Группа изобретений относится к способу неразрушающего контроля механического состояния объектов под нагрузкой и устройству для его осуществления. Область применения охватывает отрасли науки и техники, где ведется аттестация качества материалов, диагностика накопления повреждаемости, прогнозирование ресурса работы объектов техники, например авиации, атомной энергетики, химической промышленности, строительства, машиностроения, ракетной техники, нефтяной и газовой промышленности и др.
Известны и широко применяются различные способы неразрушающего контроля механического состояния объектов. Например, визуально-оптический (1) или голографический (2) и др.
Существенным признаком этих способов и устройств является то, что производится анализ получаемых изображений согласно определенным методикам, алгоритмам или теоретическим моделям и делается вывод о состоянии материала. Так, например, по характеру следов скольжения на поверхности для известного класса материалов можно судить о том, что стадии диаграммы нагружения соответствует исследуемый в оптический микроскоп участок объекта (образца, угла конструкции и др. ) (3). Появление микротрещин, (наблюдаемых металлографически или рентгенографически) свидетельствует о критическом состоянии предразрушения материала.
Недостатки способов и устройств заключаются в громоздкости выполнения, в малой области применения (только в исследовательских задачах), низком быстродействии (требуется производить фотосъемку поверхности) и значительной стоимости. Кроме этого, указанные способы и устройства анализируют либо незначительные деформации, по которым трудно предсказать разрушение материала, либо большие деформации, обусловленные появлением трещин, наличие которых представляет собой фактическое разрушение материала. Последнее обстоятельство делает невозможным использовать эти способы и устройства для аттестации (диагностики) ответственных конструкций (самолетов, сосудов высокого давления, газо- и нефтепроводов).
В качестве прототипа рассмотрим способ определения напряжений и деформаций в нагруженном объекте, при котором его освещают когерентным излучением лазера до нагружения и после него и получают пару совмещенных спекл-изображений. Затем преобразуют спекл-изображения в дифракционную картину, по анализу которой определяют величину деформаций и напряжений в различных точках упругодеформированного объекта (4). Устройство, реализующее этот способ, содержит когерентный источник света (лазер), телекамеру, интерфейс и компьютер. С помощью телекамеры считывают два спекл-изображения, которые записываются в компьютер. Спекл-изображения в компьютере преобразуются в дифракционную картину, по геометрическим характеристикам (угол наклона линий, расстояние между линиями) которой определяют величину деформаций и напряжений материала.
Недостатки такого способа и устройства заключаются, во-перовых, в незначительной области применения, т.к. возможен анализ только небольших деформаций и невозможен анализ топологии поверхности, во-вторых, низкой точностью работы, обусловленной тем, что анализируются смещения областей поверхности на расстояние не более 100 мкм, т.к. при больших смещениях дифракционная картина не наблюдается и способ и устройство невозможно реализовать, в третьих, в низком быстродействии, характеризующемся тем, что невозможно быстро переместить устройство на новую аттестуемую область.
Для выяснения особенностей, возможностей и недостатков известных способов и устройств рассмотрим механизмы деформации и разрушения материала.
Известны модели, определяющие различные механизмы пластической деформации и разрушения на микроуровне (5). При этом реакцию реальных материалов на внешнюю нагрузку они объясняют с позиции теории дислокаций.
С другой стороны, на основе эмпирических уравнений механически сплошной среды разработаны инженерные методы расчета напряженного деформированного состояния реальных материалов и конструкций на макроуровне.
Недостатком указанных способов определения механического состояния материалов является то, что и в том, и в другом случае не учитывается внутренняя неоднородная структура материала: границы зерен, фаз, неоднородные поля внутренних напряжений и др.
Непосредственное наблюдение изменения рельефа поверхности образцов большого класса поликристаллических материалов при разных увеличениях обнаруживает специфические особенности самоорганизации дефектных структур масштаба, соизмеримого с элементами структуры (зерном, выделением). Выявленные закономерности невозможно объяснить в рамкам дисклокационных представлений.
Взаимосвязь между характеристиками развития дефектной структуры, искажающей рельеф поверхности, и процессами пластического формоизменения в объеме материала является предметом рассмотрения (6, 7) мезомеханики. Специфические особенности пластического течения на мезоуровне, определяющем связь с микро- и макроуровнем, вызваны движением объемных элементов структуры, формирующихся в процессе нагружения и эксплуатации.
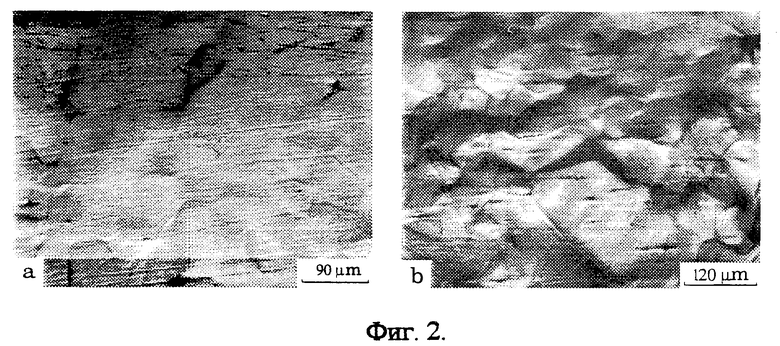
С позиции мезомеханики в нагруженном материале происходит постоянный процесс диссипаций упругой энергии на концентраторах напряжений различного масштаба. С самого начала нагружения в объеме возникают сильные градиенты и концентрации напряжений на неоднородностях структуры (границ и стыков зерен, фаз, микронесплошностей). Микроконцентраторы характеризуются пиковыми напряжениями в областях, соизмеримых с физической толщиной границ зерен, фаз, стыков зерен (в пределах нескольких межатомных расстояний кристаллической решетки). Зарождающиеся на концентраторах деформационные дефекты (дислокации, дисклинации) распространяются на расстояния, соизмеримые с областью повышенной концентрации градиентов напряжений. Массоперенос при релаксации микроконцентраторов незначителен. Накопление пластической деформации в локальных объемах приводит к возникновению мезоконцентраторов, т.е. областей повышенной концентрации напряжений, соизмеримых с размерами структурных элементов (зерен, фаз, фрагментов). Основным механизмом дисспации упругой энергии при этом является формирование полос локализованной пластической деформации. Специфической особенностью таких полос является ориентация их под углом максимальных скалывающих напряжений относительно внешнего напряжения независимо от кристаллической ориентации кристаллитов (фиг.2, 6, 7).
Формирование полос локализованной пластической деформации (ЛДП) является универсальным механизмом деформации материалов на мезоуровне. Их взаимодействие приводит к фрагментации материала. При этом происходит релаксация внутренних напряжений за счет самосогласованных смещений и разворотов смежных фрагментов структуры друг относительно друга. Развороты объемных элементов определенным образом искажают поверхность.
Таким образом, коллективное движение большого количества микродефектов (дислокаций, вакансий и др.) в неоднородной структуре порождает особенности, не свойственные индивидуальному дефекту в ансамбле. Уже не играет роль кристаллографическое строение материала. Первостепенным является условие силового нагружения внешней поверхности и геометрическая форма образца, а также форма элементов исходной структуры (геометрия и размеры фаз, зерен).
Установлено, что для широкого класса материалов (поликристаллов металлов и сплавов, полимеров, керамик, композиционных материалов) и для разных видов испытаний (активное растяжение, сжатие, ползучесть, циклическая усталость) процесс фрагментации является универсальным явлением в твердых телах и свидетельствует о начале прогрессирующей деградации материала, о подготовке материала к разрушению, иногда задолго до появления видимых (в микроскоп) трещин. Таким образом, количественные и качественные характеристики мезоструктуры поверхности пластически деформирующихся материалов могут служить тестом механического состояния.
Техническая задача изобретения состоит в расширении функциональных возможностей, повышении точности и быстродействия способа и устройства.
Поставленная цель достигается тем, что в известном способе, заключающемся в том, что получают оптические изображения поверхности исследуемого объекта, разнесенные между собой по времени, и сравнивают параметры изменения изображений с тарировочными параметрами, получают оптико-телевизионные изображения поверхности от некогерентного источника света, которые фильтруют и увеличивают на величину, определяемую требуемой разрешающей способностью оценки параметров деформации, определяют изменение топологии поверхности при устранении углового рассогласования изображений и прогнозируют ресурс работы.
Кроме того, особенность способа заключается в том, что производят монтаж изображений локальных участков при перемещении источника света, светофильтра и приемника изображения относительно объекта.
Кроме того, особенность способа заключается в том, что при увеличении изображений до 500 раз определяют дифференциальные и интегральные характеристики перемещений локальных объемов объекта.
Кроме того, особенность способа заключается в том, что определяют наличие и величину геометрических характеристик дефектов структуры в виде дисклинации, и/или поворотов структурных элементов, и/или полосовых структур, и/или зоны локализованной пластической деформации на поверхности объекта.
Кроме того, особенность способа заключается в том, что для сравниваемой пары изображений строится поле векторов смещений, определяющие величину смещений локальных объемов объекта с требуемой точностью.
Кроме того, особенность способа заключается в том, что по картине векторов смещений определяются распределения компонентов тензора дисторсии εx,εy,εxy,εxy и ωz в локальных объемах.
Указанный единый технический результат при осуществлении группы изобретения по объекту-устройству достигается тем, что в известное устройство, содержащее источник света, телекамеру, последовательно соединенные двунаправленной шиной интерфейс, выходами подключенный к монитору, микрокомпьютер и дисплей, дополнительно введены блок управления подсветкой, световой фильтр, выполненный в виде световолоконных пластин или кабелей, блок увеличения изображения, буферное запоминающее устройство, блок переключения, первый и второй блоки управления, блок дискретных перемещений и поворотов и дополнительный интерфейс, причем первые вход и выход светофильтра оптически связаны с объектом, второй вход светофильтра связан с вторым выходом некогерентного источника света, а выход - через блок увеличения изображения с входом телекамеры, буферное запоминающее устройство включено между выходом телекамеры и двунаправленным входом интерфейса, дополнительный интерфейс двунаправленной шиной связан с первым и вторым блоками управления, с интерфейсом и с блоком управления подсветкой, который отдельными входом и выходом соединен с источником света, блок дискретных перемещений и поворотов двумя отдельными двунаправленными входами соединен с первым блоком управления, а другими двумя двунаправленными входами соединен с блоком переключения, первый выход которого подключен к объекту, а второй выход которого подключен к входам светофильтра, блока увеличения изображения, телекамеры, два отдельных входа которой соединены с двумя отдельными выходами буферного запоминающего устройства и источника света, при этом выход второго блока управления соединен с отдельным входом блока увеличения изображения, а источник света выполнен в виде некогерентного источника света.
Введение светофильтра, блока увеличения изображения, буферного запоминающего устройства, дополнительного интерфейса, первого и второго блока управления, блока дискретных перемещений и поворотов, блока переключения и выполнение источника света в виде некогерентного источника света позволяет выявить сильнодеформированный участок поверхности и определить количественные характеристики деформации.
Заявленная группа изобретений соответствует требованию единства изобретения, т. к. один из объектов изобретения (а именно, устройство) предназначен для осуществления другого заявленного объекта группы - способа неразрушающего контроля механического состояния объектов, и при этом оба объекта группы изобретений направлены на решение одной и той же задачи с получением единого технического результата.
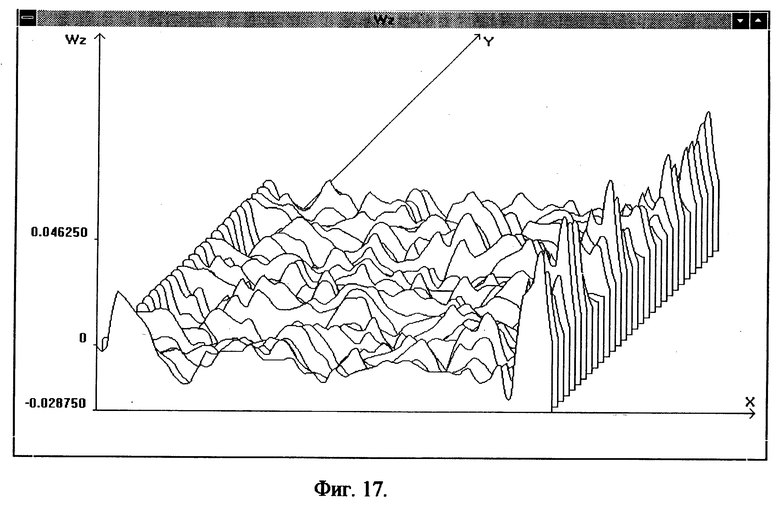
На фиг.1 дана структурная схема устройства.
На фиг.2 даны оптико-телевизионные изображения, показывающие рельеф поверхности поликристаллического материала (Fe + 3at.% Si) для степени деформации а) ερ = 0,1% и б) ερ = 8%.
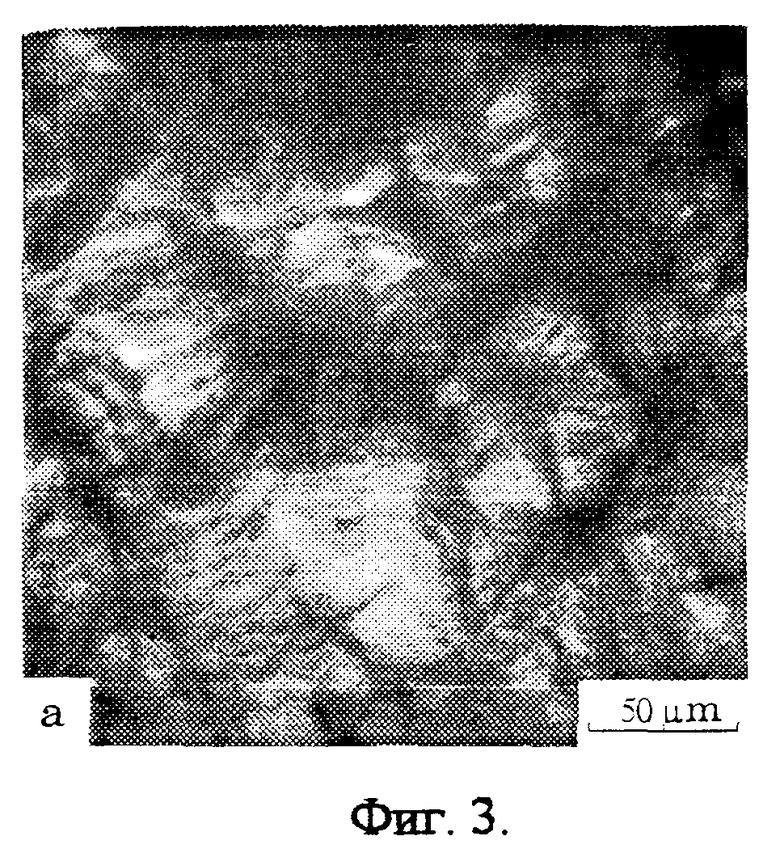
На фиг. 3 представлены полосовые структуры в поликристаллах TiNi с мартенситной структурой при растяжении (размер зерна d = 16 мкм).
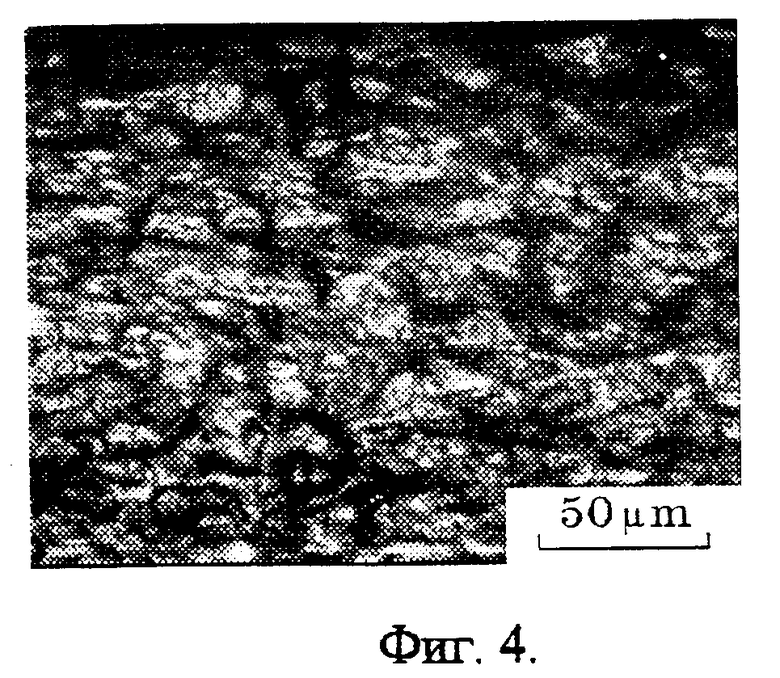
На фиг.4 показано оптико-телевизионное изображение, демонстрирующее вихревую структуру в поликристаллах TiNi с мартенситной структурой при растяжении (ερ = 20%).
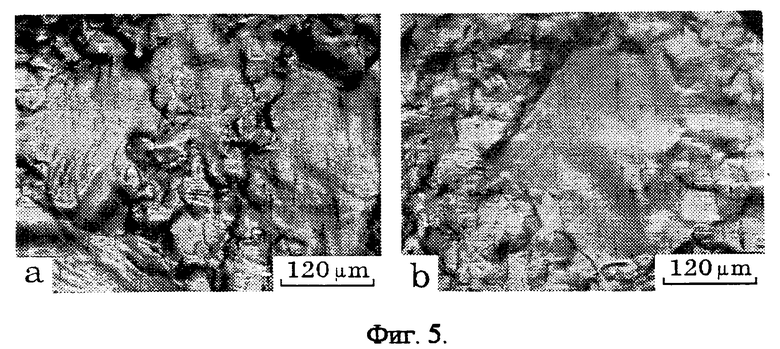
На фиг. 5 представлены оптико-телевизионные изображения мезовихревых структур в разнозернистом Fe + 3at.% Si при ερ = 8%: а) взаимодействие двух вихрей и б) крупное зерно в окружении мелких зерен.
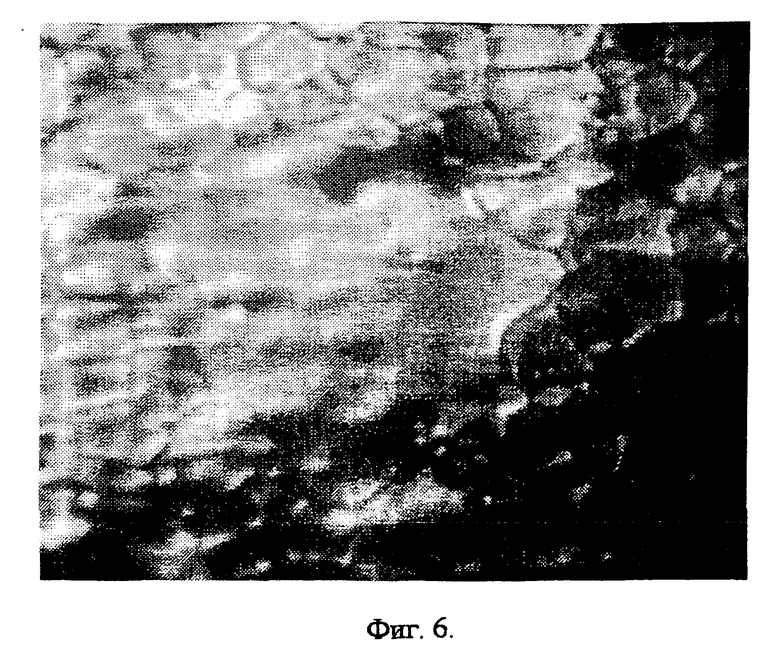
На фиг. 6 представлено недеформированное (эталонное) изображение (ЭИ) поверхности.
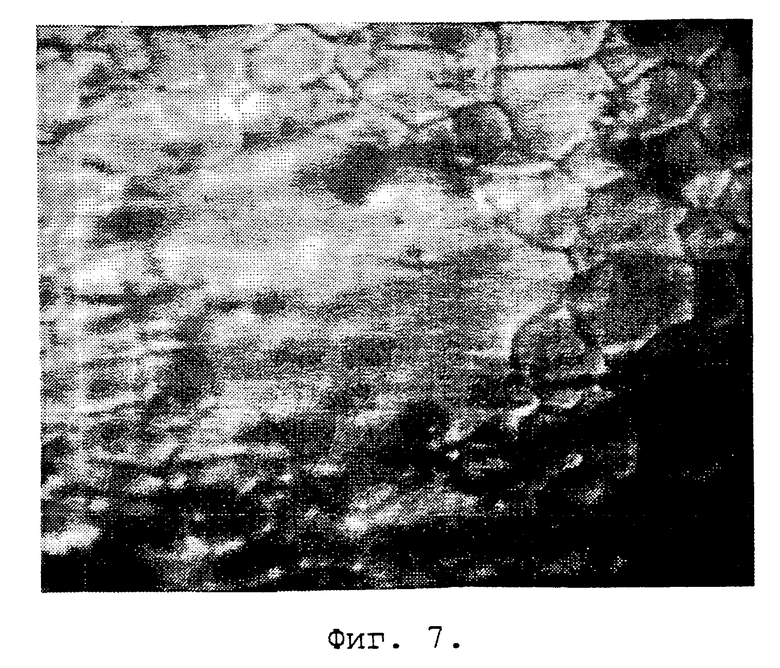
На фиг.7 представлено деформированное (текущее) изображение (ТИ) поверхности.
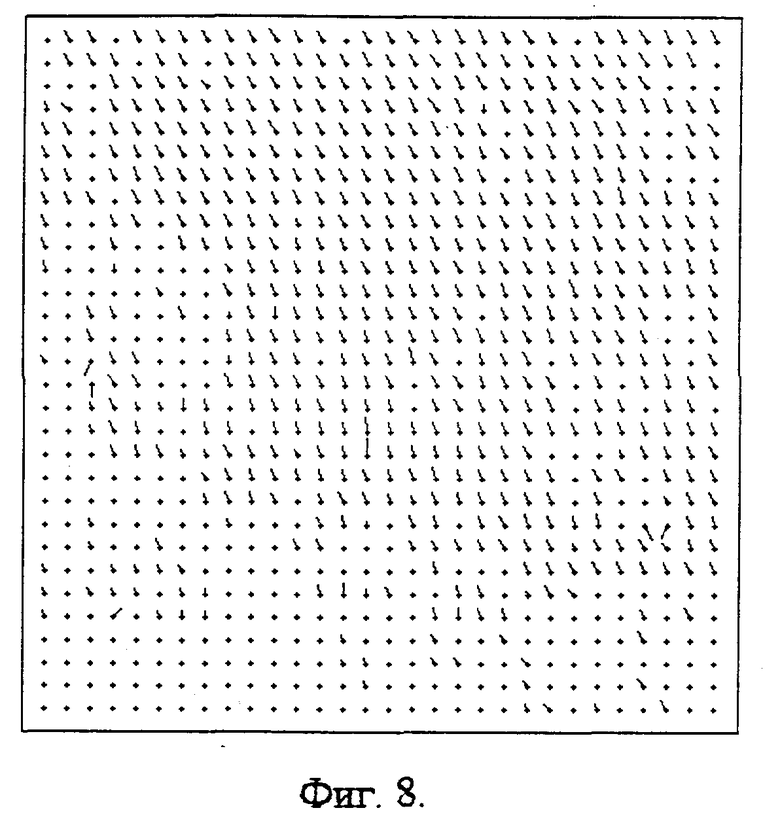
На фиг.8 представлено поле векторов смещений (локальных деформаций) материала, построенного устройством.
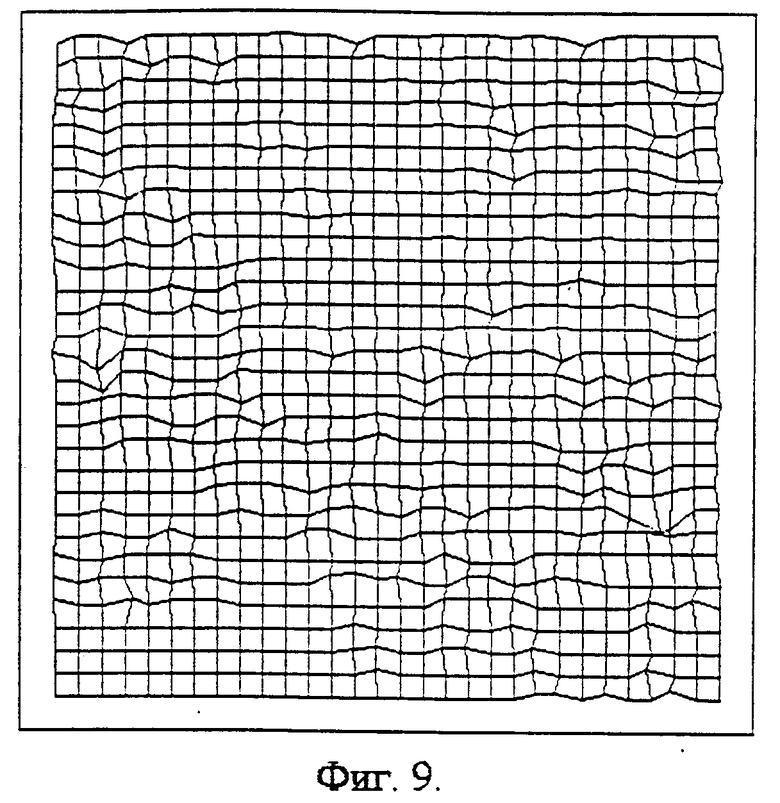
На фиг.9 представлена сетка, искажение которой отображает степень деформации материала.
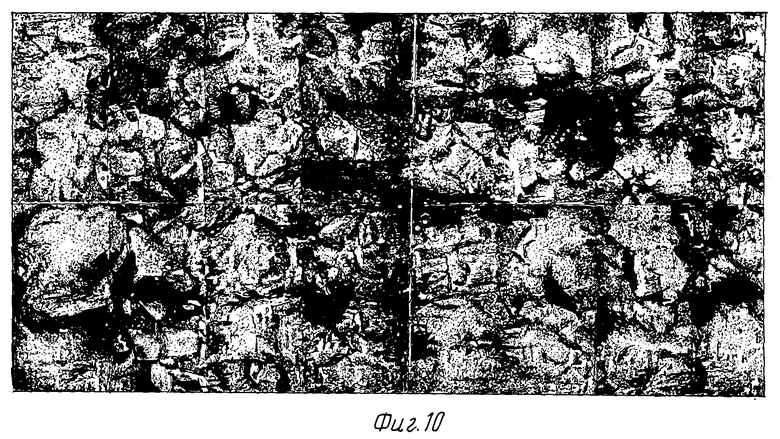
На фиг.10 представлено изображение поверхности испытываемого материала, получаемое путем монтажа фрагментов соседних участков поверхности в единую картину.
На фиг.11 дано распределение сдвиговой εxy и поворотной ωz компонент тензора дисторсии по строке.
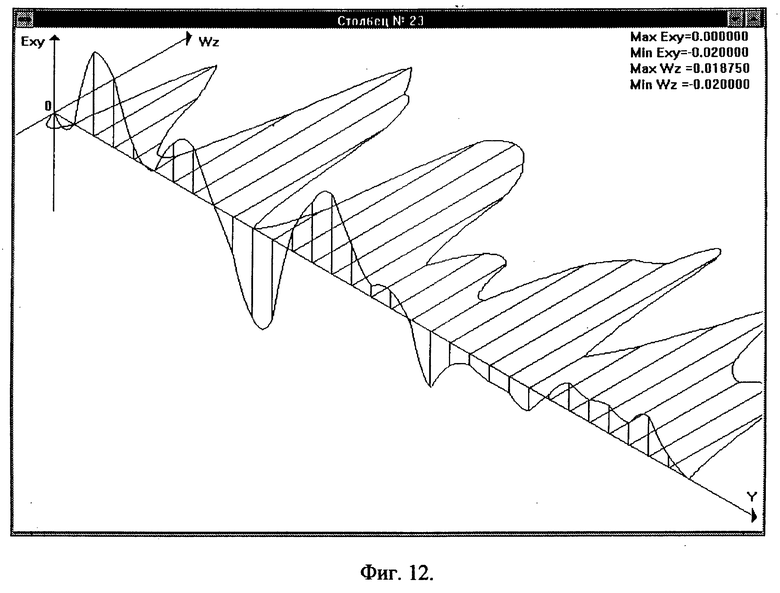
На фиг.12 дано распределение сдвиговой εxy и поворотной ωz компонент тензора дисторсии по столбцу.
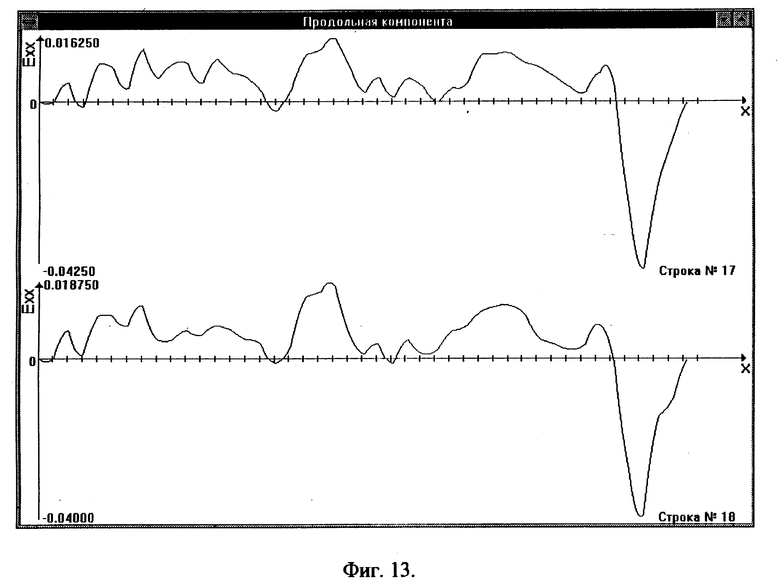
На фиг. 13 представлено распределение продольной компоненты тензора дисторсии по двум соседним строкам.
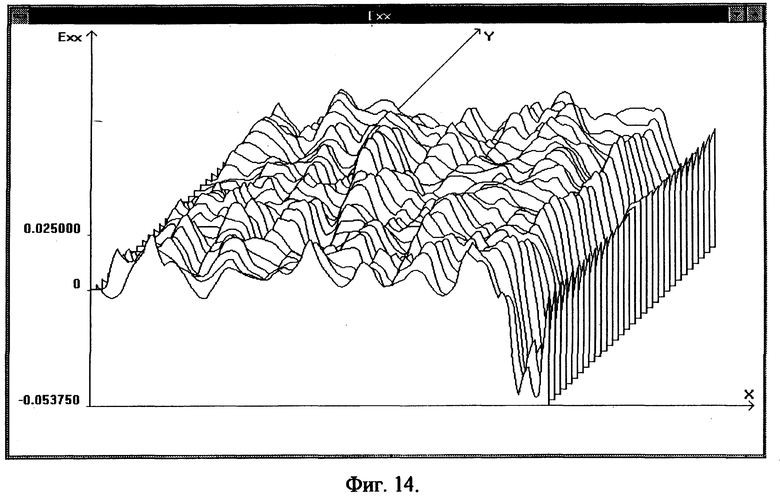
На фиг.14 дано объемное представление распределения продольной компоненты тензора дисторсии.
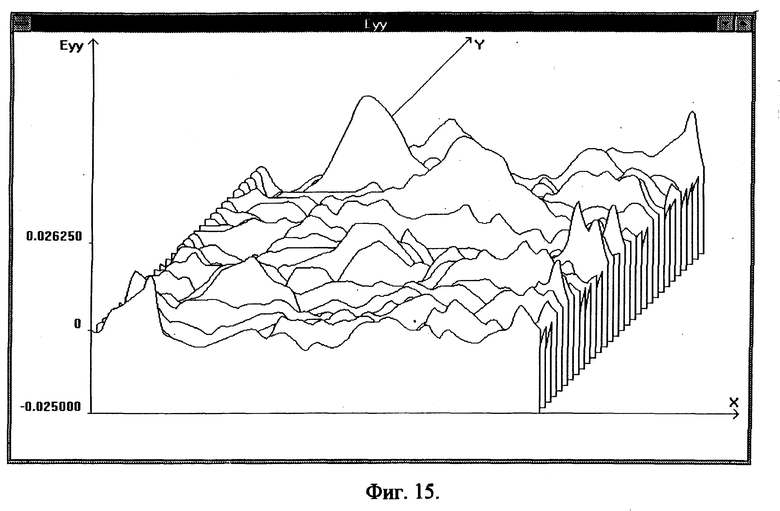
На фиг. 15 представлено объемное представление распределения поперечной компоненты тензора дисторсии.
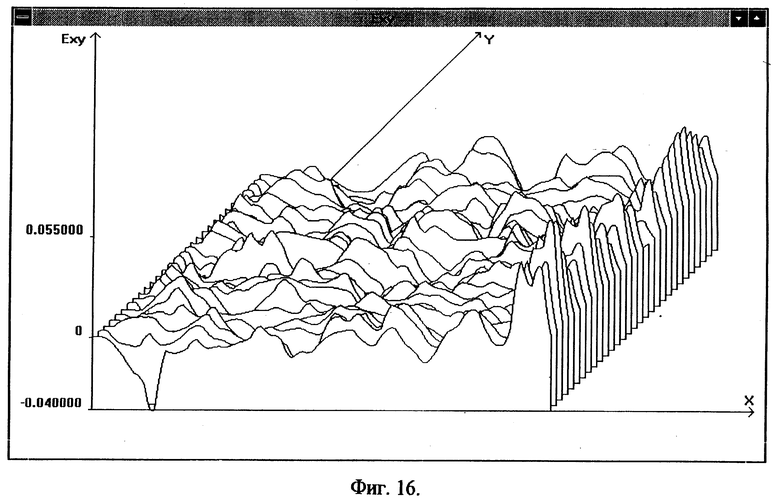
На фиг. 16 дано объемное изображение распределения сдвиговой компоненты тензора дисторсии.
На фиг. 17 представлено объемное изображение поворотной компоненты (составляющей) тензора дисторсии.
На фиг.1 даны следующие обозначения:
1 - некогерентный источник света (НИС);
2 - блок управления подсветкой (БУП);
3 - объект (О);
4 - светофильтр (С);
5 - блок увеличения изображения (БУИ);
6 - телевизионная камера (ТК);
7 - буферное запоминающее устройство (БЗУ);
8 - интерфейс (И);
9 - монитор (М);
10 - электронная вычислительная машина (ЭВМ);
11 - дисплей (Д);
12 - дополнительный интерфейс (ДИ);
13 - первый блок управления (1БУ);
14 - второй блок управления (2БУ);
15 - блок дискретных перемещений и поворотов (БДПП);
16 - блок переключения (БП).
Прежде чем перейти к рассмотрению предлагаемого способа неразрушающего контроля механического состояния объекта, обратимся к варианту выполнения устройства, из рассмотрения работы которого станет ясна и суть самого способа.
Из приведенной схемы на фиг.1 следует, что вход НИС 1 соединен с выходом БУП2, а выход НИС1 оптически связан с объектом 3, входы НИС1 и БУП2 соединены между собой; объект 3 оптически связан через последовательно соединенные светофильтр 4, блок увеличения изображения 5 с телекамерой 6; выход телекамеры 6 подключен к входу БЗУ7, два отдельных выхода БЗУ7 соединены с входами телекамеры 6, а другой выход БЗУ7 соединен двунаправленной шиной с входом интерфейса 8, три отдельных выхода которого подключены к входам монитора 9; другой отдельный вход интерфейса 8 соединен двунаправленной шиной через ЭВМ 10 с входом дисплея 11; другой отдельный выход интерфейса 8 соединен двунаправленной шиной с входом дополнительного интерфейса 12, первый отдельный вход которого подключен двунаправленной шиной с входом БУП2, второй отдельный вход ДИ12 соединен с двунаправленной шиной с первым входом первого блока управления 13, а третий вход ДИ12 подключен двунаправленной шиной к входу второго блока управления 14; выход второго блока управления 14 подключен к входу БУИ5; второй отдельный вход первого БУ13 соединен двунаправленной шиной с отдельным входом БДПП15; отдельный выход первого БУ13 подключен к другому входу БДПП15; другой отдельный вход БДПП15 соединен с входом БП16, второй вход которого соединен с выходом БДПП15; выход БП16 подключен к отдельным входам светофильтра 4, НИС1, БУИ5 и ТК6; другой отдельный выход БП16 подключен к объекту 3.
Устройство работает в двух режимах: подготовка эталона и измерение (контроль поверхности). В режиме подготовки эталона формируется эталонное изображение недеформированного участка поверхности материала. Для этого по сигналу от ЭВМ10 через интерфейс 8, ДИ12 и БУП2 включается НИС1, освещающий через светофильтр 4 контролируемую поверхность объекта 3. НИС1 и БУП2 содержит источник света (электролампочку накаливания) и фильтр с объективом, с помощью которых формируется рассеивающийся пучок света требуемой длины волны. Варианты исполнения НИС и БУП описаны в (8, стр.81-82). В процессе работы БУП2 управляет мощностью излучения источника света. Освещаемый участок воспринимается и передается светофильтром 4 на вход БУИ5. Светофильтр 4 используется для формирования качественного (безбликового) изображения и съема изображения в труднодоступных местах конструкции (8) (например, внутренние полости сосудов, рабочих каналов и др.). В качестве светофильтра 4 используются световолоконные пластины или кабели. Световолоконные элементы обладают следующим известным свойством: каждый элементарный пучок световых лучей, направленный под любым углом на торец пластины или кабеля, после многократных отражений от стенок волокна сформируется в виде узкого круглого конуса, подающего на поверхность материала. При таком освещении ровные участки рельефа поверхности будут отображаться светлыми, а наклонные участки поверхности, освещаемые под косым углом, - в виде темных контурных линий. Изображение сменится на негативное при освещении торца пластины (или кабеля) лучами, падающими под очень острым (как бы скользящим) углом. При таком освещении не возникают никаких мешающих эффектов (бликов) даже при наличии отполированных участков поверхности, так как любой направленный блик световолоконный элемент преобразует в круглый конус лучей (9,10).
Изображение, соответствующее недеформированному состоянию участка поверхности, увеличивается БУИ5 до необходимого масштаба, определяемого требуемой разрешающей способностью оценки параметров деформации. Регулировка масштаба осуществляется вторым БУИ14 по сигналам от ЭВМ10 (через ДИ18 и ДИ12). В качестве БУИ используется оптический микроскоп с управляемой оптикой (объективом) (11). Увеличенное изображение с БУИ5 проецируется на фотоприемник ТК6, преобразуется в электрический сигнал и записывается в БЗУ7. Варианты используемых камер, характеризующиеся высокой разрешающей способностью, описаны в (12, стр.52-71). В качестве БЗУ используется устройство, описанное в (8, с.202, рис.5.22). При записи изображения в БЗУ с ТК6 снимается и подается видеосигнал, а с БЗУ7 на ТК6 подаются две последовательности синхроимпульсов (строчный и кадровый). Далее изображение переписывается в память ЭВМ10 (через И8). После этого с помощью первого БУ13, БДПП15 и БП16 осуществляется смещение НИС1, светофильтра 4, БУИ5, ТК6 для считывания второго участка поверхности (кадра изображения). Таким образом в память ЭВМ записываются изображения, характеризующие недеформированное состояние контролируемой области поверхности. Управляет процессом записи изображения в БЗУ7 и далее микрокомпьютер ЭВМ10. Изображение, записываемое в ЭВМ, отображается на мониторе 9. Необходимая информация отображается на дисплее 11. На этом режим подготовки эталона (эталонного изображения - ЭИ) заканчивается и начинается режим контроля.
В режиме контроля НИС1, БУП2, светофильтр 4, БУИ5, ТК6, БЗУ7, И8, ДИ12, монитор 9 и дисплей 11 функционируют аналогично режиму подготовки эталона. В этом режиме текущее изображение (ТИ), соответствует уже деформированному состоянию участка поверхности, изображение которого считывалось ранее в режиме подготовки эталона, также записывается в БЗУ7. Для устранения углового рассогласования ТИ и ЭИ производится поворот ТИ в плоскости, параллельной плоскости ЭИ. При угловом совмещении ТИ и ЭИ применяется метод меток, заранее нанесенных на ТИ и ЭИ, или применяется интегральный метод устранения углового рассогласования двух изображений (например, путем построения и анализа взаимнокорреляционной функции ТИ и ЭИ). С этой целью по сигналам от ЭВМ10 через И8, ДИ12, первый БУ13 с помощью БДПП15 и второго БУ14 осуществляется поворот НИС1, светофильтра 4, БУИ5 и ТК6 в плоскости, параллельной контролируемой поверхности объекта 3. Считываемое при этом ТИ совмещается по угловой координате с ЭИ. Так продолжается (считывание, поворот и программное совмещение) до тех пор, пока не будет полного устранения углового рассогласования ТИ и ЭИ. Варианты исполнения первого БУ13, БДПП15 и БП16 даны в (8, с. 250-254; 12). В случае необходимости перемещается и поворачивается объект 3 относительно светофильтра 4. Это обуславливается невозможностью размещения НИС1, светофильтра 4, БУИ5 и ТК6 внутри какой-либо конструкции (например, стержень, находящийся внутри трубы). Для этого с помощью БП16 производится переключение зацепления от перемещения и поворота НИС1, светофильтра 4, БУИ5 и ТК6 к перемещению и повороту объекта 3.
Один из алгоритмов работы устройства в общем виде описывается следующим выражением 1
ν = arcextrJ[F1,F2(ν)],
где F1, F2 - функции, описывающие ТИ и ЭИ;
J - номера близости ТИ и ЭИ; оценка искомых параметров деформации материала (величина смещения и угол поворота структурного элемента (зерна); геометрические характеристики (пеример, площадь, ширина, длина) зерна; величина смещения участка поверхности).
оценка искомых параметров деформации материала (величина смещения и угол поворота структурного элемента (зерна); геометрические характеристики (пеример, площадь, ширина, длина) зерна; величина смещения участка поверхности).
где j - номер строки;
i - номер пиксела в строке;
m1, m2 - математические ожидания;
F1, F2 - значение яркости пикселов;
n - размер фрагмента.
Ниже в качестве примера приводится результат работы статистического (модифицированного корреляционного) алгоритма аттестации материала. Использовались два изображения - ТИ и ЭИ. На фиг.6 дано ЭИ, соответствующее недеформированному участку подготовленной (шлифованной и протравленной) поверхности, а на фиг.7 - ТИ, соответствующее деформированному участку этой же поверхности.
В случае необходимости ТИ и ЭИ можно построить больших размеров путем сканирования (смещения) телевизионной камерой по исследуемому образцу и "сшивания" считываемых изображений (см. фиг.10). После этого сравнивались участки ТИ и ЭИ и строилась карта векторов смещений (см. фиг.8), на которой стрелками отмечалось направление и величина смещения площадок (очевидно, что точка соответствует минимальному (нулевому) смещению). Программное обеспечение ОТИС позволяет проанализировать любую строку или столбец карты и простроить распределение компонент тензора дисторсии, характеризующее параметры деформации (см. фиг. 11 - 17). В заключение строится сетка, отображающая информацию о величине деформации поверхности, определяемой степенью искажения периодических ячеек (см. фиг.9).
Программное обеспечение для параметров пластической деформации позволяет на основании вычисленных предварительно векторов смещений элементарных участков поверхности исследуемого материала (фиг.8) рассчитать компоненты тензора дисторсии: продольную компоненту εxx, поперечную компоненту εyy, сдвиговую компоненту εxy и поворотную компоненту ωz. Удобный пользовательский интерфейс обеспечивает наглядность отображения как распределения компонентов тензора дисторсии по любой строке (фиг.1), столбцу (фиг.12) или двум соседним строкам (фиг.13) карты векторов смещений, так и получать объемное представление распределения компонентов тензора дисторсии вдоль всего рассматриваемого участка поверхности (фиг.14, 15, 16, 17). Для вычисления компонентов тензора дисторсии использовались следующие известные соотношения:

Программное обеспечение представляет пользователю возможность распечатать любое из полученных изображений на любом из имеющихся в наличии принтеров. Возможность выбора цвета для представления кривых значительно повышает качество визуального восприятия изображений на экране дисплея.
Распределение компонентов тензора дисторсии по строке и столбцу отображается в изометрической системе координат, что позволяет не только удобно представить графический материал, но и четко прослеживать зависимость компонентов между собой.
По сравнению с известными предлагаемый способ и устройство обладают более широкими функциональными возможностями, а также имеют более высокую точность работы и более высокое быстродействие. Покажем это на примере работы устройства.
Расширение функциональных возможностей реализуется за счет значительного расширения области используемых изображений.
Точность работы устройства повышается за счет:
1) определения информативных топологических признаков на деформируемой поверхности и диагностики состояния материала;
2) увеличения изображения исследуемого участка объекта, осуществляемого БУИ (микроскопом) и световодом (световолоконная пластина или кабель);
3) совмещения сравниваемых изображений по углу их относительного разворота, производимого с помощью БДПП;
4) "сшивания" кадров изображений и анализ больших участков поверхности, осуществляемого сканированием ТК с помощью БДПП;
5) анализ труднодоступных мест конструкции производится путем ввода световолоконных элементов в аттестуемые области;
6) устранения бликов, осуществляемого световолоконным элементом;
7) фильтрации и предварительной обработки видеоинформации (телевизионных изображений).
Повышение точности работы способа и устройства за счет выделения информативных признаков осуществляется путем точного определения наличия этих информативных признаков или локальных смещений деформируемых участков поверхности материала и сопоставления их с тарировочными коэффициентами, полученными ранее. Например, экспериментально установлено, что точность (суммарная ошибка - систематическая и случайная составляющие погрешности) определения локальных смещений составляет 0,5 - 5 микрон при анализе больших площадей поверхности, производимого сканированием ТК по БДПП.
Точность работы устройства повышается также за счет увеличения изображения исследуемого участка объекта, в результате чего устройство сможет анализировать более мелкие (микроскопические) смещения и развороты исследуемых участков. Действительно известно, что с помощью микроскопа можно (значительно) уменьшить анализируемую площадь. Кроме того, осуществляемое световолоконным элементом увеличение масштаба изображения позволяет "растянуть" необходимый участок еще сильней (т.е. часть изображения на весь кадр) и произвести детальное исследование необходимого участка объекта. Таким образом, в результате применения микроскопа и световлоконного элемента (световода) общее (суммарное) увеличение устройства будет:
Nc = Nм • NСЭ (4)
где Nм, NСЭ - увеличение микроскопа и световолоконного элемента (СЭ) соответственно.
Например, использование микроскопа МБС-9 с увеличением 14 и СЭ с увеличением 10 NСЭ = 140.
Точность работы устройства повышается также за счет предварительной обработки считываемого изображения. Напомним, что предварительная обработка ТИ осуществляется с целью удаления шумов (сглаживание, фильтрация), улучшения контрастности, коррекции изображений. Здесь применены методы интерполяции сплайн-функциями и фильтрации нерекурсивным фильтром (3, с.29 - 30).
Предлагаемое устройство обладает более высоким быстродействием по сравнению с известным в n раз, т.е.
где tпрот - быстродействие прототипа;
tпр.устр. - быстродействие предлагаемого устройства.
Быстродействие прототипа находится по следующей простой формуле:
t1 - время, необходимое для включения НИС (обычно t1 = 0,001 с);
t2 - время прохождения света от НИС до объекта и от объекта до телевизионной камеры;
t3 - время считывания изображения телевизионной камерой;
t4 - время преобразования изображения интерфейсом (преобразования аналогового сигнала в цифровой);
t5 - время обработки видеоинформации на ЭВМ;
t6 - время, необходимое для перемещения устройства на новый (аттестационный) участок.
Время t2 можно не учитывать из-за малости (оптический сигнал от лазера до телекамеры распространяется со скоростью света). Время t3 = t4 = 2 • 10-2 с (для изображения размером 256 х 256 (8, стр.192 - 212), а время t5 = 15,0 с (время сравнения изображений на ЭВМ и оценка величины деформации) (3, стр. 217). Время t6 = 60,0 с. Подставляя данные в (6), получаем tпрот. = 75,041 с.
Быстродействие предлагаемого устройства находится по формуле (7)
где t'1 - время, необходимое для смещения НИС, световода, БУИ, телевизионной камеры на требуемый участок (реализуется с помощью БДПП);
t'2 - время, необходимое для включения НИС (через БУП);
t'3 - время прохождения света от НИС до объекта и от объекта до телевизионной камеры;
t'4 - время считывания изображения с помощью телевизионной камеры;
t'5 - время, необходимое для установки требуемого масштаба;
t'6 - время необходимое для предварительной обработки изображения с помощью блока предварительной обработки;
t'7 - время записи ТИ в буферное запоминающее устройства;
t'8 - время, необходимое для совмещения изображений по углу их относительного разворота;
t'9 - время обработки информации на микроЭВМ.
Перечисленные времена имеют следующее значение: t'1 = 1,0 с (с.251); t'2 = t1 = 0,001 с; t'3 = t2 = 0; t'4 = t3 = 0,02 с; t'5 = 0,001 с; t'6 = t'7 = t3 = 2 • 10-2 с; t'8 = 2,0 с; t'9 = 0,02 с. Подставляя в (7), получаем tпр.устр. = 2,080 с. В итоге получаем, что быстродействие предлагаемого устройства в  раза выше, чем у известного.
раза выше, чем у известного.
Литература
1. Неразрушающий контроль металлов и изделия. Справочник. - М.: Машиностроение, 1996, 456 с.
2. Островский Ю.И., Щепинов В.П. и др. Голографические интерференционные методы измерения деформаций. - М.: Наука, 1988, 248 с.
3. Collacott R. A., Structural Integrity Monitoring. London Chapmanand Hall. 1985.
4. PCT/WO 087/07365 A1, 03.12.87.
5. Handbook on Experimantal Mecanics". Ed. By A.S.Kobayashi Pretice Hall. Inc, 1987.
6. Панин В.Е. и др. Физическая мезомеханика и компьютерное конструирование материалов. 2 т. - Новосибирск: Наука, Сибирская издательская фирма РАН, 1995, т.1, с.2.
7. Панин В.Е. Методология физической мезомеханики как основа построения моделей в компьютерном конструировании материалов. Физика. Известия ВУЗов в России. - 1995, N 11, с.6-25.
8. Кориков А.М., Сыромяткин В.И. и др. Корреляционные зрительные системы роботов. - Томск: Радио и связь. Томское отд., 1990, 264 с.
9. Семенов А.С., Смирнов В.Л. и др. Интегральная оптика для систем передачи и обработки информации. - М.: Радио и связь, 1990, 224 с.
10. Зак Е.А. Волоконно-оптические преобразователи с внешней модуляцией. - М.: Энергоиздат, 1989, 128 с.
11. Акаев А.А., Майоров С.А. Оптические методы обработки информации. - М.: Высшая школа, 1988, 237 с.
12. Сыромяткин В. И. , Титов В.С. и др. Системы технического зрения. Справочник. - Томск: МГП "РАСКО" при изд. "Радио и связь", 1990, 380 с.

Способ и устройство неразрушающего контроля состояния объектов относится к отраслям науки и техники, где ведется аттестация качества материалов: к авиации, атомной энергетике, химической промышленности, строительству и др. В части способа получают оптические изображения поверхности исследуемого объекта, разнесенные между собой по времени, сравнивают параметры изменения изображений с тарировочными параметрами, причем изображения получают оптико-телевизионные от некогерентного источника света, фильтруют их и увеличивают на величину, определяемую требуемой разрешающей способностью, определяют изменение топологии поверхности при устранении углового рассогласования изображений и прогнозируют ресурс работы. Устройство для неразрушающего контроля объекта содержит источник света, телекамеру, интерфейс, монитор, микрокомпьютер и дисплей, блок управления подсветкой, светофильтр, блок увеличения изображения, буферное запоминающее устройство, блок переключения, первый и второй блоки управления, блок дискретных перемещений и поворотов и дополнительный интерфейс. Изобретение позволяет расширить функциональные возможности, точность и быстродействие. 2 с. и 5 з.п. ф-лы, 17 ил.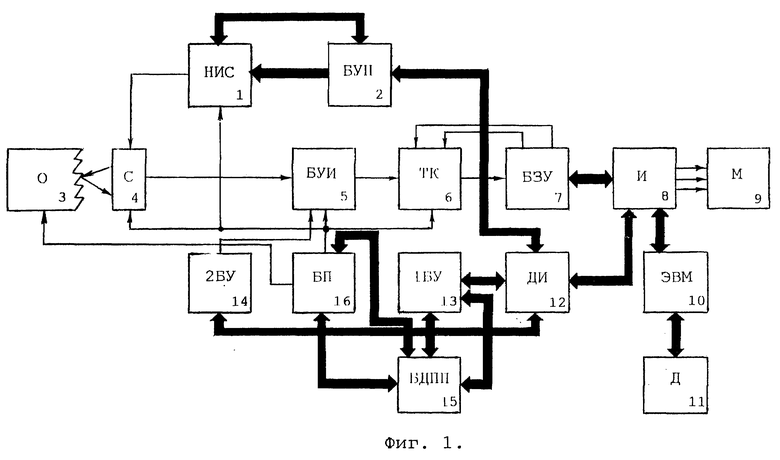
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Неразрушающий контроль металлов и изделий | |||
| Справочник | |||
| - М.: Машиностроение, 1996, с | |||
| Подвижной рельс для пересечений железнодорожных путей | 1922 |
|
SU456A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Островский Ю.И., Щепинов В.П., Яковлев В.В | |||
| Голографические интерференционные методы измерения деформаций | |||
| - М.: Наука, 1988, с | |||
| Деревянная повозка с кузовом, устанавливаемым на упругих дрожинах | 1920 |
|
SU248A1 |

