Изобретение относится к области автоматического управления и может найти применение в системах с нелинейной импульсной и линейной непрерывной частью второго порядка и предназначено в основном для регулируемых источников питания с LC-фильтром.
Известен релейный способ управления, использующий скользящий процесс, заключающийся в том, что определяют сигнал ошибки, пропорциональный разности выходного сигнала системы и сигнала задания, формируют дифференцированный сигнал, пропорциональный производной выходного сигнала системы, формируют управляющий сигнал, пропорциональный сумме сигнала ошибки и дифференцированного сигнала, определяют знак управляющего сигнала, управление осуществляют по знаку управляющего сигнала [1-3].
Основным недостатком этого способа управления является обратно пропорциональная зависимость частоты переключения блока регулирования от сигнала ошибки, что приводит к теоретически неограниченному повышению частоты переключения в установившихся режимах работы, увеличению динамических потерь в блоке регулирования, усложнению фильтрации и ухудшению электромагнитной совместимости аппаратуры.
Известен способ управления, использующий скользящий процесс только в переходных режимах работы, отличающийся от предыдущего тем, что отключают дифференцированный сигнал в режимах работы, близких к установившемуся [4].
Недостатком этого способа управления является необходимость настройки системы управления под два режима работы, что усложняет схему управления и понижает устойчивость системы.
Наиболее близким техническим решением, выбранным в качестве прототипа, является способ управления преобразователем электрической энергии с широтно-импульсным регулированием (способ управления импульсным стабилизатором напряжения), заключающийся в том, что определяют сигнал ошибки, пропорциональный разности выходного сигнала системы и сигнала задания, формируют дифференцированный выходной сигнал, автоматическое управление осуществляют управляющим сигналом, который формируют по импульсному сигналу синхронизации из суммы сигнала ошибки, дифференцированного сигнала и пилообразного сигнала развертки [5].
Формирование управляющего сигнала известного способа управления преобразователем электрической энергии описывается выражением
f(t)= kocx(t) + Td (t) + kтiн + AL(t), (1)
(t) + kтiн + AL(t), (1)
где x(t),  сигнал ошибки и ее производной, kос, Td - коэффициент передачи сигналов x(t),
сигнал ошибки и ее производной, kос, Td - коэффициент передачи сигналов x(t),  kт - коэффициент передачи нагрузки, iн, AL(t) = (t-xT/T (на интервале nT ≤ t ≤ (n+1)T) - пилообразный периодический сигнал временной развертки с амплитудой 1B, формируемый блоком формирования сигнала развертки.
kт - коэффициент передачи нагрузки, iн, AL(t) = (t-xT/T (на интервале nT ≤ t ≤ (n+1)T) - пилообразный периодический сигнал временной развертки с амплитудой 1B, формируемый блоком формирования сигнала развертки.
Алгоритмы работы регулирующего элемента:
- размыкание при f(t) ≤ 0;
- замыкание возможно только в начале очередного периода синхронизации, если f(t)>0.
Преимуществом способа является то, что управление осуществляется на фиксированной частоте.
Недостаток этого способа заключается в том, что устойчивая работа возможна только в узком диапазоне значений коэффициентов kос, Td, kт, что не позволяет обеспечить апериодичность переходного процесса в широком диапазоне регулирования [6]. Кроме того, сигнал развертки не определяет состояния системы, поэтому изменение напряжения питания приводят к появлению статической ошибки.
Цель изобретения состоит в расширении функциональных возможностей способа управления, устранения статической ошибки, повышении устойчивости и качества регулирования.
Это достигается за счет того, что в способе управления преобразователем электрической энергии, заключающемся в том, что определяют сигнал ошибки, пропорциональный разности выходного сигнала системы и сигнала задания, формируют дифференцированный выходной сигнал, автоматическое управление осуществляют управляющим сигналом, который формируют из суммы сигнала ошибки, дифференцированного выходного сигнала и сигнала развертки, сигнал развертки согласно изобретению формируют из прогнозируемого на интервале от момента коммутации блока регулирования до конца периода синхронизации приращения дифференцированного выходного сигнала, смещенного на величину, равную сумме средних за период синхронизации значений приращений дифференцированного выходного сигнала на интервалах до и после коммутации блока регулирования.
Сущность изобретения заключается в том, что предлагаемый способ управления основан на синтезе принципов управления релейных систем и систем с импульсной модуляцией. Он позволяет использовать достоинства релейных систем со скользящим процессом и обеспечить работу импульсного элемента с заданной чистотой следования, т.е. реализовать регулятор с синхронизируемым скользящим процессом, и системы, обладающие заданными динамическими свойствами. Для этого при формировании управляющего сигнала используется сигнал развертки, который формируется из прогнозируемого на интервале от момента коммутации блока регулирования до конца периода синхронизации превращения дифференцированного выходного сигнала, смещенного на величину, равную сумме средних за период синхронизации значений приращений дифференцированного выходного сигнала на интервалах до и после коммутации блока регулирования. При этом в окрестностях установившегося режима к моменту переключения блока регулирования сигнал развертки становится равным по амплитуде и противоположным по знаку реальному дифференцированному выходному сигналу устройства, что обеспечивает коммутацию блока регулирования при отсутствии статической ошибки. Кроме того, момент переключения в блоке регулирования определяется с учетом последующего после переключения блока регулирования воздействия напряжения между входной и выходной шинами LC-фильтра на производную выходного сигнала устройства, что обеспечивает устойчивость установившегося режима в широком диапазоне задания параметров.
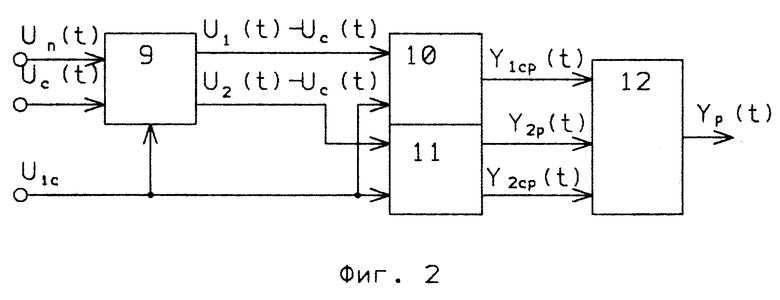
На фиг. 1 приведена структурная схема преобразователя электрической энергии; на фиг. 2 приведена структурная схема блока развертки для преобразователя электрической энергии.
Формирование управляющего сигнала для преобразователя электрической энергии, фиг. 1, описывается выражением
Uy(t) = X(t) + Td (t) + TdYp(t), (2),
(t) + TdYp(t), (2),
где X(t) = Uс(t)-Uом - сигнал ошибки, формируется как разность между выходным сигналом непрерывной части 3 преобразователя и опорным,  сигнал производной от выходного сигнала непрерывной части (LC-фильтра) 3 преобразователя, Yр(t) - сигнал развертки, Td - коэффициент передачи.
сигнал производной от выходного сигнала непрерывной части (LC-фильтра) 3 преобразователя, Yр(t) - сигнал развертки, Td - коэффициент передачи.
Переключение блока регулирования 2 на периоде синхронизации происходит при смене знака управляющего сигнала Uy(t), в исходное состояние блок регулирования 2 возвращается только в начале очередного периода синхронизации при условии, что знак сигнала управления Uy(t) принял исходное состояние.
Формирование сигнала развертки Yр(t)описывается выражением
Yр(t)=-Y2р(t)+Y1срY2ср(t) (3),
где Y2ср(t) - прогнозируемое приращение дифференцированного выходного сигнала для интервала от момента коммутации блока регулирования 2 до конца периода синхронизации, Y1ср(t), Y2ср(t) - средние за период синхронизации значения приращений дифференцированного выходного сигнала интервала до и после момента коммутации блока регулирования 2.
Формирование прогнозируемого приращения дифференцированного выходного сигнала Y2ср(t) для интервала от момента коммутации блока регулирования 2 до конца периода синхронизации описывается выражением
 постоянная времени (LC-фильтра) непрерывной части 3 преобразователя, t - время от начала периода синхронизации до переключения блока регулирования 2, Tn - длительность периода синхронизации, U1(t), U2(t) - напряжения, поступающие на вход [непрерывной части 3] преобразователя до и после момента коммутации блока регулирования 2 на периоде синхронизации. Так как за период синхронизации среднее значение дифференцированного выходного сигнала
постоянная времени (LC-фильтра) непрерывной части 3 преобразователя, t - время от начала периода синхронизации до переключения блока регулирования 2, Tn - длительность периода синхронизации, U1(t), U2(t) - напряжения, поступающие на вход [непрерывной части 3] преобразователя до и после момента коммутации блока регулирования 2 на периоде синхронизации. Так как за период синхронизации среднее значение дифференцированного выходного сигнала  преобразователя в установившемся режиме работы равно нулю, а определенный по формуле (4) сигнал Y2р(t) формируется как приращение относительно конца периода синхронизации, то сигнал Y2р(t) смещен относительно реального выходного дифференцированного сигнала
преобразователя в установившемся режиме работы равно нулю, а определенный по формуле (4) сигнал Y2р(t) формируется как приращение относительно конца периода синхронизации, то сигнал Y2р(t) смещен относительно реального выходного дифференцированного сигнала  на величину суммы средних за период синхронизации значений приращений дифференцированного выходного сигнала Y1ср(t), Y2ср(t) на интервалах до и после коммутации блока регулирования 2. Среднее за период синхронизации значение приращения дифференцированного выходного сигнала для интервала от момента коммутации блока регулирования 2 до конца периода синхронизации определяется по формуле
на величину суммы средних за период синхронизации значений приращений дифференцированного выходного сигнала Y1ср(t), Y2ср(t) на интервалах до и после коммутации блока регулирования 2. Среднее за период синхронизации значение приращения дифференцированного выходного сигнала для интервала от момента коммутации блока регулирования 2 до конца периода синхронизации определяется по формуле
Среднее за период синхронизации значение приращения дифференцированного выходного сигнала Y1ср(t) для интервала от начала периода синхронизации до момента коммутации блока регулирования 2 определяется по формуле
Равенство по амплитуде и противоположность по знаку сигнала развертки Yр(t) и дифференцированного выходного сигнала устройства  в момент переключения (t= tk) блока регулирования 2 обеспечивает для заданного закона управления коммутацию при отсутствии статической ошибки X(tk)=0 и устойчивую работу преобразователя. В этом случае существует единственный устойчивый предельный цикл и выполняются условия моментов переключения, условия направлений переключения и условия отсутствия дополнительных переключений [1].
в момент переключения (t= tk) блока регулирования 2 обеспечивает для заданного закона управления коммутацию при отсутствии статической ошибки X(tk)=0 и устойчивую работу преобразователя. В этом случае существует единственный устойчивый предельный цикл и выполняются условия моментов переключения, условия направлений переключения и условия отсутствия дополнительных переключений [1].
Устройство для управления преобразователем электрической энергии, выполненное согласно предложенному способу управления (фиг. 1, 2), содержит блок питания 1, блок регулирования 2, LC-фильтр 3, датчик тока 4, генератор синхронизирующего напряжения 6, блок формирования напряжения развертки 8, шину опорного напряжения задания Uon, блок формирования управляющего напряжения 7 и узел сравнения 5, силовая входная шина блока регулирования 2 соединена с выходной шиной Un блока питания 1, управляющая входная шина блока регулирования 2 соединена с выходной шиной Uy(t) блока формирования управляющего напряжения 7, силовая выходная шина блока регулирования 2 соединена с силовой входной шиной LC-фильтра 3, силовая выходная шина которого Uс(t) является выходной шиной устройства, входные шины узла сравнения 5 соединены с выходной шиной Uс(t) устройства и с шиной Uon опорного напряжения задания, входные шины датчика тока 4 включены в цепь конденсатора LC-фильтра 3, выходные шины  датчика тока 4, X(t) узла сравнения 5, Yр(t) блока формирования напряжения развертки 8 и Uiс генератора синхронизирующего напряжения 6 соединены с входными шинами блока формирования управляющего напряжения 7, входная шина блока формирования напряжения развертки 8 соединена с выходной шиной Uiс генератора синхронизирующего напряжения 6, в блок формирования напряжения развертки 8 дополнительно введены вторая и третья входные шины, вторая входная шина соединена с выходной шиной Uп блока питания 1, а третья входная шина с выходной шиной Uс(t) устройства, при этом блок формирования напряжения развертки 8 содержит узел определения воздействующих напряжений 9, два узла интегрирования 10, 11 и сумматор 12, узел определения воздействующих напряжений 9 имеет три входа, соединенных с входами блока формирования напряжения развертки 8, и два выхода U1(t)-Uс(t), U2(t)-Uc(t), оба узла интегрирования 10, 11 имеют по два входа, первый вход первого узла интегрирования 10 соединен с первым выходом U1(t)-Uс(t) узла определения воздействующих напряжений 9, первый вход второго узла интегрирования 11 соединен со вторым выходом U2(t)-Uс(t) узла определения воздействующих напряжений 9, вторые входы обоих узлов интегрирования 10, 11 соединены с первой входной шиной Uiс блока формирования напряжения развертки 8, первый узел интегрирования 10 имеет один выход Y1ср(t), второй узел интегрирования 11 имеет два выхода Y2р(t), Y2ср(t), все выходы узлов интегрирования 10, 11 соединены с выходами сумматора 12, выход сумматора 12 соединен с выходной шиной Yр(t) блока формирования напряжения развертки 8 и соединен с соответствующей входной шиной блока формирования управляющего напряжения 7.
датчика тока 4, X(t) узла сравнения 5, Yр(t) блока формирования напряжения развертки 8 и Uiс генератора синхронизирующего напряжения 6 соединены с входными шинами блока формирования управляющего напряжения 7, входная шина блока формирования напряжения развертки 8 соединена с выходной шиной Uiс генератора синхронизирующего напряжения 6, в блок формирования напряжения развертки 8 дополнительно введены вторая и третья входные шины, вторая входная шина соединена с выходной шиной Uп блока питания 1, а третья входная шина с выходной шиной Uс(t) устройства, при этом блок формирования напряжения развертки 8 содержит узел определения воздействующих напряжений 9, два узла интегрирования 10, 11 и сумматор 12, узел определения воздействующих напряжений 9 имеет три входа, соединенных с входами блока формирования напряжения развертки 8, и два выхода U1(t)-Uс(t), U2(t)-Uc(t), оба узла интегрирования 10, 11 имеют по два входа, первый вход первого узла интегрирования 10 соединен с первым выходом U1(t)-Uс(t) узла определения воздействующих напряжений 9, первый вход второго узла интегрирования 11 соединен со вторым выходом U2(t)-Uс(t) узла определения воздействующих напряжений 9, вторые входы обоих узлов интегрирования 10, 11 соединены с первой входной шиной Uiс блока формирования напряжения развертки 8, первый узел интегрирования 10 имеет один выход Y1ср(t), второй узел интегрирования 11 имеет два выхода Y2р(t), Y2ср(t), все выходы узлов интегрирования 10, 11 соединены с выходами сумматора 12, выход сумматора 12 соединен с выходной шиной Yр(t) блока формирования напряжения развертки 8 и соединен с соответствующей входной шиной блока формирования управляющего напряжения 7.
Устройство работает следующим образом, при формировании управляющего напряжения Uy(t) в блоке 7 используется напряжение развертки Yр(t), которое формируется блоком формирования напряжения развертки 8 по формуле 3, при этом узел 9 определения воздействующих напряжений формирует из напряжений источника питания 1 и выходного напряжения преобразователя Uс(t) напряжения U1(t)-Uс(t), U2(t)-Uс(t), воздействующие на непрерывную часть преобразователя, на периоде синхронизации, до и после переключения блока регулирования 2, которые поступают на входы узлов интегрирования 10, 11.
При этом первый вход узла интегрирования 10 соединен с первым входом U1(t)-Uс(t) узла определения воздействующих напряжений 9, второй вход узла интегрирования 10 соединен с выходом Uiс генератора синхронизирующего напряжения 6. Узел интегрирования 10 состоит из двух интеграторов, вход первого интегратора соединен с первым входом узла интегрирования 10, выход первого интегратора соединен с входом второго интегратора, оба интегратора устанавливаются в нуль по короткому импульсу Uiс генератора синхронизирующего напряжения 6 в начале каждого периода синхронизации, на выходе первого интегратора формируется напряжение, пропорциональное приращению относительно начала периода синхронизации прогнозируемого на интервале до коммутации блока регулирования 2 дифференцированного выходного сигнала, на выходе второго интегратора формируется напряжение Y1ср(t) по формуле 6, которое пропорционально среднему за период синхронизации приращению относительно начала периода синхронизации прогнозируемого на интервале до коммутации блока регулирования 2 дифференцированного выходного сигнала.
Первый вход узла интегрирования 11 соединен со вторым выходом U2(t)-Uс(t) узла определения воздействующих напряжений 9, второй вход узла интегрирования 11 соединен с выходом Uiс генератора синхронизирующего напряжения 6, узел интегрирования 11 состоит из двух интеграторов, двух элементов памяти и двух сумматоров, вход первого интегратора соединен с первым входом узла интегрирования 11, вход первого элемента памяти соединен с выходом первого интегратора, выходы первого интегратора и первого элемента памяти соединены с входами первого сумматора, выход первого сумматора соединен с первым выходом узла интегрирования 11 и с входом второго интегратора, вход второго элемента памяти соединен с выходом второго интегратора, выходы второго интегратора и второго элемента памяти соединены с входами второго сумматора, выход второго сумматора соединен со вторым выходом узла интегрирования 11.
По сигналу Uiс генератора синхронизирующего напряжения 6 производятся запись амплитуды напряжения с выхода первого интегратора в первый элемент памяти и установка первого интегратора в нуль, на выходе первого сумматора, соединенного с первым выходом узла интегрирования 11, формируется напряжение Y2р(t) по формуле 4, которое можно представить как
При этом на выходе первого интегратора формируется напряжение
которое пропорционально приращению дифференцированного выходного сигнала на момент коммутации относительно начала периода синхронизации при напряжениях, воздействующих после коммутации блока регулирования 2. На выходе первого элемента памяти формируется напряжение
которое пропорционально приращению дифференцированного выходного сигнала за весь период синхронизации определенного для интервала после коммутации блока регулирования 2.
По сигналу Uiс генератора синхронизирующего напряжения 6 производится запись амплитуды напряжения с выхода второго интегратора во второй элемент памяти и установка второго интегратора в нуль, на выходе второго сумматора, соединенного со вторым выходом узла интегрирования 11, формируется напряжение Y2ср по формуле 5, которое можно представить как
При этом на выходе второго интегратора узла интегрирования 11 формируется напряжение
которое пропорционально среднему за период синхронизации приращения дифференцированного выходного сигнала на момент коммутации относительно начала периода синхронизации, определенного для интервала после коммутации блока регулирования 2. На выходе второго элемента памяти формируется напряжение
которое пропорционально среднему приращению дифференцированного выходного сигнала, определенного на интервале после коммутации блока регулирования 2, за весь период синхронизации.
Выходы второго интегратора узла интегрирования 10, первого и второго сумматора узла интегрирования 11 соединены с входами сумматора 12, на выходе которого формируется напряжение Yр(t) блока формирования напряжения развертки 8 по формуле 3.
Таким образом, предложенный способ управления позволяет обеспечить работу преобразователя электрической энергии с заданной частотой переключения регулирующего блока при отсутствии статической ошибки, т.е. реализовать регулятор с синхронизируемым скользящим процессом и системы, обладающие заданными динамическими свойствами, обеспечивая устойчивость установившегося режима в широком диапазоне задания параметров. Наличие узла формирования воздействующих напряжений 9 позволяет использовать предложенный способ управления не только в различных типах импульсных преобразователей постоянного тока, но и для управляемых выпрямителей переменного тока как с нулевым диодом в блоке регулирования (выпрямителе) 2, так и без него.
Литература
1. Теория систем с переменной структурой /С.В. Емельянов, В.С. Уткин, В. А. Таран и др., под ред. С.В. Емельянова - М.: Наука. Гл. Ред. Физ-мат. Лит. , 1970.
2. Нелинейные нестационарные системы /Г.Л. Вышковский, Л.З. Ганопольский, А.М. Долгов и др., Под ред. Ю.И. Топчеева - М.: Машиностроение, 1986.
3. Попов Е.П. Теория нелинейных систем автоматического регулирования и управления: Учебное пособие. - М.: Наука. Гл. Ред. Физ-мат. Лит., 1988.
4. А.С. СССР 519683, кл G 05 F 13/02, опубл. 1976.
5. Условия устойчивости и коэффициент стабилизации импульсного стабилизатора с обратными связями по току и напряжению /Г.А. Белов, С.А. Кузьмин. - ЭТВА, Вып. 15. С. 48.: Радио и связь, 1984.
6. Двухзонные следящие системы /В.В. Шеваль, Е.И. Дорохов, С.А. Исаков, В.И. Земцов. - М.: Энергоатомиздат, 1984. (Б-ка по автоматике, вып. 646).
7. Анализ и расчет цепи обратной связи импульсного стабилизатора напряжения с ШИМ. Б.К. Гальс. В сб. "Полупроводниковые приборы в технике электросвязи". Под ред. И.Ф. Николаевского. М., "Связь", 1974, вып. 13, с. 43.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ С ШИРОТНО-ИМПУЛЬСНЫМ РЕГУЛИРОВАНИЕМ | 2001 |
|
RU2214618C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ НАПРЯЖЕНИЯ ПОВЫШАЮЩЕГО ТИПА | 2005 |
|
RU2309448C2 |
| БЛОК ПЕРИОДИЧЕСКОЙ РАЗВЕРТКИ ДЛЯ ПРЕОБРАЗОВАТЕЛЯ НАПРЯЖЕНИЯ С ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 2000 |
|
RU2197059C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЯМИ ПОСТОЯННОГО НАПРЯЖЕНИЯ С ОДНОСТОРОННЕЙ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 2007 |
|
RU2337394C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 2002 |
|
RU2264689C2 |
| МНОГОКАНАЛЬНЫЙ БЛОК ПЕРИОДИЧЕСКОЙ РАЗВЕРТКИ ДЛЯ УПРАВЛЯЕМОГО МНОГОФАЗНОГО ВЫПРЯМИТЕЛЯ | 2000 |
|
RU2185703C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСКОНТАКТНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 2002 |
|
RU2239937C2 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ ПРЕОБРАЗОВАТЕЛЕМ НАПРЯЖЕНИЯ | 2021 |
|
RU2759688C1 |
| БЛОК ПЕРИОДИЧЕСКОЙ РАЗВЕРТКИ ДЛЯ СЛЕДЯЩЕГО ИМПУЛЬСНОГО ПРЕОБРАЗОВАТЕЛЯ | 2003 |
|
RU2254663C2 |
| СЛЕДЯЩИЙ ИНВЕРТОР С ОДНОСТОРОННЕЙ ДВУХПОЛЯРНОЙ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 2003 |
|
RU2264644C2 |
Изобретение предназначено для использования в регулируемых источниках питания с LC-фильтром. Технический результат - расширение функциональных возможностей способа управления, устранение статической ошибки, повышение устойчивости и качества регулирования. Способ управления заключается в формировании управляющего сигнала с использованием сигнала развертки, который формируется из прогнозируемого для интервала от момента коммутации блока регулирования до конца периода синхронизации приращения дифференцированного выходного сигнала, смещенного на величину, равную сумме средних за период синхронизации значений приращений дифференцированного выходного сигнала для интервала до и после коммутации блока регулирования. При этом в окрестностях установившегося режима к моменту переключения блока регулирования сигнал развертки становится равным по амплитуде и противоположным по знаку реальному дифференцированному выходному сигналу устройства, что обеспечивает коммутацию блока регулирования при отсутствии статической ошибки. Кроме того, момент переключения в блоке регулирования определяется с учетом последующего после переключения блока регулирования воздействия напряжения на входной и выходной шинах LC-фильтра на производную выходного сигнала устройства, обеспечивая устойчивость установившегося режима в широком диапазоне задания параметров и позволяя использовать предложенный способ управления не только в различных типах импульсных преобразователей постоянного тока, но и для управляемых выпрямителей переменного тока как с нулевым диодом, так и без него. 2 ил.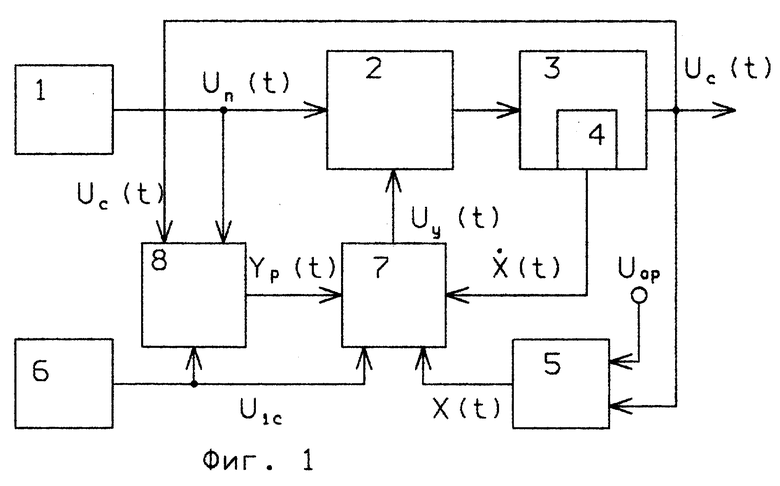
Способ управления преобразователем электрической энергии, заключающийся в том, что определяют сигнал ошибки, пропорциональный разности выходного сигнала и сигнала задания, формируют дифференцированный выходной сигнал, автоматическое управление осуществляют управляющим сигналом, который формируют из суммы сигнала ошибки, дифференцированного выходного сигнала и сигнала развертки, отличающийся тем, что сигнал развертки формируют из прогнозируемого для интервала от момента коммутации блока регулирования до конца периода синхронизации приращения дифференцированного выходного сигнала, смещенного на величину, равную сумме средних за период синхронизации значений приращений дифференцированного выходного сигнала для интервалов до и после коммутации блока регулирования.
| БЕЛОВ Г.А., КУЗЬМИН С.А | |||
| Условия устойчивости и коэффициент стабилизации импульсного стабилизатора с обратными связями по току и напряжению | |||
| Электронная техника в автоматике | |||
| Сб | |||
| статей / Под ред | |||
| Ю.И | |||
| КОНЕВА | |||
| - М.: Радио и связь, 1984, с.48 - 58, рис.1 | |||
| Устройство для управления инерционным объектом | 1975 |
|
SU519683A1 |
| RU 94020934 А1, 10.04.1996 | |||
| МОБИЛЬНОЕ БЕСПРОВОДНОЕ 3D УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ УЛЬТРАЗВУКОВЫХ ИЗОБРАЖЕНИЙ И СИСТЕМА УЛЬТРАЗВУКОВОЙ ВИЗУАЛИЗАЦИИ | 2013 |
|
RU2647146C2 |
| ВЫШКОВСКИЙ Г.Л | |||
| и др | |||
| Нелинейные стационарные системы | |||
| - М.: Машиностроение, 1986, с.164 - 170. | |||
