Изобретение относится к устройству управляемого ракетного аппарата на жидком топливе, конкретно - аппарата с несколькими реактивными камерами, смонтированными в шарнирных подвесах.
Известен управляемый многокамерный ракетный аппарат на жидком топливе, содержащий корпус с топливными баками окислителя и горючего, силовую установку из нескольких реактивных камер, одноосные шарнирные подвесы для монтажа камер на ракетном аппарате с возможностью их поворота в целях управления полетом и обеспечивающие поворот рулевые машины (см. Космонавтика: Энциклопедия, M., 1985, c. 307 (ст. "Протон"), с. 414 (рис. 2б) - прототип изобретения).
Такие аппараты, применяемые в технике баллистических и космических ракет, отличаются простотой устройства благодаря использованию в целях управления полетом реактивных камер, смонтированных в одноосных (одностепенных) шарнирных подвесах. Оси подвесов ориентированы перпендикулярно продольной оси аппарата, пересекаясь на ней, что позволяет управлять полетом аппарата по всем каналам - тангажу, рысканью и крену - путем поворота (отклонения) камер от номинального положения. Для этого в аппарате предусмотрены рулевые машины (обычно гидравлического типа) - по одной на поворотную камеру. При своей простоте известный аппарат имеет, однако, существенный недостаток, который проявляется при необходимости разновременного выключения отдельных камер в полете. Эта необходимость может обусловливаться следующими факторами: а) отказ какой-то из камер либо связанной с ней рабочей системы (например, подачи топлива); б) допустимый - по условиям сохранности полезного груза и безопасности экипажа - уровень полетной перегрузки. При выключении одной и более камер продолжение полета для известного аппарата становится весьма затруднительным либо вообще невозможным ввиду появления больших возмущений по каналам управления.
Предлагаемое изобретение решает техническую задачу обеспечения управляемого полета ракетного аппарата при частичном выключении реактивных камер.
Поставленная техническая задача решается тем, что в управляемом многокамерном ракетном аппарате на жидком топливе, содержащем корпус с топливными баками окислителя и горючего, силовую установку из нескольких реактивных камер, одноосные шарнирные подвесы для монтажа камер на ракетном аппарате с возможностью их поворота в целях управления полетом и обеспечивающие поворот рулевые машины, согласно изобретению ось шарнирного подвеса расположена перпендикулярно плоскости, проходящей через продольные оси аппарата и соответствующей камеры, что обеспечивает управление полетом по тангажу и рысканью, а для управления по крену аппарат снабжен реактивными соплами.
При осуществлении изобретения ожидается технический результат, совпадающий с существом решаемой задачи.
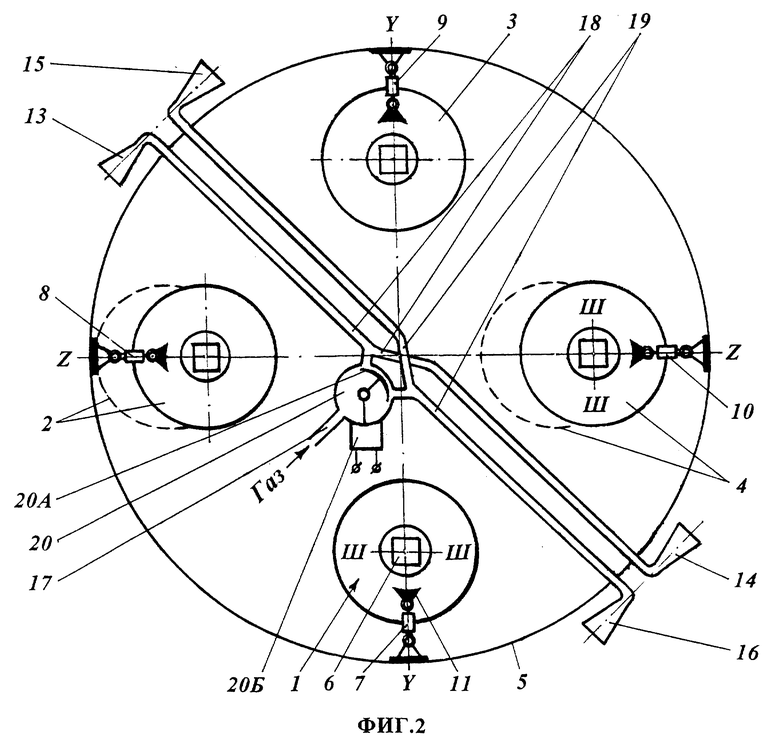
Изобретение поясняется при помощи фиг. 1, 2 и 3, на которых схематично показаны предлагаемый ракетный аппарат в виде на силовую установку спереди (фиг. 1) и сверху (фиг. 2), и изображена реактивная камера в составе силовой установки с турбонасосной подачей топлива (фиг. 3).
Представленный на фиг. 1, 2 ракетный аппарат содержит четыре одинаковых реактивных камеры 1, 2, 3, 4 типичной для жидкостно-ракетного двигателя (ЖРД) конструкции, которая включает цилиндрическую камеру сгорания 1А и сверхзвуковое сопло 1Б. Камеры расположены симметрично относительно продольной оси аппарата Х-Х в хвостовой части корпуса 5, будучи смонтированы в одноосных (одностепенных) шарнирных подвесах 6. Их оси Ш-Ш лежат в поперечной плоскости аппарата, причем две из осей параллельны плоскости тангажа Y-Y, а две другие параллельны плоскости рысканья Z-Z. Для осуществления поворота камер вокруг своих шарнирных осей предусмотрены гидравлические рулевые машины 7, 8, 9, 10. Рулевая машина крепится шарнирно к предусмотренному на камере кронштейну 11 и к шпангоуту 12 хвостового отсека аппарата.
Ось Ш-Ш шарнирного подвеса расположена перпендикулярно плоскости, проходящей через продольные оси аппарата и соответствующей камеры, что обеспечивает управление полетом по тангажу и рысканью (см. ниже), а для управления по крену аппарат снабжен двумя периферийными парами сопел крена (13-14) и (15-16), которые рассчитаны на попеременную работу с созданием вращательного момента сил относительно оси Х-Х в противоположных направлениях. С этой целью сопла подключены к источнику рабочего газа посредством магистралей 17, 18, 19 через клапан-распределитель 20. Он имеет рабочий орган в виде заслонки 20А, снабженной реверсивным электроприводом 20Б. При его обесточенности заслонка разобщает питающую газовую магистраль 17 и сопла крена.
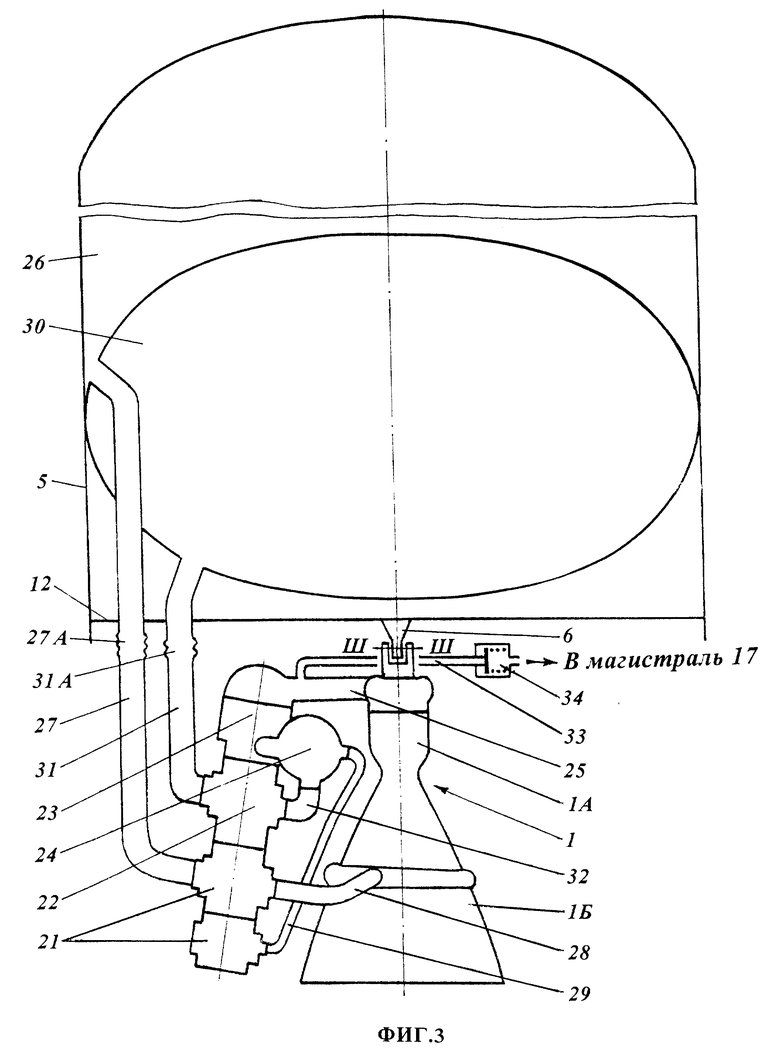
Фиг. 3 отражает типичное устройство предлагаемого аппарата с реактивными камерами, питаемыми от индивидуальных турбонасосных агрегатов (ТНА). Они в совокупности с камерами образуют связки из нескольких ЖРД - по числу камер. На фиг. 3 представлен в составе силовой установки один такой ЖРД (из общего числа 4), которому соответствует камера 1 на фиг. 1, 2. В питающий камеру ТНА входят смонтированные соосно двухступенчатый центробежный насос горючего (например, сжиженный метан) 21, центробежный насос окислителя (например, сжиженный кислород) 22 и осевая газовая турбина 23. Она рассчитана на привод рабочим газом, который вырабатывается в газогенераторе 24 при сжигании расходуемого двигателем окислителя и части горючего. С газогенератором рабочий тракт турбины соединен на входе, а на выходе он соединен посредством выхлопного патрубка (газовода) 25 с форсуночной головкой камеры 1 в целях подачи отработавшего (в данном примере - окислительного) генераторного газа в рабочее пространство камеры на дожигание с остальной частью горючего. Оно хранится в переднем баке 26 ракетного аппарата, соединенном посредством питающего трубопровода 27 с насосом 21. Из первой его ступени основная часть горючего (например, 90% общего расхода) подается по трубопроводу 28 в охлаждающую рубашку камеры, пройдя которую, подогретое горючее поступает к форсункам. Остальное горючее (10%) подается второй ступенью насоса по напорному трубопроводу 29 в газогенератор. Подача окислителя в двигатель предусмотрена из заднего бака 30, который подключен питающим трубопроводом 31 к входу насоса 22. Из него окислитель поступает по напорному трубопроводу 32 в газогенератор.
На форсуночной головке камеры смонтирован вышеупомянутый шарнирный подвес 6. На уровне его размещения трубопроводы 27 и 31 снабжены сильфонными компенсаторами перемещений 27А и 31А соответственно. Посредством трубопровода 33 с обратным клапаном 34 выхлопной патрубок 25 подсоединен к вышеупомянутой магистрали 17 (фиг. 2), которая питает сопла крена.
Работа отдельного ЖРД понятна из представленного описания, а ракетный аппарат функционирует следующим образом (см. фиг. 1,2). Предположим, что необходимо изменить направление полет по рысканью. Для этого производят согласованное отклонение двух противоположных камер 2 и 4 в нужную сторону, например сопловой частью влево: новое положение камер показано штриховыми линиями. В этом конкретном примере шток рулевой машины 8 укорачивается, а шток машины 10 удлиняется. Для управления по тангажу подобным образом отклоняют реактивные камеры 1 и 3. Для управления по крену включают пару сопел (13-14) или (15-16), для чего воздействуют на клапан 20, сообщая нужную пару сопел с питающей магистралью 17.
Предположим теперь, что в полете вышла из строя одна из четырех камер ракетного аппарата, например камера 1. B этом случае ее (соответствующий ЖРД) выключают, и оставшиеся камеры форсируют по тяге до уровня, обеспечивающего выполнение полетного задания. Одновременно с выключением камеры 1 - во избежание опрокидывания аппарата по тангажу - камеру 3 отклоняют в шарнирном подвесе до положения, при котором ось камеры проходит через центр масс аппарата. Далее управление полетом по тангажу производят поворотом в шарнирном подвесе камеры 3, в то время как управление по другим каналам осуществляют прежним образом. При этом сопла крена отключены от рабочего тракта неработающей камеры 1 благодаря автоматическому закрытию соответствующего обратного клапана 34. Одна камера может выключаться и в штатной ситуации, а именно при необходимости существенного дросселирования силовой установки в целях ограничения полетной перегрузки. Эта ситуация является типичной для космических ракетоносителей.
В описанном ракетном аппарате с четырьмя поворотными камерами управление полетом обеспечивается также при выключении двух камер: одной в плоскости тангажа и одной в плоскости рысканья. В этом случае обе оставшиеся работающие камеры отклоняют до совмещения их осей с центром масс аппарата. Очевидно, что суммарная тяга двух камер вдвое меньше первоначальной, номинальной, тяги силовой установки. Если же обе работающие камеры задросселировать на 50% (что допустимо для реального ЖРД), то результирующее значение тяги силовой установки составит всего 25% от номинальной величины. Столь глубокое дросселирование для одиночного ЖРД с турбонасосной подачей топлива является недостижимым.
Технический результат от изобретения становится очевидным при сравнении конкретного описанного ракетного аппарата с аналогичным известным, в котором оси шарнирных подвесов расположены в плоскостях Y-Y и Z-Z. При таком устройстве выключение камеры 1 вызывает необходимость в совместном отклонении камер 2, 4 соплами вверх на фиг. 2 (иначе аппарат опрокинется в плоскости тангажа). Далее продолжение полета становится проблематичным, поскольку при повороте камер 2, 4 для управления по тангажу или камеры 3 для управления по рысканью возникают возмущения по двум другим каналам.
Возможность продолжения полета при выключении части камер ракетного аппарата является техническим результатом от выполнения изобретения. Указанная возможность может реализоваться в аварийной и штатной ситуациях. Очевидно, что в предлагаемом ракетном аппарате устройство шарнирных подвесов должно обеспечивать "доворот" камер до совмещения их осей с центром масс аппарата. Для типичной конструкции космического ракетоносителя угол "доворота" оценен нами в ≈7o.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИЛОВАЯ УСТАНОВКА УПРАВЛЯЕМОГО РАКЕТНОГО АППАРАТА НА ЖИДКОМ ТОПЛИВЕ | 1999 |
|
RU2163304C1 |
| ДВИГАТЕЛЬ ДЛЯ РАКЕТНОЙ СИЛОВОЙ УСТАНОВКИ ЖИДКОГО ТОПЛИВА (ВАРИАНТЫ) | 1996 |
|
RU2119081C1 |
| ДВИГАТЕЛЬНАЯ УСТАНОВКА ЛЕТАТЕЛЬНОГО АППАРАТА | 1995 |
|
RU2089743C1 |
| МНОГОСТУПЕНЧАТАЯ РАКЕТА | 1994 |
|
RU2088787C1 |
| СПОСОБ ЗАПУСКА ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ И ЖИДКОСТНОЙ РАКЕТНЫЙ ДВИГАТЕЛЬ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1994 |
|
RU2084677C1 |
| ДРОССЕЛИРУЕМЫЙ КИСЛОРОДНО-УГЛЕВОДОРОДНЫЙ ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ ВОССТАНОВИТЕЛЬНОГО ГАЗА | 2002 |
|
RU2238423C2 |
| МНОГОСТУПЕНЧАТАЯ РАКЕТА | 1994 |
|
RU2086795C1 |
| СПОСОБ РАБОТЫ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ С ТУРБОНАСОСНОЙ ПОДАЧЕЙ КИСЛОРОДНО-МЕТАНОВОГО ТОПЛИВА | 1999 |
|
RU2166661C1 |
| СПОСОБ РАБОТЫ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ С ТУРБОНАСОСНОЙ ПОДАЧЕЙ КИСЛОРОДНО-МЕТАНОВОГО ТОПЛИВА | 2001 |
|
RU2209993C2 |
| ШАРНИРНЫЙ ПОДВЕС ДЛЯ УСТАНОВКИ РЕАКТИВНОЙ КАМЕРЫ НА ЛЕТАТЕЛЬНОМ АППАРАТЕ | 1995 |
|
RU2090773C1 |
Управляемый многокамерный ракетный аппарат на жидком топливе содержит корпус с топливными баками окислителя и горючего, силовую установку из нескольких реактивных камер, одноосные шарнирные подвесы для монтажа камер на ракетном аппарате с возможностью их поворота в целях управления полетом и обеспечивающие поворот рулевые машины. Ось шарнирного подвеса расположена перпендикулярно плоскости, проходящей через продольные оси аппарата и соответствующей камеры, что обеспечивает управление полетом по тангажу и рысканью. Для управления по крену аппарат снабжен реактивными соплами. Такое выполнение ракетного аппарата обеспечивает его управляемый полет при частичном выключении реактивных камер. 3 ил.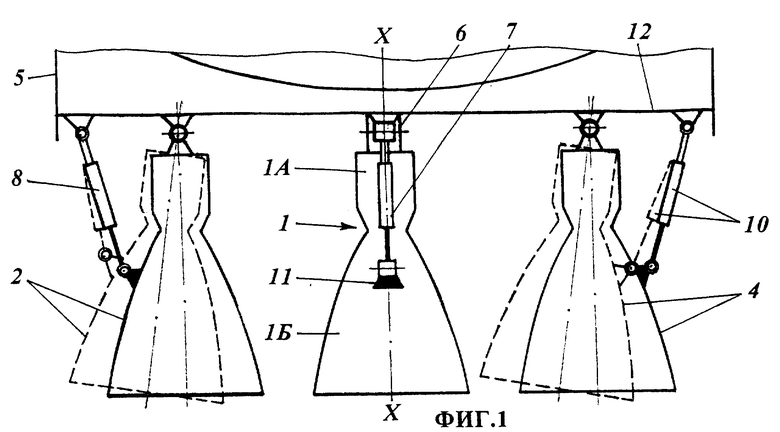
Управляемый многокамерный ракетный аппарат на жидком топливе, содержащий корпус с топливными баками окислителя и горючего, силовую установку из нескольких реактивных камер, одноосные шарнирные подвесы для монтажа камер на ракетном аппарате с возможность их поворота в целях управления полетом и обеспечивающие поворот рулевых машин, отличающийся тем, что ось шарнирного подвеса расположена перпендикулярно плоскости, проходящей через продольные оси аппарата и соответствующей камеры, что обеспечивает управление полетом по тангажу и рысканью, а для управления по крену аппарат снабжен реактивными соплами.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патрон для ламп накаливания | 1923 |
|
SU898A1 |

