Устройство для навешивания пакетов для засыпки сыпучих продуктов с поштучным захватом пакетов относится к расфасовочно-упаковочному оборудованию и предназначено для использования в пищевой отрасли народного хозяйства, в частности, для фасовки сыпучих продуктов.
Известно устройство для навешивания пакетов для засыпки сыпучих продуктов с поштучным захватом пакетов (см., например, патент Швейцарии N 583117, кл. В 65 В 43/14, 1976 г.), содержащее корзину пакетов, уложенных горизонтально, пакетозахват, представляющий собой планку с четырьмя присосами по углам пакета, устройство для передачи пакета, выполненное в виде шарнирной передачи, когти для раскрывания пакета, зажимы для его закрепления на горловине питателя и ручной пульт управления.
Известное устройство достаточно громоздко, а наличие в нем кнопочного пульта управления затрудняет его использование в фасовочных автоматах.
За прототип выбрано устройство для навешивания мешков для засыпки сыпучих продуктов с поштучным захватом мешков (см. , например, патент РФ N 2054364, кл. В 65 В 43/39, 1992 г.), содержащее штабель мешков, устройство для подачи мешка закрытым концом вперед в вертикальное положение и средство для передачи открытого мешка к горловине питателя, состоящее из когтей для раскрывания мешка и для его перемещения из положения раскрывания в положение формирования горловины мешка, вакуумный насос, соединенный с присосами и раскрывающим устройством, содержащим две пары вакуумных когтей, при этом навешивание мешков осуществляется посредством двухрычажной системы, а вакуумные когти и поворотный рычаг снабжены автономными приводами и средствами для координации их движения.
Устройство, принятое за прототип, также достаточно сложное и не позволяет автоматизировать процесс расфасовки сыпучих продуктов.
Предлагаемое устройство решает задачу создания простого, удобного в работе устройства с автоматическим управлением.
Для этого устройство для навешивания пакетов для засыпки сыпучих продуктов с поштучным захватом пакетов, содержащее корзину пакетов, расположенных закрытым концом вверх, пакетозахват, устройство для передачи пакета к питателю, вакуумный присос и вакуумную установку, снабжено устройством для закрепления пакета на питателе, компрессором, пневмораспределителем и программным блоком управления, причем устройство для передачи пакетов к питателю представляет собой пневмодвигатель роторного типа с углом разворота 180o в вертикальной плоскости, а пакетозахват выполнен в виде планки, одним концом закрепленной на поворотной оси, связанной с выходным валиком пневмодвигателя, на другом конце планки установлен вакуумный присос, соединенный с вакуумной установкой, таким образом, что при повороте планки на угол β = 180°-α происходит разворот пакета на 180o донной частью вниз, другой конец поворотной оси установлен на фланце с цапфой, внутри которой выполнено продольное отверстие, соединенное с вырезом в виде сектора с углом α, c другой стороны связанное с трубопроводом пневмораспределителя, против выреза в цапфе в поворотной оси в поперечной плоскости выполнено другое отверстие, соединенное трубкой с форсункой, закрепленной на вакуумном присосе, с возможностью ее подключения к трубопроводу пневмораспределителя для раскрытия пакета путем поддува при повороте поворотной оси планки пакетозахвата от угла β на угол α, а устройство для закрепления пакета на питателе содержит два пневмоцилиндра, установленные соосно по бокам питателя на общем основании, на выходных валиках пневмоцилиндров закреплены прижимы с возможностью входа в соприкосновение с конусной частью питателя и фиксирования верхней части раскрытого пакета на нем, причем пневмоцилиндры через пневмораспределитель соединены с компрессором, при этом программный блок управления соединен с вакуумной установкой, пневмодвигателем и компрессором, который через пневмораспределитель связан с входами реверса пневмодвигателя, с пневмоцилиндрами и поворотной осью планки пакетозахвата.
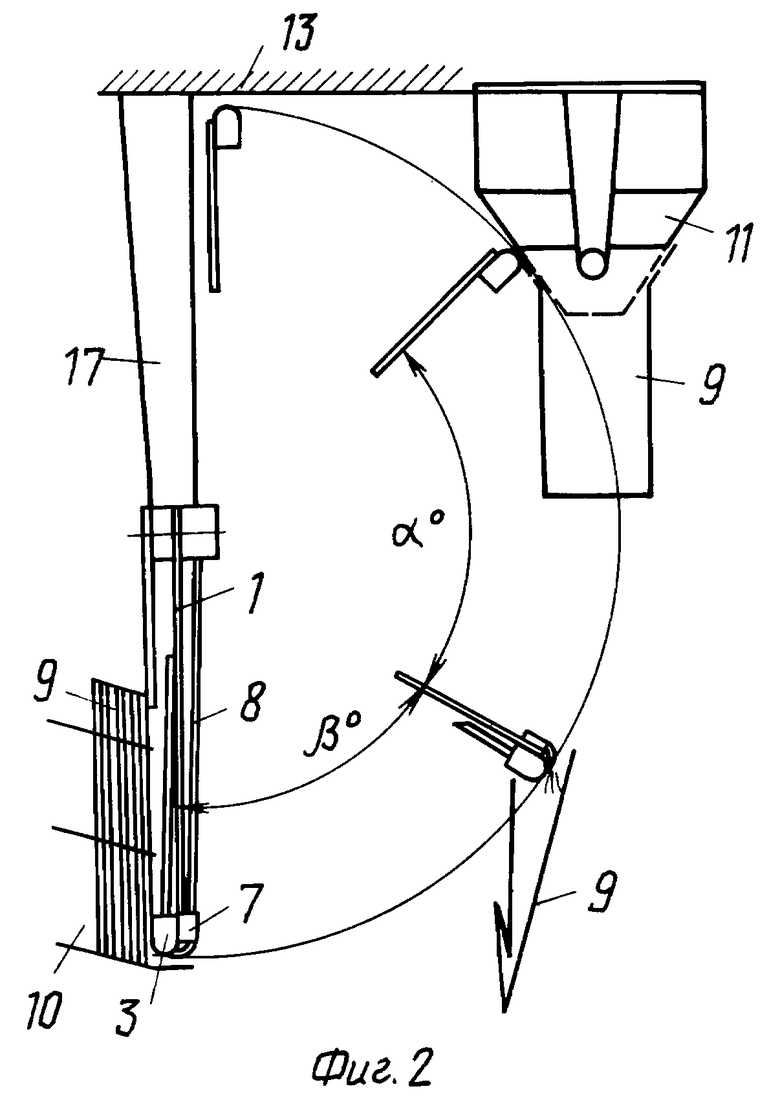
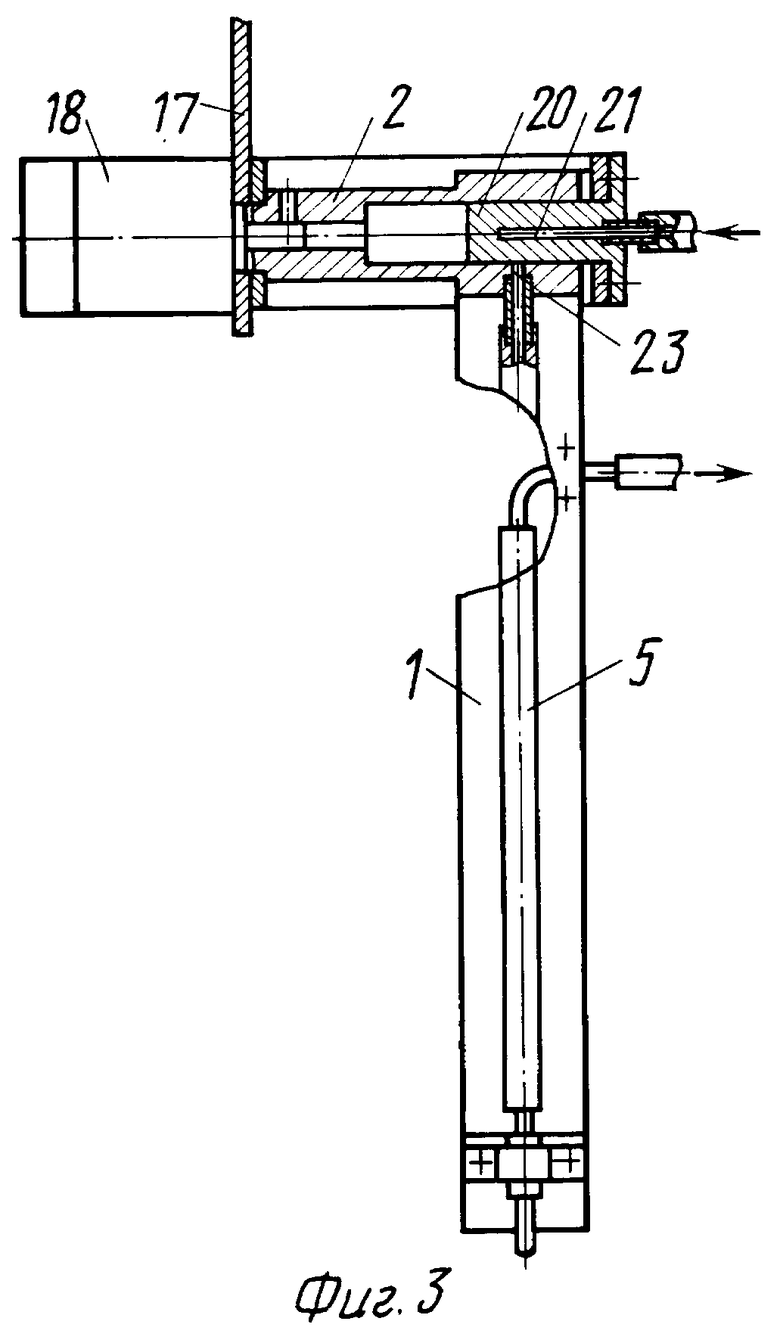
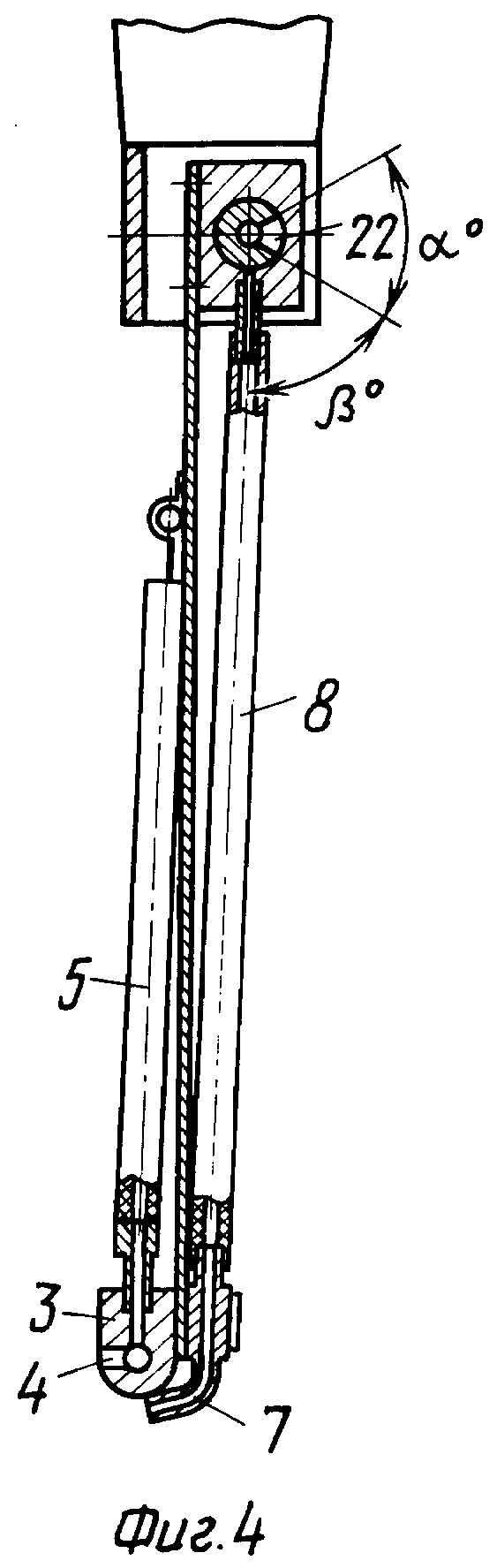
Изобретение поясняется чертежом, где на фиг. 1 представлен общий вид устройства, на фиг. 2 показан вид сбоку, на фиг.3 дана схема пакетозахвата, а на фиг.4 - схема пакетозахвата сбоку.
Устройство для навешивания пакетов для засыпки сыпучих продуктов с поштучным захватом пакетов (см. фиг. 1 и 2) содержит пакетозахват, состоящий из планки 1, одним концом закрепленной на поворотной оси 2, вакуумный присос 3 с отверстиями 4, соединенными через трубку 5 с вакуумной установкой 6, форсунку 7, установленную на вакуумном присосе 3 и через трубку 8 соединенную с отверстием в поворотной оси 2, пакеты 9, корзину 10 с уложенными пакетами, питатель 11, имеющий форму тонкостенного цилиндра, переходящего в усеченный конус, по обе стороны конусной части которого размещены два пневмоцилиндра 12 поршневого типа, смонтированные с питателем 11 на едином основании 13 и имеющие на концах выводных валиков прижимы 14. Поворотная ось 2 планки 1 пакетозахвата и пневмоцилиндры 12 электрически и трубопроводами соединены с вакуумной установкой 6 и через пневмораспределитель 15 - с компрессором 16. Поворотная ось 2 опирается одним концом на отверстие в кронштейне 17, закрепленном на основании 13, и связана с выходным валиком пневмодвигателя 18 роторного типа с углом разворота 180oC, входы реверса которого соединены с пневмораспределителем 15. Компрессор 16, вакуумная установка 6 и пневмодвигатель 18 управляются с выходов программного блока управления 19.
Другой конец поворотной оси 2 (см. фиг.3 и 4) установлен на фланце с цапфой 20, внутри которой выполнено продольное отверстие 21, соединенное с вырезом 22 в цапфе в виде сектора с углом α, с другой стороны соединенное с трубопроводом пневмораспределителя 15. Против выреза 22 в цапфе 20 в поворотной оси 2 в поперечной плоскости выполнено другое отверстие 23, соединенное трубкой 8 с форсункой 7.
Устройство работает следующим образом.
Рядом с пакетозахватом установлена корзина 10, в которую уложена пачка пакетов 9 таким образом, чтобы их донная часть находилась сверху, а разъемная часть - снизу и соприкасалась с вакуумным присосом 3 пакетозахвата, находящегося в исходном положении. По команде программного блока управления 19 в соответствии с заложенной программой включается вакуумная установка 6, через отверстия 4 вакуумного присоса 3 разъемная часть пакета 9 присасывается к вакуумному присосу 3. По команде программного блока управления 19 включается пневмодвигатель 18 и начинает разворачивать пакетозахват с пакетом 9 против часовой стрелки. За время разворота пакетозахвата на угол β пакет 9, удерживаемый за разъемную часть пакета вакуумным присосом 3, переворачивается донной частью вниз за счет собственного веса. В момент разворота планки 1 пакетозахвата на угол β сжатый воздух от пневмораспределителя 15 по трубопроводу через вырез 22 в цапфе 20 поступает через трубку 8 в форсунку 7 и раскрывает разъемные стенки пакета 9 таким образом, что при дальнейшем развороте планки 1 пакетозахвата на угол α пакет 9 подходит к конусной части питателя 11 и натягивается на нее. В этот момент сжатый воздух подается на два пневмоцилиндра 12, из которых выдвигаются валики с прижимами 14 и фиксируют пакет 9 на конусной части питателя 11. Цепи от вакуумной установки 6 к присосу 3 и от пнвмораспределителя 15 к форсунке 7 перекрываются. Планка 1 пакетозахвата продолжает разворот до своего крайнего положения (180o), а через питатель 11 в пакет 9 начинается засыпка продукта. Через время, отведенное на засыпку пакета 9 продуктом, по команде с программного блока управления 19 сжатый воздух с компрессора 16 через пневмораспределитель 15 подается одновременно на два пневмоцилиндра 12, при этом прижимы 14 освобождают заполненный пакет 9, который падает вниз для проведения с ним дальнейших операций по закрыванию и заклеиванию. Пакетозахват из крайнего положения разворачивается по часовой стрелке на 180o в исходное положение до соприкосновения его вакуумного присоса 3 со следующим пакетом, после чего операции повторяются.
Предложенное устройство обеспечивает автоматический процесс фасовки сыпучих продуктов от захвата пакета до его заполнения простыми средствами.
Изобретение относится к расфасовочно-упаковочному оборудованию и предназначено для использования в пищевой отрасли народного хозяйства, в частности для фасовки сыпучих продуктов. Устройство содержит корзину пакетов, расположенных закрытым концом вверх, пакетозахват, устройство для передачи пакета к питателю, вакуумный присос и вакуумную установку. Оно снабжено устройством для закрепления пакета на питателе, компрессором, пневмораспределителем и программным блоком управления. Устройство для передачи пакетов к питателю представляет собой пневмодвигатель роторного типа с углом разворота 180° в вертикальной плоскости. Пакетозахват выполнен в виде планки, одним концом закрепленной на поворотной оси, связанной с выходным валиком пневмодвигателя. На другом конце планки установлен вакуумный присос, соединенный с вакуумной установкой. При повороте планки на угол β = 180°-α происходит разворот пакета на 180° донной частью вниз. Другой конец поворотной оси установлен на фланце с цапфой, внутри которой выполнено продольное отверстие, соединенное с вырезом в цапфе в виде сектора с углом α, с другой стороны связанное с трубопроводом пневмораспределителя. Против выреза в цапфе в поворотной оси в поперечной плоскости выполнено другое отверстие, соединенное трубкой с форсункой, закрепленной на вакуумном присосе для раскрытия пакета путем поддува. Устройство имеет простую конструкцию и удобно в работе. 2 з.п. ф-лы, 4 ил.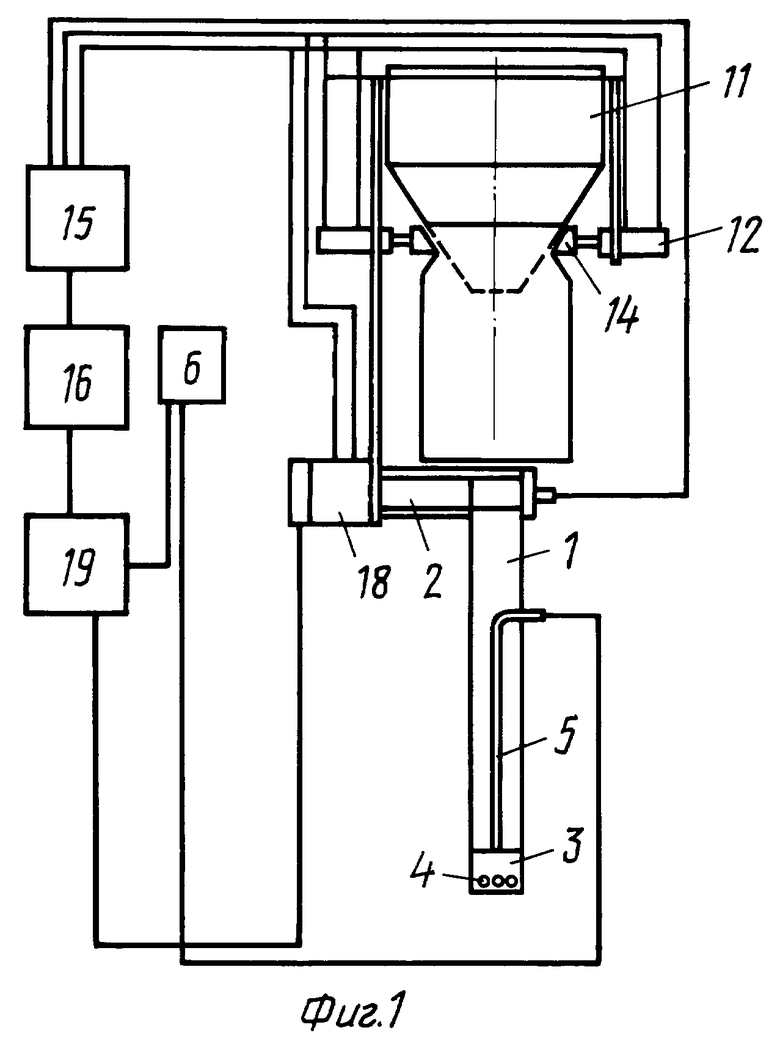
2. Устройство по п.1, отличающееся тем, что устройство для закрепления пакета на питателе содержит два пневмоцилиндра, установленные соосно по бокам питателя на общем основании с ним, на выходных валиках пневмоцилиндров установлены прижимы с возможностью входа в соприкосновение с конусной частью питателя и фиксирования на нем верхней части раскрытого пакета, причем пневмоцилиндры через пневмораспределитель соединены с компрессором.
| УСТРОЙСТВО ДЛЯ НАВЕШИВАНИЯ МЕШКОВ ДЛЯ ЗАСЫПКИ СЫПУЧИХ ПРОДУКТОВ С ПОШТУЧНЫМ ЗАХВАТОМ МЕШКОВ | 1992 |
|
RU2054364C1 |
| Способ получения метилэтилкетона | 1976 |
|
SU583117A1 |

