Изобретение относится к силовым установкам (СУ) управляемых ракетных аппаратов на жидком топливе, конкретно - к СУ с несколькими реактивными камерами, смонтированными в двухстепенных шарнирных подвесах для возможности управления вектором тяги.
Известна СУ управляемого ракетного аппарата на жидком топливе, включающая несколько реактивных камер с расположением их вокруг продольной оси аппарата, двухстепенные шарнирные подвесы для монтажа камер на аппарате с возможностью их поворота в целях управления вектором тяги и осуществляющие поворот рулевые машины с концевыми шарнирами крепления к камерам и корпусу аппарата: Dieter K.Huzel and David H.Huang. Modern Engineering for Design of Liquid-Propellant Rocket Engines. Progress in Astronautics and Aeronautics. Vol. 147. 1992. P. 363 (прототип изобретения).
Подобные СУ, характерные для современных баллистических и космических ракет на жидком топливе, позволяют управлять полетом аппарата по тангажу, рысканью и крену за счет поворота (отклонения) реактивных камер от номинального положения, который осуществляется при помощи индивидуальных рулевых машин (обычно гидравлического типа). На каждую камеру СУ приходятся две рулевые машины, оси которых проходят через центр двухстепенного (обычно карданного) шарнирного подвеса, образуя две взаимно перпендикулярные плоскости, ориентированные в направлении плоскостей тангажа и рысканья. При всей эффективности известная СУ имеет существенный недостаток: ввиду несогласованных перемещений отдельных камер возможно их встречное движение, и во избежание соударений камер (сопловыми частями) между ними необходимо предусматривать дополнительные монтажные зазоры, что увеличивает диаметральный габарит СУ.
Изобретение направлено на устранение присущего прототипу недостатка, то есть решает следующую техническую задачу: разработать СУ с несколькими подвижно установленными реактивными камерами, которая обеспечивает эффективное управление полетом аппарата при меньшем диаметральном габарите СУ. Поставленная техническая задача решается тем, что в СУ управляемого ракетного аппарата на жидком топливе, включающей несколько реактивных камер с расположением их вокруг продольной оси аппарата, двухстепенные шарнирные подвесы для монтажа камер на аппарате с возможностью их поворота в целях управления вектором тяги и осуществляющие поворот рулевые машины с концевыми шарнирами крепления к камерам и корпусу аппарата, - согласно изобретению, - каждая камера соединена с двумя соседними посредством тяг с концевыми шарнирами, оба из которых являются шаровыми либо один является шаровым, а другой двухстепенным, причем отрезки между центрами шарниров тяги равны и параллельны отрезкам между центрами подвесов соединяемых камер, а число рулевых машин равно числу камер, так что на каждую приходится одна рулевая машина с шаровыми и/или двухстепенными концевыми шарнирами.
При осуществлении изобретения ожидается технический результат, совпадающий с существом решаемой задачи.
Изобретение поясняется при помощи фиг. 1-6, на которых показана схематично предлагаемая СУ - спереди и в плане:
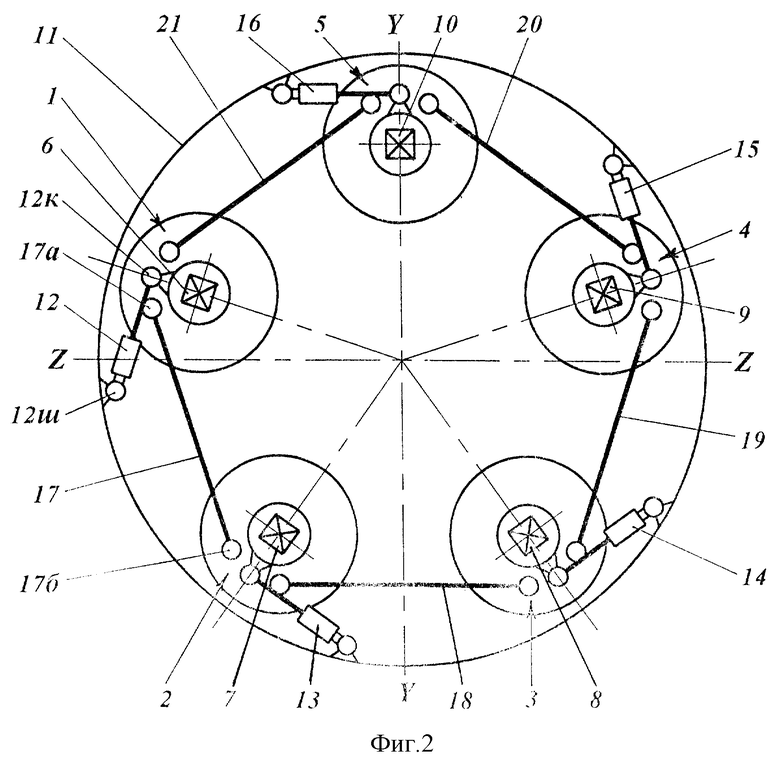
на фиг.1,2 - в нейтральном положении камер;
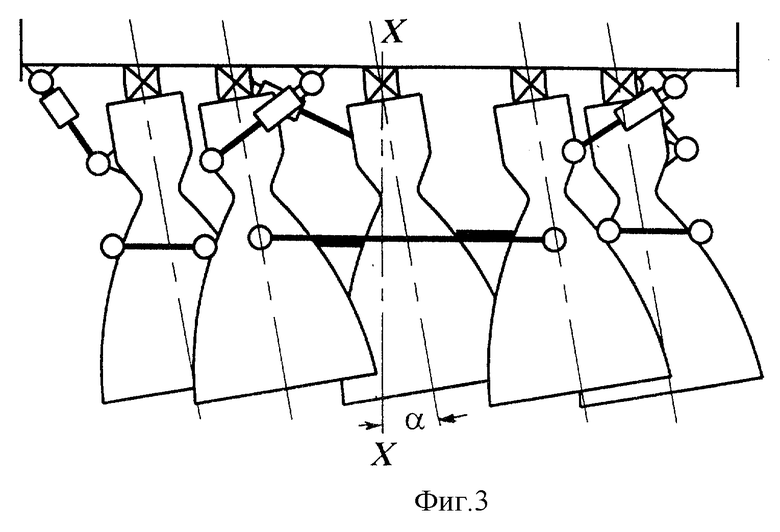
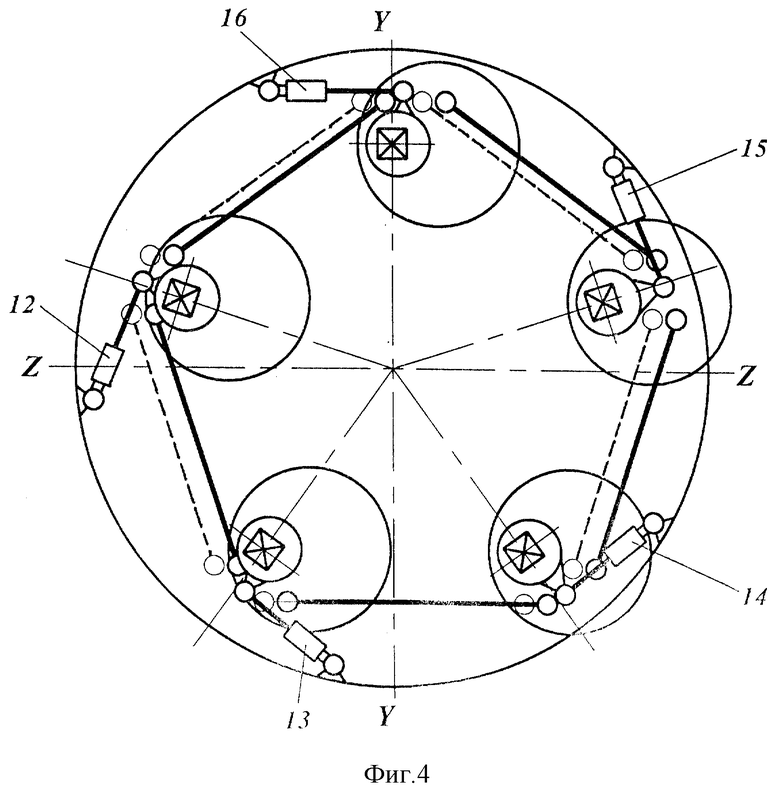
на фиг.3,4 - в положении при управлении по каналу рысканья;
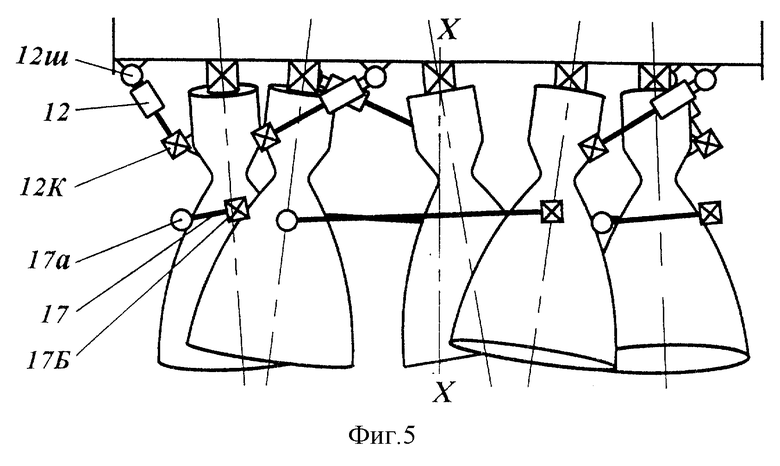
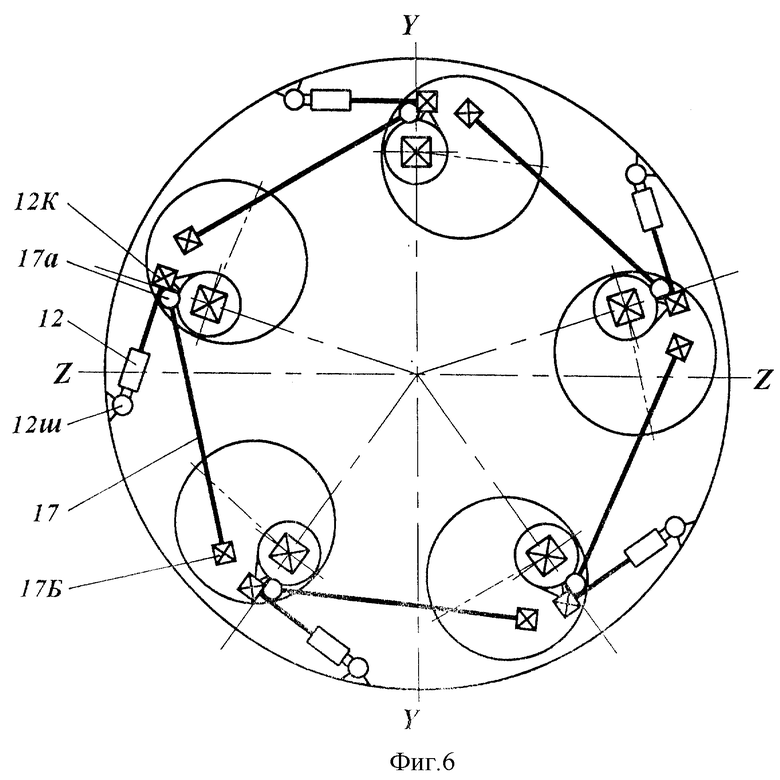
на фиг. 5,6 - в положении при управлении по каналу крена.
СУ, представленная на фиг. 1 и 2, содержит пять одинаковых реактивных камер 1 - 5 типичной для жидкостно-ракетного двигателя (ЖРД) конструкции, которая включает цилиндрическую камеру сгорания la и сверхзвуковое сопло 1б. Камеры расположены в хвостовой части ракетного аппарата, вокруг его продольной оси X - X, образуя осесимметричную в плане конфигурацию. Монтаж камер осуществлен посредством двухстепенных шарнирных подвесов 6-10, соединяющих головки камер со шпангоутом 11 (то есть с корпусом) ракетного аппарата. Конструкция подвесов типична для ЖРД и обеспечивает передачу тяги на корпус аппарата с возможностью поворота камеры в двух взаимно перпендикулярных плоскостях. Поворот осуществляется посредством гидравлических рулевых машин 12-16 (по одной на камеру). Рулевая машина крепится посредством шаровых концевых шарниров 12к и 12ш к соответствующей камере и шпангоуту 11. Каждая камера соединена с двумя соседними посредством тяг 17-21 с шаровыми концевыми шарнирами 17а, 17б. Отрезки между центрами этих шарниров равны и параллельны отрезкам между центрами подвесов соединяемых камер: например, отрезок 17а - 17б равен и параллелен отрезку 6 - 7. Всего тяг - пять, по числу камер. Камеры вместе с соответствующими тягами и рулевыми машинами образуют осесимметричный в плане механизм.
Описанная СУ функционирует следующим образом. Предположим, что необходимо изменить направление полета аппарата по рысканью. Для этого производится поворот в плоскости рысканья Z-Z всех камер 1-5 на угол α, например, сопловой частью вправо, фиг. 3,4; прежнее положение соединительных межкамерных тяг показано штриховыми линиями. В этом конкретном примере штоки рулевых машин 12,15,16 по-разному удлиняются, а штоки машин 13,14 по-разному укорачиваются. Для управления по тангажу осуществляют аналогичный поворот камер в плоскости тангажа Y - Y. Управление по крену достигается одинаковым поворотом камер вокруг оси X - X: например, соплами по часовой стрелке - см. фиг. 5,6. При этом тяги взаимно перекрещиваются, а рулевые машины одинаково удлиняются. Как можно видеть из чертежей, камеры при повороте в индивидуальных шарнирных подвесах перемещаются относительно одна другой, а соединительные тяги занимают новое положение в пространстве и относительно камер. В отличие от фиг. 1 - 4, СУ на фиг. 5,6 содержит рулевые машины, у которых один концевой шарнир (12ш) является по-прежнему шаровым, но другой (12К) выполнен двухстепенным (например, карданным); у соединительных тяг также один из шарниров является шаровым (17а), а другой (17Б) - двухстепенным (например, карданным).
Благодаря устройству СУ в виде предложенного кинематического механизма заданное конкретное изменение длины конкретных рулевых машин СУ вызывает вполне однозначное движение камер независимо от их количества. Чтобы доказать это, запишем кинематическую структурную формулу применительно к предложенной СУ - для случая произвольного числа камер:
W = 6n-4p4-3p3,
где W - число степеней свободы СУ;
n - число кинематических звеньев (слагается из камер, тяг и состоящих из двух взаимно подвижных частей рулевых машин);
p4 - число кинематических пар четвертого класса (двухстепенные шарнирные узлы и гидравлические рулевые машины);
p3 - число кинематических пар третьего класса (шаровые шарниры).
Предложенная СУ содержит равное число камер, тяг и рулевых машин, которое обозначим как N. Тогда n = 4N.
Для СУ типа показанной на фиг. 1-4 (с концевыми шарнирами рулевых машин и соединительных тяг исключительно шарового типа) p4 = 2N, p3 = 4N, и следовательно: W = 24N-8N-12N=4N.
Из этого результата необходимо вычесть 3N - число степеней свободы, связанное с возможным вращением относительно собственных осей штоков гидравлических рулевых машин, корпусов рулевых машин и соединительных тяг; указанные вычитаемые движения являются внутренними для механизма СУ, не влияющими на положение СУ относительно корпуса ракетного аппарата. В итоге получаем: W = N.
В СУ типа показанной на фиг. 5,6 (с шаровыми и двухстепенными концевыми шарнирами) p4 = 4N, p3 = 2N, и следовательно: W=24N-16N-6N=2N.
Из этого результата необходимо вычесть N - число степеней свободы, связанное с возможным вращением относительно собственных осей корпусов рулевых машин. В итоге получаем W = N.
Такой же результат получается, если в рулевой машине различные концевые шарниры поменять местами или оба шарнира выполнить двухстепенными; эти признаки также составляют сущность нашего изобретения.
Тот факт, что число степеней свободы предложенной СУ совпадает с числом содержащихся в ней рулевых машин и камер, независимо от их числа, означает, что движение камер (являющихся выходными кинематическими звеньями механизма СУ) однозначно определяется движением рулевых машин (входные звенья). На практике это означает, что конкретным изменением длины конкретных рулевых машин можно обеспечить любое необходимое положение камер СУ в целях управления полетом. Возможность соударений между камерами совершенно исключена, что позволяет осуществить их максимально плотную компоновку в СУ - с минимальными монтажными зазорами. Выполненный нами примерный анализ компоновки СУ для перспективного ракетоносителя с четырьмя камерами типа используемых на второй ступени российского носителя "ЗЕНИТ" показал, что выигрыш в диаметральном габарите СУ при осуществлении изобретения достигает 20%. Таким образом, ожидаемый технический результат от осуществления изобретения подтвержден.
Наряду с этим достигаются и другие важные технические результаты. Прежде всего уменьшается количество рулевых машин в СУ, что весьма ее упрощает, облегчает и удешевляет. Далее исключается присущий СУ-прототипу "паразитный" поворот камер в индивидуальных шарнирных подвесах на угол, превышающий в  раз предельный поворот в одной плоскости. (Это неизбежно происходит в СУ-прототипе при одновременном повороте камеры в обеих плоскостях двухстепенного подвеса, в связи с чем "гибкие" элементы конструкции СУ-прототипа должны проектироваться с соответствующими запасами, а в конструкции ракетного аппарата появляются усложняющие и утяжеляющие его механические ограничительные устройства). Важным дополнительным результатом от осуществления изобретения является также полная симметрия механизма СУ - с любым числом камер - относительно продольной оси ракетного аппарата X - X. Эта симметрия (наблюдаемая в СУ-прототипе лишь при четырех камерах) позволяет осуществить одинаковую разводку питающих топливных магистралей на ракетном аппарате и унифицировать конструкцию входящих в СУ двигательных модулей.
раз предельный поворот в одной плоскости. (Это неизбежно происходит в СУ-прототипе при одновременном повороте камеры в обеих плоскостях двухстепенного подвеса, в связи с чем "гибкие" элементы конструкции СУ-прототипа должны проектироваться с соответствующими запасами, а в конструкции ракетного аппарата появляются усложняющие и утяжеляющие его механические ограничительные устройства). Важным дополнительным результатом от осуществления изобретения является также полная симметрия механизма СУ - с любым числом камер - относительно продольной оси ракетного аппарата X - X. Эта симметрия (наблюдаемая в СУ-прототипе лишь при четырех камерах) позволяет осуществить одинаковую разводку питающих топливных магистралей на ракетном аппарате и унифицировать конструкцию входящих в СУ двигательных модулей.
Благодаря совокупности всех указанных технических результатов изобретение позволяет реализовать любые желаемые компоновки многокамерных СУ, максимально используя располагаемую площадь хвостового отсека ракетного аппарата, при гарантии эффективного управления полетом.
В рамках существа изобретения местоположение монтажного шарнирного подвеса относительно камеры может быть различным - в соответствии с современной техникой ЖРД. Питание камер топливом может осуществляться от вытеснительной либо турбонасосной системы подачи, причем турбонасосный агрегат может отклоняться в шарнирном подвесе вместе с камерой или монтироваться неподвижно относительно корпуса аппарата. Применяемые рулевые машины не ограничиваются только гидравлическим типом (например, в рамках изобретения может использоваться электромеханический привод).
Наибольшая эффективность изобретения проявляется в применении к космическим ракетоносителям большой грузоподъемности, оснащенным СУ с многими реактивными камерами.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЯЕМЫЙ МНОГОКАМЕРНЫЙ РАКЕТНЫЙ АППАРАТ НА ЖИДКОМ ТОПЛИВЕ | 1999 |
|
RU2156874C1 |
| ДВИГАТЕЛЬ ДЛЯ РАКЕТНОЙ СИЛОВОЙ УСТАНОВКИ ЖИДКОГО ТОПЛИВА (ВАРИАНТЫ) | 1996 |
|
RU2119081C1 |
| ДВИГАТЕЛЬНАЯ УСТАНОВКА ЛЕТАТЕЛЬНОГО АППАРАТА | 1995 |
|
RU2089743C1 |
| ШАРНИРНЫЙ ПОДВЕС ДЛЯ УСТАНОВКИ РЕАКТИВНОЙ КАМЕРЫ НА ЛЕТАТЕЛЬНОМ АППАРАТЕ | 1995 |
|
RU2090773C1 |
| КОЛЬЦЕВОЕ РЕАКТИВНОЕ СОПЛО ИЗМЕНЯЕМОЙ ГЕОМЕТРИИ | 1999 |
|
RU2150600C1 |
| МНОГОСТУПЕНЧАТАЯ РАКЕТА | 1994 |
|
RU2088787C1 |
| СПОСОБ ЗАПУСКА ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ И ЖИДКОСТНОЙ РАКЕТНЫЙ ДВИГАТЕЛЬ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1994 |
|
RU2084677C1 |
| СПОСОБ РАБОТЫ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ С ТУРБОНАСОСНОЙ ПОДАЧЕЙ КИСЛОРОДНО-МЕТАНОВОГО ТОПЛИВА | 2001 |
|
RU2209993C2 |
| ДРОССЕЛИРУЕМЫЙ КИСЛОРОДНО-УГЛЕВОДОРОДНЫЙ ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ ВОССТАНОВИТЕЛЬНОГО ГАЗА | 2002 |
|
RU2238423C2 |
| СПОСОБ РАБОТЫ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ С ТУРБОНАСОСНОЙ ПОДАЧЕЙ КИСЛОРОДНО-МЕТАНОВОГО ТОПЛИВА | 1999 |
|
RU2166661C1 |
Силовая установка управляемого ракетного аппарата на жидком топливе включает несколько реактивных камер с расположением их вокруг продольной оси аппарата, двухстепенные шарнирные подвесы для монтажа камер на аппарате с возможностью их поворота в целях управления вектором тяги и осуществляющие поворот рулевые машины с концевыми шарнирами крепления к камерам и корпусу аппарата. Каждая камера соединена с двумя соседними посредством тяг с концевыми шарнирами. Оба концевых шарнира являются шаровыми, либо один является шаровым, а другой двухстепенным, отрезки между центрами шарниров тяги равны и параллельны отрезкам между центрами подвесов соединяемых камер. Число рулевых машин равно числу камер, так что на каждую приходится одна рулевая машина с шаровым и/или двухстепенным концевым шарнирами. Предложенное изобретение позволяет уменьшить диаметральный габарит силовой установки. 6 ил.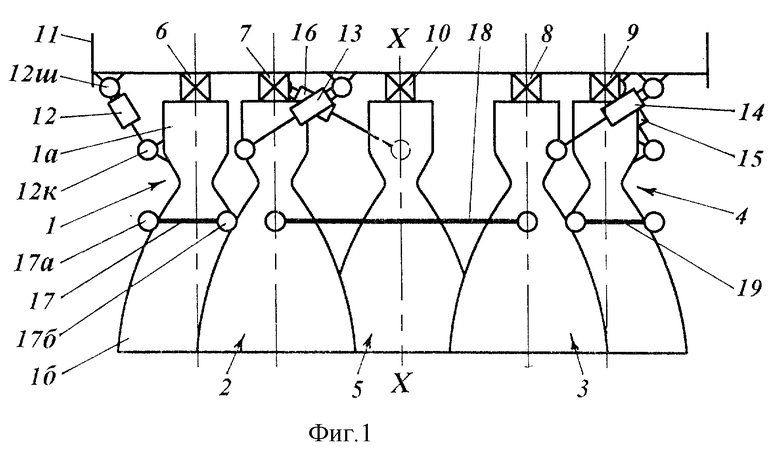
Силовая установка управляемого ракетного аппарата на жидком топливе, включающая несколько реактивных камер с расположением их вокруг продольной оси аппарата, двухстепенные шарнирные подвесы для монтажа камер на аппарате с возможностью их поворота в целях управления вектором тяги и осуществляющие поворот рулевые машины с концевыми шарнирами крепления к камерам и корпусу аппарата, отличающаяся тем, что каждая камера соединена с двумя соседними посредством тяг с концевыми шарнирами, оба из которых являются шаровыми либо один является шаровым, а другой двухстепенным, причем отрезки между центрами шарниров тяги равны и параллельны отрезкам между центрами подвесов соединяемых камер, а число рулевых машин равно числу камер, так что на каждую приходится одна рулевая машина с шаровыми и/или двухстепенными концевыми шарнирами.
| D | |||
| HUZEL and D | |||
| HUANG | |||
| Modern Engineering for Design of Liguid-Propellant Rocket Engines | |||
| Progress in Astronauties and Aeronautics | |||
| Раздвижной паровозный золотник со скользящими по его скалке поршнями и упорными для них шайбами | 1922 |
|
SU147A1 |
| РАКЕТНО-КОСМИЧЕСКИЙ АППАРАТ МНОГОРАЗОВОГО ИСПОЛЬЗОВАНИЯ | 1993 |
|
RU2046737C1 |
| ЖИДКОСТНАЯ РАКЕТНАЯ ДВИГАТЕЛЬНАЯ УСТАНОВКА | 1998 |
|
RU2136935C1 |
| US 3146589 А, 01.09.1964 | |||
| US 3127589 А, 07.04.1964 | |||
| УСТРОЙСТВО ДЛЯ ВОЗДЕЙСТВИЯ НА ПРИЗАБОЙНУЮ ЗОНУ ПЛАСТА | 1996 |
|
RU2113628C1 |
| Машина для погрузки горных пород | 1979 |
|
SU1038485A1 |

