичного детектирования, блоков формирования сигнала адаптации стробирования, блоков формирования модулирующей ПИМ последовательности.
Часть блоков, реализуемых в практическом лидаре, на стендовой установке реализована их программной симуляций. Программной симуляцией осуществляется:
1) На цикле симуляции 1: Формирование модулирующей ПИМ последовательности в формате удобном для записи в массив памяти блока 103 стенда.
2) На цикле симуляции 2: обработка считанной с блока Т4 стенда первичной рефлектограммы или накопленной первичной рефлектограммы с получением вторичной рефлектограммы в виде массива отсчетов Z.
3) На цикле симуляции 3:
3.1) формирование последовательности адаптации стробирования δ в виде массива двоичных отсчетов в формате удобном для записи в блок 105 стенда.
3.2) формирование вспомогательной последовательности отсчетов Y. Член последовательности  равен числу интервалов стробирования, на которых происходил прием сигнала в режиме стробирования, вносящих вклад в формирование соответствующего отсчета вторичной рефлектограммы
равен числу интервалов стробирования, на которых происходил прием сигнала в режиме стробирования, вносящих вклад в формирование соответствующего отсчета вторичной рефлектограммы  . Т. е. если
. Т. е. если  = 1500, то, следовательно, отсчет вторичной рефлектограммы
= 1500, то, следовательно, отсчет вторичной рефлектограммы  с номером 100, получен путем обработки 1500 информационных (см. определение далее по тексту) отсчетов первичной рефлектограммы.
с номером 100, получен путем обработки 1500 информационных (см. определение далее по тексту) отсчетов первичной рефлектограммы.
Дополнительно, в программе реализованы интерфейсные модули, осуществляющие считывание/запись двоичных последовательностей из/в стенд имитации и блоки визуализации полученных в ходе работы стенда данных.
Функциональная схема обработки первичной рефлектограммы с получением вторичной рефлектограммы и формирования сигнала адаптации стробирования) реализованная программно имитирует (за исключением интерфейсных блоков, отвечающих за считывание/запись сигналов стенда) поблочную схему обработки первичной рефлектограммы в режиме реального времени, т.е. позволяет вычислять отсчеты вторичных рефлектограмм по мере поступления на вход схемы обработки отсчетов первичной рефлектограммы.
На фиг. 13 представлена функциональная схема обработки и формирования сигналов. На схеме программные модули, имитирующие функциональные блоки лидара и работающие при симуляции в едином цикле обведены прямоугольниками нарисованным пунктирной линией.
Спецификация к схеме фиг. 13
ИМ1 (Интерфейсный модуль1) – предназначен для считывания первичной рефлектограммы со стенда на ПК в область памяти поз. П-1.
П-1 - массив ячеек памяти для записи, хранения, накопления и считывания первичной рефлектограммы.
301 - Модуль формирования первичной рефлектограммы к виду, адаптированному для обработки согласованной фильтрацией.
302 - Модуль согласованной фильтрации предназначен для вычисления вторичной рефлектограммы.
П-2 - массив ячеек памяти для записи, хранения и считывания вторичной рефлектограммы.
303 - Модуль формирования вторичной рефлектограммы в виде, адаптированном для последующей обработки.
304 - Модуль порогового обнаружения.
305 - Модуль формирования последовательности адаптации стробирования.
306 - Модуль приведения последовательности адаптации стробирования виду удобному для записи в модуль памяти блока 105 стенда.
П-3 - массив ячеек памяти для записи, хранения и считывания последовательности адаптации стробирования.
ИМ2 - (Интерфейсный модуль 2) – предназначен для передачи последовательности адаптации стробирования для ее последующей записи в модуль памяти блока 105 стенда.
307 - Модуль формирования последовательности, являющейся аналогом адаптированного логического сигнала стробирования.
308 - Модуль формирования вспомогательной последовательности отсчетов  .
.
П-4 - массив ячеек памяти для записи, хранения и считывания для визуализации вспомогательной последовательности .
309 - Модуль формирования входной последовательности для модуля 310.
310 - Модуль формирования модулирующей ПИМ последовательности.
311 - Модуль приведения модулирующей последовательности к виду удобному для записи в модуль памяти блока 103.
П-5 - Область памяти для записи, хранения, считывания модулирующей ПИМ последовательности.
ИМ3 - (Интерфейсный модуль 3) – предназначен для передачи модулирующей последовательности, для последующей записи в модуль памяти блока 103 стенда.
Интерфейсный модуль ИМ1
Модуль ИМ1 предназначен для считывания первичной рефлектограммы в массив ячеек памяти П-1 в ПК.
По команде с блока управления производится активация рабочего цикла стенда (цикла имитации зондирования), в котором имитируется испускание и прием оптического сигнала в виде двоичной последовательности (первичной рефлектограммы), записываемой в блок памяти блока Т4 стенда. По завершении рабочего цикла стенда интерфейсный блок ИМ1 (по команде с блока управления) считывает с блока стенда Т4 первичную рефлектограмму  .
.  .
.
Далее интерфейсный блок ИМ1 считывает из ячеек памяти П-1 в ПК ранее записанную в нее рефлектограмму (или нулевые значения, заносимые в ячейки памяти П-1 перед проведением первого цикла зондирования ) и почленно прибавляет к ней считанную первичную рефлектограмму и почленно записывает результат прибавления в ячейки памяти П-1. Нумерация ячеек памяти П-1 соответствует порядку нумерации отсчетов первичной рефлектограммы. Указанная выше последовательность операций (рабочий цикл стенда – считывание – сложение - запись) осуществляется необходимое число раз от 1 до K.
В результате проведенных операций в массиве ячеек памяти П-1 формируется наколенная первичная рефлектограмма  , где индекс K обозначает число просуммированных первичных рефлектограмм.
, где индекс K обозначает число просуммированных первичных рефлектограмм.  .
.
Необходимость накопления первичной рефлектограммы обусловлена ограничением памяти для записи первичной рефлектограммы в стенде. Поэтому один продолжительный цикл имитации зондирования заменен K циклами с накоплением первичной рефлектограммы. В рассматриваемых примерах K=5 при снижении мощности оптического шумового сигнала, имитируемого на стенде лазерным диодом 2072 достаточно было бы и одного цикла работы стенда, но суть примеров показать, как работает лидар, в условиях сильных помех, для чего необходимы ПИМ последовательности большей длительности (увеличенной в К раз), что имитируется накоплением рефлектограмм.
Интерфейсный модуль ИМ2
Модуль предназначен для считывания из массива ячеек памяти П-3 и передачи на стенд для записи в ячейки памяти блока 105, последовательности адаптации стробирования  .
.
Интерфейсный модуль ИМ3
Модуль предназначен для считывания из массива ячеек памяти П-5 и передачи на стенд для записи в ячейки памяти блока 103 модулирующей последовательности в двухбитном формате  ,
,  .
.
Формирование модулирующей ПИМ последовательностью (Операции в цикле 1)
Формирование модулирующей ПИМ последовательности осуществляется в цикле 1. Переменная  - счетчик цикла,
- счетчик цикла,  если четное и иначе
если четное и иначе  если нечетное. – число членов модулирующей ПИМ последовательности.
если нечетное. – число членов модулирующей ПИМ последовательности.
В качестве модулирующей ПИМ последовательности используется последовательность длины = 76645.
Операция 309 – формирование члена входной последовательности для модуля 310. Сформированное значение присваивается переменной A. Номер члена входной последовательности для модуля 310 определяется значением переменной . Если переменная - счетчик цикла = 0, то переменная A=1, во всех остальных случаях переменная A = 0.
Операция 310 осуществляется программным модулем 310. Модуль при каждом обращении к нему имитирует один такт работы блока 3 фиг 6 формирования ПИМ последовательности длинны  Номер такта работы имитатора блока 3 (программный модуль 310) соответствует значению переменной . На каждом цикле на вход модуля 310 подается переменная A и переменная . Если
Номер такта работы имитатора блока 3 (программный модуль 310) соответствует значению переменной . На каждом цикле на вход модуля 310 подается переменная A и переменная . Если  , то значение вычислений, имитирующих один такт работы блока 3, присваивается переменной C, а если
, то значение вычислений, имитирующих один такт работы блока 3, присваивается переменной C, а если  , то значение отсчета, полученное в результате вычислений, присваивается переменной B,
, то значение отсчета, полученное в результате вычислений, присваивается переменной B,
Операция 311 - приведение модулирующей последовательности к формату удобному для записи на блок стенда 103 осуществляется программным модулем 311. Суть операции: если для переменной выполняется условие , то в массив ячеек памяти П-5 в ячейку с номером  заносится двухбитный код, первый бит которого принимает значение равное значению переменной С, а второй бит принимает значение равное значению переменной B. Таким образом, в массиве ячеек памяти П-5 формируется двоичная модулирующая дискретная последовательность ύ в формате удобном для записи в блок 103 стенда.
заносится двухбитный код, первый бит которого принимает значение равное значению переменной С, а второй бит принимает значение равное значению переменной B. Таким образом, в массиве ячеек памяти П-5 формируется двоичная модулирующая дискретная последовательность ύ в формате удобном для записи в блок 103 стенда.
Формирование вторичной рефлектограммы. (Операции в цикле 2)
Перед началом выполнения формирования вторичной рефлектограммы должна быть передана со стенда и накоплена с сохранением в ячейках памяти П-1 первичная накопленная рефлектограмма  [0; N-1].
[0; N-1].
Симуляция работы блока согласованной фильтрации осуществляется в цикле. Переменная - счетчик цикла обозначается ,  .
.
Каждый цикл моделирования приурочен к определенному временному интервалу работы стенда в цикле имитации зондирования, так переменной - счетчику цикла , если четное, соответствует временной интервал [  ;
;  ] т.е. это интервал на котором происходит стробирование сенсора, если оно не отменено сигналом адаптации стробирования (примечание: отсчет времени на стенде ведется от переднего фронта нулевого тактового импульса, формируемого на стендовой установки при имитации цикла зондирования).
] т.е. это интервал на котором происходит стробирование сенсора, если оно не отменено сигналом адаптации стробирования (примечание: отсчет времени на стенде ведется от переднего фронта нулевого тактового импульса, формируемого на стендовой установки при имитации цикла зондирования).
Если нечетное, то временной интервал [( + ; (
+ ; ( ] это интервал времени, на котором сенсор всегда выключен.
] это интервал времени, на котором сенсор всегда выключен.
Таким образом, номер переменной цикла i приурочен к номеру тактового импульса i ( график А на рис 10) синхронизирующего работу сенсора, работающего в режиме счетчика Гейгера с быстрым стробированием.
Для простоты изложения, поскольку интервалы и  примерно равны. Будем считать, что каждому циклу имитационного моделирования, соответствует в реальном времени интервал равный 200 .
примерно равны. Будем считать, что каждому циклу имитационного моделирования, соответствует в реальном времени интервал равный 200 .
Операция 301 (формирование отсчета первичной рефлектограммы)
Операция 301 выполняется модулем 301, который формирует последовательность двоичного детектирования в форме удобной для обработки (согласованной фильтрации)  длины
длины  , ∈ [0;
, ∈ [0;  ].
].
Формирование последовательности μm, как и вся обработка, происходит в цикле обработки сигнала, где переменная i - счетчик цикла обработки последовательности двоичного детектирования (цикла имитационного моделирования обработки) приурочена к номеру члена последовательности μm
Отсчеты которые соответствуют интервалам времени, на которых сенсор был включен, назовем «информационными» они могут быть равны либо нулю, либо единице, а остальные отсчеты всегда равны нулю.
При согласованной фильтрации только информационные отсчеты формируют отклик на вторичной рефлектограмме.
Формирование последовательности μm осуществляется следующим образом:
если переменная принимает четное значение, то на выходе модуля формируется отсчет  путем считывания из ячейки памяти П-1 с номером
путем считывания из ячейки памяти П-1 с номером  отсчета
отсчета  ;
;
если переменная принимает нечетное значение, то на выходе модуля формируется нулевой отсчет, т. е. 
На цикле с номером ( ∈ [ 0;] ) модулем 301 формируется член последовательности  и подается на выполнение операции 302 выполняемой модулем 302 симуляции согласованной фильтрации ПИМ последовательности длины .
и подается на выполнение операции 302 выполняемой модулем 302 симуляции согласованной фильтрации ПИМ последовательности длины .
Операция 302 (формирование отсчета вторичной рефлектограммы)
Операция 302 выполняется модулем 302 (модуль согласованной фильтрации 302). Модуль 302 имитирует работу согласованного фильтра с режекторным фильтром (последовательно соединенные блоки 4 и 5 на фиг. 6). На каждом цикле обработки с номером (переменная - счетчик цикла изменяется от 0 до 2N-1 ) на вход модуля 302 подается сформированный в модуле 301 отсчет и в том же цикле, начиная с цикла с номером  отсчеты вычисленные в модуле 302 заносятся в ячейки памяти П-2, так что в ячейке памяти с номером
отсчеты вычисленные в модуле 302 заносятся в ячейки памяти П-2, так что в ячейке памяти с номером  будет отсчет вычисленный на цикле, а в ячейке памяти
будет отсчет вычисленный на цикле, а в ячейке памяти  будет отсчет? вычисленный на
будет отсчет? вычисленный на  цикле и так далее. Таким образом, в ячейках памяти П-2 будет записан массив длины 2N-L рассматриваемый нами, как вторичная рефлектограмма
цикле и так далее. Таким образом, в ячейках памяти П-2 будет записан массив длины 2N-L рассматриваемый нами, как вторичная рефлектограмма  .
.
Так, в ячейке памяти с номером 0, будет размещаться отсчет рефлектограммы  , соответствующий временному интервалу [0; ], в ячейке с номером 1 отсчет
, соответствующий временному интервалу [0; ], в ячейке с номером 1 отсчет  соответствующий временному интервалу [; 2] и так далее.
соответствующий временному интервалу [; 2] и так далее.
Здесь речь идет об интервалах по оси задержки отраженного от разрешаемого объекта оптического сигнала.

Полученная, таким образом, последовательность может отображаться на экране ПК в виде рефлектограммы при помощи функционального модуля визуализации (модуль не отображен на фигурах).
Формирование последовательности адаптации стробирования (Операции в цикле 3)
Формирование последовательности δ для адаптации стробирования (имитационное моделирование) и вычисление функции Y, позволяющей оценить потери сигнала при приеме в режиме адаптивного стробирования для каждого отсчета на вторичной рефлектограмме.
Формирование двоичной последовательности δ используемой в качестве сигнала адаптации стробирования с блока стенда 105 осуществляется в третьем цикле обработки. Последовательность δ формируется в формате, удобном для записи ее блок стенда 105, 
Дополнительно также в третьем цикле обработки вычисляется и последовательность Y. Суть ее состоит в следующем: член последовательности с индексом k дает сумму числа интервалов стробирования, приём сигнала на которых внес вклад в формирование отсчета вторичной рефлектограммы. Поскольку в примерах используется накопленная первичная рефлектограмма
Формирование обеих последовательностей  и осуществляется в третьем цикле обработки после выполнения операций второго цикла на основании вторичной рефлектограммы записанной в массиве ячеек памяти П-2
и осуществляется в третьем цикле обработки после выполнения операций второго цикла на основании вторичной рефлектограммы записанной в массиве ячеек памяти П-2
При формировании последовательности выполняются следующие операции. (На каждом цикле вычисления k – переменная счетчик цикла изменяется от 0 до 2N-1).
Операция 303 (модуль 303 формирования вторичной рефлектограммы в виде, адаптированном для последующей обработки):
Если переменная счетчик цикла  , то отсчет, формируемый в результате выполнения операции 303 равен содержимому ячейки памяти с номером k из массива ячеек памяти П-2.
, то отсчет, формируемый в результате выполнения операции 303 равен содержимому ячейки памяти с номером k из массива ячеек памяти П-2.
Операция 304 (модуль 304 порогового обнаружения):
На цикле  результат операции 303 сравнивается с уровнем порога обнаружения - если отсчет, полученный в результате операции 3 превышает или равен уровню порогового обнаружения то формируется логический отсчет «1» и «0» если иначе.
результат операции 303 сравнивается с уровнем порога обнаружения - если отсчет, полученный в результате операции 3 превышает или равен уровню порогового обнаружения то формируется логический отсчет «1» и «0» если иначе.
Операция 305 (Модуль 305 формирования последовательности адаптации стробирования)
Модуль 305 на каждом цикле выполняет, те же вычисления, что и блок (поз. 3 на фиг. 6) формирования ПИМ последовательности длины  на каждом такте его работы. Т. е. такт работы эквивалентен одному циклу вычисления.
на каждом такте его работы. Т. е. такт работы эквивалентен одному циклу вычисления.
Операция 306. (модуль 306 децимации)
Отчет, формируемый на операции 305 на цикле вычисления k записывается в ячейку памяти поз. П -3 с номером k/2 если k четное, и наоборот, если k - нечетное, то записи не производится.
Таким образом, в ячейках памяти с номерами от 0 до N– 1 (примечание: N четное число) будет записана последовательность δ длины N передаваемая (записываемая) на блок 105.
Отбрасывание каждого второго отсчета в формируемой последовательности производится т.к. номера отбрасываемых отсчетов приурочены к номерам тактовых импульсов (нечетных), по которым не происходит формирование сигнала стробирования сенсора, работающего в режиме быстрого стробирования.
Операция 307 (модуль 307 формирования последовательности, являющейся аналогом адаптированного сигнала стробирования формирования)
Операция 307, как и операция 306 выполняется после операции 305
Суть операции 307 формирование последовательности (график 15G. См. фиг. 10) являющейся аналогом адаптированного сигнала стробирования (график 15E. См. фиг. 10).
Последовательность формируется следующим образом: если значение переменной k счетчик цикла четное и отсчет, вычисленный модулем 305 (операция 305) равен 0, то результатом операции будет «1», во всех остальных случаях результатом операции является «0».
Операция 308. (Модуль 308 формирования вспомогательной последовательности отсчетов Y)
Модуль позволяет оценить потери энергии принимаемых сигналов (ПИМ последовательностей оптических импульсов, связанные с тем, что сенсор принимает оптический сигнал включается только на интервалах стробирования, за счет чего часть оптических импульсов, поступающая на поверхность сенсора не будет принята.
Модуль вычисляет последовательность отсчетов  позволяющую оценить потери энергии для каждого отсчета вызванные тем, что прием оптического сигнала ведется только на интервалах стробирования сенсора. Так отсчет будет равен числу информационных отсчетов первичной рефлектограммы
позволяющую оценить потери энергии для каждого отсчета вызванные тем, что прием оптического сигнала ведется только на интервалах стробирования сенсора. Так отсчет будет равен числу информационных отсчетов первичной рефлектограммы  суммирование которых с весовыми коэффициентами отличными от нуля в процессе в отсчете было использовано. Поскольку обработке подвергается первичная накопленная рефлектограмма, то значения увеличиваются в K раз, где K - число циклов формирования накопленной рефлектограммы. В примерах K=5 и поэтому фиг 14 и 15 по ординате отложены значения
суммирование которых с весовыми коэффициентами отличными от нуля в процессе в отсчете было использовано. Поскольку обработке подвергается первичная накопленная рефлектограмма, то значения увеличиваются в K раз, где K - число циклов формирования накопленной рефлектограммы. В примерах K=5 и поэтому фиг 14 и 15 по ординате отложены значения  .
.
Модуль 308 имитирует работу согласованного фильтра блок 4 фиг. 6. На каждом цикле обработки с номером (  счетчик цикла изменяется от 0 до ) на вход модуля 308 подается сформированный в модуле 307 (график 15G. фиг. 10) отсчет и в том же цикле, начиная с цикла с номером отсчеты вычисленные в модуле 308 заносятся в массив ячеек памяти П-4, так что в ячейке памяти с номером будет отсчет вычисленный на цикле, а в ячейке памяти будет отсчет вычисленный на цикле и так далее. Таким образом, в массиве ячеек памяти П-4 будет записана последовательность длины
счетчик цикла изменяется от 0 до ) на вход модуля 308 подается сформированный в модуле 307 (график 15G. фиг. 10) отсчет и в том же цикле, начиная с цикла с номером отсчеты вычисленные в модуле 308 заносятся в массив ячеек памяти П-4, так что в ячейке памяти с номером будет отсчет вычисленный на цикле, а в ячейке памяти будет отсчет вычисленный на цикле и так далее. Таким образом, в массиве ячеек памяти П-4 будет записана последовательность длины  рассматриваемая нами, как вспомогательная последовательность позволяющая оценить потери энергии для каждого отсчета вызванные особенностями приема оптического сигнала сенсором, а именно его стробированием. Для каждого отсчета величина
рассматриваемая нами, как вспомогательная последовательность позволяющая оценить потери энергии для каждого отсчета вызванные особенностями приема оптического сигнала сенсором, а именно его стробированием. Для каждого отсчета величина  , где
, где  число циклов формирования накопленной рефлектограммы определяет общее число интервалов стробирования, на которых осуществлялся прием оптического сигнала внесших вклад в формирование отсчета
число циклов формирования накопленной рефлектограммы определяет общее число интервалов стробирования, на которых осуществлялся прием оптического сигнала внесших вклад в формирование отсчета
Пример 3
Практические варианты формирования сигнала адаптации стробирования
Использование дополнительного сенсора
Сигнал адаптации стробирования можно получить и с использованием дополнительного сенсора, расположенного в смежном оптическом тракте причем смежный оптический тракт устроен так, что момент времени поступления фронта волны оптического импульса на поверхность дополнительного оптического сенсора опережает момент времени поступления его на поверхность сенсора, стробирование которого адаптируется.
На фиг. 16 представлена возможная схема подобного оптического устройства. Устройство состоит из двух оптических систем: объектива 404, фокусирующего оптическое излучение на поверхности сенсора (или сенсоров) 401 и фрагмента параболического зеркала 403, фокусирующего оптическое излучение на поверхности сенсора (или сенсоров) 402. Оба сенсора располагаются в фокусе параболического сенсора рядом, как показано на фиг.16.
Оптический импульс, отраженный от зондируемого объекта, разделяется на два, первый из которых достигает поверхности сенсора 401 раньше, чем достигает поверхности сенсора 402 с отражением от параболического зеркала. Задержка во времени определяется временем прохождением отрезков пути луча A1+В1 или A2+ B2. Время прохождения этих отрезков одинаково и определяет временную задержку второго оптического импульса, попадающего на поверхность сенсора 402 по отношению к первому, попадающему на поверхность сенсора 401.
Так, если сумма длин отрезков A1 и B1 составит 20  , то задержка между временем достижения оптическим импульсом поверхности сенсора 402 и оптическим импульсом поверхности сенсора 401, составит 0,66
, то задержка между временем достижения оптическим импульсом поверхности сенсора 402 и оптическим импульсом поверхности сенсора 401, составит 0,66 , что является приемлемым временем для обработки принятого первого оптического импульса и формирования сигнала на выключение оптического сенсора 402.
, что является приемлемым временем для обработки принятого первого оптического импульса и формирования сигнала на выключение оптического сенсора 402.
Сенсор 401, принимающий только оптические импульсы повышенной энергии (соответствующие «сильным» или «сильным» и «ординарным» оптическим импульсам) попадающим на поверхность комбинированной оптической системы типа фиг. 16), формирует сигнал на отключение сенсора 402. В результате этого снижается частота срабатываний сенсора 402 при заданной квантовой эффективности сенсора 402, что позволяет вести прием оптических импульсов сенсором 402 при более высокой квантовой эффективности сенсора 402, более предпочтительным для приема «слабых» оптических импульсов. Также это позволяет одновременно устранить влияние на обнаружение «слабых» пиков откликов на вторичной рефлектограмме, получаемой обработкой сигнала с сенсора 402, боковых лепестков (боковых пиков) откликов от приема «сильных» или «сильных» и «ординарных» оптических импульсов, принимаемых только сенсором 401 и повысить защищенность тракта приема и обработки сигнала сенсора 402 от импульсных помех.
Оптический сенсор 401 и оптический сенсор 402 могут содержать несколько оптических сенсоров, на которые подаются соответствующие сигналы стробирования.
Использование пробного (пилотного) зондирующего сигнала
Другой вариант адаптивного стробирования основан на использовании информации об интервалах времени поступления на поверхность приемного сенсора «сильных» и «ординарных» оптических импульсов полученной в ходе приема и обработки пробного сигнала.
Суть решения состоит в том, что для определения времени прохождения сигнала от передатчика к объекту с «сильной» и/или «ординарной» ЭПР и обратно к приемному сенсору, далее времени прохождения, достаточно использовать зондирующие последовательности с меньшим числом оптических импульсов, т.н. пробные сигналы.
Пробный сигнал испускается лидаром перед тем, как производится посылка основного оптического сигнала. После получения вторичной рефлектограммы и определения временных задержек зондирующего пробного сигнала формируется сигнал адаптации стробирования. Прием основного зондирующего сигнала производится уже с адаптацией сигнала стробирования. Испускание и прием пробного и основного сигналов могут осуществляться в одном цикле зондирования.
Так, если длительность пробного сигнала равна  , и задержка в его обработке в реальном времени
, и задержка в его обработке в реальном времени  , время начала испускания основного сигнала должно быть задержано относительно момента начала испускания пробного сигнала не менее, чем на 2 + .
, время начала испускания основного сигнала должно быть задержано относительно момента начала испускания пробного сигнала не менее, чем на 2 + .
Таблица 5. Общие сведения по примерам 4–7

Пример 4
Основные параметры работы стенда в примере 4
Число циклов зондирования K = 5.
Информация о разрешаемых задержках, поступающих на поверхность сенсора ПИМПОИ приведена в таблице 4.
Всего на поверхность сенсора поступает 8 ПИМПОИ из них 5 сильных в которых относительная энергия (нормированная на энергию одного фотона с длинной волны 1550 ) поступающая на поверхность сенсора составляет 20 , одна ПИМПОИ ординарная относительная энергия поступающая на поверхность сенсора составляет 5 и две ПИМПОИ слабые относительная энергия поступающая на поверхность сенсора составляет 1,2 .
ПИМПОИ модулированы последовательностью из примера 2.
Число оптических импульсов в каждой ПИМПОИ -1369
Эквивалентная мощность шумовой составляющей сигнала, детектируемого сенсором - 1,28  .
.
Уставка для контура регулирования нормированной частоты срабатываний сенсора - 0,3
На фиг. 14 (пример 4)
Верхний график
На оси Х отложено время в тактовых импульсах стенда умноженное на 10-4.
На оси Y отложено значение вспомогательной функции помноженное на 5, где 5 — это число циклов накопления в первичной рефлектограмме.
Нижний график
На оси Х отложено время в тактовых импульсах стенда, умноженное на 10-4.
На оси Y значения принимаемые вторичной рефлектограммой Z, полученной после обработки первичной накопленной рефлектограммы.
16A – пики откликов на вторичной рефлектограмме от последовательностей «сильных» оптических импульсов,
16B – пик откликов на вторичной рефлектограмме от последовательности «ординарных» оптических импульсов.
16C - пики откликов на вторичной рефлектограмме от последовательностей «слабых» оптических импульсов.
В результате накопления пяти первичных рефлекторам и обработки накопленной рефлектограммы получена вторичная рефлектограмма, фрагмент которой приведен на фиг. 14 (нижний график).
На рефлектограмме хорошо видны положительные пики откликов от слабых и ординарной ПИМПОИ с различными задержками и отрицательные пики откликов, полученные в качестве эффекта от адаптивного стробирования, от сильных ПИМПОИ.
Для оценки влияния стробирования на потери энергии сигнала вычисляется вспомогательная последовательность  , суть которой – значение числа отсчетов первичной рефлектограммы, вносящих вклад в формирование отсчета вторичной рефлектограммы
, суть которой – значение числа отсчетов первичной рефлектограммы, вносящих вклад в формирование отсчета вторичной рефлектограммы  . Такие отсчеты в первичной рефлектограмме мы определили, ранее в описании, как информационные. Поскольку при получении вторичной рефлектограммы была использована первичная накопленная из 5 рефлектограмм, значения функции были умножены на 5.
. Такие отсчеты в первичной рефлектограмме мы определили, ранее в описании, как информационные. Поскольку при получении вторичной рефлектограммы была использована первичная накопленная из 5 рефлектограмм, значения функции были умножены на 5.
Из верхнего графика видно, что в формировании каждого отчета вторичной рефлектограммы было использовано от 2900 до 3450 информационных отсчетов из первичных рефлектограмм, что связано со стробированием сенсора. При условии отсутствия стробирования значения 5 были бы константой равной 1369*5 = 6845. Таким образом, за счет стробирования попадает в интервалы стробирования от 42 до 50% оптических импульсов в ПИМПОИ.
Результаты по примеру 4 приведены в таблице 6
Пример 5
Пример 5 отличается от примера 4 тем, что в нем было отключено адаптивное стробирование.
На фиг. 15 (пример 5)
Верхний график
На оси Х отложено время в тактовых импульсах стенда умноженное на 10-4.
На оси Y отложено значение вспомогательной функции помноженное на 5, где 5 — это число циклов накопления в первичной рефлектограмме.
Нижний график
На оси Х отложено время в тактовых импульсах стенда, умноженное на 10-4.
На оси Y значения принимаемые вторичной рефлектограммой , полученной после обработки первичной накопленной рефлектограммы.
17A – пики откликов на вторичной рефлектограмме от последовательностей «сильных» оптических импульсов
17B – пик откликов на вторичной рефлектограмме от последовательности ординарных оптических импульсов.
Как видно из примера при выключении функции адаптации стробирования определить задержки слабых ПИМПОИ не представляется возможным.
Результаты по примеру 5 приведены в таблице 6
Пример 6
Пример 6 отличается от примера 4 только тем, что эквивалентная мощность шумовой составляющей сигнала детектируемого сенсором увеличена до 3,2 и увеличена относительная энергия импульсов (нормированная на энергию одного фотона с длинной волны 1550 nm) в слабых ПИМПОИ до 2.
Результаты по примеру 6 приведены в таблице 6
Пример 7
Пример 7 отличается от примера 6 только тем, что отключено адаптивное стробирование и установлено напряжение смещения, обеспечивающее максимальную квантовую эффективность сенсора равную ≈25%.
Результаты по примеру 7 приведены в таблице 6
В таблице 6 ниже приведены сводные данные по примерам 4–7.
Жирным шрифтом с подчеркиванием выделены ячейки с негативным результатом (нет разрешения на вторичной рефлектограмме) – отклик не выделяется над фоновым уровнем рефлектограмы.
Таблица 6. Сводные данные по примерам
 *** для «ординарных»**** для «ординарных» для «слабых» для «слабых»
*** для «ординарных»**** для «ординарных» для «слабых» для «слабых»
* количество имитируемых разрешаемых объектов – количество задержанных относительно времени начала испускания зондирующей оптической последовательности ПИМПОИ с одинаковой энергией в каждом оптическом импульсе.
** среднее число фотонов в оптическом импульсе - средняя энергия оптического импульса в ПИМПОИ, нормированная на энергию одного кванта оптического излучения с частотой 1550 nm.
*** – определяется, как отношение энергии одного оптического импульса ПИМПОИ, попадающего на поверхность сенсора на интервалах стробирования к сумме энергии шумового излучения поступающего на поверхность сенсора на интервалах стробирования и энергии эквивалентного шумового излучения, характеризующей проявление собственного шума сенсора на интервалах стробирования, но без учета эквивалентного шумового излучения вызванного эффектом APP .
– определяется, как отношение энергии одного оптического импульса ПИМПОИ, попадающего на поверхность сенсора на интервалах стробирования к сумме энергии шумового излучения поступающего на поверхность сенсора на интервалах стробирования и энергии эквивалентного шумового излучения, характеризующей проявление собственного шума сенсора на интервалах стробирования, но без учета эквивалентного шумового излучения вызванного эффектом APP .
**** - по вторичной рефлектограмме определяется, как минимальное отношение амплитуд пиков соответствующих откликов («ординарных» или «слабых») к максимальной амплитуде боковых лепестков рефлектограммы по выборке из 10 однотипных рефлектограмм, на фиг. 14 и 15 приведены одни из этих рефлектограмм.
- по вторичной рефлектограмме определяется, как минимальное отношение амплитуд пиков соответствующих откликов («ординарных» или «слабых») к максимальной амплитуде боковых лепестков рефлектограммы по выборке из 10 однотипных рефлектограмм, на фиг. 14 и 15 приведены одни из этих рефлектограмм.
 – измеренная на интервале приема оптического сигнала нормированная на частоту стробирования средняя частота срабатываний сенсора, установившаяся при регулировании ее по уставке
– измеренная на интервале приема оптического сигнала нормированная на частоту стробирования средняя частота срабатываний сенсора, установившаяся при регулировании ее по уставке  (примеры 3,4,5) или при фиксированной квантовой эффективности сенсора
(примеры 3,4,5) или при фиксированной квантовой эффективности сенсора  (пример 7).
(пример 7).
ξ – средняя квантовая эффективность сенсора на интервалах стробирования установившаяся в результате регулирования (примеры 3,4,5) по уставке или заданная уставкой (пример 7).
Промышленная применимость.
Предлагаемое устройство для приема оптического сигнала позволяет использовать в качестве источников импульсного излучения относительно недорогие, малой мощности, устройства.
Дополнительные преимущества:
1) помехозащищенность,
2) разрешающая способность по дальности – от 3–5 cm.
3) возможность разрешения всех объектов в створе луча за один цикл зондирования.
4) возможность контроля потерь в соотношении 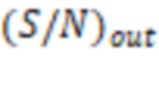 . за счет стробирования и наличия в принимаемом сигнале сильных импульсных помех или «сильных» ПИМПОИ, затрудняющих обработку принимаемого сигнала, путем вычисления вспомогательной функции Y.
. за счет стробирования и наличия в принимаемом сигнале сильных импульсных помех или «сильных» ПИМПОИ, затрудняющих обработку принимаемого сигнала, путем вычисления вспомогательной функции Y.
Дополнительный технический результат состоит в том, что адаптация стробирования увеличивает для пиков откликов на рефлектограмме «слабых» сигналов и регулирование средней частоты срабатываний сенсора позволяет установить оптимальную квантовую эффективностью сенсора при которой достигается максимальное соотношение .
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЙ ДО ОБЪЕКТА | 2017 |
|
RU2653558C9 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЙ ДО ОБЪЕКТА | 2016 |
|
RU2626973C1 |
| СПОСОБ И ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЙ ДО ОБЪЕКТА | 2015 |
|
RU2605628C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЙ ДО ОБЪЕКТА | 2014 |
|
RU2577079C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАЛИЧИЯ ДЕФЕКТОВ ПРОВОДОВ И КАБЕЛЕЙ В СЕГМЕНТАХ СЕТЕЙ С РАЗВЕТВЛЕННОЙ ТОПОЛОГИЕЙ | 2006 |
|
RU2319972C1 |
| СПОСОБ ОЦЕНКИ ВИБРАЦИОННЫХ ИЛИ АКУСТИЧЕСКИХ СИГНАЛОВ ВДОЛЬ ПРОТЯЖЕННЫХ ОБЪЕКТОВ НА БАЗЕ ВОЛОКОННО-ОПТИЧЕСКОГО КОГЕРЕНТНОГО РЕФЛЕКТОМЕТРА С АМПЛИТУДНОЙ И ФАЗОВОЙ МОДУЛЯЦИЕЙ ЗОНДИРУЮЩЕГО ИЗЛУЧЕНИЯ | 2016 |
|
RU2624594C1 |
| Устройство для мониторинга виброакустической характеристики скважин | 2022 |
|
RU2794712C1 |
| РАСПРЕДЕЛЕННЫЙ ДАТЧИК АКУСТИЧЕСКИХ И ВИБРАЦИОННЫХ ВОЗДЕЙСТВИЙ | 2014 |
|
RU2562689C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ (ВАРИАНТЫ) | 2002 |
|
RU2239205C2 |
| Способ обработки радиолокационных сигналов в импульсно-доплеровской радиолокационной станции с активной фазированной антенной решеткой | 2021 |
|
RU2760409C1 |
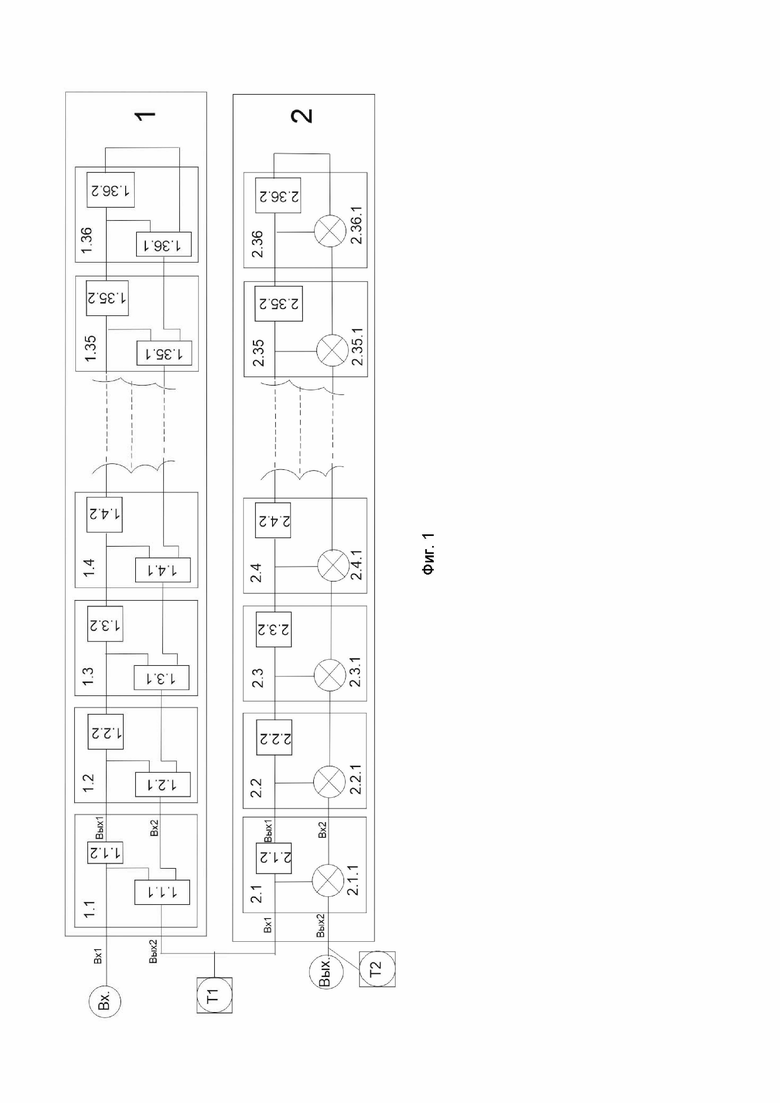
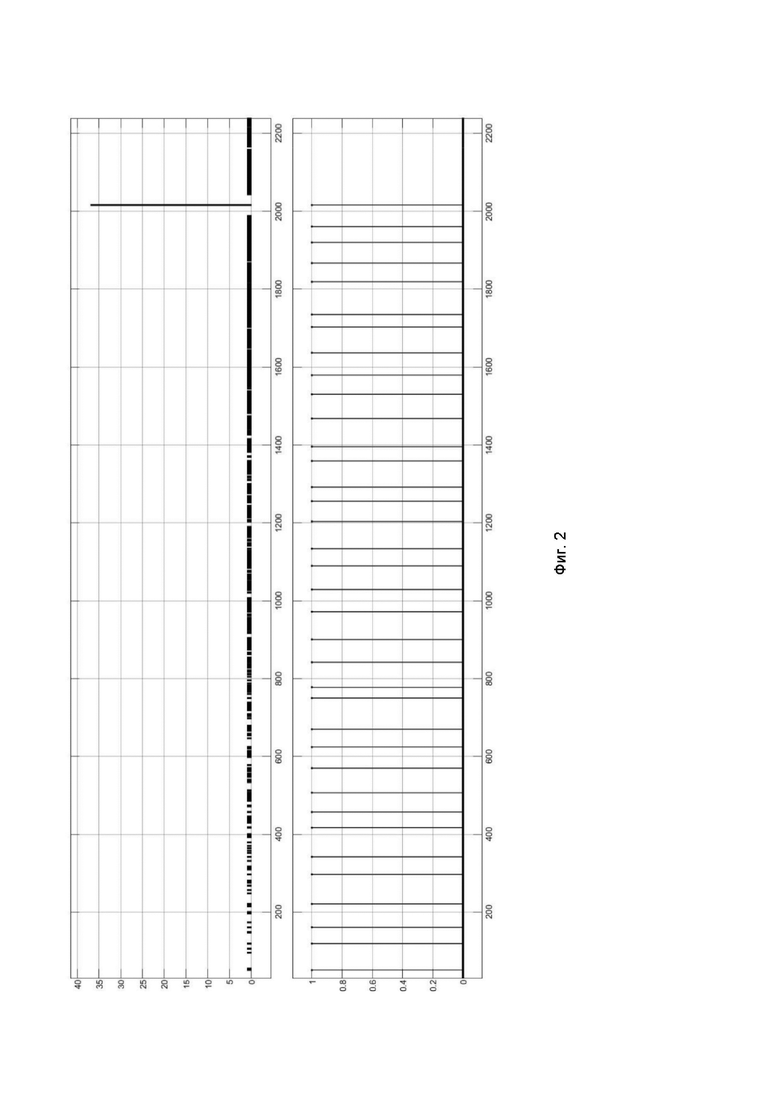
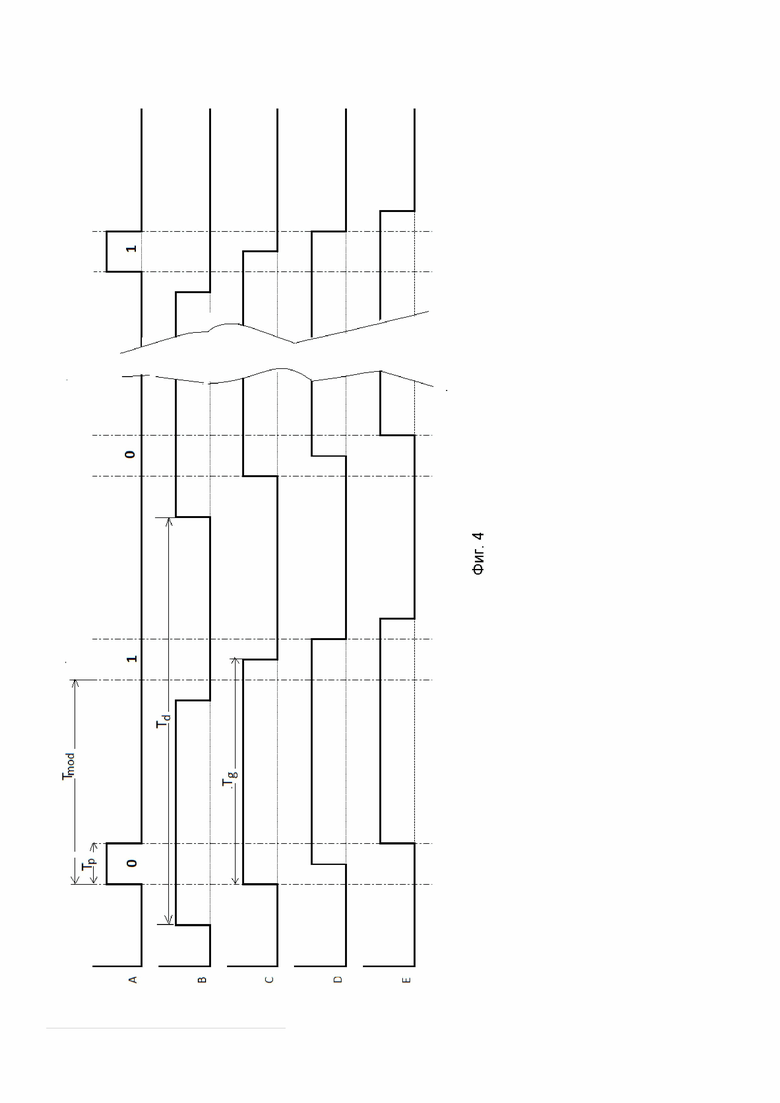
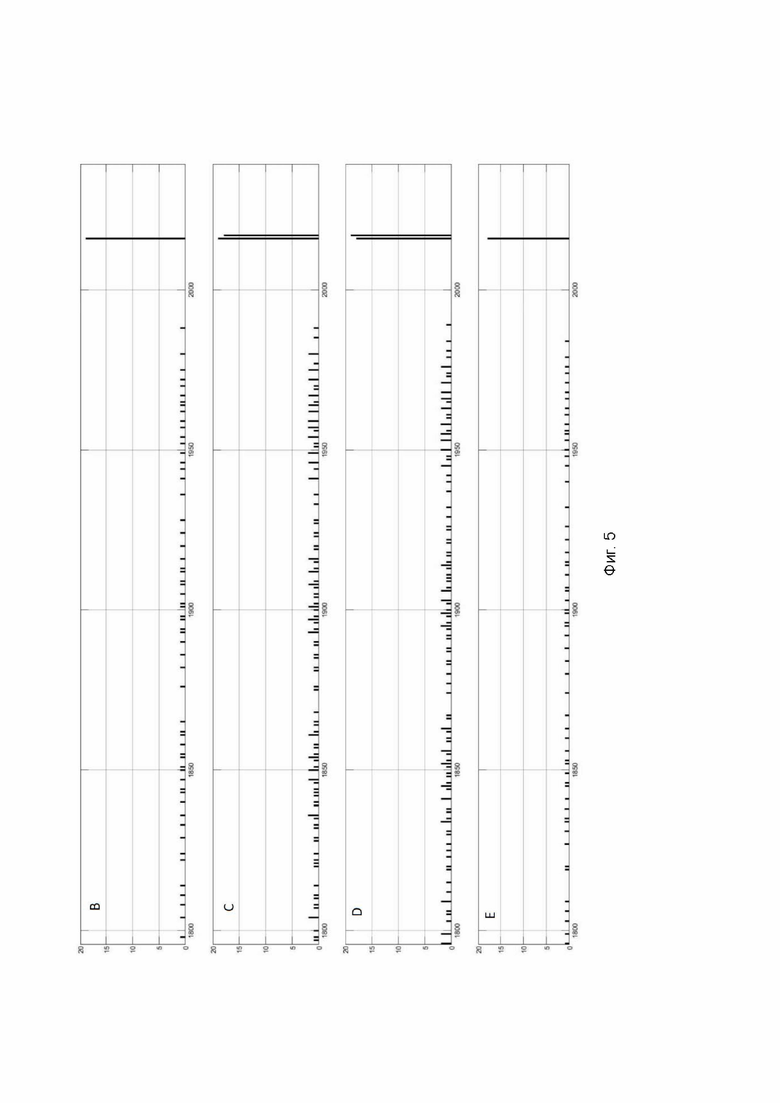
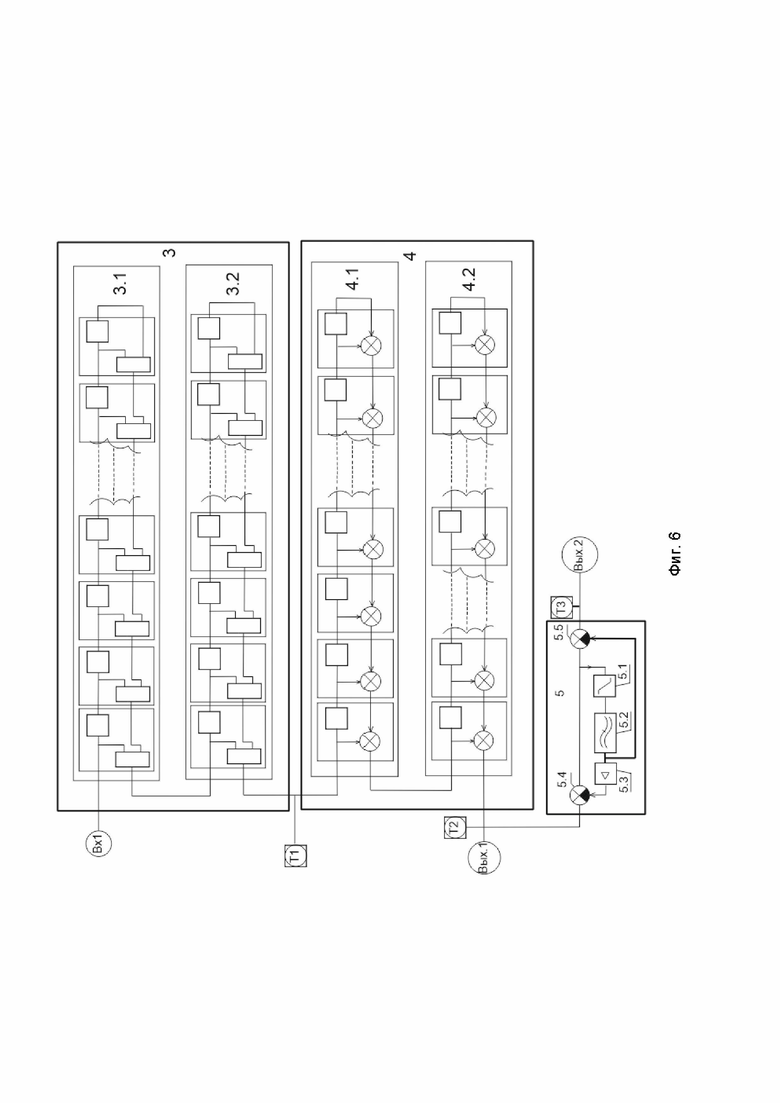
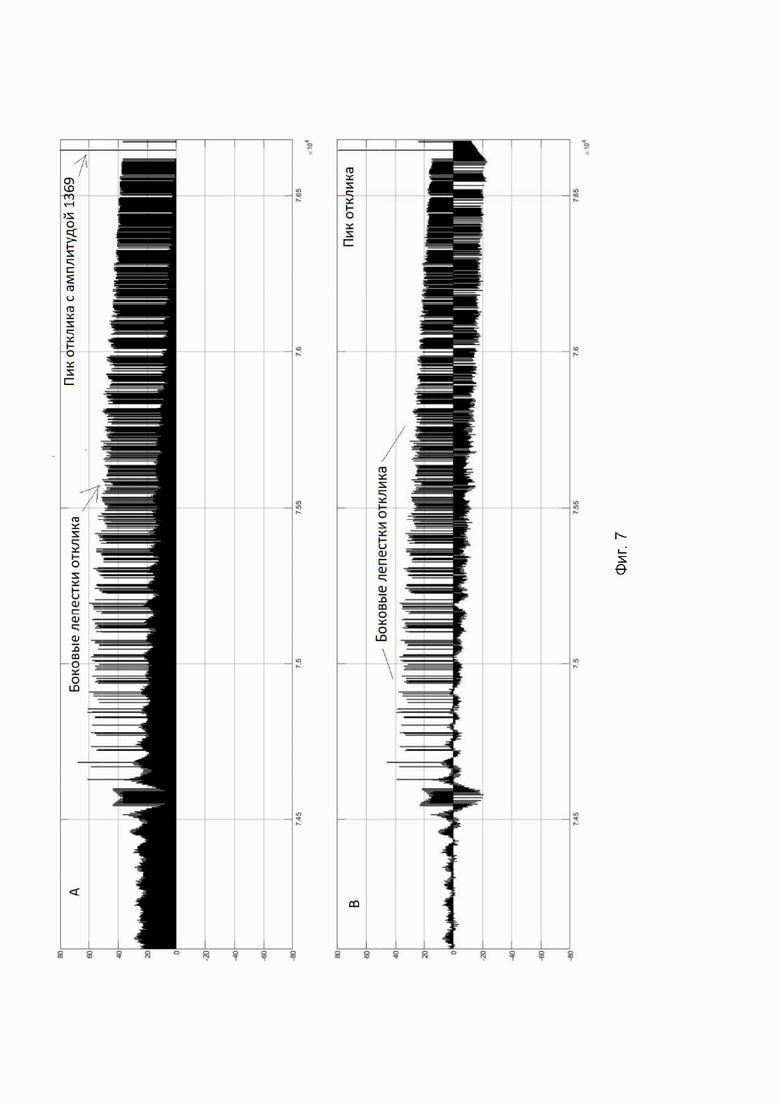
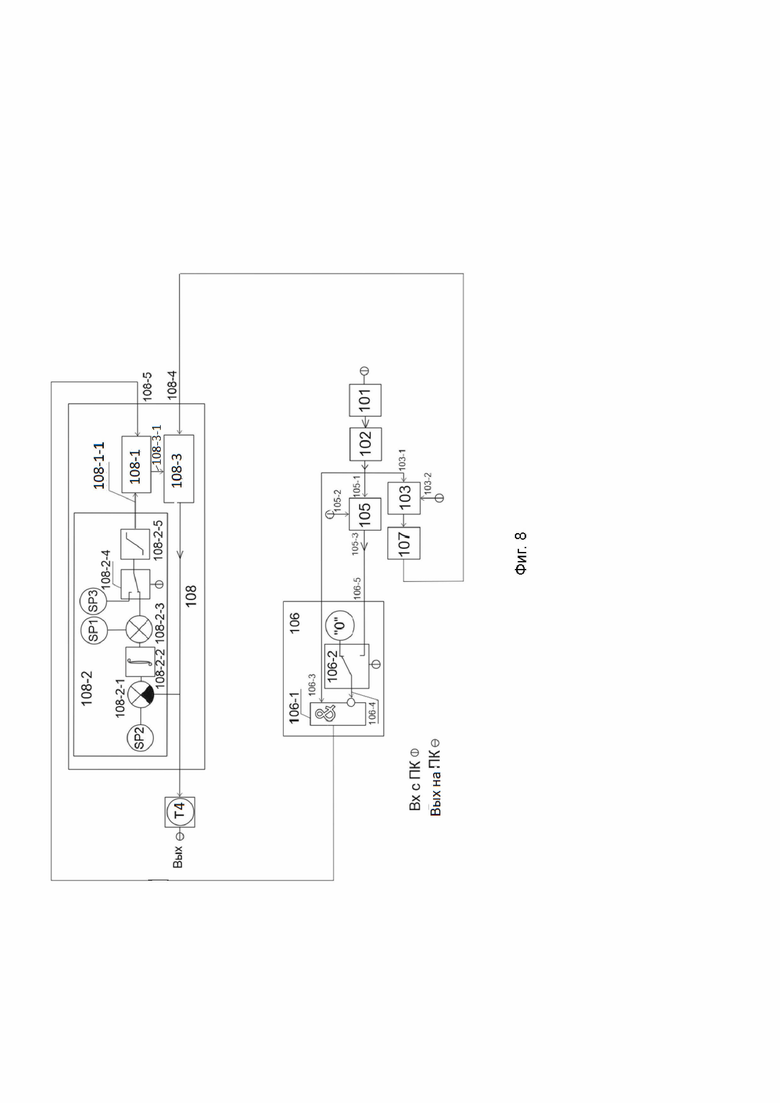
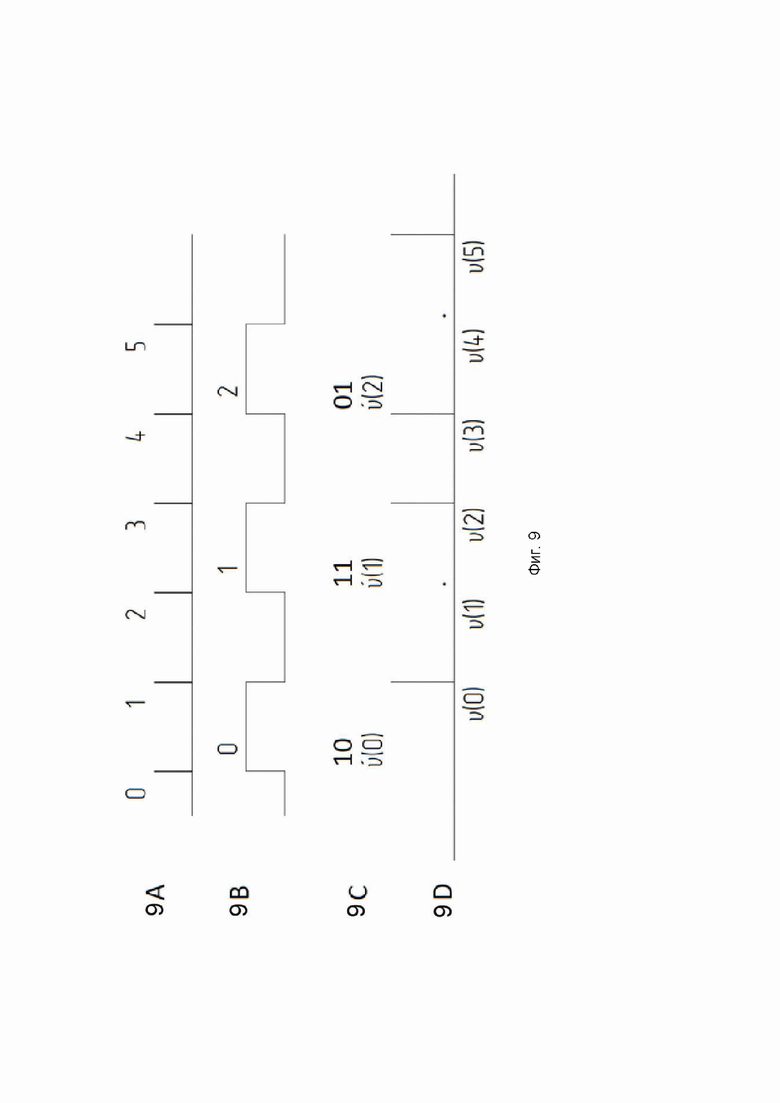
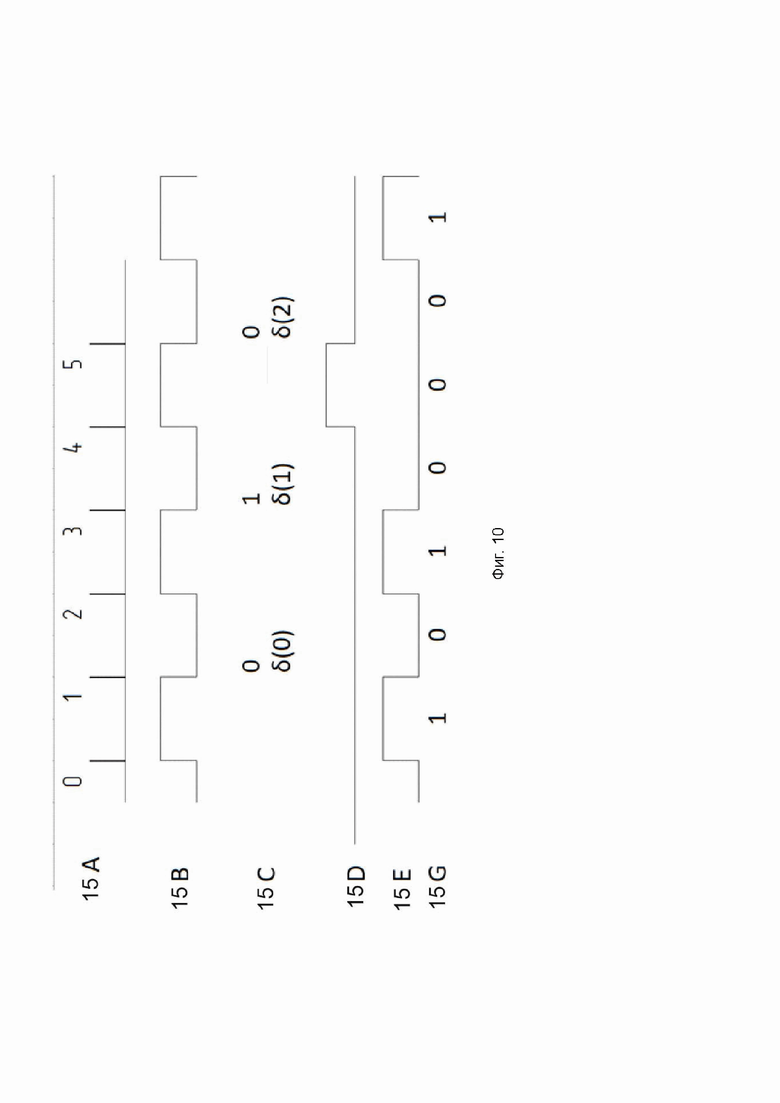
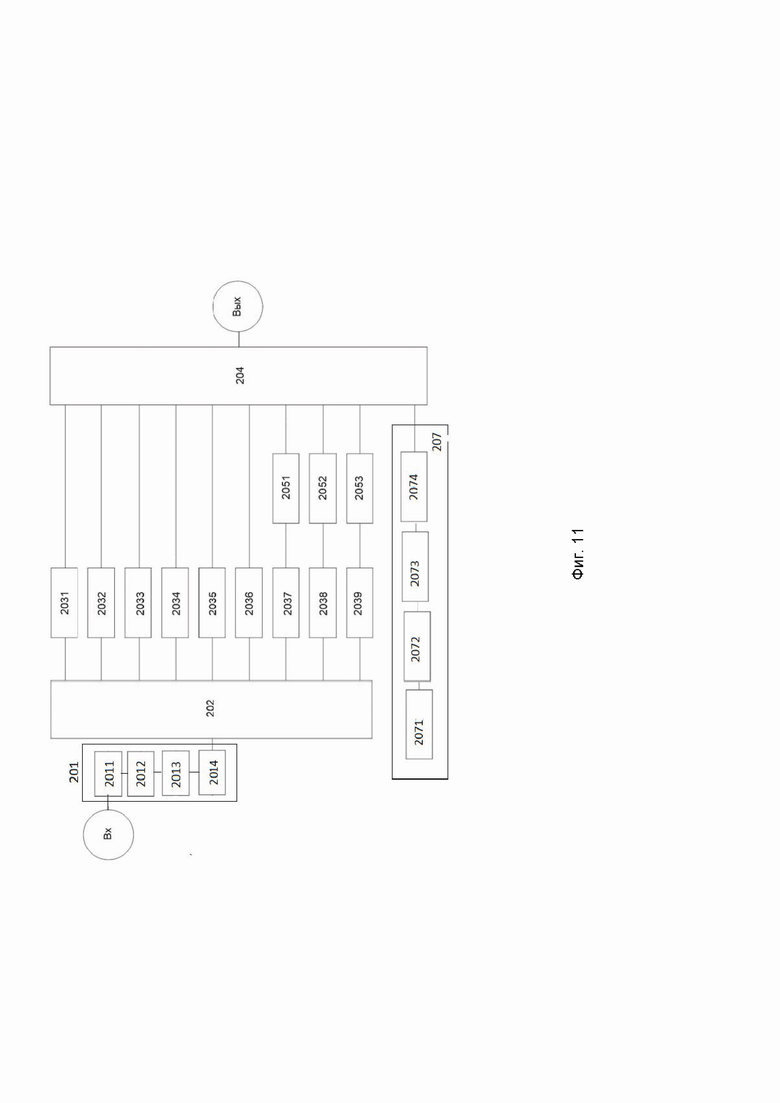
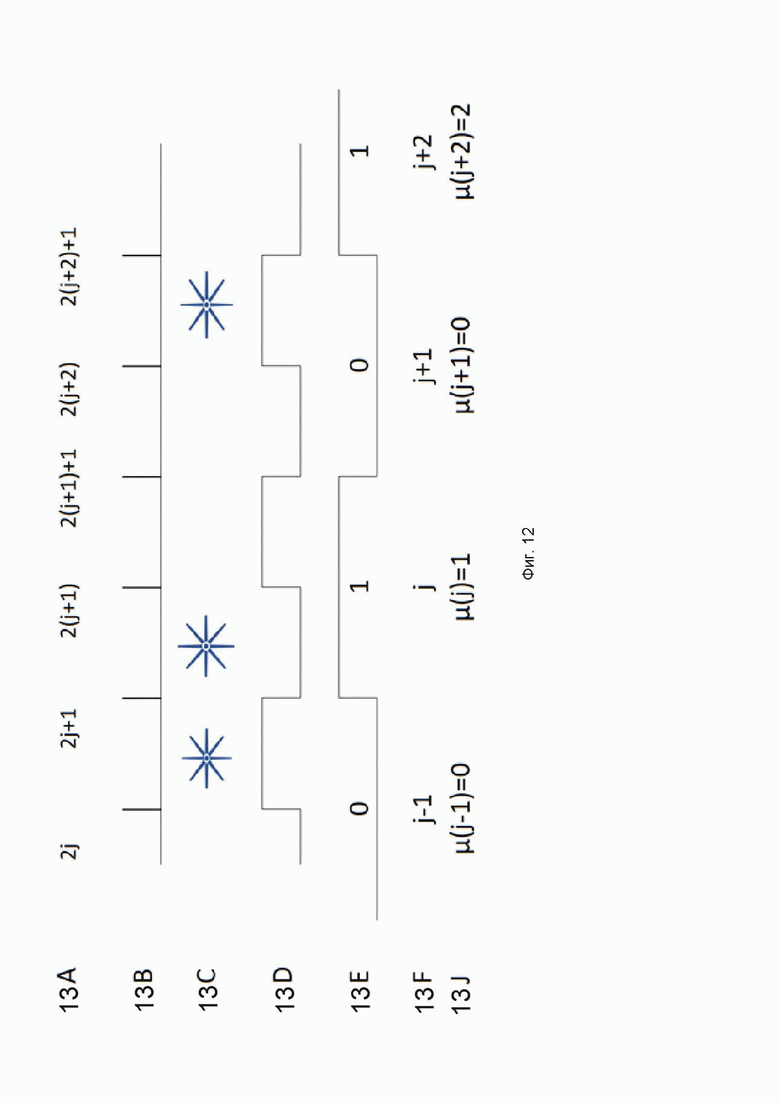
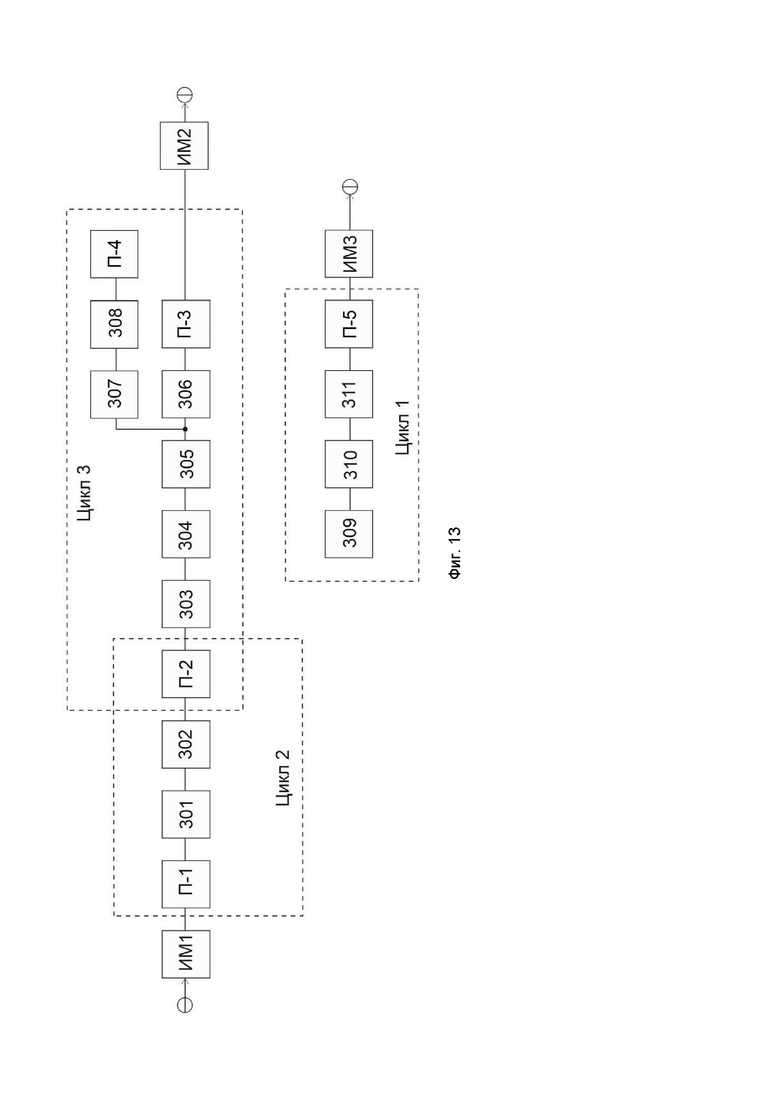
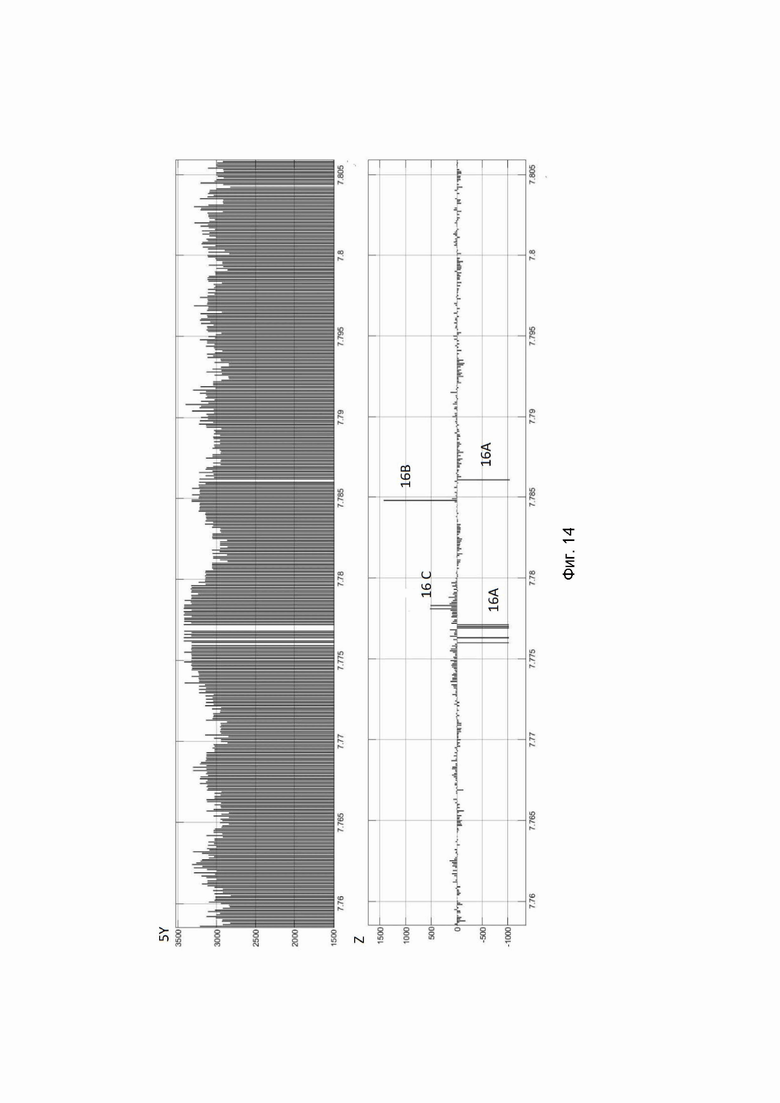
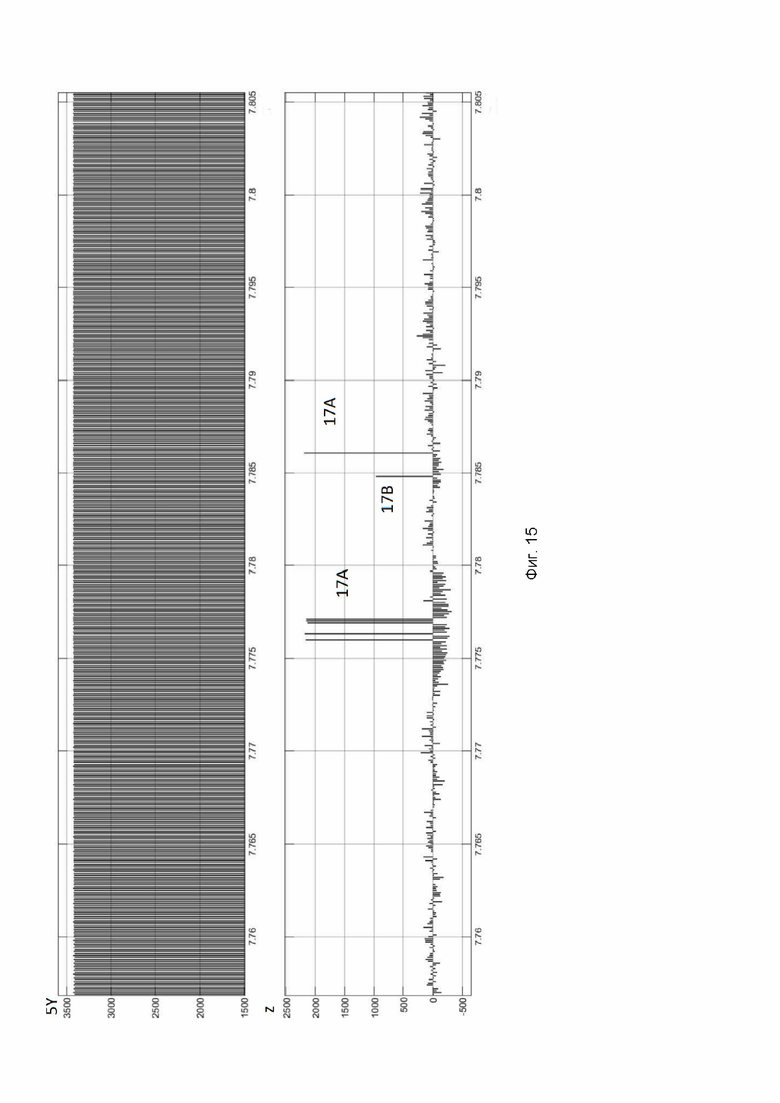
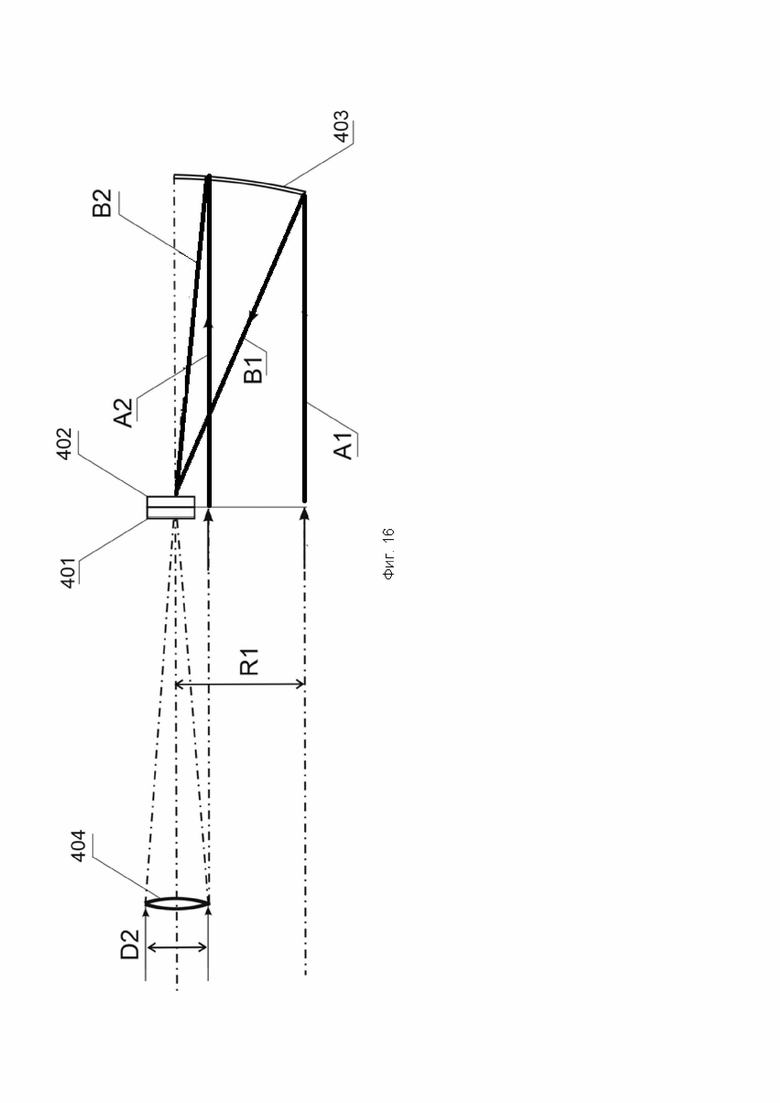
Изобретение относится к технике связи и может использоваться в системах оптической связи. Технический результат состоит в повышении селективности разрешения зондируемых объектов при ограниченной мощности зондирующего сигнала и/или длительности зондирующего сигнала. Для этого в устройствах связи используют псевдошумовые оптические сигналы. Оптическое приемное устройство работает в нелинейном режиме и позволяет создавать сканеры (лидары) для дистанционного обнаружения металлических предметов в людской толпе, в зарослях, дистанционно обнаруживать и определять концентрации газов в воздухе, создавать лидары, работающие в условиях ограниченной для человеческого глаза видимости и включает узел регулировки квантовой эффективности по частоте срабатываний сенсора и блок формирования сигнала адаптации стробирования. 1 з.п. ф-лы, 16 ил., 6 табл.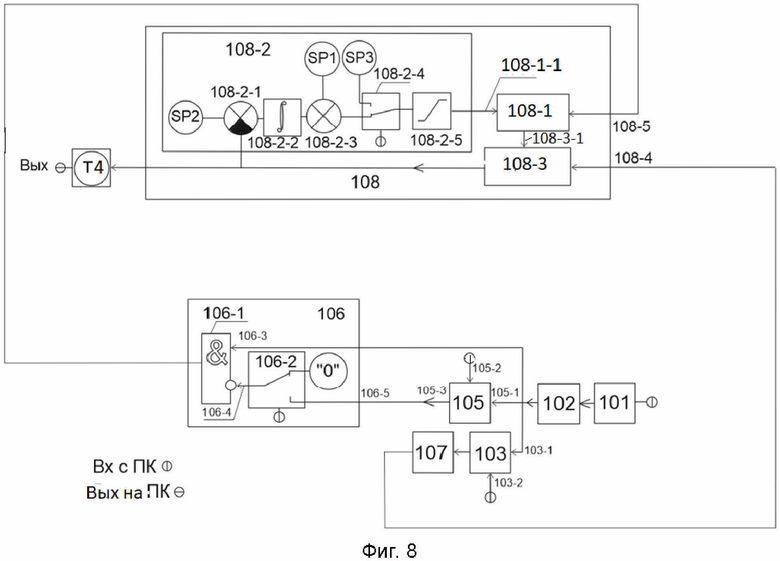
1. Способ приема оптического сигнала, при котором формируют тактовый сигнал, принимают отраженный от зондируемого объекта сигнал сенсором оптического детектора, работающего в нелинейном режиме, имеющим блок согласованной фильтрации и модуль порогового обнаружения сигнала, отличающийся тем, что адаптируют стробирующий сигнал и регулируют квантовую эффективность по частоте срабатываний сенсора.
2. Способ по п.1, отличающийся тем, что адаптацию стробирующего сигнала осуществляют путем формирования сигнала адаптации стробирования в процессе зондирования по результатам согласованной фильтрации фрагмента отраженного зондирующего сигнала в виде ПИМ-последовательности или отдельного зондирующего пилот-сигнала, позволяющего оценить временные задержки отраженного зондирующего сигнала от элементов зондируемого объекта с сигналами, при которых одиночные оптические импульсы, поступающие на поверхность сенсора оптического детектора, приводят к его срабатыванию с вероятностью, близкой к единице.
| US 8072582 B2, 06.12.2011 | |||
| ЛИДАР БЕЗ ПОДВИЖНЫХ ЧАСТЕЙ | 2017 |
|
RU2690990C2 |
| ФАЗИРОВАННЫЙ ЛИДАР | 2018 |
|
RU2690537C1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| СВЕРХПРОВОДНИКОВЫЙ ФОТОННЫЙ ДЕТЕКТОР ВИДИМОГО И ИНФРАКРАСНОГО ДИАПАЗОНОВ ИЗЛУЧЕНИЯ, РАЗЛИЧАЮЩИЙ ЧИСЛО ФОТОНОВ | 2007 |
|
RU2346357C1 |

