Изобретение относится к средству передвижения, обеспеченному
- по меньшей мере тремя колесами,
- рамой, содержащей первую часть рамы и вторую часть рамы, причем части рамы имеют возможность наклоняться относительно друг друга вокруг оси наклона, которая лежит в продольном направлении,
- по меньшей мере одним передним колесом, которое соединено с первой частью рамы и может наклоняться вокруг оси управления поворотом переднего колеса, расположенной по существу параллельно плоскости переднего колеса,
- рулевым колесом, которое соединено с возможностью вращения с первой частью рамы,
- средствами изменения угла наклона, которые соединены с первой и второй частями рамы для выполнения движения наклона между первой и второй частями рамы,
- датчиком, который связан с передним колесом и со средствами изменения угла наклона для формирования сигнала управления для приведения в действие средств изменения угла наклона.
Средство передвижения такого типа известно из международной заявки WO 95/34459 на имя настоящего заявителя. Этот документ описывает самобалансирующееся, предпочтительно трехколесное средство передвижения, в котором датчик, который в этом случае образован гидравлическим поворотным клапаном, измеряет силу момента на переднем колесе. Под воздействием сигнала от датчика передняя часть рамы, которая содержит кабину водителя и рулевое колесо, наклоняется, пока момент на переднем колесе по существу не станет равен нулю. Таким образом достигается самостабилизирующий наклон, который заставляет средство передвижения при движении устойчиво поворачиваться при всех скоростях. Так как узкие средства передвижения, как описано в заявке WO 95/34459, обычно имеют недостаточную поперечную устойчивость и маневренность, чтобы соответствовать нормальному (автомобильному) транспорту, система изменения угла наклона такого типа увеличивает устойчивость таким образом, что такое узкое средство передвижения может стать полноценно функционирующим транспортным средством. Описанная система изменения угла наклона является полностью автоматической, в результате чего водителю не требуется специального умения для управления средством передвижения. Известная система обеспечивает средство передвижения, которое работает безопасно и предсказуемо во всех приемлемых условиях управления средством передвижения.
Несмотря на то, что известное средство передвижения с изменяемым углом наклона очень эффективно, датчик силы для определения силы или момента на переднем колесе относительно сложен. Кроме того, чувствительность рулевого управления известного средства может быть дополнительно улучшена.
Поэтому целью настоящего изобретения является обеспечить средство передвижения с изменяемым углом наклона, которое содержит простое и надежное устройство управления наклоном в сочетании с обеспечением максимальной чувствительности рулевого механизма для водителя.
Для этого средство передвижения согласно настоящему изобретению отличается тем, что рулевое колесо соединено посредством оси рулевого управления с первой частью рамы, при этом ось рулевого управления может поворачиваться вокруг своей оси относительно оси управления поворотом переднего колеса, причем датчик определяет угол поворота между осью управления поворотом переднего колеса и осью рулевого управления.
Настоящее изобретение основано на том, что средство передвижения, которым может быть средство передвижения с изменяемым углом наклона, может управляться двумя по существу различными путями:
во-первых, водитель может непосредственно управлять положением переднего колеса или передних колес. Водитель, придавая определенное угловое смещение переднему колесу, обеспечивает радиус поворота средства передвижения;
во-вторых, водитель может непосредственно или косвенным образом управлять положением наклона средства передвижения. В этом случае сочетание скорости средства передвижения и положения наклона обеспечивает характерный радиус поворота. Переднее колесо занимает надлежащее положение, которое диктуется скоростью и положением наклона, причем положение переднего колеса не используется для определения направления движения. По этому принципу работает мотоцикл. Путем сложного маневрирования водитель непрерывно регулирует положение наклона, достигая необходимого направления движения. На практике было обнаружено, что таким образом можно обеспечить легко управляемое средство передвижения. В средстве передвижения согласно этому изобретению водитель может фиксировать положение наклона непосредственно с помощью средства изменения угла наклона в отличие от фиксирования положения наклона посредством рулевых тяг, что происходит в мотоцикле. Согласно изобретению оптимальным инструментом, позволяющим водителю управлять и приводить в действие систему изменения угла наклона, содержащую средства изменения угла наклона, и таким образом регулировать положение наклона, является рулевое колесо. Согласно изобретению стандартное жесткое соединение между рулевым колесом и передним колесом заменяется соединением, в котором ось рулевого управления может вращаться вокруг своей оси относительно оси управления поворотом переднего колеса. Это гибкое соединение, в котором устанавливается датчик угла поворота, обеспечивает сигнал для необходимого положения наклона средства передвижения. Затем может осуществляться наклон средства передвижения. Оптимальное положение переднего колеса, которое необходимо для комбинации угла наклона и скорости движения, автоматически устанавливается, не требуя умения водителя.
Система изменения угла наклона согласно настоящему изобретению дает возможность использовать датчик очень простой конструкции, а также позволяет надежно и просто приводить в действие средства изменения угла наклона.
Датчик, устройство управления и средства изменения угла наклона сами по себе каждое могут использовать различные технологические принципы, например они могут быть механическими, гидравлическими, пневматическими или электрическими. Настоящее изобретение обеспечит описание (в основном) гидравлической конструкции компонентов. В этом случае датчик угла поворота может содержать цилиндр, который соединен первым концом с передним колесом, в вторым концом - с рулевой колонкой. Средства изменения угла наклона могут содержать гидравлические или пневматические цилиндры, которые через клапан соединены с источником давления. Цилиндр датчика углового положения приводит в действие клапан средства изменения угла наклона. Этим клапаном может быть простой двухпозиционный скользящий золотник.
Средство передвижения согласно настоящему изобретению может содержать заднюю часть рамы, обеспеченную двумя колесами, и переднюю часть рамы, которая имеет одно колесо и может наклоняться относительно задней части рамы. Также можно использовать заднюю часть рамы, имеющую возможность наклона, обеспеченную одним колесом, и переднюю часть рамы, не имеющую возможности наклона, с двумя колесами. Наконец также можно использовать конструкцию рамы, имеющую возможность наклона, которая описана в патентной заявке Голландии 1005894 на имя настоящего заявителя.
В заявке ЕР-А-0592377 описано средство передвижения с изменяемым углом наклона, в котором наклон передней части рамы относительно задней части рамы, которая поддерживает передачу, достигается угловым смещением переднего колеса вокруг оси управления поворотом переднего колеса относительно рамы, при этом рулевое колесо и переднее колесо жестко соединены. Система такого типа имеет тот недостаток, что наклон не зависит от скорости средства передвижения и поэтому не точен. Таким образом, не достигается устойчивая езда.
В заявке ЕР-А-0020835 описано средство передвижения с изменяемым углом наклона, в котором положение наклона может достигаться от педалей или перемещением рулевой колонки поперек ее оси вращения. Ось рулевого управления также жестко соединена с передним колесом. В этом известном устройстве положение наклона не зависит от скорости средства передвижения, поэтому устойчивая езда не достигается.
Принцип работы средства передвижения согласно настоящему изобретению коренным образом отличается от принципа работы средств передвижения известного уровня техники, описанных выше. Когда водитель средства передвижения согласно изобретению едет прямо по гладкой поверхности дороги и хочет повернуть, он вращает рулевое колесо. Так как геометрия и гироскопическая стабильность переднего колеса подразумевают, что последнее стремится остаться направленным прямо вперед, угол поворота оси рулевого управления, диктуемый водителем, приведет к угловому смещению α между осью управления поворотом переднего колеса и осью рулевого управления. На основании этого углового смещения α датчик угла поворота формирует сигнал управления, который приводит в действие средства изменения угла наклона и первая часть рамы образует заданный угол наклона β. По мере увеличения угла наклона средства передвижения переднее колесо будет немного управляться внутрь под углом δ, который зависит от скорости движения. Если рулевое колесо затем удерживается под зафиксированным углом ϕ, угловое смещение рулевого колеса частично преобразуется в угол наклона и частично в угловое смещение переднего колеса вокруг оси управления поворотом переднего колеса. Этот угол наклона и угол переднего колеса автоматически дают идеальное соотношение (передаточного числа), которое подходит для любой скорости движения.
Регулируя соотношение между углом наклона β средства передвижения и углом α, определяемым датчиком, можно оказывать воздействие на езду. Для примера можно обеспечить связь 1:1, при этом вращение хo рулевого колеса относительно переднего колеса приводит к углу наклона хo.
В следующем примере реализации изобретения достигается ощущение управления соединением силового элемента с рулевой колонкой, который, когда угловое положение рулевой колонки увеличивается, оказывает увеличивающееся восстанавливающее усилие на рулевую колонку. Эта обратная силовая связь, под воздействием которой на рулевом колесе создается момент, когда рулевое колесо продолжает вращаться, обеспечивает ощущение управления и, когда рулевое колесо освобождается, возвращает средство передвижения в прямое положение. Так как угол наклона средства передвижения является мерой скорости, с которой средство передвижения проходит поворот, и благодаря тому, что этот угол наклона соотносится с углом, определяемым датчиком, между осью рулевого управления и осью управления поворотом переднего колеса, этот угол поэтому может быть использован в качестве меры для уровня обратного момента (контрмомента), воздействующего на водителя. Поэтому можно достигать успешного обратного усилия (отдачи) из "остроты угла" до "величины усилия, оказываемого на рулевое колесо". В качестве силового элемента возможно, например, расположить пружину, работающую на кручение, между осью управления поворотом переднего колеса и осью рулевого управления (усилие как функция α). Эта пружина может также быть установлена между рулевым колесом и передней частью рамы (усилие как функция угла ϕ рулевого колеса).
В следующем примере реализации изобретения средство передвижения содержит датчик скорости, который при заданном пределе скорости ограничивает угловое смещение между осью управления поворотом переднего колеса и осью рулевого управления. При низких скоростях, когда средство передвижения находится в состоянии покоя или при изменении направления на обратное, важно, чтобы механизмы наклона средства передвижения были отключены. Это достигается ограничением углового смещения между осью рулевого управления и осью управления поворотом переднего колеса. В одном примере реализации изобретения это достигается включением цилиндра управления с усилителем, который установлен между передним колесом и рамой, при низких скоростях. Если момент управления с усилителем контролируется как функция скорости, можно достигать отличного плавного перехода от "управления с усилителем без наклона" при состоянии покоя или при изменении направления на обратное в "управление без усилителя с полным наклоном" при обычной езде. В диапазоне перехода ситуация представляет собой "незначительное управление с усилителем с небольшим наклоном".
Также возможно в средстве передвижения, в котором управление с усилителем не требуется или не желательно, блокировать наклон при низких скоростях путем застопоривания углового смещения между осью управления поворотом переднего колеса и осью рулевого управления в центральном положении. В конструкции, которая изучается здесь, существует жесткая/гидравлическая связь между углом наклона β и угловым смещением α между осью управления поворотом переднего колеса и осью рулевого управления. В примере реализации такого типа можно выбирать вариант блокировки угла наклона, в результате чего средство передвижения надежно держится прямо и угловое смещение между осью управления поворотом переднего колеса и осью рулевого управления блокируется.
Один пример реализации средства передвижения с изменяемым углом наклона согласно настоящему изобретению будет объяснен более подробно со ссылкой на прилагаемые чертежи, в которых:
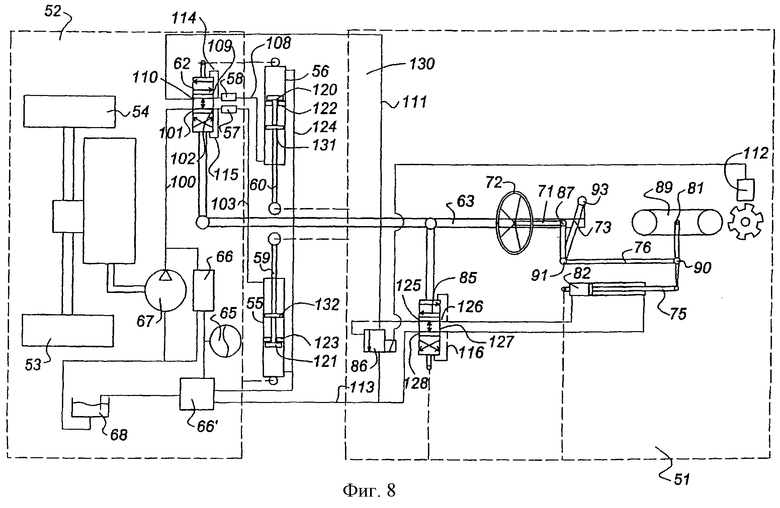
фиг. 1 является схематичным видом в перспективе средства передвижения согласно настоящему изобретению в положении прямой езды вперед, с датчиком угла поворота гидравлической конструкции,
фиг. 2 показывает изображение в перспективе средства передвижения согласно фиг.1 в положении с наклоном,
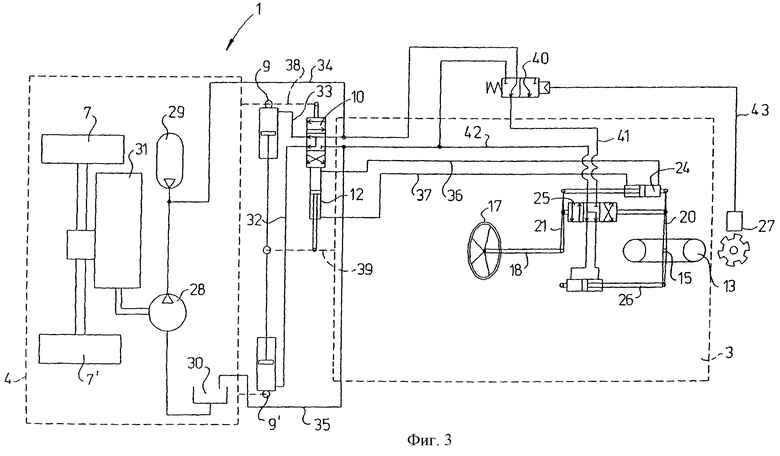
фиг. 3 показывает схему гидравлического контура средства передвижения фиг.1 и 2,
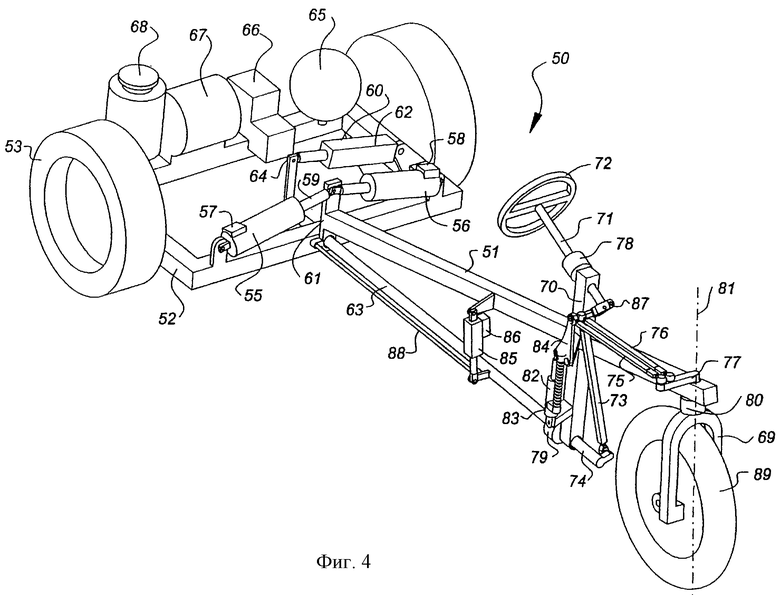
фиг.4 показывает вид в перспективе средства передвижения, в котором датчик угла поворота образован набором штанг,
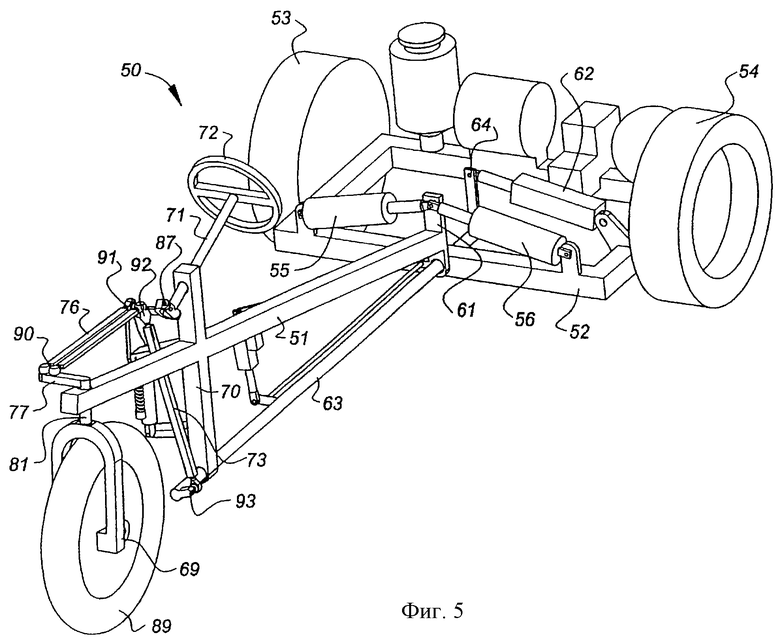
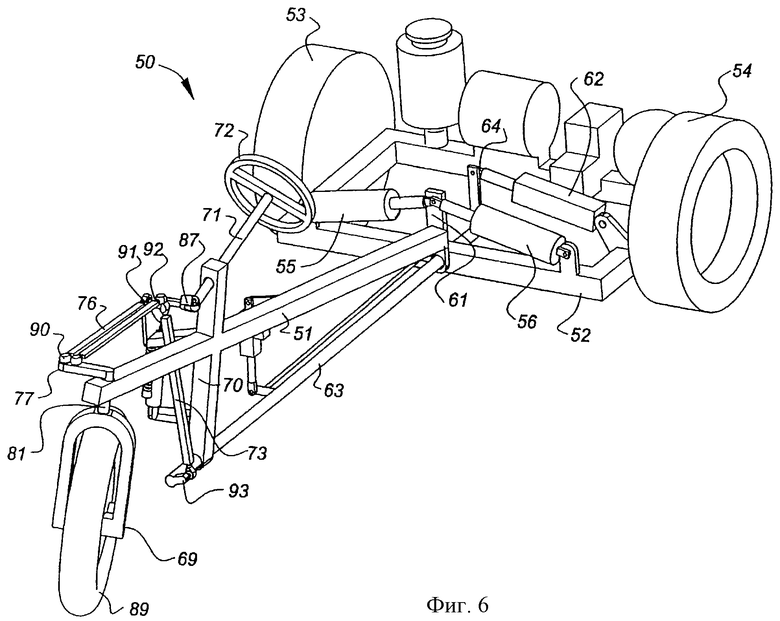
фиг. 5-7 изображают вид в перспективе средства передвижения фиг.4 в различных положениях наклона,
Фиг. 8 показывает схему гидравлического контура средства передвижения фиг.4-7.
Фиг.1 показывает средство передвижения 1 с рамой 2. Рама 2 содержит переднюю часть рамы 3 и заднюю часть рамы 4. Части рамы 3 и 4 крепятся в точке вращения 5 таким образом, что они могут поворачиваться относительно друг друга. Задняя часть рамы 4 обеспечена задней осью 6 с двумя задними колесами 7, 7'. Посредством поршневого штока цилиндры наклона 9, 9' соединены с крепежной пластиной 11 на передней части рамы 3. На втором конце цилиндры наклона 9, 9' соединены с задней частью рамы 4. Скользящий золотник 10, приводимый в действие цилиндром 12, крепится параллельно цилиндру наклона 9 между задней частью рамы 4 и передней частью рамы 3. Задняя часть рамы 4 также имеет установленные на ней приводные средства, например двигатель внутреннего сгорания или электродвигатель, для приведения в движение средства передвижения. Для ясности этот привод не показан.
Передняя часть рамы 3 несет переднее колесо 13, которое через переднюю вилку 14 и ось управления поворотом 15 переднего колеса установлено с возможностью вращения в передней опоре 16. Рулевое колесо 17 закреплено через ось рулевого управления 18 на второй опоре 19 передней части рамы 3. Через рулевое колесо 17 ось рулевого управления 18 может вращаться в подшипнике, обеспеченном второй опорой 19, независимо от переднего колеса 13. Силовое устройство, например пружина 16', работающая на кручение, соединена, с одной стороны, с осью рулевого управления 18 и, с другой стороны, с передней частью рамы 3, чтобы оказывать восстанавливающее усилие на рулевом колесе 17, которое увеличивается с увеличением углового смещения рулевого колеса 17.
Соответственно поперечные рычаги 20 и 21 закреплены на конце оси управления поворотом 15 переднего колеса и оси рулевого управления 18, причем свободные концы этих рычагов соединены с соответствующей частью датчика угла поворота 24, который в показанном примере реализации образован гидравлическим цилиндром. На фиг.1 углы поворота переднего колеса 13 и рулевого колеса 17 показаны схематичными указателями угла поворота 22 и 23, которые даны исключительно для иллюстрации и не будут присутствовать в окончательной конструкции средства передвижения согласно изобретению. Клапан 25 управления с усилителем, соответствующие концы которого закреплены на поперечных рычагах 20 и 21, установлен параллельно датчику 24 угла поворота.
Наконец передняя вилка 14 крепится через поперечный рычаг к цилиндру 26 управления с усилителем, другой конец которого закреплен на передней части рамы 3.
На передней части рамы 3 также установлено сиденье водителя и кабина водителя, которые для ясности не показаны.
Задняя часть рамы 4 также содержит масляный насос 28, аккумулятор 29 и резервуар 30 для гидравлической среды. Цилиндры наклона 9 и 9' и цилиндр 26 управления с усилителем приводятся в действие масляным насосом 28. Наконец датчик скорости 27 соединен с задней осью 6 для включения и выключения цилиндра 26 управления с усилителем как функции скорости.
В положении прямого хода вперед согласно фиг.1 угол α между осью рулевого управления 18 и осью управления поворотом 15 переднего колеса равен 0o, так что указатели угла поворота 22 и 23 параллельны один другому. Датчик 24 угла поворота и цилиндр 12 скользящего золотника 10 гидравлически связаны вместе. Движение датчика 24 обеспечивает движение рабочего цилиндра 12, в результате чего скользящий золотник 10 перемещается. В результате скользящий золотник 10 открывается, образуется перепад давлений на цилиндрах наклона 9, 9' и имеющая возможность наклона рама 3 начинает двигаться. Вследствие этого скользящий золотник 10 возвращается в свое центральное положение и, когда это положение достигается, перепад давлений между цилиндрами 9, 9' исчезает так, что движение наклона прекращается. Каждое положение датчика угла поворота 24 приводит к определенному положению цилиндра 12 и поэтому к наклону рамы 3. Незначительное вращение переднего колеса вряд ли будет замечено водителем и будет незаметно скорректировано небольшой коррекцией рулевого колеса.
Когда рулевое колесо 17 поворачивается из положения прямого хода вперед, пока указатель угла поворота 23 не окажется под углом к указателю угла поворота 22, инерция и другие динамические свойства переднего колеса 13 заставляют указатель угла поворота 22 сначала оставаться в положении прямого хода вперед. Цилиндры наклона 9, 9' приводятся в действие датчиком угла поворота 24 таким образом, что передняя часть рамы 3 наклоняется до заданной степени относительно задней части рамы 4. Когда передняя часть рамы 3 наклоняется, переднее колесо 13 будет слегка направляться внутрь в зависимости от скорости средства передвижения, пока между передним колесом 13 и рулевым колесом 17 не образуется угол α, как показано в фиг.2. Угол наклона между передней частью рамы 3 и задней частью рамы 4 будет в конце концов равен β°. На фигуре 2 α определяется схематичными указателями угла поворота 22 и 23. Таким образом, угловое смещение рулевого колеса 17 преобразуется частично в угол наклона β и частично в угол переднего колеса, при этом оба угла дают идеальное соотношение при любой скорости езды.
Величина α, измеряемая датчиком угла поворота 24, равна углу поворота оси рулевого управления 18 минус угловое смещение оси управления поворотом 15 переднего колеса. Угол α используется для контролирования угла наклона β средства передвижения в соответствии с зависимостью β = f(a). Угол наклона β полностью определяется измерением α рулевого колеса. Как перемещение рулевого колеса 17 относительно переднего колеса 13 (степень в градусах измерения α рулевого колеса), так и преобразование измерения α рулевого колеса в угол наклона β могут быть выбраны таким образом, что достигается оптимальная езда. Для примера можно выбрать β = c•α, где с является постоянной величиной (константой).
Фиг.3 схематично показывает гидравлическую систему средства передвижения 1 согласно настоящему изобретению. На фиг.3 передняя часть рамы 3 и задняя часть рамы 4 показаны прямоугольниками, обозначенными пунктирной линией. Кроме того, на фиг.3 те же цифровые позиции обозначают те же компоненты, что и на фиг.1 и 2. Как видно из фиг.3, масляный насос 28 работает от двигателя 31 средства передвижения 1. В этом случае двигателем 31 может быть электродвигатель или двигатель внутреннего сгорания. Однако приводить в действие масляный насос 28 можно с помощью отдельного мотора, установленного в передней части рамы 3.
Аккумулятор 29 расположен с напорной стороны масляного насоса 28. Через скользящий золотник 10 (4/3) цилиндры 9, 9' наклона могут быть соединены с помощью их соответствующих магистралей 32, 33 с магистралью 34 высокого давления, которая обобщается с аккумулятором 29, или с обратной магистралью 35, которая выходит в резервуар 30. Скользящий золотник 10 приводится в действие цилиндром 12, который через магистрали 36 и 37 связан с датчиком угла поворота 24. Цилиндр 24 соединен, с одной стороны, с поперечным рычагом 20 оси управления поворотом 15 переднего колеса, в то время как поршневой шток цилиндра 24 соединен с поперечным рычагом 21 оси рулевого управления 18. Поршень цилиндра 24 перемещается как функция (в зависимости от) относительного углового смещения α между осью рулевого управления 18 и осью управления поворотом 15 переднего колеса. Это перемещение продолжает цилиндр 12. В показанном прямом положении хода вперед, в котором угол α равен 0o, оба цилиндра наклона 9, 9' соединены с магистралью высокого давления 34 так, что передняя часть рамы 3 стоит прямо. Если рулевое колесо поворачивается против часовой стрелки (если смотреть из положения водителя), поршень будет двигаться влево внутри цилиндра 24. В результате поршень в цилиндре 12 толкается к золотнику 10 и правый цилиндр наклона 9' соединяется с магистралью 34 высокого давления. Левый цилиндр наклона 9 соединяется с обратной магистралью 35. Золотник 10 и цилиндр 12 соединены, с одной стороны, с задней частью рамы 4, как схематично показано пунктирной линией 38, и, с другой стороны, соединены с передней частью рамы 3, что схематично показано пунктирной линией 39. В результате при наклоне влево цилиндр 12 отходит от золотника 10 до тех пор, пока золотник 10 не займет центральное положение, в результате чего движение связанных вместе поршневых штоков цилиндров наклона 9, 9' прекращается.
Фиг.3 также показывает управление с усилителем, зависящее от скорости, с помощью цилиндра 26 управления с усилителем, который через клапан 25 управления с усилителем (4/3) соединен с клапаном 40 переключения. Клапан переключения 40 приводится в действие датчиком скорости 27, например, в виде шестеренчатого насоса. В показанном случае скорость средства передвижения 1 недостаточна для того, чтобы насос 27 перемещал клапан 40 против усилия пружины. При низкой скорости клапан 40 переключается в такое положение, что магистраль 41 клапана 25 соединяется с магистралью 34 высокого давления. Магистраль 42 всегда соединена с обратной магистралью 35. Когда рулевое колесо поворачивается, тот факт, что клапан 25 открывается, означает, что на поршне цилиндра 26 будет создаваться перепад давлений, так что переднее колесо 13 вращается. В случае увеличения скорости средства передвижения давление в магистрали 43 переключения будет увеличиваться до степени, достаточной для переключения положения клапана 40, в результате чего обе магистрали 41 и 42 соединяются с обратной магистралью 35. Управление с усилителем может отключаться плавно не резким переключением магистрали 41 от магистрали высокого давления в обратную магистраль, а давая возможность давлению постепенно падать (например, с помощью клапана давления, который приводится в действие датчиком скорости). Таким образом, цилиндр 26 управления с усилителем отключается. При включении управления с усилителем при низких скоростях, если рулевое колесо 17 поворачивается, переднее колесо 13 будет следовать за движениями рулевого колеса, так что угол α остается по существу равным 0o. Это предотвращает наклон средства передвижения. Определенное свободное перемещение α, например ±1o, возможно.
Несмотря на то, что в примерах реализации изобретения, описанных выше, датчик 24 имеет гидравлическую конструкцию, изобретение не ограничено этим устройством, и также возможно использовать оптические, электрические или механические датчики для приведения в действие цилиндров наклона. В принципе также возможно заменить гидравлику цилиндров наклона любой другой системой, например электрической системой. Кроме того, изобретение не ограничено средствами передвижения, которые имеют переднюю наклоняющуюся часть с одним колесом и заднюю неподвижную часть с двумя колесами, но возможно, чтобы передняя часть рамы содержала два колеса и имела ненаклоняющуюся конструкцию, в то время как задняя часть рамы способна наклоняться и содержит одно колесо. В этом случае термин "переднее колесо" и "ось управления поворотом переднего колеса" также включает конструкции, в которых эти компоненты, если необходимо, располагаются в задней части относительно направления движения средства передвижения. "Переднее колесо" поэтому означает управляемое колесо средства передвижения и "ось управления поворотом переднего колеса" означает ось, вокруг которой может наклоняться управляемое колесо. Кроме того, можно использовать четырехколесную раму, как описано в патентной заявке Голландии 1005894 на имя настоящего заявителя.
В альтернативных примерах реализации изобретения возможно, чтобы угол поворота α между осью рулевого управления 18 и осью управления поворотом 15 переднего колеса передавался на скользящий золотник двумя тяговыми тросами или тросом управления, осуществляемого нажимом и вытягиванием, вместо передачи через гидравлический датчик 24 угла поворота, магистрали 36 и 37 и рабочий цилиндр 12 скользящего золотника 10. Угловое смещение между осью рулевого управления 18 и осью управления поворотом 15 переднего колеса также может измеряться системой планетарной передачи, при этом к примеру солнечная шестерня планетарной передачи соединяется с осью рулевого управления 18, а планетарная шестерня соединяется с осью управления поворотом 15 переднего колеса, причем вращение (поворот) планетарной шестерни обеспечивает требующийся угол наклона. Связь вращения планетарной передачи с цилиндрами наклона может выполняться различными технологическими принципами.
В примере реализации изобретения, детально показанном на фиг.4, различие углов поворота переднего колеса 89 вокруг оси управления поворотом 81 переднего колеса и поворота рулевого колеса 72 вокруг оси рулевого управления 71 определяется с помощью набора штанг, который механически связан со скользящим золотником 62 через вращающийся вал 63 и фланец 64. Средство передвижения 50 с изменяемым углом наклона согласно фиг.4 содержит переднюю часть рамы 51, которая соединена с задней частью рамы 52 с возможностью наклона. Задняя часть рамы 52 обеспечена двумя задними колесами 53 и 54 и содержит два цилиндра 55, 56. Цилиндры наклона 55, 56 с одной стороны соединены посредством их цилиндрического корпуса с частью рамы 52 и посредством их поршневых штоков 59, 60 соединены с крепежной пластиной 61 на передней части рамы 51. Вращающийся вал 63 расположен с возможностью поворота так, что он доходит до задней части рамы 52, и в месте, где находится эта задняя часть рамы 52, соединяется со скользящим золотником 62 посредством фланца 64. На другом конце скользящий золотник 62 соединен с задней частью рамы 52. Кроме того, задняя часть рамы 52 содержит двигатель (не показан), а также аварийный аккумулятор 65, топливный насос аккумулятора 66, датчик объема 66' (не показан), масляный насос с встроенным устройством 67 регулирования объема и резервуар 68 системы непрерывной циркуляции. Цилиндры 55 и 56 каждый обеспечены соответственно клапаном амортизатора/ограничителя 57, 58.
В переднем конце передней части рамы 51 передняя вилка 69 подвешена так, что она может поворачиваться вокруг оси управления поворотом 81 переднего колеса через трансмиссию 80.
Через ось рулевого управления 71 рулевое колесо 72 установлено с возможностью вращения в верхней части передней опоры 70. Нижняя часть опоры 70 содержит подшипник, в котором установлен передний конец 74 вращающегося вала 63. Через поворотный кронштейн 87 ось рулевого управления 71 соединена с горизонтальным рычагом 76, который входит в шарнирное зацепление на поперечном рычаге 77 переднего колеса 89. Поворотный кронштейн 87 соединен посредством шарового шарнира с вертикальным рычагом 73, который через шаровой шарнир соединен с передним концом 74 вращающегося вала 63. С помощью поворотного кронштейна 87, горизонтального рычага 76 и вертикального рычага 73 различие углов поворота оси рулевого управления 71 и переднего колеса 89 вокруг оси управления поворотом 81 переднего колеса преобразуется в поворот вала 63 вокруг его продольного направления. Через фланец 64 этот поворот передается на скользящий золотник 62, который приводит в действие цилиндры наклона 55, 56, чтобы наклонить переднюю часть рамы 51 как функцию различия углов поворота, определяемого штангами 87, 73 и 76.
Кроме того, средство передвижения 51 содержит цилиндр 82 управления с усилителем, который с одной стороны соединен с передней опорой 70 и с другой стороны входит в зацепление с пластиной наклона 84. Через управление с усилителем 75 параллельно горизонтальному рычагу 76 датчика угла поворота, когда цилиндр управления с усилителем приводится в действие, поперечный рычаг 77 отходит от переднего колеса 89. Цилиндр 82 управления с усилителем приводится в действие клапаном 85 управления с усилителем, который соединен, с одной стороны, с передней частью рамы 51 и, с другой стороны, с вращающимся валом 63. Для ясности система гидравлических магистралей между клапаном 85 управления с усилителем и цилиндром 82 управления с усилителем пропущена на фиг. 4. Кроме того, обеспечен перепускной клапан 86, который приводится в действие датчиком скорости средства передвижения, так что при низких скоростях клапан 85 управления с усилителем приводит в действие цилиндр 82 управления с усилителем, а при высоких скоростях давление не может повышаться на цилиндре посредством клапана 85. Наконец обеспечен торсион 88, который в зависимости от положения наклона оказывает усилие на вращающийся вал 63, что обеспечивает при увеличении наклонного положения средства передвижения необходимое увеличение усилия управления на рулевом колесе 72. Когда рулевое колесо 72 освобождается, торсион 88 обеспечивает обратное движение передней части рамы 51 в прямое положение.
Фиг.5 показывает средство передвижения 51 с изменяемым углом наклона согласно фиг. 1 в прямом положении, и на этой фигуре положение вертикального рычага 73, горизонтального рычага 76 и поворотного кронштейна 86, соединенного с осью рулевого управления 71, можно видеть более ясно. Как очевидно, вертикальный рычаг 73 соединен шаровыми шарнирами 92 и 93, с одной стороны, с поворотным кронштейном 87, и, с другой стороны, с вращающимся валом 63. Через шаровой шарнир 91 горизонтальный рычаг 76 связан с поворотным кронштейном 87 и посредством шарового шарнира 90 соединен с поперечным рычагом 77. Как ясно из фиг.6, когда рулевое колесо поворачивается влево, либо горизонтальный рычаг 76 может переместиться вперед, либо вертикальный рычаг 73 сможет переместиться вверх или возможна комбинация этих двух движений. В результате перемещения вперед горизонтального рычага 76 переднее колесо повернется влево. Перемещение вертикального рычага 73 вверх придает вращение вращающемуся валу 63 через шаровой шарнир 93, вследствие чего вращающийся вал приводит в действие скользящий золотник 62 через фланец 64. В результате поршневой шток 60 уходит в корпус цилиндра наклона 56, а поршневой шток 59 выталкивается из цилиндра наклона 55 так, что передняя часть рамы 51 наклоняется через крепежную пластину 61 в положение, которое показано в фиг.7.
Вращающийся вал 63 показан как продолжение скользящего золотника 62 в направлении передней части средства передвижения с изменяемым углом наклона. Так как этот скользящий золотник 62 имеет очень короткий рабочий ход, вращающийся вал 63 также может считаться как продолжение задней части рамы 52. Поворот вращающегося вала 63 относительно передней части рамы 51, следовательно, равен углу наклона β между передней частью рамы 51 и задней частью рамы 52. Через связь, образованную вертикальным рычагом 73 и поворотным кронштейном 87, поворот оси рулевого управления 71 через горизонтальный рычаг 76 преобразуется либо во вращение оси управления поворотом 81 переднего колеса через горизонтальный рычаг 76, либо в поворот вращающегося вала 63 через вертикальный рычаг 73, либо в комбинацию этих двух поворотов. Сочетание поворота переднего колеса 89 вокруг оси управления поворотом 81 переднего колеса и наклона передней части рамы 51 будет регулироваться самим средством передвижения как функция (в зависимости от) скорости езды и радиуса поворота.
Фиг. 8 показывает схему гидравлического контура для управления наклоном средства передвижения 50 с изменяемым углом наклона согласно фиг.4-7. Система согласно фиг.8 является гидравлической системой циркуляции с постоянным расходом в отличие от системы постоянного давления, которая показана в фиг. 3. Масляный насос 67 снабжен объединенным с ним регулятором постоянного объема (расхода) и при высоких скоростях качает постоянный объем через контур 130, который включает скользящий золотник 62, перепускной клапан 86 и резервуар 68, и при низких скоростях качает постоянный объем через контур, образованный скользящим золотником 62, клапаном 85 управления с усилителем и резервуаром 68.
Через магистраль 100 высокого давления масляный насос 67 соединен с подводящим впускным отверстием 101 скользящего золотника 62. Впускное отверстие 102 цилиндра скользящего золотника 62 соединено через амортизатор 57 и выходную магистраль 103 с цилиндром наклона 55. Обратное впускное отверстие 109 клапана 62 соединено через амортизатор 58 и обратную магистраль 108 с цилиндром наклона 56. Обратное впускное отверстие 110 клапана 62 соединено через магистраль 111 как с входом перепускного клапана 86, так и с впускным отверстием 125 клапана 85 управления с усилителем. Выходная магистраль из перепускного клапана 86 и обратное выпускное отверстие 128 клапана 85 управления с усилителем соединены через магистраль 113 и датчик объема 66' с резервуаром 68, который расположен на стороне низкого давления насоса 67.
Датчик скорости 112, который может иметь конструкцию масляного насоса, вырабатывает сигнал электрического управления, который передается на перепускной клапан 86 таким образом, что при высоких скоростях средства передвижения этот перепускной клапан переключается и соединяет магистраль 111 с магистралью 113 таким образом, что на клапане 85 управления с усилителем не сможет повышаться давление, и управление с усилителем отключается.
Механические соединения между скользящим золотником 62 и цилиндрами наклона 55, 56 и механическое соединение между поршнями 59, 60 и задней частью рамы обозначены пунктирными линиями. То же относится к механическому соединению между цилиндром 82 управления с усилителем и клапаном 85 управления с усилителем и передней частью рамы.
Если клапан 62 находится в центральном положении, рабочая жидкость гидросистемы течет непосредственно из подводящего впускного отверстия 101 в обратное впускное отверстие 110. Если при высоких скоростях средства передвижения, когда магистраль 111 и магистраль 113 соединены, скользящий золотник 62 приводится в действие через вращающийся вал 63 вращением рулевого колеса 72, в случае поворота рулевого колеса влево (если смотреть из положения водителя) выходная магистраль 103 цилиндра наклона 55 будет больше соединяться с магистралью 111 низкого давления, в то время как обратная магистраль 108 цилиндра наклона 56 будет больше соединяться с магистралью 100 высокого давления. В результате поршневой шток 59 будет выталкиваться из корпуса цилиндра наклона 55, в то время как поршневой шток 60 будет вдвигаться в корпус цилиндра наклона 56. В результате передняя часть рамы 51 средства передвижения с изменяемым углом наклона наклоняется влево.
Через магистрали обратной подачи 114 и 115 выходная магистраль 103 и обратная магистраль 108 соединяются с соответствующими сторонами скользящего золотника 62. В результате на поверхностях в клапане развивается усилие, которое действует в направлении, противоположном усилию управления, и имеет с ним обратную связь. Таким образом, если необходимо получить большее давление, к скользящему золотнику 62 должно быть приложено большее усилие. Вследствие обратного момента (контрмомента), прилагаемого таким образом к вращающемуся валу 63, усилие, которое является мерой ускорения наклона, воспринимаемого водителем, передается лицу, управляющему рулевым колесом 72. Результатом является удобное ощущение управления. Клапаны ограничителя 57, 58 амортизируют введение в действие цилиндров наклона 55, 56 таким образом, что обратная связь подводящего выпускного отверстия 102 и обратного впускного отверстия 109 через магистрали обратной подачи 114, 115 вырабатывает контрусилие на вращающемся валу 63, которое является мерой скорости наклона, которая воспринимается водителем на рулевом колесе 72. Скользящий золотник 62 может быть заменен поворотным клапаном, причем в этом случае обратная связь осуществляется гидравлическим двигателем.
Если скорость средства передвижения уменьшается, перепускной клапан 86 через датчик 112 перемещается в положение, показанное в фиг.8, так что на перепускном клапане 86 создается перепад давлений. Вследствие этого через клапан 85 управления с усилителем должны проходить большие количества масла, в результате чего, если клапан 85 приводится в действие, в цилиндре 82 управления с усилителем повышается давление. Так же, как и скользящий золотник 62, клапан 85 управления с усилителем обеспечен подводящим впускным отверстием 125, выпускным отверстием 126, обратным впускным отверстием 127 и обратным выпускным отверстием 128, а также магистралью обратной подачи 116. Так как наклон передней части рамы регулируется через вращающийся вал 63 и скользящий золотник 62, на основании различия в повороте оси рулевого управления 71 и поворота переднего колеса 89 вокруг оси управления поворотом 81 переднего колеса, когда цилиндр 82 управления с усилителем находится полностью в рабочем состоянии, наклон средства передвижения будет отключен. Вследствие приведения в действие цилиндра 82 управления с усилителем переднее колесо 89 поворачивается вокруг оси управления поворотом 81 переднего колеса (например, до степени, эквивалентной угловому смещению оси рулевого управления 71), и усилие управления не заставит поворачиваться вращающийся вал 63. В результате средство передвижения остается в прямом положении при низких скоростях.
Другой возможностью блокировки наклона средства передвижения при низких скоростях является установка с помощью магистрали обратной подачи 116 клапана 85 управления с усилителем как можно ближе к центральному положению, чтобы клапан не смог перемещаться от поворота рулевого колеса, и в таком случае переднее колесо 89 может поворачиваться вокруг оси управления поворотом 81 переднего колеса, не вызывая наклона средства передвижения. Эта обратная связь в клапане 85 управления с усилителем дает преимущество в том, что водитель чувствует некоторые усилия, воздействующие на ось управления поворотом 81 переднего колеса. На фиг.8 есть определенная степень обратной связи на клапане 85 управления с усилителем, поэтому с уменьшением скорости средства передвижения увеличивается блокировка поворота вращающегося вала 63 с помощью клапана 85 управления с усилителем и жесткость прямого положения возрастает.
Как показано на фиг. 8, каждый цилиндр 55, 56 содержит помимо поршней 131, 132 аварийный поршень 120, 121, способный перемещаться отдельно от поршней 131, 132. В случае выхода из строя гидравлической системы, например в случае поломки масляного насоса 67, датчик объема 66' определяет падение объема и аварийные поршни 120, 121 подсоединяются через аварийную магистраль 124 к аварийному аккумулятору 65, который удерживается под давлением через клапан 66 насоса. В результате аварийные поршни 120, 121 упираются в соответствующие внутренние упоры 122, 123 в положение, которое показано в фиг.8, так что передняя наклоняющаяся часть рамы 51 устанавливается в прямое положение.
Другой возможностью аварийной системы для установки средства передвижения в прямое положение в случае отказа гидравлической системы является, например, установка пружинного элемента параллельно цилиндрам наклона 55, 56, причем наклону противодействует усилие пружины. Если гидравлическое усилие наклона отсутствует, усилие пружины будет перемещать средство передвижения в прямое положение.
Для гидравлической системы, которая действует при постоянном давлении, как показано на фиг.3, давление может измеряться датчиком, и в случае определенного падения давления могут использоваться аварийные поршни подобные тем, что показаны на фиг.8.
Для улучшения ощущения управления выше уже было описано, что обратная подача давления на скользящий золотник 62 через магистрали обратной подачи 114, 115 приводит к тому, что водитель, управляющий средством передвижения, чувствует усилие на рулевом колесе 72, которое является мерой ускорения наклона. Прикладывая обычное амортизирующее воздействие через клапаны ограничителя 57, 58, усилие, которое чувствуется на рулевом колесе 72, преобразуется в меру скорости наклона передней части рамы 51.
Под воздействием торсиона 88, как показано на фиг.4, когда наклон увеличивается, усилие, оказываемое на рулевое колесо 72 для наклона средства передвижения, увеличивается, а когда рулевое колесо 72 освобождается, средство передвижения возвращается в прямое положение.
Трансмиссии 78, 80, 79 повышения или понижения скорости могут быть расположены в оси рулевого управления 71, в оси управления поворотом 81 переднего колеса и в подшипнике вращающегося вала 63 для изменения ощущения управления. Вместе с выбором длины рычагов 73, 76 и поворотного кронштейна 87 можно регулировать взаимоотношение между углом управления, поворотом переднего колеса 89 вокруг оси управления поворотом 81 переднего колеса и углом наклона.
Если подвеска переднего колеса 89 устанавливается с большим углом вильчатой головки (ось 81 наклона образует угол к вертикали), геометрические свойства подразумевают, что при низких скоростях угол наклона передней части рамы 51 не оптимален. Это явление можно устранить, создав противоположный поворотный момент, когда переднее колесо поворачивается вокруг оси управления поворотом 81 переднего колеса с помощью силового элемента, которым к примеру может служить пружина 83, работающая на растяжение/кручение, установленная между передней частью рамы 51 и осью управления поворотом 81 переднего колеса.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАКЛОНЯЮЩЕЕСЯ ТРАНСПОРТНОЕ СРЕДСТВО | 1998 |
|
RU2225310C2 |
| САМОСТАБИЛИЗИРУЮЩЕЕСЯ, УПРАВЛЯЕМОЕ ПО НАПРАВЛЕНИЮ ТРАНСПОРТНОЕ СРЕДСТВО С ПО МЕНЬШЕЙ МЕРЕ ТРЕМЯ КОЛЕСАМИ | 1995 |
|
RU2156201C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ИЗМЕНЯЕМЫМ УГЛОМ НАКЛОНА, ВЫПОЛНЕННОЕ С УПРАВЛЯЕМЫМИ ЗАДНИМИ КОЛЕСАМИ | 2001 |
|
RU2257306C2 |
| МАЛОГАБАРИТНЫЙ ЭЛЕКТРОПОГРУЗЧИК | 2012 |
|
RU2539442C2 |
| КОЛЕСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2407668C2 |
| Транспортное средство Исина | 1985 |
|
SU1294646A1 |
| РУЛЕВАЯ СИСТЕМА АГРОМОБИЛЬНОГО АГРЕГАТА | 2015 |
|
RU2582738C2 |
| САМОХОДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2651528C1 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| МЕХАНИЗМ ПОДНЯТИЯ И ОПУСКАНИЯ ЗАПАСНОГО КОЛЕСА МЕЖДУГОРОДНОГО АВТОБУСА | 2013 |
|
RU2528459C2 |


Изобретение касается средства передвижения 1, обеспеченного рамой 2, имеющей переднюю часть 3 и заднюю часть 4, которые могут наклоняться относительно друг друга. Средство передвижения 1 содержит три или более колес 7, 7', 13, причем обеспечена возможность поворота переднего колеса 13 относительно рулевой колонки 18. В этом случае датчик 24 определяет угол поворота между передним колесом 13 и рулевой колонкой 18 и в зависимости от этого угла поворота приводит в действие средства изменения угла наклона 9, 9' средства передвижения. В результате последующего наклона передней части рамы 3 и, как следствие скорости, с которой едет средство передвижения 1, переднее колесо 13 и угол наклона будут автоматически устанавливать правильный уровень, позволяющий средству передвижения 1 проходить поворот, сохраняя устойчивость при данной скорости. Техническим результатом является возможность простого и надежного контроля управления наклоном посредством различия в угловом повороте между рулевой колонкой 18, которая гибко соединена с передним колесом, и передним колесом 13. 22 з.п. ф-лы, 8 ил.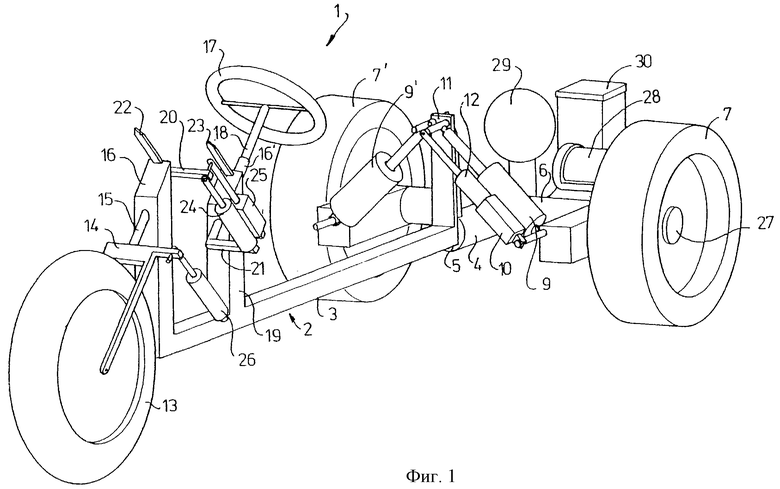
| Приспособление для включения работомера при нагрузке трактора, превышающей нагрузку холостого хода | 1930 |
|
SU20835A1 |
| Устройство для магнитной записи | 1974 |
|
SU592377A3 |
| СПОСОБ ПРИЕМА МНОГОЛУЧЕВЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2120180C1 |
| Кран-дозатор для хроматографа | 1983 |
|
SU1158922A2 |

