Область техники, к которой относится изобретение
Изобретение относится к способу основанной на модели диагностики мехатронной системы, к диагностической системе и машиночитаемому носителю.
Уровень техники
Диагностика систем на наличие неисправностей при обращении со сложными мехатронными системами требует применения способов диагностики, основанных на модели. В зависимости от того, рассчитывается ли основанная на модели функция диагностики или основанный на модели алгоритм диагностики во встроенном, или бортовом (онлайновом) исполнении, т.е. внутри системы, или же в стендовом, или внешнем (офлайновом) исполнении, т.е. вне системы, различают две основные концепции диагностики: с одной стороны, встроенную диагностику неисправностей, с другой стороны, стендовую диагностику неисправностей.
Однозначная диагностика неисправностей, в основе которой лежит полное информационное содержание временной характеристики неисправной системы, в принципе может обеспечиваться только классической встроенной диагностикой неисправностей. Однако в случае сложных мехатронных систем из-за строгих требований к диагностированию в режиме реального времени при одновременно ограниченных вычислительных возможностях существующих устройств управления такая диагностика не поддается реализации.
При этом стендовая диагностика неисправностей представляет собой компромисс, который, хотя и обеспечивает реализацию средствами вычислительной техники даже сложных алгоритмов диагностики, но работает в принципе лишь с неполным информационным содержанием временной характеристики неисправной системы. Поэтому достижимое качество стендовой диагностики обычно ниже, чем при встроенной диагностике неисправностей. Спорадически возникающие неисправности, как, например, периодические прерывания электрического контакта штепсельных разъемов дождевой водой, примерзание механических подвижных элементов, перегрев вследствие непредусмотренной нагрузки на систему и т.д., невозможно диагностировать с высокой надежностью, кроме того, стендовая диагностика дает однозначные результаты лишь при определенных неисправностях.
В публикации DE 10333171 А1 приведено описание основанного на модели способа диагностики для контроля подсистемы машины. При этом используется количественная модель подсистемы и выполняется пособытийный анализ изменений выходных сигналов посредством качественных значений.
Раскрытие изобретения
Исходя из вышеизложенного, в изобретении предложены способ, охарактеризованный признаками пункта 1, диагностическая система, охарактеризованная признаками пункта 8, и машиночитаемый носитель данных, охарактеризованный признаками пункта 9 формулы изобретения.
Предлагаемый в изобретении способ основанной на модели диагностики мехатронной системы предусматривает обнаружение неисправностей, выполняемое устройством управления внутри мехатронной системы, и идентификацию неисправностей, выполняемую вычислительным устройством вне мехатронной системы.
Другие предпочтительные варианты реализации способа описаны в зависимых пунктах формулы изобретения.
Предлагаемая в изобретении диагностическая система для основанной на модели диагностики мехатронной системы содержит устройство управления, расположенное внутри мехатронной системы, и вычислительное устройство, расположенное вне мехатронной системы. При этом устройство управления выполнено с возможностью обнаружения неисправностей, возникающих в мехатронной системе, а вычислительное устройство - с возможностью идентификации обнаруженных неисправностей.
Таким образом, создается новая концепция диагностики, так называемой комбинированной встроенно-стендовой диагностики, сочетающая в себе преимущества встроенной и стендовой диагностики. Эта концепция позволяет выполнять диагностику, в основе которой лежит полное информационное содержание результатов встроенной диагностики и которая средствами вычислительной техники реализует диагностику неисправностей сложных мехатронных систем.
Задача диагностики разделяется на не требующую большого объема вычислений подзадачу обнаружения неисправностей и на требующую большого объема вычислений подзадачу идентификации неисправностей. При обнаружении неисправностей устройство управления внутри мехатронной системы определяет, имеет ли место неисправность в определенный момент времени tF. При идентификации неисправностей высокоэффективное внешнее вычислительное устройство, например диагностический тестер, посредством диагностической функции позволяет однозначно идентифицировать обнаруженную неисправность.
Один из аспектов изобретения состоит в том, что оно позволяет записывать определенную последовательность временно зафиксированных в памяти данных для входных и выходных параметров, а также временные интервалы по принципу кольцевой записи. Управляемая по обнаружению неисправностей передача данных между временной и постоянной памятью обеспечивает интеллектуальный выбор информативных данных. Таким образом, в основе диагностики лежит достаточная информация при одновременно ограниченном объеме хранящихся в памяти данных.
Путем разделения задач диагностики можно использовать преимущества как встроенной, так и стендовой диагностики.
Следовательно, встроенное обнаружение неисправностей может осуществляться в реальных рабочих состояниях с учетом спорадических неисправностей, которые невозможно воспроизвести, например, в условиях мастерской. Кроме того, можно наблюдать динамику развития неисправности во времени, что дает дополнительную информацию об этой неисправности.
Для стендовой идентификации неисправностей используется находящееся вне мехатронной системы вычислительное устройство достаточной производительности и с достаточной емкостью памяти. При идентификации неисправностей к функции диагностики не предъявляются осуществления процесса в реальном времени. Функцию диагностики можно просто актуализировать путем обновлений во внешнем вычислительном устройстве, поэтому перепрограммирование устройства управления не требуется.
Предлагаемый в изобретении носитель данных предназначен для непосредственного применения в компьютере, в частности в рассмотренной выше диагностической системе, и содержит записанную на нем компьютерную программу со средствами программного кода, при выполнении которой на компьютере или в соответствующем процессоре выполняются операции рассмотренного выше способа.
Другие преимущества изобретения и возможности его осуществления поясняются в описании и на прилагаемых чертежах.
Разумеется, перечисленные выше и поясняемые ниже признаки можно использовать в рамках осуществления настоящего изобретения не только в соответствующей комбинации, но и в других комбинациях или по отдельности.
Краткое описание чертежей
Ниже подробно рассмотрен пример осуществления изобретения, поясняемый чертежами, на которых показано:
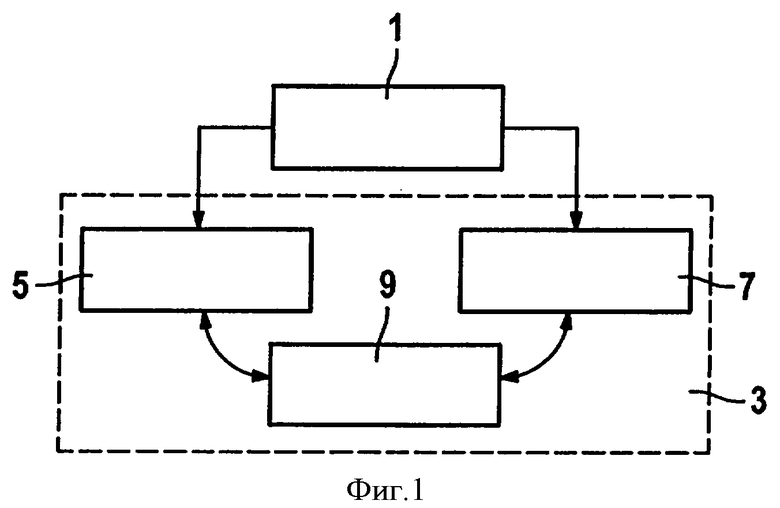
на фиг.1 - диаграмма распределения диагностических задач,
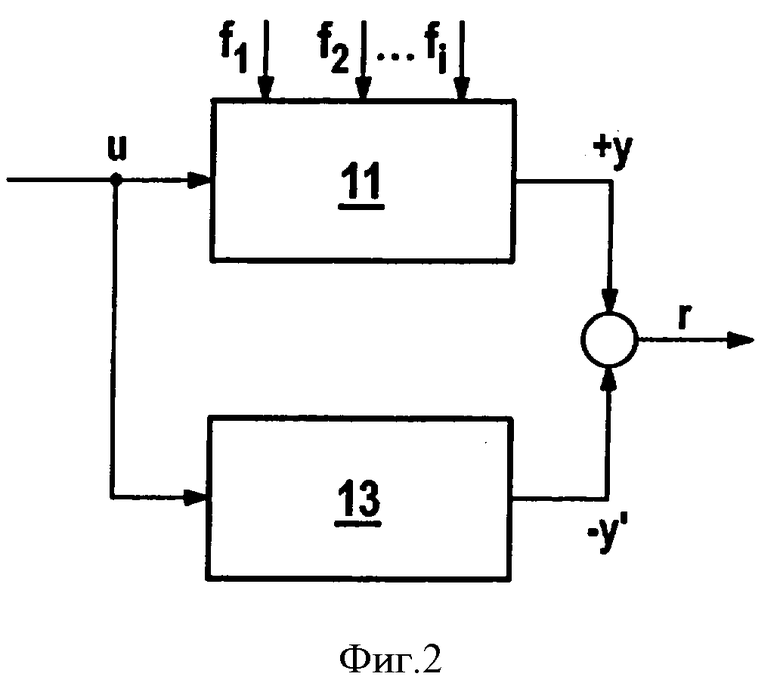
на фиг.2 - диаграмма обнаружения неисправностей,
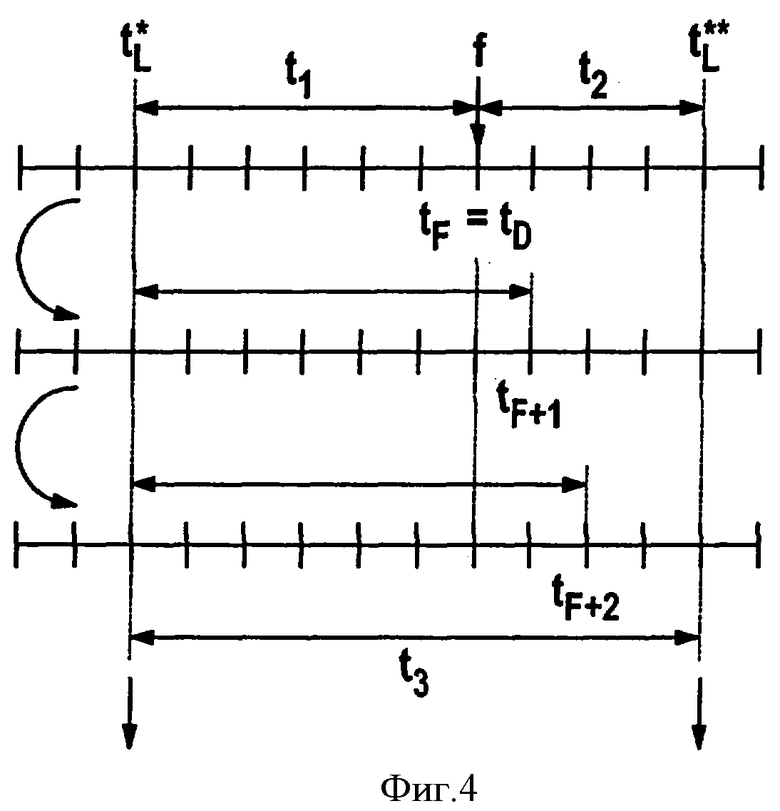
на фиг.3 - диаграмма управляемой по обнаружению неисправностей записи в память входных и выходных сигналов,
на фиг.4 - временная диаграмма процесса записи данных в память при возникновении неисправности.
Осуществление изобретения
Диаграмма на фиг.1 поясняет, как задача 1 диагностики 3 неисправностей подразделяется на встроенное обнаружение 5 неисправности и стендовую идентификацию 7 неисправности. Данные или сигналы о неисправностях, возникающих в мехатронной системе и выявляемых при обнаружении 5 неисправностей, записываются в управляемую по обнаружению неисправностей память 9, организованную по принципу кольцевой памяти.
На фиг.2 показано, как в рамках обнаружения неисправностей регистрируются неисправности f1, f2, fi, которые могут возникать при работе мехатронной системы 11. При этом задача диагностики сводится к уравнению реальной неисправной системы 11 с используемой для выявления неисправностей моделью 13 исправной системы. Сопоставление поведения системы 11 и модели 13 можно выполнять с помощью измеренных фактических значений у и сгенерированных на модели значений y' выходных параметров, причем значения входных параметров обозначены как u. Остаточные значения, характеризующие отклонение фактических значений от заданных, можно генерировать как на основе модели, так и на основе сигналов. Наличие неисправность f1, f2, fi устанавливают в том случае, если остаточное значение r превышает максимально допустимое пороговое значение rmax обнаружения.
Поскольку при обнаружении неисправностей не нужно проводить различий между неисправностями f1, f2, fi по их действию на систему, требования к способности системы обнаруживать неисправности далеко не столь строги, как к способности идентифицировать неисправности. Если обнаружение неисправностей осуществляется, например, на основе модели, то уже достаточно, если используемая при обнаружении неисправностей модель 13 будет отображать только существенные взаимосвязи между изменениями сигналов на входе и выходе системы 11. Поэтому функцию обнаружения неисправностей можно реализовать на упрощенных моделях 13 с малой степенью детализации.
На фиг.3 представлена управляемая по обнаружению неисправностей запись в память значений и входных сигналов на входах системы 11 и фактических значений у выходных сигналов на выходах системы и соответствующего вектора времени t. В значениях u y сигналов содержится полная информация о временной характеристике неисправной системы 11. Таким образом, эти значения u, y можно записывать в память непосредственно внутри системы 11, а затем анализировать вне системы на внешней аппаратуре (стенде).
Обнаружение неисправностей осуществляется путем сравнения фактических значений y выходных параметров с их заданными значениями y', например сгенерированными моделью. Однако заданное значение не обязательно должно генерироваться на модели. Временная память для записи сигналов, поскольку она выполнена как кольцевая память, всегда активна. Как только внутри системы возникнет и будет обнаружена неисправность, данные u, y за период t1 немедленно передаются в постоянную память. Данные u, y за период t2 передаются в постоянную память в первый возможный момент времени tL**.
Таким образом, сообщение об обнаружении неисправности служит для активизации процесса передачи данных u, y за период t3 из всегда активной временной памяти для записи сигналов (кольцевой памяти) в постоянную память.
Предусмотренные для последующей идентификации неисправностей значения usave, ysave, tsave входных и выходных параметров, а также время сохраняются надолго в управляемой по обнаружению неисправностей постоянной памяти 17.
Поскольку при достаточно частом квантовании сигналов даже носители информации с очень большой емкостью быстро достигают предела своих возможностей, запись в память значений u, y сигналов, получаемых в течение всего периода t работы мехатронной системы 11, не представляется возможной.
В рассматриваемой концепции диагностики, как показывает фиг.4, значимым является только тот отрезок времени t3, который включает в себя момент tF возникновения неисправности. При соответствующем выборе этого отрезка времени t3 он содержит полную информацию о динамике развития соответствующей неисправности f во времени. При правильном синтезе функции обнаружения неисправностей время задержки между моментом tF фактического возникновения неисправности и моментом tD обнаружения этой неисправности пренебрежимо мало, причем tD≈tF, и следовательно, справедливо допущение, что tD=tF. При записи сигналов в память с управлением по обнаружению неисправностей предусмотрено использовать сообщение об обнаружении неисправности к моменту tD как команду управления процессом записи, фиксирующим значения u, y сигналов в значимом отрезке времени t3, включающем в себя момент возникновения неисправности tD.
Для реализации этого подхода изобретение предусматривает, что блок памяти устройства управления, расположенного внутри мехатронной системы, может быть образован в одной своей части временной памятью 15 для записи сигналов, например промежуточной или буферной памятью, работающей по принципу кольцевой памяти, а в другой части - постоянной памятью 17. При такой управляемой по обнаружению неисправностей передаче данных происходит выбор информативных значений u, y сигналов или содержащихся в сигналах данных, приходящихся на отрезок времени t3.
Операция по перезаписи содержимого кольцевой памяти происходит в текущий момент времени t*L с временным сдвигом в прошлое (назад) относительно момента tF. Это гарантирует, что информация, содержащаяся в сигналах u, y за первый предшествующий отрезок времени t1 между моментами t*L и tF и относящаяся к неисправности f, обнаруженной в момент времени tD, не пропадет вследствие переписывания.
Кроме того, в памяти фиксируются значения сигналов и, y за второй отрезок времени t2, следующий за моментом tD и оканчивающийся в момент времени t**L. Сообщение об обнаружении неисправности инициирует перезапись временно записанных в память значений или данных сигналов и, y за информативный отрезок времени t3, включающий в себя оба первых жестко заданных отрезка времени t1 и t2 между моментами времени t*L и t**L, из временной памяти 15 в постоянную память 17 для длительного хранения в постоянной памяти.
Записанные в постоянную память 17 в рамках обнаружения неисправностей данные по отдельным подтвержденным неисправностям f1, f2, fi можно теперь считать через диагностический интерфейс, что позволит в дальнейшем производить идентификацию неисправностей вне системы. Соответствующие друг другу изменения сигналов u и y во времени, а также зафиксированный вектор времени t в сочетании с моделью поведения неисправной системы дают все необходимое для полного решения диагностической задачи.
Настоящая концепция диагностики рассчитана на диагностику неисправностей сложных мехатронных систем, эксплуатируемых в большом количестве экземпляров. По экономическим соображениям такие системы работают в большинстве случаев с устройствами управления, обладающими сравнительно низкой производительностью. Поскольку основанная на модели диагностика неисправностей в настоящее время не относится к классической функциональности устройств управления, для диагностики неисправностей обычно выделяется лишь незначительная часть имеющейся вычислительной мощности и емкости памяти.
К потенциальным возможностям применения концепции диагностики является диагностика неисправностей легковых/грузовых автомобилей, а также двигателей внутреннего сгорания к ним (например, применение в системах впуска воздуха, системах впрыскивания топлива и т.д.), мехатронных систем ходовой части (например, антиблокировочных устройств, электронных систем стабилизации, электрогидравлических тормозных систем и т.д.), мехатронных промышленных установок и средств автоматизации, а также упаковочной техники или теплотехнического оборудования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство и способ гибридного сканирования радиоэлектронной аппаратуры | 2020 |
|
RU2781091C2 |
| ОСНОВАННАЯ НА МОДЕЛИ СИСТЕМА ОБНАРУЖЕНИЯ НЕИСПРАВНОСТЕЙ ДЛЯ ЭЛЕКТРОДВИГАТЕЛЕЙ | 1997 |
|
RU2155328C1 |
| Процессор цифровой вычислительной системы | 1971 |
|
SU475897A1 |
| Устройство диагностирования технического состояния элементов газовоздушного тракта дизеля | 1984 |
|
SU1359699A1 |
| СПОСОБ И СИСТЕМА ДИНАМИЧЕСКОЙ ЧАСТОТНОЙ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ УПРАВЛЕНИЯ | 2016 |
|
RU2620632C1 |
| СПОСОБ ОБРАБОТКИ ЗАПРОСА НА СТИРАНИЕ КОДА НЕИСПРАВНОСТИ, ХРАНЯЩЕГОСЯ В ПАМЯТИ ВЫЧИСЛИТЕЛЬНОГО УСТРОЙСТВА, УСТАНОВЛЕННОГО НА БОРТУ АВТОМОБИЛЬНОГО ТРАНСПОРТНОГО СРЕДСТВА, И СПОСОБ И СИСТЕМА СОДЕЙСТВИЯ ТЕХНИЧЕСКОМУ ОБСЛУЖИВАНИЮ ТАКОГО ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2458379C2 |
| Прибор встроенного автоматического диагностирования автомобилей и тракторов | 2021 |
|
RU2825499C2 |
| Способ автоматизированного контроля работоспособности и диагностики неисправностей радиоэлектронной аппаратуры | 2022 |
|
RU2797535C1 |
| СПОСОБ ФОРМИРОВАНИЯ ОТКАЗОУСТОЙЧИВОЙ ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ И ОТКАЗОУСТОЙЧИВАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2010 |
|
RU2439674C1 |
| ВСТРОЕННЫЙ РЕГУЛЯТОР ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА, ОБЛАДАЮЩИЙ ВОЗМОЖНОСТЬЮ УПРАВЛЕНИЯ КОНТУРОМ И КЛАПАНОМ | 2016 |
|
RU2714821C2 |
Изобретение относится к диагностике мехатронной системы. Изобретение позволяет проводить диагностику сложной мехатронной системы в условиях эксплуатации при ограниченных вычислительных возможностях установленного на ней диагностического устройства управления. Способ основанной на модели диагностики мехатронной системы предусматривает обнаружение (5) неисправностей, выполняемое устройством управления внутри мехатронной системы, и идентификацию (7) неисправностей, выполняемую вычислительным устройством вне мехатронной системы. При обнаружении (5) неисправностей фактические значения (y) для выходных сигналов на выходах системы, а также вектор времени (t) записывают в память с управлением по обнаружению неисправностей. Из фактического значения (y) выходного сигнала вычитают заданное значение (y') выходного параметра. При этом наличие неисправности устанавливают в том случае, если остаточное значение (г) превышает максимально допустимое пороговое значение (rmax) обнаружения. 2 н. и 4 з.п. ф-лы, 4 ил.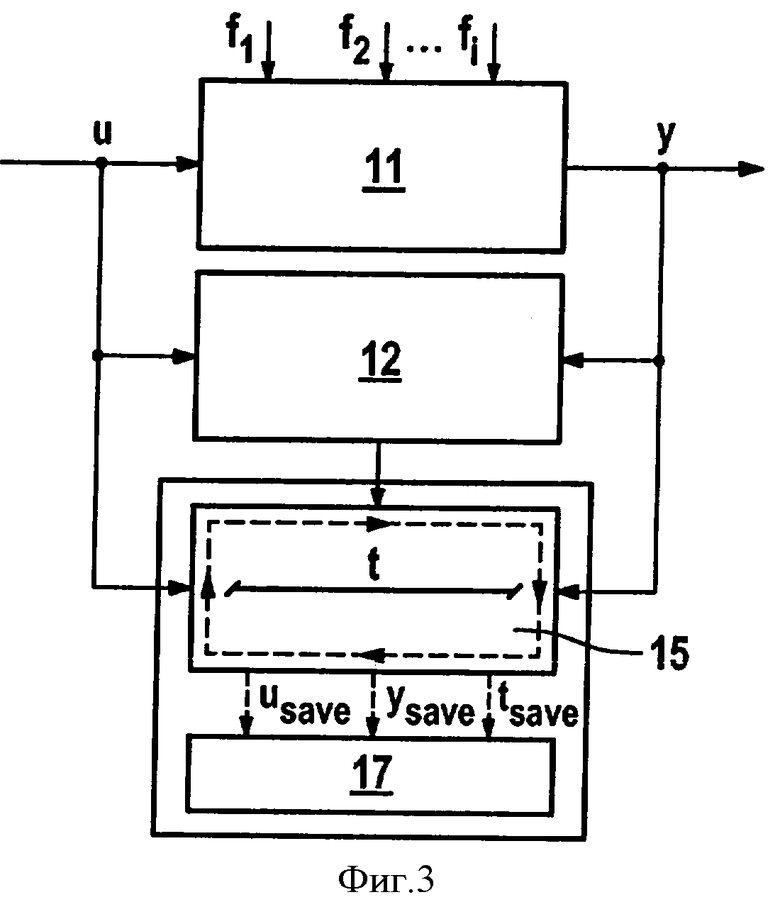
1. Способ основанной на модели диагностики мехатронной системы (11), предусматривающий обнаружение (5) неисправностей, выполняемое устройством управления внутри мехатронной системы (11), и идентификацию (7) неисправностей, выполняемую вычислительным устройством вне мехатронной системы (11), причем данные обнаружения (5) неисправностей и данные идентификации (7) неисправностей соединяют друг с другом с получением результатов полной диагностики (3) неисправностей, при обнаружении (5) неисправностей значения (u) для входных сигналов на входах системы и фактические значения (у) для выходных сигналов на выходах системы, а также вектор времени (t) записывают в память с управлением по обнаружению неисправностей, при обнаружении (5) неисправностей из фактического значения (у) выходного сигнала мехатронной системы (11) вычитают заданное значение (у') выходного параметра с получением остаточного значения (r), причем наличие неисправности (f, f1, f2, fi) устанавливают в том случае, если остаточное значение (r) превышает максимально допустимое пороговое значение (rMAX) обнаружения.
2. Способ по п.1, отличающийся тем, что сигналы за отрезок времени (t3), включающий в себя непосредственно момент (tF) возникновения неисправности, записывают в память по принципу кольцевой записи с управлением по обнаружению неисправностей.
3. Способ по п.1 или 2, отличающийся тем, что выбирают информативные значения (u, у) сигналов, поступивших за отрезок времени (t3).
4. Способ по п.1 или 2, отличающийся тем, что данные, зафиксированные в памяти при обнаружении (5) неисправностей, считывают из устройства управления, находящегося внутри мехатронной системы (11), через диагностический интерфейс и передают в вычислительное устройство, находящееся вне мехатронной системы (11).
5. Способ по п.3, отличающийся тем, что данные, зафиксированные в памяти при обнаружении (5) неисправностей, считывают из устройства управления, находящегося внутри мехатронной системы (11), через диагностический интерфейс и передают в вычислительное устройство, находящееся вне мехатронной системы (11).
6. Диагностическая система для основанной на модели диагностики мехатронной системы (11), содержащая устройство управления, расположенное внутри мехатронной системы (11), и вычислительное устройство, расположенное вне мехатронной системы (11), причем устройство управления выполнено с возможностью обнаружения (5) неисправностей, возникающих в мехатронной системе, а вычислительное устройство (7) - с возможностью идентификации обнаруженных неисправностей, причем диагностическая система выполнена с возможностью
соединения данных обнаружения (5) неисправностей и данных идентификации (7) неисправностей друг с другом с получением результатов полной диагностики (3) неисправностей,
осуществляемой при обнаружении (5) неисправностей записи в память значений (u) для входных сигналов на входах системы и фактические значения (у) для выходных сигналов на выходах системы, а также вектора времени (t), с управлением по обнаружению неисправностей,
осуществляемого при обнаружении (5) неисправностей вычитания заданного значения (у') выходного параметра из фактического значения (у) выходного сигнала мехатронной системы (11) с получением остаточного значения (r),
установления наличия неисправности (f, f1, f2, fi) в том случае, если остаточное значение (r) превышает максимально допустимое пороговое значение (rMAX) обнаружения.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2104883C1 |
| DE 4445903 A1, 04.07.1996 | |||
| US 4989146, 29.01.1991 | |||
| US 5041976, 20.08.1991 | |||
| US 5781871 A, 14.07.1998. | |||

