Изобретение относится к транспортному средству с изменяемым углом наклона, содержащему переднюю секцию рамы, имеющую продольную ось, сиденье водителя и одно или более колес, которые выполнены с возможностью поворота вокруг оси поворота переднего колеса, расположенной поперек к продольной оси, и заднюю секцию рамы с двумя колесами, которая соединена с передней секцией рамы таким образом, что она может наклоняться вокруг оси наклона, проходящей по существу в направлении продольной оси.
Транспортное средство данного типа с изменяемым углом наклона раскрыто в международной заявке на патент №WO95/34459.
В известном транспортном средстве с изменяемым углом наклона наклон передней секции рамы относительно задней секции рамы осуществляется посредством двух цилиндров при движении на повороте дороги. Передняя секция рамы имеет одно колесо, в то время как задняя секция рамы выполнена с двумя колесами. Момент, действующий на переднее колесо относительно оси поворота переднего колеса, измеряется датчиком силы. Этот момент вызывает формирование управляющего сигнала, который приводит в действие цилиндры механизма наклона, в результате чего обеспечивается по существу устойчивый наклон. Движение цилиндров наклона блокируется в тот момент времени, когда сила или момент на переднем колесе равны нулю, что имеет место в тот момент времени, когда в зависимости от радиуса поворота, скорости транспортного средства и его веса, включая вес водителя, будет достигнута надлежащая степень наклона для движения на повороте дороги. Когда сила или момент на переднем колесе вокруг оси поворота переднего колеса равны нулю, наклонное положение передней секции рамы сохраняется постоянным. Также можно выполнить датчик в виде указателя положения, как описано в международной заявке на патент №WO99/14099. При такой конструкции водитель может приводить в действие цилиндры наклона путем поворота элемента рулевого управления относительно оси поворота переднего колеса, при этом переднее колесо поворачивается на надлежащий угол автоматически и в зависимости от скорости одновременно посредством механизма наклона, описанного в указанной заявке на патент.
Однако было установлено, что при высоких скоростях, то есть при скоростях свыше приблизительно 60 км в час, имеет место неустойчивое движение зигзагами всего транспортного средства как при движении прямо вперед, так и при движении на повороте дороги. Вследствие этого нежелательные колебания происходят в наклоняющейся кабине, в результате чего оказывается отрицательное воздействие на управление транспортным средством с изменяемым углом наклона.
Задача настоящего изобретения заключается в создании транспортного средства с изменяемым углом наклона, в котором избегают колебаний даже при сравнительно высоких скоростях.
Для этого в транспортном средстве с изменяемым углом наклона согласно изобретению колеса задней секции рамы выполнены с возможностью поворота вокруг оси поворота заднего колеса, проходящей по существу поперек к продольной оси, или с возможностью наклона относительно оси наклона заднего колеса, проходящей по существу в направлении продольной оси.
В основе изобретения лежит тот факт, что при наклоне передней секции рамы и соответствующем наклонном положении, которое принимает переднее колесо, для задних колес требуется сравнительно продолжительный период времени для увеличения поперечной силы. В соответствии с изобретением за счет одновременного поворота задних колес вокруг направленной по существу вертикально оси поворота заднего колеса в зависимости от наклона или за счет наклона задних колес вокруг оси наклона заднего колеса, которая проходит по существу в продольном направлении, задние колеса будут способны создавать достаточно большую поперечную силу достаточно быстро, и относительно неустойчивое управление с колебаниями на высоких скоростях как при движении на поворотах дороги, так и при движении по прямой полностью устраняется при одновременном сохранении предпочтительных характеристик управления и ощущения управляемости для водителя.
Наклон передней секции рамы может быть осуществлен за счет самобалансировки со стороны водителя посредством поворота переднего колеса и смещения веса. В этом случае транспортное средство с изменяемым углом наклона не предусмотрено с действующими средствами для осуществления наклона.
Однако предпочтительно, если наклон транспортного средства с изменяемым углом наклона осуществляется c помощью действующего устройства для выполнения наклона, которое может быть приведено в действие водителем и соединено, с одной стороны, с передней секцией рамы и, с другой стороны, с задней секцией рамы для выполнения наклона секций рамы относительно друг друга вокруг оси наклона, и транспортное средство с изменяемым углом наклона имеет датчик для формирования управляющего сигнала в зависимости от наклона передней и задней секций рамы относительно друг друга для управления устройством для выполнения наклона.
В предпочтительном варианте осуществления каждое из задних колес имеет независимую подвеску на своей собственной оси поворота заднего колеса. Задние колеса соединены посредством рычага управления, расположенного поперек к оси поворота заднего колеса, и посредством поперечной рулевой тяги в каждом случае с коленчатым рычагом, расположенным на продольной оси. Этот коленчатый рычаг соединен с передней секцией рамы таким образом, что он может поворачиваться вокруг продольной оси и проходит поперек продольной оси. При наклоне передней секции рамы вокруг продольной оси коленчатый рычаг поворачивается так, что рычаги управления задних колес смещаются и осуществляется поворот задних колес, который зависит от длины коленчатого рычага. Угол поворота можно точно отрегулировать путем изменения геометрии коленчатого рычага и рычага управления.
Несколько вариантов осуществления транспортного средства с изменяемым углом наклона согласно изобретению будут разъяснены более подробно со ссылкой на приложенные чертежи. На чертежах показано:
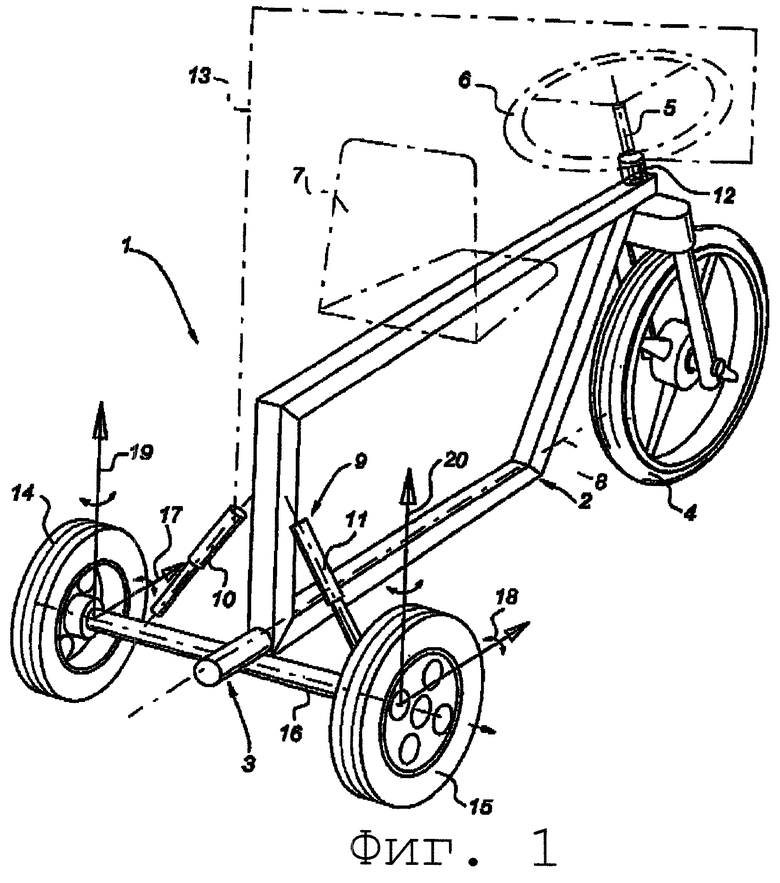
фиг.1 – схематичный вид в перспективе рамы транспортного средства с изменяемым углом наклона согласно настоящему изобретению, и фиг.2 и 3 - предпочтительный вариант осуществления конструкции механизма управления для задних колес транспортного средства с изменяемым углом наклона согласно настоящему изобретению.
На фиг.1 схематично изображено шасси транспортного средства 1 с изменяемым углом наклона согласно изобретению, выполненного с передней секцией 2 рамы и задней секцией 3 рамы, соединенной с передней секцией 2 рамы так, что она может наклоняться. Передняя секция 2 рамы имеет переднее колесо 4, которое может быть повернуто вокруг оси 5 поворота переднего колеса, показанной схематично, посредством рулевого колеса 6. Передняя секция 2 рамы имеет сиденье 7 водителя, схематично показанное на фиг.1. Передняя секция 2 рамы может быть наклонена вокруг оси 8' наклона, которая на фиг.1 совпадает с продольной осью 8. Наклон передней секции 2 рамы осуществляется посредством устройства 9 для выполнения наклона, содержащего два гидравлических цилиндра 10, 11, которые на одном конце соединены с задней секцией 3 рамы, а на другом конце соединены с передней секцией 2 рамы. Гидравлические цилиндры 10, 11 соединены с блоком управления, который не показан более подробно на фиг.1. Когда водитель поворачивает рулевое колесо 6, усилие на рулевом колесе или момент на рулевом колесе, действующий на переднее колесо 4, измеряется датчиком 12. Устройство 9, предназначенное для выполнения наклона, приводится в действие посредством магистрали 13, которая показана схематично, посредством датчика 12 для наклона передней секции 2 рамы относительно задней секции 3 рамы. Движение наклона продолжается до тех пор, пока сила или момент, измеряемая(ый) датчиком 12, не станет равной(ым) нулю. Когда сила или момент, фиксируемый датчиком 12, становится равной(ым) нулю, передняя секция 2 рамы удерживается в достигнутом наклонном положении, и цилиндры 10, 11 фиксируются в этом положении. Вместо датчика 12 силы или момента также можно использовать датчик изменения угла, как описано в международной заявке на патент №WO99/14099.
Также можно управлять наклоном с помощью компьютера на основе ускорений или угловых положений передней секции рамы, скоростей и/или угловых положений переднего колеса 4, определяемых датчиками. Изобретение также применимо к транспортным средствам с изменяемым углом наклона, в которых устройство 9 для выполнения наклона отсутствует.
Положение задних колес 14, 15 можно регулировать, для предотвращения колебаний при сравнительно высоких скоростях как при движении по прямой, так при движении на повороте. Задние колеса 14, 15 могут быть выполнены с возможностью управления их поворотом вокруг оси 19, 20 поворота заднего колеса, которая по существу перпендикулярна продольной оси 8. Задние колеса 14, 15 также могут быть соединены с задним мостом 16 так, что будет обеспечена возможность их наклона, то есть так, что плоскость задних колес может быть наклонена вокруг оси 17, 18 наклона заднего колеса, которая проходит по существу в направлении продольной оси 8, при этом используются характеристики управляемости наклоненных шин 14, 15.
Управление для выполнения наклона вокруг оси 17, 18 наклона заднего колеса или поворота вокруг оси 19, 20 поворота заднего колеса может зависеть от большого количества сигналов измеряемых параметров, таких как угол наклона передней секции 2 рамы, скорость наклона или ускорение при наклоне передней секции 2 рамы, угол крена, скорость крена или ускорение при крене ненаклоняющейся задней секции 3 рамы, силы, действующие со стороны шин на задние колеса 14, 15, или от комбинаций этих параметров. Было установлено, что надлежащий поворот задних колес 14, 15 может противодействовать нежелательным колебаниям при управлении транспортными средствами с изменяемым углом наклона.
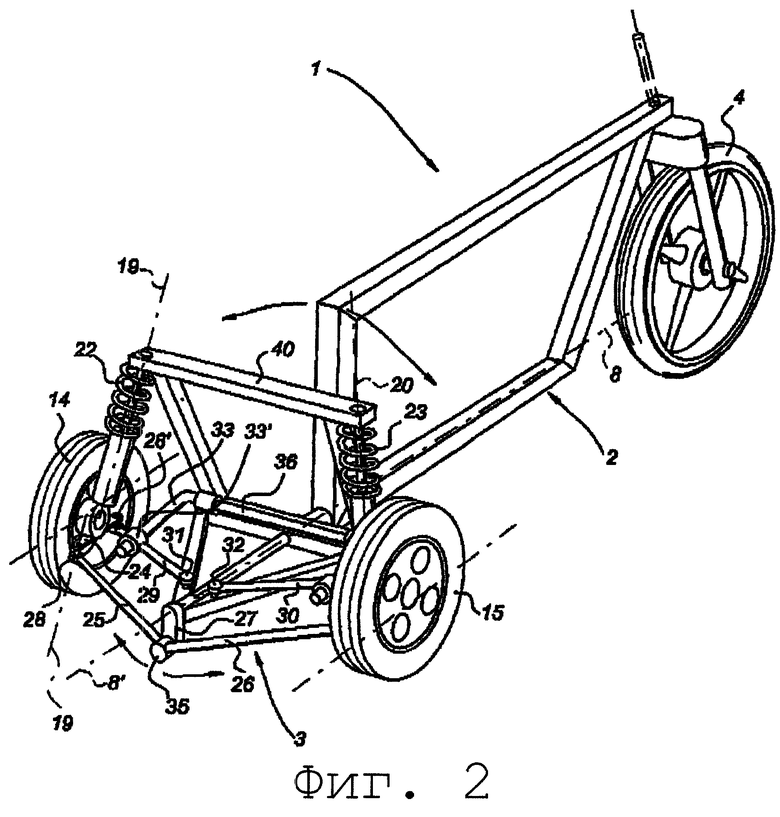
На фиг.2 показан предпочтительный вариант осуществления с задними колесами 14, 15 с независимой подвеской, каждое из которых подвешено так, что оно может поворачиваться вокруг своей собственной оси 19, 20 поворота заднего колеса. Каждое из задних колес 14, 15 подвешено посредством отдельного амортизатора 22, 23 к опорному элементу 40 задней секции 3 рамы. Каждое из задних колес 14, 15 выполнено с рычагом 24 управления, при этом рычаги 24 управления соединены посредством поперечной рулевой тяги 25, 26 с концом коленчатого рычага 27. Поперечные рулевые тяги 25, 26 соединены посредством соответствующих шаровых шарниров 28 с концом соответствующего рычага 24 управления. Коленчатый рычаг 27 жестко присоединен к передней секции 2 рамы и поворачивается вокруг продольной оси 8 при наклоне передней секции 2 рамы. В результате концы рычагов 24 управления смещаются и происходит поворот задних колес 14, 15 вокруг осей 19, 20 поворота задних колес, причем указанные оси поворота задних колес проходят через верхнюю точку крепления амортизаторов 22, 23 и шаровой шарнир 28.
Второй конец 28’ рычагов 24 управления соединен с задней секцией 3 рамы посредством поперечных рычагов 29, 30 и шаровых шарниров 31, 32, расположенных на конце поперечных рычагов 29, 30. Каждый из поперечных рычагов 29, 30 присоединен посредством резиновой подвески 33’ к продольной направляющей 33, при этом указанные продольные направляющие соединены друг с другом с помощью торсиона 36, который также служит в качестве стабилизатора крена для задней секции 3 рамы.
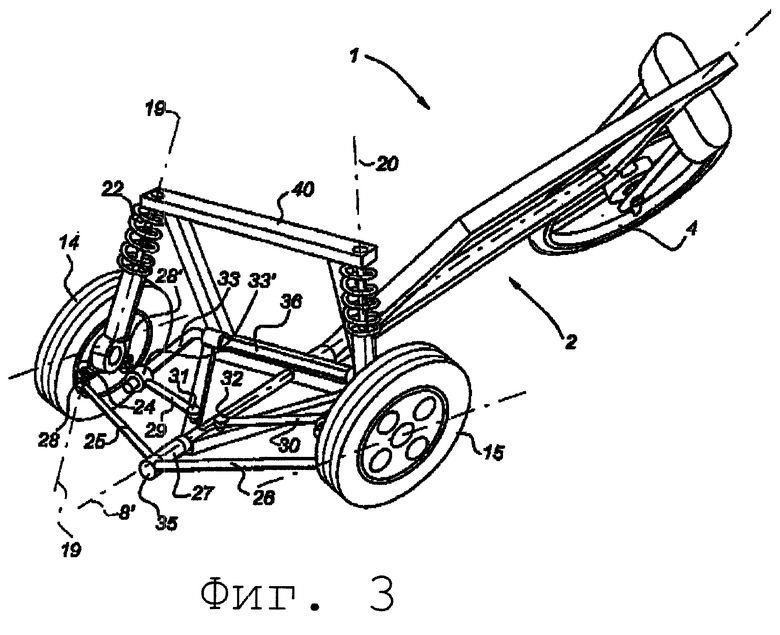
Как показано на фиг.3, при наклоне передней секции 2 рамы вправо (если смотреть с места водителя) коленчатый рычаг 27 будет поворачиваться влево, в результате чего колеса 14, 15 поворачиваются вправо вокруг осей 19, 20 поворота задних колес. В результате этого задние колеса 14, 15 смогут обеспечить достаточно быстрое увеличение поперечной силы для обеспечения предпочтительного управления на поворотах, что имеет важное значение главным образом при скоростях свыше 60 км в час. Угол поворота задних колес 14, 15 можно регулировать путем изменения длины коленчатого рычага 27, длины рычага 24 управления или положения точки 35 крепления поперечных рулевых тяг 25, 26 на коленчатом рычаге 27.
Несмотря на то, что изобретение было описано со ссылкой на транспортное средство с изменяемым углом наклона, имеющее одно переднее колесо 4, также можно использовать данное изобретение для транспортного средства с изменяемым углом наклона, которое выполнено с двумя передними колесами.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАКЛОНЯЮЩЕЕСЯ ТРАНСПОРТНОЕ СРЕДСТВО | 1998 |
|
RU2225310C2 |
| СРЕДСТВО ПЕРЕДВИЖЕНИЯ С ИЗМЕНЯЕМЫМ УГЛОМ НАКЛОНА | 1998 |
|
RU2205122C2 |
| АМФИБИЯ | 2007 |
|
RU2520665C2 |
| САМОХОДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2651528C1 |
| САМОСТАБИЛИЗИРУЮЩЕЕСЯ, УПРАВЛЯЕМОЕ ПО НАПРАВЛЕНИЮ ТРАНСПОРТНОЕ СРЕДСТВО С ПО МЕНЬШЕЙ МЕРЕ ТРЕМЯ КОЛЕСАМИ | 1995 |
|
RU2156201C2 |
| ВЕЗДЕХОД | 2008 |
|
RU2468957C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ПЕРЕМЕННОЙ КОЛЕЕЙ | 2011 |
|
RU2570184C2 |
| ПРИВОДНАЯ СИСТЕМА С ЗАМКНУТОЙ ЛЕНТОЙ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2378144C2 |
| МОТОРНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ВЫПОЛНЕНИЕМ РУЛЕНИЯ ДЛЯ УПРАВЛЯЕМОГО КОЛЕСА | 2012 |
|
RU2555902C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ НАПРАВЛЕНИЕМ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА ВОЗДУШНОЙ И НАЗЕМНОЙ ТРАНСПОРТИРОВКИ | 2015 |
|
RU2686803C2 |
Изобретение относится к стабилизации предпочтительно трехколесного транспортного средства. На передней секции (2) рамы установлены поворотное переднее колесо (4) и сиденье (7). Задняя секция (3) рамы с двумя колесами (14, 15) может наклоняться относительно передней секции (2) при повороте на дороге. При этом задние колеса (14, 15) имеют возможность поворота вокруг вертикальных осей (19, 20) поворота задних колес или могут быть наклонены вокруг продольных осей (17, 18) наклона задних колес. Техническое решение направлено на быстрое противодействие задних колес поперечной силе, возникающей при наклоне передней секции и соответствующем наклонном положении переднего колеса, и таким образом, предотвращение колебаний транспортного средства при сравнительно высоких скоростях. 7 з.п. ф-лы, 3 ил.
| Установка для промывки шлангов | 1979 |
|
SU878378A1 |
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| RU 97100735 A, 10.02.1999. | |||

