Изобретение относится к устройствам контроля геометрических параметров формы и дефектоскопии поверхностей, например, промышленного проката, труб.
Известно устройство для измерения профиля деталей (А.с. СССР N 1755049 от 05.12.89, МКИ 5 G 01 В 21/02), содержащее оптическую систему, телекамеру на основе ПЗС-матрицы, блок вычисления и управления (компьютер), формирователь данных. Формирователь включен между камерой и блоком вычисления и управления и совмещает функции устройства видеоввода и специализированного процессора, осуществляющего аппаратную бинаризацию видеоизображения. Последнее способствует увеличению производительности процесса измерений.
Устройство обеспечивает определение лишь двумерных координат плоского контура детали и не пригодно для восстановления ее объемной формы или аномалий отражательной способности и обнаружения дефектов на поверхности.
Наиболее близким устройством того же назначения к заявляемому устройству по совокупности признаков является оптико-телевизионное устройство контроля поверхности трубы (А. с. СССР N 1775603 от 13.12.90, МКИ 5 G 01 В 21/24). Устройство содержит две системы технического зрения, включающие телевизионные камеры. Последние подключены ко входам компаратора. Оси телерегистрации систем технического зрения лежат в одной плоскости и разнесены по ходу вращения трубы на 90o. В состав устройства входит блок управления и механизм регулировки скорости перемещения трубы.
Компараторная система осуществляет сравнение видеоизображений двух разнесенных по азимутальному углу секторов боковой поверхности трубы и позволяет выделять и оконтуривать поверхностные дефекты на основе разностного корреляционного алгоритма. При этом невозможна оценка размеров дефектов в направлении регистрации (т.е. глубины впадин или высоты выпучин) или аномалий отражательной способности поверхности и идентификация на этой основе дефектов включения. К недостаткам устройства следует отнести усложненную кинематическую схему (осевая подача, совмещенная с вращением), а также возможность сбоя при оконтуривании дефектов, находящихся в одном радиальном сечении трубы.
Целью предлагаемого изобретения является расширение функциональных возможностей, выражающееся в обеспечении возможности контроля рельефа и отражательной способности поверхности, включая способность к выявлению и измерению глубины и высоты поверхностных дефектов, в том числе аномально отражающих поверхностных включений.
Указанный технический результат при осуществлении заявляемого изобретения достигается тем, что заявляемое оптико-телевизионное устройство контроля поверхности протяженных объектов с постоянным сечением содержит систему сканирования контролируемой поверхности, блок управления и систему технического зрения, включающую телекамеру и устройство оптического сопряжения ее с контролируемой поверхностью. Особенность заключается в том, что система сканирования поверхности контролируемого объекта выполнена в виде механизма взаимного линейного смещения поверхности и системы технического зрения, при этом последняя содержит телекамеру на основе ПЗС-матрицы и m различающихся по направлениям освещения контролируемой поверхности импульсных осветительных систем с блоком их управления и синхронизации с телекамерой. При этом устройство оптического сопряжения выполнено многоракурсным и его одноракурсные каналы содержат оптические диафрагмирующие и поворотные элементы, обеспечивающие оптическое выделение и оптическое сопряжение отдельных участков боковой поверхности контролируемого объекта с соответствующими участками ПЗС-матрицы телекамеры, и каждая из m осветительных систем содержит каналы для освещения оптически выделенных участков боковой поверхности. Дополнительно введены подключенные к выходу телекамеры последовательно соединенные устройство видеоввода и блок вычисления и управления, соединенный с блоком управления осветительными системами. При этом в зависимости от наличия или отсутствия априорной детерминированности отражательной способности контролируемой поверхности число m больше или равно соответственно двум или трем.
При контроле цилиндрического объекта оптико-телевизионное устройство отличается тем, что система оптического сопряжения содержит четыре одноракурсных канала, оптические оси которых лежат в плоскости, перпендикулярной оси поперечного кругового сечения контролируемого объекта, и исходят в отстоящих друг от друга на 90 градусов радиальных направлениях из центров секторов боковой поверхности объекта, оптически выделенных и оптически сопряженных с соответствующими четвертями ПЗС-матрицы с помощью установленных в этих каналах оптических диафрагмирующих и поворотных элементов, а каждая из m осветительных систем содержит четыре канала для освещения оптически выделенных секторов поверхности объекта в направлении оптических осей, лежащих в плоскостях, проходящих через ось контролируемого объекта.
Дополнительно, с целью выравнивания светимости поверхности в направлении приемной апертуры телекамеры при контроле цилиндрического объекта оптико-телевизионное устройство отличается тем, что каждый из каналов освещения выделенного сектора контролируемой поверхности состоит из двух или более ветвей раздельного освещения его участков, разделенных плоскостями, проходящими через ось контролируемого объекта.
Кроме этого, оптико-телевизионное устройство отличается тем, что с целью сокращения объема вычислений при восстановлении формы контролируемой поверхности и необходимого для этого объема компьютерной памяти выходные оптические системы осветительных систем выполнены в виде коллиматоров.
На чертеже изображена схема оптико-телевизионного устройства.
В общем случае оптико-телевизионное устройство состоит из последовательно связанных системы технического зрения 1, устройства видеоввода 2 и блока вычисления и управления (компьютера) 3, а также системы сканирования контролируемой поверхности 4. Последняя выполнена в виде механизма взаимного линейного смещения поверхности и системы технического зрения. При этом система технического зрения содержит телекамеру 5, выполненную на основе ПЗС-матрицы, устройство оптического сопряжения 6 приемной апертуры ПЗС-матрицы с контролируемой поверхностью 7 и m импульсных осветительных систем  c блоком их управления и синхронизации 9, связанным с компьютером. Осветительные системы различаются по направлениям освещения контролируемой поверхности.
c блоком их управления и синхронизации 9, связанным с компьютером. Осветительные системы различаются по направлениям освещения контролируемой поверхности.
Устройство оптического сопряжения 6 выполнено многоракурсным. При этом составляющие ее одноракурсные каналы содержат оптические диафрагмирующие и поворотные элементы, обеспечивающие оптическое выделение и оптическое сопряжение отдельных участков боковой поверхности контролируемого объекта с соответствующими участками ПЗС-матрицы телекамеры, и каждая из m осветительных систем содержит каналы для освещения оптически выделенных участков боковой поверхности.
В зависимости от наличия или отсутствия априорной детерминированности отражательной способности этой поверхности число m больше или равно соответственно 2 или 3.
В случае контроля цилиндрического объекта (трубы) устройство оптического сопряжения 6 содержит четыре одноракурсных канала  оптические оси которых лежат в плоскости, перпендикулярной оси объекта, исходят в отстоящих друг от друга на 90 градусов радиальных направлениях из центров секторов
оптические оси которых лежат в плоскости, перпендикулярной оси объекта, исходят в отстоящих друг от друга на 90 градусов радиальных направлениях из центров секторов  боковой поверхности объекта (трубы), оптически выделенных и оптически сопряженных с соответствующими четвертями ПЗС-матрицы с помощью установленных в этих каналах оптических диафрагмирующих и поворотных элементов. В этом случае каждая из m осветительных систем
боковой поверхности объекта (трубы), оптически выделенных и оптически сопряженных с соответствующими четвертями ПЗС-матрицы с помощью установленных в этих каналах оптических диафрагмирующих и поворотных элементов. В этом случае каждая из m осветительных систем  содержит четыре канала
содержит четыре канала  для освещения оптически выделенных секторов поверхности объекта в направлении оптических осей, лежащих в плоскостях, проходящих через ось контролируемого объекта.
для освещения оптически выделенных секторов поверхности объекта в направлении оптических осей, лежащих в плоскостях, проходящих через ось контролируемого объекта.
Кроме того, с целью выравнивания светимости поверхности в направлении приемной апертуры телекамеры при контроле цилиндрического каждый из этих каналов освещения состоит из K ветвей  для раздельного освещения участков
для раздельного освещения участков  соответствующего сектора
соответствующего сектора  разделенных плоскостями, проходящими через ось контролируемого объекта. Необходимость в таком разделении возрастает с увеличением чистоты обработки поверхности детали и, соответственно, с уменьшением диффузной компоненты отражения освещающего излучения.
разделенных плоскостями, проходящими через ось контролируемого объекта. Необходимость в таком разделении возрастает с увеличением чистоты обработки поверхности детали и, соответственно, с уменьшением диффузной компоненты отражения освещающего излучения.
Кроме того, в интересах сокращения объема вычислений при восстановлении формы контролируемой поверхности и необходимого для этого объема компьютерной памяти оптические системы осветителей могут быть выполнены в виде коллиматоров, обеспечивающих получение плоских волновых фронтов освещающих пучков.
Устройство работает следующим образом. При включенной телекамере компьютер 3 выдает команду включения освещения блоку управления и синхронизации осветительных систем 9, подготавливая последний к работе синхронно с телекамерой 5. Синхросигнал с выхода камеры с частотой телерегистрации поступает на вход блока управления и синхронизации 9. Последний, срабатывая, запускает с частотой, в m раз меньшей частоты телерегистрации, последовательно каждую из m осветительных систем  . При этом контролируемая поверхность в каждый из m следующих друг за другом циклов телерегистрации освещается импульсными пучками, генерируемыми соответствующими осветительными системами и различающимися по направлениям их падения на поверхность. Устройство оптического сопряжения 6 формирует на приемной апертуре ПЗС-матрицы изображение контролируемой поверхности 7. При этом каждый выделенный устройством участок поверхности освещается соответствующими каналами осветительных систем. В частности, в варианте устройства для контроля цилиндрических объектов каждый выделенный системой оптического сопряжения сектор
. При этом контролируемая поверхность в каждый из m следующих друг за другом циклов телерегистрации освещается импульсными пучками, генерируемыми соответствующими осветительными системами и различающимися по направлениям их падения на поверхность. Устройство оптического сопряжения 6 формирует на приемной апертуре ПЗС-матрицы изображение контролируемой поверхности 7. При этом каждый выделенный устройством участок поверхности освещается соответствующими каналами осветительных систем. В частности, в варианте устройства для контроля цилиндрических объектов каждый выделенный системой оптического сопряжения сектор  отображается в соответствующем квадранте ПЗС-матрицы и каждый из K его участков
отображается в соответствующем квадранте ПЗС-матрицы и каждый из K его участков  освещается набором разнесенных по направлению и времени генерации импульсных оптических волн. Телекамера совместно с устройством видеоввода производит дискретизацию и оцифровку оптического изображения, формируя матрицу полутонового изображения
освещается набором разнесенных по направлению и времени генерации импульсных оптических волн. Телекамера совместно с устройством видеоввода производит дискретизацию и оцифровку оптического изображения, формируя матрицу полутонового изображения 
Далее с использованием априорно заданных в пространстве градиентов  карт отражательной способности эталонных поверхностей каждого независимо освещаемого участка поверхности
карт отражательной способности эталонных поверхностей каждого независимо освещаемого участка поверхности  множество эталонных поверхностей, αjik - угол, определяющий направления освещения K-ого участка i-го сектора) при условии, что контролируемая поверхность принадлежит указанному множеству {ε}, выполняется с использованием стерефотометрического алгорима восстановление матрицы градиентов поверхности (p(xs, yt), q(xs, yt)) и определение значения индекса ε, т.е. идентификация вида поверхности (обнаружение дефекта включения). После этого производится восстановление формы поверхности детали интегрированием матрицы градиентов с использованием априорно заданных граничных условий.
множество эталонных поверхностей, αjik - угол, определяющий направления освещения K-ого участка i-го сектора) при условии, что контролируемая поверхность принадлежит указанному множеству {ε}, выполняется с использованием стерефотометрического алгорима восстановление матрицы градиентов поверхности (p(xs, yt), q(xs, yt)) и определение значения индекса ε, т.е. идентификация вида поверхности (обнаружение дефекта включения). После этого производится восстановление формы поверхности детали интегрированием матрицы градиентов с использованием априорно заданных граничных условий.
В случае выполнения оптических систем осветителей в виде коллиматоров углы αjiu являются константами и для восстановления градиентов используется одинаковая для любого пикселя рабочего поля (xs, yt) карта отражательной способности, что равнозначно значительному сокращению необходимой компьютерной памяти для хранения матриц карт отражательной способности и сокращению объема вычислений.
Таким образом, восстановленная за m циклов телерегистрации форма поверхности детали в пределах рабочего поля телекамеры или кадра и его продольная координата, получаемая из смещения, составляют необходимый набор информации для восстановления формы всей поверхности объекта и оконтуривания участков поверхностности, различающейся по отражательной способности.
В настоящее время реализующий заявляемое техническое решение стереофотометрический дефектоскоп прошел стадии разработки и изготовления опытного образца и подготавливается к использованию для контроля поверхности металлических труб в АО "Чепецкий механический завод".
Изобретение относится к устройствам контроля геометрических параметров формы и дефектоскопии поверхностей, например, промышленного проката, труб. Устройство содержит систему технического зрения, включающую телекамеру на основе ПЗС-матрицы и m различающихся по направлениям освещения контролируемой поверхности импульсных осветительных систем с блоком их управления и синхронизации с телекамерой, а также устройство оптического сопряжения телекамеры с контролируемой поверхностью и систему сканирования поверхности контролируемого объекта. Устройство оптического сопряжения выполнено многоракурсным и его одноракурсные каналы содержат оптические диафрагмирующие и поворотные элементы, обеспечивающие оптическое выделение и оптическое сопряжение отдельных участков боковой поверхности контролируемого объекта с соответствующими участками ПЗС-матрицы телекамеры. Устройство позволяет расширить функциональные возможности в части обеспечения возможности контроля рельефа и отражательной способности поверхности. 3 з.п. ф-лы, 1 ил.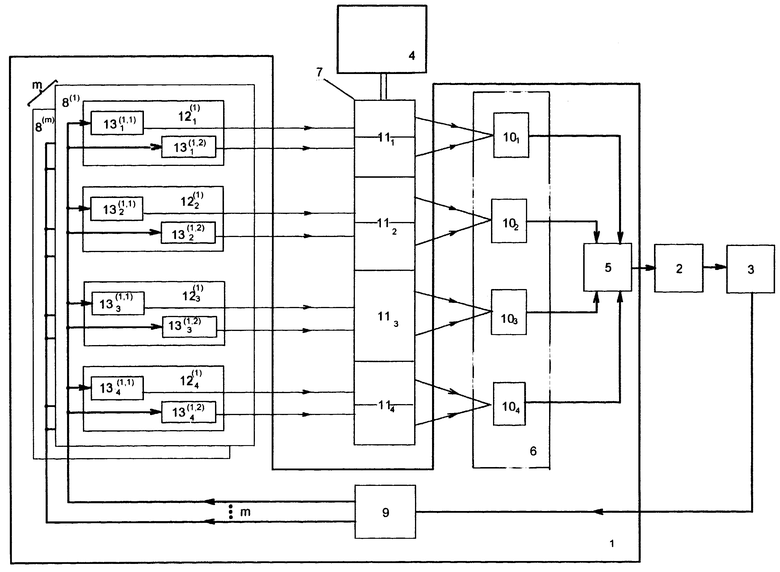
| Устройство для оптико-телевизионного контроля поверхности трубы | 1990 |
|
SU1775603A1 |
| Телевизионное устройство для измерения профиля детали | 1989 |
|
SU1755049A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
