Область техники
Изобретение относится, в целом, к системе и способу управления направлением для гибридного транспортного средства воздушной и наземной транспортировки.
Уровень техники
Транспортные средства для наземной транспортировки (например, автомобили) и для воздушной транспортировки (например, самолеты) существуют многие годы. В самые последние годы нарастающее усилие было направлено на разработку другой категории транспортных средств, которая является гибридным транспортным средством, которое полностью совместимо с воздушным и обычным наземным использованием одновременно.
Одним таким гибридным транспортным средством является "Terrafugia Transition", описанное в WO 2007/114877 (далее - WO'877). WO'877 раскрывает транспортное средство, которое является и автомобилем, а также и двухместным самолетом, оборудованным четырехколесным шасси и складными крыльями. Мощность двигателя на земле передается передней оси, колеса управляются посредством традиционного рулевого колеса, в то время как в воздухе двигатель вращает винт, расположенный в задней части фюзеляжа транспортного средства. Во время полета транспортное средство управляется посредством традиционной штурвальной колонки или штурвала.
"AeroMobil" является другим гибридным транспортным средством, описанным в WO 2013/032409 (далее - WO'409). WO'409 также раскрывает гибридное транспортное средство, в котором наземное рулевое управление осуществляется посредством рулевого колеса, а управление в воздухе осуществляется посредством штурвальной колонки или штурвала.
Наличие отдельных систем управления (например, рулевого колеса и штурвальной колонки) для наземной и воздушной эксплуатации может быть неблагоприятным по множеству причин. Например, наличие отдельных систем управления может увеличивать сложность конструкции транспортного средства и использовать лишнее пространство в кабине, которое обычно является дефицитным. Кроме того, во время взлета и приземления водителю транспортного средства необходимо быстро переходить от одной системы управления к другой, когда транспортное средство отрывается от земли во время взлета или приземляется во время посадки. Быстрое переключение с одной системы управления (например, рулевого колеса) на другую (например, штурвальную колонку) может быть затруднительным по множеству причин. Например, расстояние между органами управления, ориентация органов управления и режим управления, все могут затруднять для водителя переключение между системами.
Решение этих проблем предоставляет систему, в которой две системы управления могут быть близко расположены, чтобы предоставлять возможность легкого перехода при использовании водителем.
Сущность изобретения
В одном аспекте изобретение направлено на систему управления направлением для гибридного транспортного средства для наземной и воздушной транспортировки. Транспортное средство имеет, по меньшей мере, одно рулевое колесо для использования в наземной эксплуатации, колесо соединяется с рулевым механизмом, крыльями, имеющими подвижные рулевые поверхности, и хвостом, имеющим, по меньшей мере, одну подвижную рулевую поверхность. Система управления направлением включает в себя первый вал, имеющий первое входное устройство управления на одном конце, при этом первый вал связан с рулевым механизмом, и второй вал, который проходит сквозь первый вал и является независимо вращаемым и скользящим относительно первого вала. Второй вал включает в себя второе входное устройство управления на одном конце, первую тягу, сконфигурированную, чтобы передавать вращательное движение второго вала, чтобы управлять подвижными рулевыми поверхностями на крыльях, и вторую тягу, сконфигурированную, чтобы передавать осевое движение второго вала, чтобы управлять подвижной рулевой поверхностью на хвосте. Первое входное устройство управления может быть рулевым колесом, а второе входное устройство управления - рулевым колесом или штурвальной колонкой. Первый вал может дополнительно включать в себя соединитель, присоединенный к первому валу. Соединитель может содержать элемент, протягивающийся наружу, перпендикулярно от внешней поверхности первого вала. Второй вал может включать в себя радиальную первую тягу, осевую вторую тягу и фиксирующее устройство. Радиальная первая тяга может содержать элемент, который проходит перпендикулярно наружу от внешней поверхности второго вала. Осевая вторая тяга может содержать стержневой кронштейн крепления, присоединенный к нижнему концу второго вала. Система соединения элерона может включать в себя множество взаимосвязанных качающихся рычагов и угловых рычагов. Система соединения руля высоты может включать в себя множество взаимосвязанных качающихся рычагов и угловых рычагов. Система соединения руля высоты может также включать в себя промежуточную структуру, содержащую поперечный вал и конструкцию соединительного плеча.
В другом аспекте изобретение относится к способу управления гибридным транспортным средством для наземной и воздушной эксплуатации, транспортное средство имеет систему управления направлением, которая описана в данном документе Способ включает в себя рулевое управление транспортным средством во время наземной эксплуатации посредством манипулирования первым входным устройством управления, чтобы рулить колесами, и управление маневрами в полете во время полетной эксплуатации посредством манипулирования вторым входным устройством управления, чтобы перемещать рулевые поверхности на крыльях и хвосте.
Краткое описание чертежей
Прилагаемые чертежи иллюстрируют варианты осуществления систем управления и способов эксплуатации. На чертежах:
Фиг. 1 - вид в перспективе сбоку для одного варианта осуществления гибридного транспортного средства, сконфигурированного для воздушной эксплуатации.
Фиг. 2 - вид в перспективе сбоку гибридного транспортного средства, сконфигурированного для наземной эксплуатации.
Фиг. 3 - фрагмент одного варианта осуществления системы управления для гибридного транспортного средства.
Фиг. 4 - фрагмент одного варианта осуществления системы управления для гибридного транспортного средства воздушной и наземной транспортировки согласно примерному варианту осуществления.
Фиг. 5 - фрагмент одного варианта осуществления системы рулевого управления для гибридного транспортного средства воздушной и наземной транспортировки.
Фиг. 6 - фрагмент одного варианта осуществления системы рулевого управления для гибридного транспортного средства воздушной и наземной транспортировки.
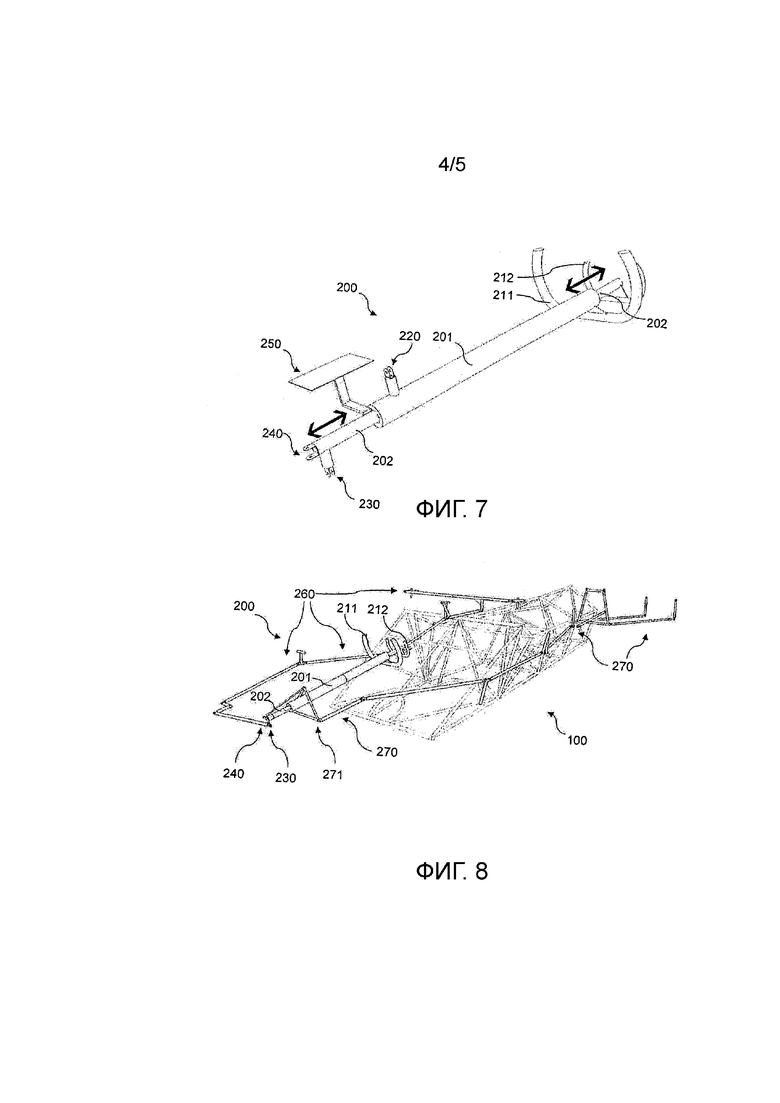
Фиг. 7 - фрагмент одного варианта осуществления системы рулевого управления для гибридного транспортного средства воздушной и наземной транспортировки.
Фиг. 8 - фрагмент одного варианта осуществления системы рулевого управления и систем соединения тяг для гибридного транспортного средства воздушной и наземной транспортировки.
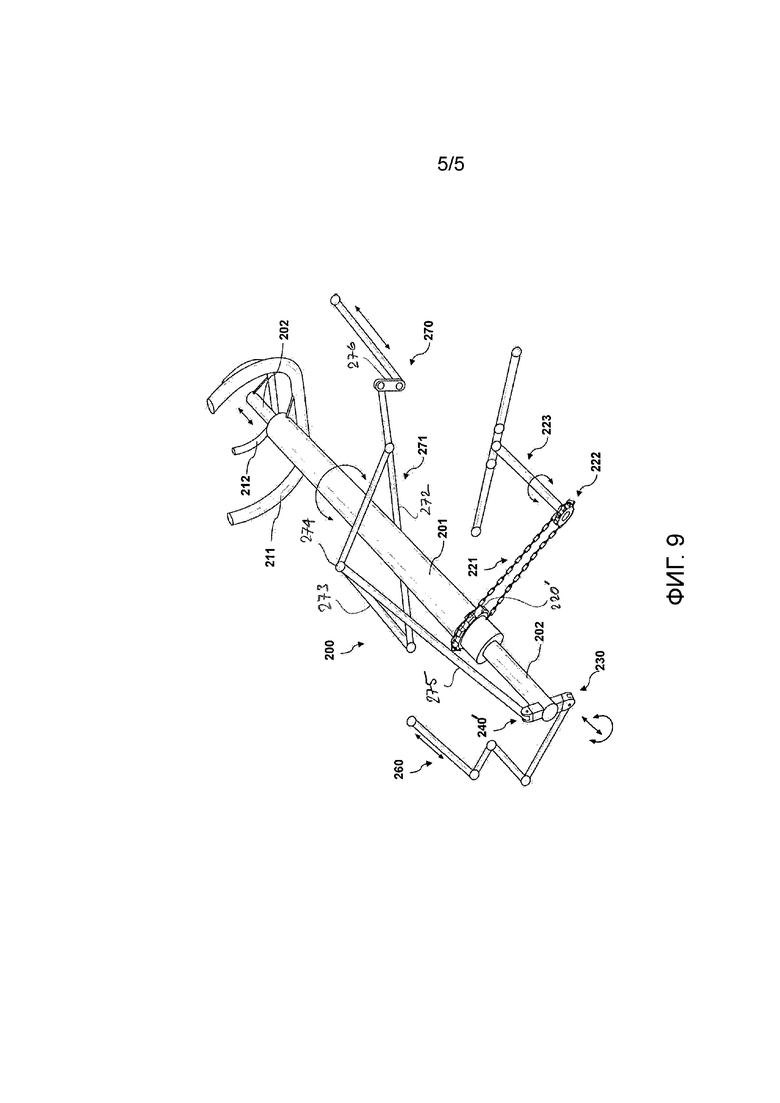
Фиг. 9 - краткий и содержательный вид одного варианта осуществления фрагмента системы рулевого управления и систем соединения тяг для гибридного транспортного средства воздушной и наземной транспортировки.
Теперь будет выполнена ссылка в деталях на неограничивающие примерные варианты осуществления, иллюстрированные на сопровождающих чертежах. По возможности, одинаковые номера ссылок будут использоваться повсюду на чертежах, чтобы ссылаться на одни и те же или аналогичные части.
Примеры вариантов осуществления изобретения
Фиг. 1 и 2 показывают гибридное транспортное средство 100, согласно одному примерному варианту осуществления, сконфигурированное для воздушной эксплуатации и наземной эксплуатации, соответственно. Транспортное средство 100 конфигурируется для воздушной эксплуатации, по меньшей мере, во время полета, рулежки, взлета и приземления. Конфигурация транспортного средства 100 может быть преобразована с воздушной эксплуатации на наземную эксплуатацию или наоборот во время нахождения на земле. Транспортное средство 100 конфигурируется для наземной эксплуатации во время движения на земле, например, движения по шоссе.
Транспортное средство 100 содержит кузов 110, кабину 120, множество убираемых крыльев 130, хвост 140, винт 150 и колеса, которые включают в себя множество передних колес 161 и задних колес 162. Транспортное средство 100 также имеет шасси и двигатель 170, содержащийся в кузове 110, сконфигурированный, чтобы приводить в движение винт 150 (во время воздушной эксплуатации) или передние колеса 161 или задние колеса 162 (во время наземной эксплуатации).
Как показано на фиг. 1 и 2, убираемые крылья 130 включают в себя элерон 131 на каждом крыле 130. Каждый элерон 131 соединяется с задней кромкой соответствующего крыла 130 посредством петли. Элероны 131 используются, чтобы управлять наклоном транспортного средства 100 вокруг его продольной оси во время полета обычным образом. Хвост 140 включает в себя руль 141 высоты на каждой стороне хвоста 140. Рули 141 высоты присоединяются к задней кромке каждой хвостовой секции посредством петли. Рули 141 высоты используются, чтобы управлять наклоном транспортного средства 100 относительно поперечной оси во время полета обычным образом.
Фиг. 3-8 показывают один примерный вариант осуществления системы 200 управления, сконфигурированной для использования с транспортным средством 100. Система 200 конфигурируется, чтобы предоставлять возможность управления направлением транспортного средства 100 во время воздушной и наземной эксплуатации. Система 200 включает в себя первый вал 201, имеющий первое входное устройство управления, в этом варианте осуществления рулевое колесо или штурвальную колонку 211, присоединенное к верхнему концу первого вала 201. Система 200 дополнительно включает в себя второй вал 202, имеющий второе входное устройство управления, опять же рулевое колесо или штурвальную колонку 212, присоединенное к верхнему концу второго вала 202. Первый вал 201 является валом подшипникового типа, так что второй вал 202 проходит соосно через центр первого вала 201, первый вал 201 и второй вал 202 являются независимо вращаемыми, а второй вал 202 также является скользящим вдоль продольной оси.
Как показано на фиг. 3-8, первое рулевое колесо 211 и второе рулевое колесо 212 являются "U"-образными, однако, предполагается, что могут быть использованы различные другие по форме рулевые колеса, например, круглые, овальные, "W"-образные и т.д. Первое рулевое колесо 211, как показано на фиг. 3-8, больше второго рулевого колеса 212. Однако, в других вариантах осуществления первое рулевое колесо 211 может быть равно или меньше второго рулевого колеса 212.
Первый вал 201 дополнительно включает в себя соединитель 220, присоединенный к первому валу 201. Соединитель 220 содержит элемент, протягивающийся наружу, перпендикулярно от внешней поверхности первого вала 201, как показано на фиг. 3-7. Соединитель 220 дополнительно включает в себя стержневой кронштейн крепления, присоединенный к внешнему концу элемента. Как показано на фиг. 3-8, соединитель 220 может быть расположен так, что, когда первое рулевое колесо 211 нормально центрировано, соединитель 220 направлен вверх.
Как показано на фиг. 5, система 200 конфигурируется так, что вращение первого рулевого колеса 211 вызывает соответствующее вращение первого вала 201 и соединителя 220 вокруг продольной оси. Соединитель 220 конфигурируется, чтобы соединять с механизмом (не показан) для рулевого управления передними колесами 161. Следовательно, вращение первого рулевого колеса 211 управляет направлением передних колес 161, посредством вращения первого вала 201 и соединителя 220, так что водитель транспортного средства 100 во время эксплуатации на земле может управлять направлением передних колес 161, поворачивая первое рулевое колесо 211. Первый вал 201 может действовать как полый вал оси вращения. Предполагается, что в другом варианте осуществления система 200 может быть сконфигурирована так, что вращение первого рулевого колеса 211 может управлять направлением задних колес 162.
Согласно другому варианту осуществления, соединитель 220', как показано на фиг. 9, является зубчатым колесом, звездочкой или шкивом, который оборачивается вокруг окружности первого вала 201. Гибкое соединение 221 наматывается вокруг соединителя 220' и проходит вокруг второго соединителя 222, который содержит другое зубчатое колесо, звездочку или шкив. Второй соединитель 222 соединяется с рулевым валом 223, так что вращение второго соединителя 222 вызывает вращение рулевого вала 223 и, тем самым, управляет направлением передних колес 161. Гибкое соединение 221 может быть цепью, тросом, ремнем или т.п. Соединитель 220' может иметь диаметр, отличный (например, больший), чем второй соединитель 222, так что вращение первого вала 201 посредством поворота первого рулевого колеса 211 вызывает зацепление вращения рулевого вала 223 в отношении диаметров. Например, если соединитель 220' имеет диаметр вдвое больше второго соединителя 222, полуоборот первого рулевого колеса 211 вызовет полный оборот второго соединителя 222, а также полный оборот рулевого вала 223. Передаточное отношение соединителя 220 ко второму соединителю 222 может быть выбрано, например, так, что полный диапазон руления, применяемого к колесам, может быть достигнут с помощью не более чем одного полного оборота первого рулевого колеса 211.
Как показано на фиг. 3-8, второй вал 202 включает в себя радиальную первую тягу 230, осевую вторую тягу 240 и фиксирующее устройство 250. Как показано на фиг. 6, система 200 конфигурируется так, что вращение второго рулевого колеса 212 вызывает соответствующее вращение второго вала 202, радиальной первой тяги 230 и осевой второй тяги 240 вокруг продольной оси. Как показано на фиг. 7, система 200 конфигурируется так, что толкание вниз и/или вытягивание вверх на втором рулевом колесе 212 вызывает продольное перемещение второго вала 202, радиальной первой тяги 230 и осевой второй тяги 240 вдоль продольной оси.
Радиальная первая тяга 230 содержит элемент, который проходит перпендикулярно наружу от внешней поверхности второго вала 202, как показано на фиг. 3-8. Радиальная первая тяга 230 дополнительно включает в себя стержневой кронштейн крепления на своем внешнем конце. Радиальная первая тяга 230 позиционируется так, что, когда второе рулевое колесо 212 нормально центрировано, радиальная первая тяга 230 направлена вниз перпендикулярно внешней поверхности второго вала 202. Осевая вторая тяга 240 содержит стержневой кронштейн крепления, присоединенный к нижнему концу второго вала 202, как показано на фиг. 3-8.
Радиальная первая тяга 230 соединяется с механизмом для управления элеронами 131, в то время как осевая вторая тяга 240 соединяется с механизмом для управления рулями 141 высоты. Система 200 конфигурируется так, что вращение второго рулевого колеса 212, посредством вращения второго вала 202 и радиальной первой тяги 230, управляет элеронами 131, чтобы предоставлять возможность водителю вращать вокруг продольной оси или выполнять вираж транспортного средства 100 в полете. Система 200 конфигурируется так, что толкание вниз и/или вытягивание вверх второго рулевого колеса 212, тем самым, вызывая продольное перемещение осевой второй тяги 240 вдоль продольной оси, управляет рулями 141 высоты, чтобы предоставлять возможность водителю регулировать наклон относительно поперечной оси транспортного средства 100 во время полета.
Соединительные компоненты между радиальной первой тягой 230 и механизмом для управления элеронами 131, и между осевой второй тягой 240 и механизмом для управления рулями 141 высоты включают в себя различные тяговые компоненты. Например, соединительные компоненты могут включать в себя вилкообразные механизмы с осями, тросами, стержнями, качающимися рычагами, угловыми рычагами и т.д.
Фиг. 8 показывает систему 260 соединения элерона и систему 270 соединения руля высоты, согласно примерному варианту осуществления. Система 260 соединения элерона конфигурируется, чтобы переносить вращательное движение радиальной первой тяги 230 на механизм для управления элеронами 131. Система 260 соединения элерона включает в себя множество взаимосвязанных качающихся рычагов и угловых рычагов. Система 270 соединения руля высоты конфигурируется, чтобы переносить продольное движение осевой второй тяги 240 на механизм для управления рулей 141 высоты. Система 270 соединения руля высоты включает в себя множество взаимосвязанных качающихся рычагов и угловых рычагов. Как показано на фиг. 8 и 9, система 270 соединения руля высоты может также включать в себя промежуточную структуру 271, содержащую поперечный вал 272 и конструкцию 273 соединительного рычага. Поперечный вал 272 лежит приблизительно под прямыми углами к продольной оси транспортного средства 100 и вращается вокруг его продольной оси. Конструкция 273 соединительного рычага проходит от одного конца поперечного вала 272 к точке 274 соединения, расположенной с интервалом от поперечного вала 272 и между его концами. В вариантах осуществления, показанных на фиг. 8 и 9, конструкция соединительного рычага проходит за точку 274 соединения обратно к поперечному валу 272, чтобы формировать треугольную конструкцию. Первый и второй валы 201, 202 проходят через треугольник, а раскос 275 тяг проходит между осевой второй тягой 240 и точкой 274 соединения. Осевое перемещение второго вала 202 преобразуется во вращательное перемещение поперечного вала 272. Рулевая сошка 276 предусматривается на одном конце поперечного вала 272 и соединяется с системой 270 соединения руля высоты. Отношение отделения точки 274 соединения от поперечного вала 272 к длине рулевой сошки 276 обеспечивает рычаг, действующий относительно центра вращения, определенного поперечным валом 272. Таким образом, усилие, доступное от водителя, может быть приложено к рулям 141 высоты наиболее подходящим образом. Посредством протяжения валов 201, 202 через треугольную структуру общая длина, занимаемая этой конструкцией, минимизируется, и пространство остается под поперечным валом 272 (для дополнительных органов управления, таких как органы управления педалями, или ступней или ног водителя, не показаны). Будет понятно, что формы, отличные от треугольника, могут быть использованы для конструкции 274 соединительного рычага, такие как другие многоугольные формы, кривые и т.д. Также необязательно, что оба конца соединительной рычажной конструкции 273 соединяются с поперечным валом 272. Открытая конструкция также возможна.
Фиг. 9 показывает другой примерный вариант осуществления системы 200, в котором вторая тяга 240' позиционируется на окружности второго вала 202 напротив радиальной первой тяги 230 на конце второго вала 202. Вторая тяга 240' соединяется с промежуточной структурой 271 посредством раскоса 275 тяг, как описано выше. Соединение второй тяги 240' с промежуточной структурой 271 может быть соединение типа шарового шарнира, чтобы предоставлять возможность вращения второй тяги 240', вызванного вращением второго вала 202. Радиальная первая тяга 230 и система 260 соединения элерона работают тем же образом, что и описано выше.
Фиксирующее устройство 250, согласно примерному варианту осуществления, является L-образным кронштейном и пластиной, ассоциированной со вторым валом 202, как показано на фиг. 3-7. Фиксирующее устройство 250 конфигурируется, чтобы иметь фиксирующую и нефиксирующую позицию. Фиг. 3 показывает фиксирующее устройство 250 в нефиксирующей позиции, в то время как фиг. 4 показывает фиксирующее устройство 250 в фиксирующей позиции. Как показано на фиг. 3, в нефиксирующей позиции второе рулевое колесо 212 может протягиваться выше первого рулевого колеса 211 (т.е. ближе к водителю), и второе рулевое колесо 212 может свободно вращаться вокруг и скользить вдоль продольной оси внутри первого вала 201, предоставляя возможность управления наклоном транспортного средства 100 относительно продольной и поперечной оси.
Как показано на фиг. 4, в фиксирующей позиции второе рулевое колесо 212 и второй вал 202 могут быть опущены вниз, так что первое рулевое колесо 211 и второе рулевое колесо 212 находятся практически на одинаковой высоте и могут также быть выровнены. В фиксирующей позиции фиксирующее устройство 250 конфигурируется, чтобы препятствовать осевому вращению и продольному перемещению второго вала 202 внутри первого вала 201, тем самым, запрещая управление наклоном транспортного средства 100 относительно продольной и поперечной оси. Запрет управления наклоном транспортного средства 100 относительно продольной и поперечной оси желателен во время эксплуатации в наземном режиме, поскольку такое управление является излишним, и перемещение элеронов 131 и рулей 141 высоты во время эксплуатации в наземном режиме может повреждать транспортное средство 100. При переходе от воздушного режима к наземному режиму водитель может позиционировать фиксирующее устройство 250 в фиксирующую позицию. Альтернативно, транспортное средство 100 может быть сконфигурировано, чтобы автоматически переходить между фиксирующей позицией и нефиксирующей позицией во время перехода от воздушного режима к наземному режиму или наземного режима к воздушному режиму. Согласно примерному варианту осуществления фиксирующее устройство 250 конфигурируется, чтобы предотвращать осевое вращение и продольное перемещение второго вала 202, взаимно блокируя L-образный кронштейн со штифтом, который проходит через L-образный кронштейн в отверстие второго вала 202.
Согласно другому примерному варианту осуществления второй вал 202 может быть сформирован из двух или более секций, так что верхняя секция второго вала 202, которая соединяется со вторым рулевым колесом 212, может быть съемной с первого вала 201. Следовательно, водитель может снимать второе рулевое колесо 212 и верхнюю секцию второго вала 202 во время эксплуатации в режиме езды. Система 200 конфигурируется так, что снятие второго рулевого колеса 212 и верхней секции второго вала 202 предотвращается, пока фиксирующее устройство 250 находится в фиксирующей позиции. Альтернативно, система 200 конфигурируется так, что снятие второго рулевого колеса 212 и верхней секции второго вала 202 выполняет ту же функцию, что и фиксирующее устройство 250 (например, предотвращает задействование элеронов 131 и руля 141 высоты во время эксплуатации в наземном режиме).
Согласно другому примерному варианту осуществления первое рулевое колесо 211 может быть съемным с первого вала 201, или оно может быть наклонено вперед в своей верхней части по направлению к первому валу 201, когда транспортное средство находится в воздушном режиме.
Система 200 может дополнительно включать в себя встроенные органы управления. Например, один или более рычажных переключателей, переключателей типа нажимных кнопок и вращаемых цилиндрических переключателей, расположенных на первом рулевом колесе 211, втором рулевом колесе 212 или обоих. Например, переключатель для управления одним или более подъемными закрылками и переключатель для изменения угла атаки крыльев 130 могут быть расположены на первом рулевом колесе 211 и/или втором рулевом колесе 212. Позиция переключателей на первом рулевом колесе 211 и/или втором рулевом колесе 212 предоставляет возможность более легкой доступности для водителя транспортного средства 100.
Предполагается, что в другом варианте осуществления первое рулевое колесо 211 и второе рулевое колесо 212 поменяны местами, так что первое рулевое колесо 211 управляет наклоном транспортного средства 100 относительно продольной и поперечной оси, а второе рулевое колесо 212 управляет направлением передних колес 161. Для этого варианта осуществления соединитель 220 для рулевого управления передними колесами и осевая вторая тяга 240 и радиальная первая тяга 230 могут быть поменяны местами.
Раскрытая система рулевого управления может быть применима к любому гибридному транспортному средству воздушной и наземной транспортировки, также как независимо применима к автомобилям и самолету. Раскрытая система рулевого управления может упрощать эксплуатацию транспортного средства 100, предоставляя возможность органам рулевого управления как воздушного режима, так и наземного режима, позиционироваться непосредственно впереди водителя. Кроме того, это упрощение может уменьшать пространство в кабине 120, используемое независимыми системами рулевого управления.
Когда водитель эксплуатирует транспортное средство 100 в наземном режиме, водитель может использовать первое рулевое колесо 211, чтобы управлять направлением передних колес 161 аналогично тому, как водитель может оперировать рулевым колесом в традиционном автомобиле, чтобы управлять передними колесами автомобиля. Когда водитель эксплуатирует транспортное средство 100 в воздушном режиме, например, во время полета, водитель может использовать второе рулевое колесо 212, чтобы управлять наклоном транспортного средства 100 относительно продольной и поперечной оси.
Перед взлетом или после посадки транспортное средство 100 может быть сконфигурировано для воздушного режима, но эксплуатироваться на земле. Учитывая эти ситуации, система 200 может быть сконфигурирована так, что во время эксплуатации в воздушном режиме на земле первое рулевое колесо 211 может быть использовано, чтобы управлять направлением передних колес 161. Например, когда транспортное средство 100 находится на земле, приготавливаясь к взлету или после приземления, водитель может использовать первое рулевое колесо 211, чтобы рулить транспортным средством 100. Водитель может также использовать второе рулевое колесо 212, чтобы рулить транспортным средством 100, как будто это традиционный самолет, если желательно.
Способность водителя быстро перемещать свои руки с первого рулевого колеса 211 на второе рулевое колесо 212 или наоборот вследствие связанной конструкции системы 200 может быть очень полезным во время взлета и посадки транспортного средства 100. Например, система 200 предоставляет возможность водителю использовать первое рулевое колесо 211, чтобы рулить транспортным средством 100 во время взлета до точки, где транспортное средство 100 отрывается от земли, тем самым, предотвращая дальнейшее руление посредством передних колес 161. Но вместо необходимости водителю переходить от рулевого колеса к рычажному управлению система 200 предоставляет возможность водителю мгновенно переносить руки с первого рулевого колеса 211 на второе рулевое колесо 212 и начинать управление наклоном самолета относительно продольной и поперечной оси. Система 200 также предоставляет возможность аналогичного перехода водителем транспортного средства 100 во время приземления за исключением перехода от второго рулевого колеса 212 к первому рулевому колесу 211, после того как передние колеса 161 приземляются. Также предполагается, что порой может быть полезным использовать первое рулевое колесо 211 и второе рулевое колесо 212 одновременно, что водитель может легко выполнять одной рукой на каждом рулевом колесе.
Различные модификации и вариации могут быть выполнены в системах и способах управления, описанных в данном документе.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦЕНТРАЛЬНАЯ ПАНЕЛЬ КРЫЛА ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА И СПОСОБ ДЛЯ ЕЕ УПРАВЛЕНИЯ | 2015 |
|
RU2687543C2 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ | 2018 |
|
RU2676213C1 |
| ТРАНСПОРТНЫЙ САМОЛЕТ "САМОЛЕТ В.С.ГРИГОРЧУКА" | 1995 |
|
RU2086478C1 |
| СИСТЕМА И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ПРИЦЕПОМ, ПРИСОЕДИНЕННЫМ К ТРАНСПОРТНОМУ СРЕДСТВУ | 2012 |
|
RU2534600C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ ЭЛЕКТРИЧЕСКОГО РУЛЕВОГО УПРАВЛЕНИЯ С УСИЛИТЕЛЕМ ДЛЯ АВТОМОБИЛЯ | 2013 |
|
RU2619500C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ОЧИСТКИ СНЕГА ПОСРЕДСТВОМ ПРОЦЕССОРА(ОВ) ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2682683C2 |
| СПОСОБ ПОДАЧИ ПИТАНИЯ НА СИСТЕМУ ЭЛЕКТРОУСИЛИТЕЛЯ РУЛЯ | 2012 |
|
RU2577809C2 |
| СПОСОБ И СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2570855C2 |
| СНЕГОХОД | 2009 |
|
RU2517918C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА, ПРЕОБРАЗУЕМОГО В ЛЕТАТЕЛЬНЫЙ АППАРАТ, И ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕОБРАЗУЕМОЕ В ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1999 |
|
RU2169085C1 |



Изобретение относится к конструкциям гибридных транспортных средств. Транспортное средство имеет, по меньшей мере, одно рулевое колесо для использования в наземной эксплуатации. Колесо соединено с рулевым механизмом, крыльями, имеющими подвижные рулевые поверхности, и хвостом, имеющим, по меньшей мере, одну подвижную рулевую поверхность. Система управления направлением имеет первый вал, имеющий первое входное устройство управления на одном конце, при этом первый вал связан с рулевым механизмом, и второй вал, который проходит сквозь первый вал и является независимо вращаемым и скользящим относительно первого вала. Второй вал включает в себя второе входное устройство управления на одном конце, первую тягу, сконфигурированную, чтобы передавать вращательное движение второго вала, чтобы управлять подвижными рулевыми поверхностями на крыльях, и вторую тягу, сконфигурированную, чтобы передавать осевое движение второго вала, чтобы управлять подвижной рулевой поверхностью на хвосте. Обеспечивается возможность легкого перехода с одной системы управления на другую водителем. 2 н. и 20 з.п. ф-лы, 9 ил.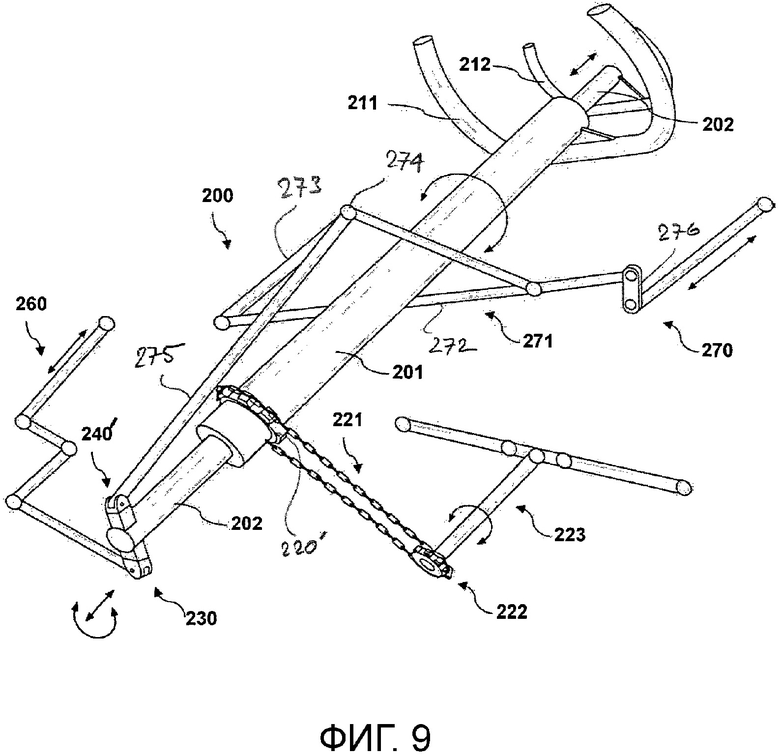
1. Система управления направлением для гибридного транспортного средства для наземного и воздушного движения, отличающаяся тем, что она содержит, по меньшей мере, одно рулевое колесо для использования в наземной эксплуатации, соединенное с рулевым механизмом; крылья, имеющие подвижные рулевые поверхности; и хвост, имеющий, по меньшей мере, одну подвижную рулевую поверхность; при этом система управления направлением содержит:
первый вал, имеющий первое входное устройство управления на одном конце, причем первый вал соединен с рулевым механизмом; и
второй вал, который проходит сквозь первый вал и является независимо вращаемым и скользящим относительно первого вала; при этом второй вал имеет: второе входное устройство управления на одном конце, первую тягу, выполненную с возможностью передачи вращательного движения второго вала, чтобы управлять подвижными рулевыми поверхностями на крыльях, и вторую тягу, выполненную с возможностью передачи осевого движения второго вала, чтобы управлять подвижной рулевой поверхностью на хвосте.
2. Система управления направлением по п. 1, отличающаяся тем, что первый вал соединен с рулевым механизмом посредством цепи или зубчатого ремня, так что вращательное движение первого вала передается на вход рулевого механизма.
3. Система управления направлением по п. 1 или 2, отличающаяся тем, что первая тяга содержит плечо рычага первой тяги, проходящее радиально от второго вала.
4. Система управления направлением по любому из пп. 1-3, отличающаяся тем, что вторая тяга содержит плечо рычага второй тяги, проходящее радиально от второго вала.
5. Система управления направлением по п. 3 или 4, отличающаяся тем, что она дополнительно содержит механическую тягу между плечом рычага первой тяги и подвижными рулевыми поверхностями на крыльях.
6. Система управления направлением по любому из пп. 3-5, отличающаяся тем, что она дополнительно содержит механическую тягу между плечом рычага второй тяги и подвижной рулевой поверхностью на хвосте.
7. Система управления направлением по п. 6, отличающаяся тем, что механическая тяга между плечом рычага второй тяги и подвижной рулевой поверхностью на хвосте содержит поперечный вал и соединительное плечо, проходящее от крайней области вала до точки соединения между концами вала, расположенной с интервалом вбок от вала, причем плечо рычага второй тяги механически соединено с точкой соединения.
8. Система управления направлением по п. 7, отличающаяся тем, что первый и второй валы проходят между поперечным валом и соединительным плечом.
9. Система управления направлением по п. 7 или 8, отличающаяся тем, что соединительное плечо соединено с обоими концами поперечного вала.
10. Система управления направлением по любому из пп. 7-9, отличающаяся тем, что она дополнительно содержит третью тягу, проходящую от поперечного вала и выполненную с возможностью передачи вращательного движения поперечного вала, чтобы управлять подвижной рулевой поверхностью на хвосте.
11. Система управления направлением по любому предшествующему пункту, отличающаяся тем, что второй вал дополнительно включает в себя фиксирующее устройство, выполненное с возможностью ограничения осевого и вращательного движения второго вала, когда транспортное средство конфигурируется для наземной эксплуатации.
12. Система управления направлением по любому предшествующему пункту, отличающаяся тем, что первое и второе входные устройства управления содержат рулевые колеса или штурвальные колонки, выполненные с возможностью поворота вокруг общей оси.
13. Система управления направлением по п. 12, отличающаяся тем, что второе входное устройство управления является подвижным между позицией полета, в которой второе входное устройство управления располагается с интервалом по оси от первого входного устройства управления, и наземной позицией, в которой второе входное устройство управления по существу выравнивается с первым входным устройством управления.
14. Система управления направлением по любому из пп. 1-12, отличающаяся тем, что второй вал сформирован из двух или более секций, при этом первая секция второго вала, присоединенная ко второму входному устройству управления, является съемной с первого вала, в то время как транспортное средство конфигурируется для наземной эксплуатации.
15. Система управления направлением по любому из пп. 1-12, отличающаяся тем, что второе входное устройство управления второго вала является вторым рулевым колесом, которое имеет складные плечи рычагов, в то время как транспортное средство конфигурируется для наземной эксплуатации.
16. Система управления направлением по любому из пп. 1-12, отличающаяся тем, что первое входное устройство управления первого вала является первым рулевым колесом, которое является съемным или наклоняемым вперед посредством своей верхней части по направлению к первому валу, в то время как транспортное средство конфигурируется для воздушной эксплуатации.
17. Способ управления гибридным транспортным средством для наземной и воздушной эксплуатации, отличающийся тем, что транспортное средство содержит систему управления направлением по любому из предшествующих пунктов, причем способ включает этапы, на которых:
- выполняют руление транспортным средством во время наземной эксплуатации посредством манипулирования первым входным устройством управления, чтобы рулить колесами; и
- управляют маневрами в полете во время полетной эксплуатации посредством манипулирования вторым входным устройством управления, чтобы перемещать рулевые поверхности на крыльях и хвосте.
18. Способ по п. 17, отличающийся тем, что он дополнительно включает в себя этапы, на которых выдвигают второй вал так, что второе входное устройство управления отделяется в осевом направлении от первого входного устройства управления, когда транспортное средство конфигурируется для воздушной эксплуатации, и убирают второй вал так, что второе входное устройство управления по существу выровнено с первым входным устройством рулевого управления, когда транспортное средство конфигурируется для наземной эксплуатации.
19. Способ по п. 17 или 18, отличающийся тем, что он дополнительно включает в себя этап, на котором зацепляют фиксирующее устройство, выполненное с возможностью ограничения осевого и вращательного перемещения второго вала при конфигурировании транспортного средства для наземной эксплуатации.
20. Способ по п. 17, отличающийся тем, что он дополнительно включает в себя этапы, на которых отсоединяют и снимают второе входное устройство управления и секцию второго вала с первого вала или складывают плечи рычагов второго входного устройства управления, которое является колесом, при конфигурировании транспортного средства для наземной эксплуатации.
21. Способ по п. 17, отличающийся тем, что он дополнительно содержит вариант снятия первого входного устройства управления первого вала, которое является первым колесом, или он включает в себя вариант наклона первого входного устройства управления первого вала, которое является первым колесом, посредством его верхней части вперед по направлению к первому валу при конфигурировании транспортного средства для воздушной эксплуатации.
22. Способ по любому из пп. 17-21, отличающийся тем, что он дополнительно включает в себя этапы, на которых, во время взлета, первоначально управляют транспортным средством с помощью первого входного устройства управления и переходят ко второму входному устройству управления; а во время приземления первоначально управляют транспортным средством с помощью второго входного устройства управления и переходят к первому входному устройству управления.
| Способ укрепления грунтов | 1961 |
|
SU140753A1 |
| US 6082665 A1, 04.07.2000 | |||
| US 1494355 A1, 20.05.1924 | |||
| СПОСОБ ПОЛУЧЕНИЯ МЕЗО-ТЕТРАФЕНИЛТЕТРАБЕНЗОПОРФИНА ЦИНКА | 2002 |
|
RU2215003C2 |
| US 4986493 A1, 22.01.1991. | |||

