Предлагаемое изобретение относится к электротехнике и предназначено для использования в источниках вторичного электропитания устройств радиотехники, автоматики и вычислительной техники.
Известен способ управления импульсным преобразователем напряжения, заключающийся в том, что управляющий сигнал формируют как сумму сигнала рассогласования, сигнала тока дросселя и сигнала пилообразной развертки с постоянной амплитудой (Условия устойчивости и коэффициент стабилизации импульсного стабилизатора с обратными связями по току и напряжению, Г.А. Белов, С.А. Кузьмин. - ЭТВА, вып. 15. С. 48-58.: Радио и связь, 1984).
Недостатком известного способа управления является то, что устойчивая работа преобразователя возможна только в узком диапазоне изменения напряжения питания и тока нагрузки, кроме того, сигнал развертки не определяет состояния системы, поэтому изменение напряжения питания или тока нагрузки приводит к появлению статической ошибки.
Наиболее близким аналогом, выбранным в качестве прототипа, является способ управления импульсным преобразователем напряжения, заключающийся в том, что вычисляют сигнал ошибки между выходным и заданным напряжением, вычисляют сигнал рассогласования между током дросселя и током нагрузки, определяют сигнал развертки как прогнозируемое к моменту коммутации ключевого элемента значение сигнала рассогласования с противоположным знаком, управляющий сигнал формируют как сумму сигнала ошибки, сигнала рассогласования, и сигнала развертки (Казанцев Ю.М., Лекарев А.Ф., Тихонов Е.Г. Синтез управления следящими инверторами систем электропитания // Приборы и системы. Управление, контроль, диагностика. 2004. №6. С. 20-25).
Известный способ реализует закон управления вида
где F - управляющий сигнал; x=(Uн-Uoп) - сигнал ошибки; Uн - выходное напряжение; Uоп - напряжение задания;  - сигнал рассогласования; iL - ток дросселя; iн - ток нагрузки; km - коэффициент пропорциональности, определяющий динамические характеристики преобразователя (Казанцев Ю.М., Чернышев А.И., Лекарев А.Ф. Формирование квазискользящих процессов в импульсных преобразователях с ШИМ // Электричество. 1993. №12. С. 45-49); Yр - сигнал развертки; L - индуктивность дросселя; U1L - напряжение на дросселе в начале периода модуляции; U2L - напряжение на дросселе в конце периода модуляции; при модуляции заднего фронта U1L=Uп-Uн, U2L=-Uн; при модуляции переднего фронта U1L=-Uн, U2L=Uп-Uн; Т - длительность периода модуляции. tp=T{t/T] - временная координата для формирования сигнала развертки ({t/T} - дробная часть выражения t/T); tк - момент коммутации ключевого элемента, определяемый корнями уравнения F=0 при F'>0 для модуляции заднего фронта импульса и при F'<0 для модуляции переднего фронта импульса; F' - производная управляющего сигнала; VT - состояние ключевого элемента (VT=1 - включен, VT=0 - выключен).
- сигнал рассогласования; iL - ток дросселя; iн - ток нагрузки; km - коэффициент пропорциональности, определяющий динамические характеристики преобразователя (Казанцев Ю.М., Чернышев А.И., Лекарев А.Ф. Формирование квазискользящих процессов в импульсных преобразователях с ШИМ // Электричество. 1993. №12. С. 45-49); Yр - сигнал развертки; L - индуктивность дросселя; U1L - напряжение на дросселе в начале периода модуляции; U2L - напряжение на дросселе в конце периода модуляции; при модуляции заднего фронта U1L=Uп-Uн, U2L=-Uн; при модуляции переднего фронта U1L=-Uн, U2L=Uп-Uн; Т - длительность периода модуляции. tp=T{t/T] - временная координата для формирования сигнала развертки ({t/T} - дробная часть выражения t/T); tк - момент коммутации ключевого элемента, определяемый корнями уравнения F=0 при F'>0 для модуляции заднего фронта импульса и при F'<0 для модуляции переднего фронта импульса; F' - производная управляющего сигнала; VT - состояние ключевого элемента (VT=1 - включен, VT=0 - выключен).
Известный способ управления обеспечивает устойчивую работу преобразователя в широком диапазоне изменения напряжения питания и нагрузки.
Недостатком известного способа управления является появление статической ошибки при изменении тока нагрузки обусловленное возникающим несоответствием между принятым и текущим значением индуктивности дросселя (текущее значение может изменяться от времени, внешних условий, зависит от тока дросселя).
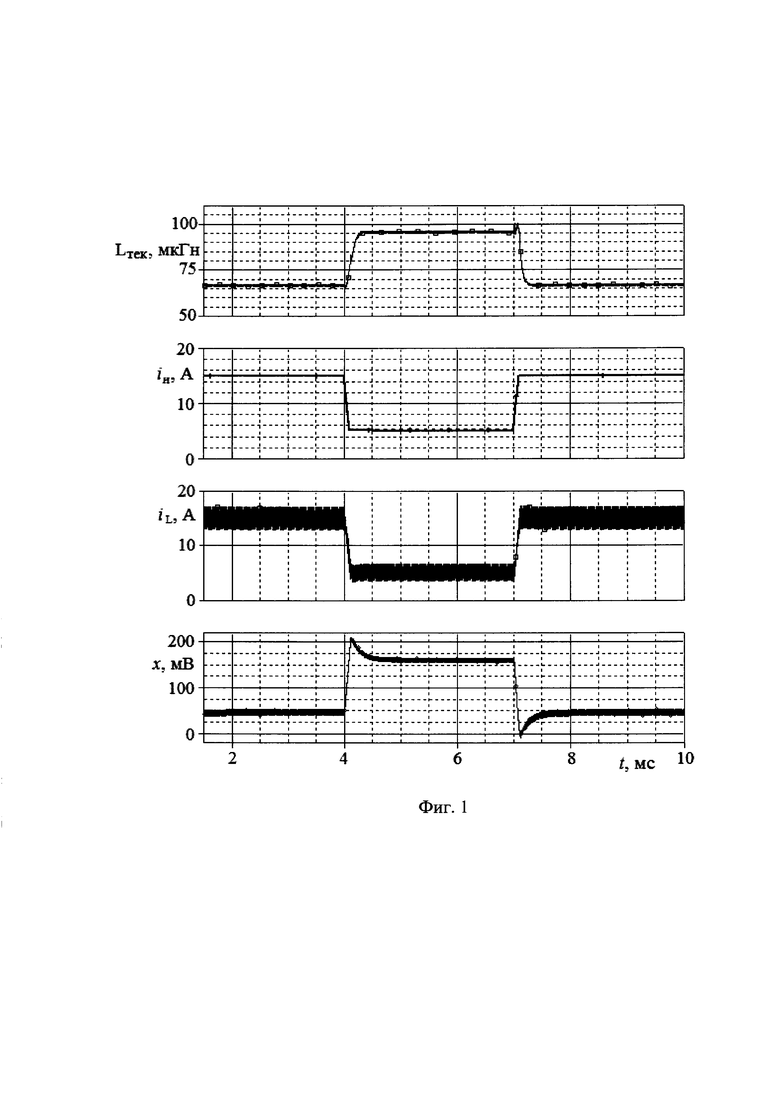
Для подтверждения сказанного проведено моделирование преобразователя. На фиг. 1 представлены временные диаграммы сигнала ошибки х=Uн-Uоп, тока дросселя iL, тока нагрузки iн и текущие значения индуктивности дросселя при скачкообразном изменении тока нагрузки iн от 15 до 5 А и обратно в преобразователе напряжения с задним фронтом широтно-импульсной модуляции и параметрах Uп=50 В, Uоп=27 В, частота модуляции - 50 кГц, емкость выходного конденсатора С=750 мкФ, дроссель имеет 70 витков на магнитопроводе МП140-1, К 44,0*28,0*10,3 индуктивность дросселя, принятая для формирования сигнала развертки, L=63 мкГн.
Видно, что изменение выходного тока преобразователя приводит к изменению текущего значения индуктивности дросселя и как следствие к смещению сигнала ошибки (смещение пропорционально разнице значений текущей и расчетной индуктивности дросселя).
Технический результат предполагаемого изобретения состоит в устранении статической ошибки выходного напряжения импульсного преобразователя напряжения при изменении тока нагрузки.
Технический результат достигается тем, что в способе управления импульсным преобразователем напряжения, заключающемся в вычислении сигнала ошибки между выходным и заданным напряжением, вычислении сигнала рассогласования между током дросселя и нагрузки, определении сигнала развертки как прогнозируемого к моменту коммутации ключевого элемента значения сигнала рассогласования с противоположным знаком, формировании управляющего сигнала как суммы сигналов ошибки, рассогласования и развертки, дополнительно вычисляют текущее значение индуктивности дросселя, а сигнал развертки определяют с использованием вычисленного текущего значения индуктивности дросселя.
Для вычисления текущего значения индуктивности дросселя определяют отношение текущего значения напряжения дросселя к сигналу пропорциональному производной по времени от сигнала тока дросселя.
Сущность изобретения заключается в том, что управление преобразователем осуществляют с использованием вычисленного текущего значения индуктивности дросселя.
Уравнение индуктивности дросселя имеет следующий вид:

где UL - текущее значение напряжения дросселя;  - сигнал пропорциональный производной по времени от сигнала тока дросселя.
- сигнал пропорциональный производной по времени от сигнала тока дросселя.
Работу преобразователя осуществляют в соответствии с законом управления

При модуляции заднего фронта

при модуляции переднего фронта

где F - управляющий сигнал; х=(Uн-Uоп) - сигнал ошибки; Uоп - сигнал задания;  - сигнал рассогласования; iL - ток дросселя; iн - ток нагрузки; km - коэффициент пропорциональности, определяющий динамические характеристики преобразователя; Y - сигнал развертки без учета индуктивности дросселя; YР - сигнал развертки; Lтек - текущее значение индуктивности дросселя; tp=T{t/T} - временная координата для формирования сигнала развертки {{t/T} - дробная часть выражения t/T); tк - момент коммутации ключевого элемента, определяемый корнями уравнения F=0 при F'>0 для модуляции заднего фронта импульса и при F'<0 для модуляции переднего фронта импульса; VT - состояние ключевого элемента (VT=1 - включен, VT=0 - выключен).
- сигнал рассогласования; iL - ток дросселя; iн - ток нагрузки; km - коэффициент пропорциональности, определяющий динамические характеристики преобразователя; Y - сигнал развертки без учета индуктивности дросселя; YР - сигнал развертки; Lтек - текущее значение индуктивности дросселя; tp=T{t/T} - временная координата для формирования сигнала развертки {{t/T} - дробная часть выражения t/T); tк - момент коммутации ключевого элемента, определяемый корнями уравнения F=0 при F'>0 для модуляции заднего фронта импульса и при F'<0 для модуляции переднего фронта импульса; VT - состояние ключевого элемента (VT=1 - включен, VT=0 - выключен).
На фиг. 2 представлена схема импульсного преобразователя постоянного напряжения, реализующая предлагаемый способ управления; на фиг. 3 приведены временные диаграммы сигнала тока дросселя 3 iL, тока нагрузки Iн, сигнала ошибки х=Uн-Uоп и текущие значения индуктивности дросселя при скачкообразном изменении тока нагрузки Iн от 15 до 5 А и обратно в понижающем преобразователе напряжения с законом управления (3).
Импульсный преобразователь напряжения (фиг. 2) состоит из: ключевого элемента 1, диода 2, дросселя 3, выходного конденсатора 4, нагрузки 5, блока 6 формирования VT - переключающего сигнала, узла 7 формирования F - управляющего сигнала, узла 8 вычисления  - сигнала рассогласования, узла 9 вычисления х - сигнала ошибки, узла 10 формирования Yp - сигнала развертки, блока 11 формирования сигнала пропорционального производной по времени от сигнала тока дросселя 3, блока 12 вычисления Lтек - текущего значения индуктивности дросселя 3, блока 13 вычисления Y - сигнала развертки без учета индуктивности дросселя 3, датчика 14 тока дросселя 3, датчика 15 тока нагрузки 5, датчика 16 напряжения дросселя 3.
- сигнала рассогласования, узла 9 вычисления х - сигнала ошибки, узла 10 формирования Yp - сигнала развертки, блока 11 формирования сигнала пропорционального производной по времени от сигнала тока дросселя 3, блока 12 вычисления Lтек - текущего значения индуктивности дросселя 3, блока 13 вычисления Y - сигнала развертки без учета индуктивности дросселя 3, датчика 14 тока дросселя 3, датчика 15 тока нагрузки 5, датчика 16 напряжения дросселя 3.
Первый вывод ключевого элемента 1 соединен с шиной питания Uп, второй вывод ключевого элемента 1, первый вывод диода 2 и первый вывод дросселя 3 соединены между собой, второй вывод дросселя 3 соединен с первым выводом конденсатора 4 через датчик 14, первый вывод конденсатора 4 соединен с выходной шиной Uн через датчик 15, первый вывод нагрузки 5 соединен с выходной шиной Uн, вторые выводы диода 2, выходного конденсатора 4 и нагрузки 5 соединены с общей шиной U0, управляющий вход ключевого элемента 1 соединен с выходом VT блока 6, первый вход блока 6 соединен с выходом F узла 7, первый вход узла 7 соединен с выходом  узла 8, второй вход узла 7 соединен с выходом х узла 9, третий вход узла 7 соединен с выходом Yp узла 10, первый вход узла 10 соединен с выходом Lтек блока 12, первый вход блока 12 соединен с выходом
узла 8, второй вход узла 7 соединен с выходом х узла 9, третий вход узла 7 соединен с выходом Yp узла 10, первый вход узла 10 соединен с выходом Lтек блока 12, первый вход блока 12 соединен с выходом  блока 11, второй вход узла 8 и вход узла 11 соединены с выходом IL датчика 14, первый вход узла 8 соединен с выходом Iн датчика 15, первый вход узла 9 и первый вход блока 13 соединены с выходной шиной Uн, второй вход узла 9 соединен с шиной задания Uоп, второй вход узла 10 соединен с выходом Y блока 13, второй вход блока 12 соединен с выходом UL датчика 16, второй вход блока 13 соединен с шиной питания Uп, второй вход блока 6 и третий вход блока 13 соединены с шиной синхронизации t0.
блока 11, второй вход узла 8 и вход узла 11 соединены с выходом IL датчика 14, первый вход узла 8 соединен с выходом Iн датчика 15, первый вход узла 9 и первый вход блока 13 соединены с выходной шиной Uн, второй вход узла 9 соединен с шиной задания Uоп, второй вход узла 10 соединен с выходом Y блока 13, второй вход блока 12 соединен с выходом UL датчика 16, второй вход блока 13 соединен с шиной питания Uп, второй вход блока 6 и третий вход блока 13 соединены с шиной синхронизации t0.
Импульсный преобразователь напряжения (фиг. 2), реализующий закон управления (3) работает следующим образом:
Блок 11 формирует сигнал  пропорциональный производной по времени от сигнала тока дросселя 3.
пропорциональный производной по времени от сигнала тока дросселя 3.
Блок 12 вычисляет текущее значение индуктивности дросселя 3 по формуле (2)

где UL - текущее значение напряжения дросселя 3, поступает с датчика 16;
 - сигнал пропорциональный производной по времени от сигнала тока дросселя 3, поступает с выхода узла 11.
- сигнал пропорциональный производной по времени от сигнала тока дросселя 3, поступает с выхода узла 11.
В блоке 13 формируют сигнал развертки Y (без учета индуктивности дросселя) для преобразователей напряжения с модуляцией заднего фронта - выражением

а для преобразователей напряжения с модуляцией переднего фронта - выражением

где tp=T{t/T} - временная координата для формирования сигнала развертки {{t/T} - дробная часть выражения t/T); tp=0 при поступлении сигнала t0 с шины синхронизации t0.
В узле 10 формируют сигнал развертки Yp выражением
где Lтек - текущее значение индуктивности дросселя 3, поступает с выхода блока 12; Y - сигнал развертки Y (без учета индуктивности дросселя), поступает с выхода блока 13.
В узле 8 вычисляют сигнал рассогласования  выражением
выражением
где iL - сигнал тока дросселя 3, поступает с выхода датчика 14; iн - сигнал тока нагрузки, поступает с выхода датчика 15.
В узле 9 формируют сигнал ошибки - выражением
где Uн - поступает с выходной шины Uн; Uоп - поступает с шины задания Uоп.
В узле 7 формируют управляющий сигнал F выражением

где х - сигнал рассогласования, поступает с выхода узла 9;  - сигнал рассогласования, поступает с выхода узла 8; Yр - сигнал развертки, поступает с выхода узла 10.
- сигнал рассогласования, поступает с выхода узла 8; Yр - сигнал развертки, поступает с выхода узла 10.
В узле 6 в соответствии с законом управления (3) формируют переключающий сигнал VT, управляющий состоянием ключевого элемента 1.
Иллюстрация эффекта от реализации предложенного способа управления приведена на фиг. 3 временными диаграммами сигнала рассогласования х=Uн-Uоп, тока дросселя iL, тока нагрузки iн и текущие значения индуктивности дросселя при скачкообразном изменении тока нагрузки iн от 15 до 5 А и обратно в преобразователе напряжения с задним фронтом широтно-импульсной модуляции и параметрах Uп=50 В, Uоп=27 В, частота модуляции - 50 кГц, емкость выходного конденсатора С=750 мкФ, дроссель имеет 70 витков на магнитопроводе МП140-1, К 44,0*28,0*10,3
Видно, что при изменении тока нагрузки статическое значение сигнала рассогласования между выходным и заданным сигналами не меняется.
Таким образом, формирование сигнала развертки с использованием текущих значений индуктивности дросселя 3 устраняет статическую ошибку выходного напряжения импульсного преобразователя напряжения при изменении тока нагрузки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ ПРЕОБРАЗОВАТЕЛЕМ ПОСТОЯННОГО НАПРЯЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2475805C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ НАПРЯЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2497266C2 |
| СПОСОБ УПРАВЛЕНИЯ ОБРАТИМЫМ ИМПУЛЬСНЫМ ПРЕОБРАЗОВАТЕЛЕМ ПОСТОЯННОГО НАПРЯЖЕНИЯ СО СТАБИЛИЗАЦИЕЙ ПРЕДЕЛЬНОГО ТОКА | 2007 |
|
RU2339993C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ НАПРЯЖЕНИЯ С ДВУХЗВЕННЫМ ФИЛЬТРОМ | 2009 |
|
RU2383049C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЯМИ ПОСТОЯННОГО НАПРЯЖЕНИЯ С ОДНОСТОРОННЕЙ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 2007 |
|
RU2337394C1 |
| СПОСОБ УПРАВЛЕНИЯ РАВНОМЕРНЫМ ТОКОРАСПРЕДЕЛЕНИЕМ В МНОГОКАНАЛЬНОМ ИМПУЛЬСНОМ ПРЕОБРАЗОВАТЕЛЕ НАПРЯЖЕНИЯ | 2007 |
|
RU2337393C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ НАПРЯЖЕНИЯ | 2008 |
|
RU2369895C1 |
| РЕЛЕЙНЫЙ СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ НАПРЯЖЕНИЯ | 2007 |
|
RU2345400C1 |
| СПОСОБ УПРАВЛЕНИЯ РАВНОМЕРНЫМ ТОКОРАСПРЕДЕЛЕНИЕМ В МНОГОКАНАЛЬНОМ ИМПУЛЬСНОМ ПРЕОБРАЗОВАТЕЛЕ НАПРЯЖЕНИЯ | 2011 |
|
RU2447478C1 |
| СПОСОБ ПИТАНИЯ НАГРУЗКИ ОТ СОЛНЕЧНОЙ БАТАРЕИ | 2004 |
|
RU2279705C2 |


Предлагаемое изобретение относится к электротехнике и предназначено для использования в источниках вторичного электропитания устройств радиотехники, автоматики и вычислительной техники. Техническим результатом является устранение статической ошибки выходного напряжения импульсного преобразователя напряжения при изменении тока нагрузки. Сущность изобретения заключается в том, что управление преобразователем осуществляют с использованием вычисленного текущего значения индуктивности дросселя. 3 ил.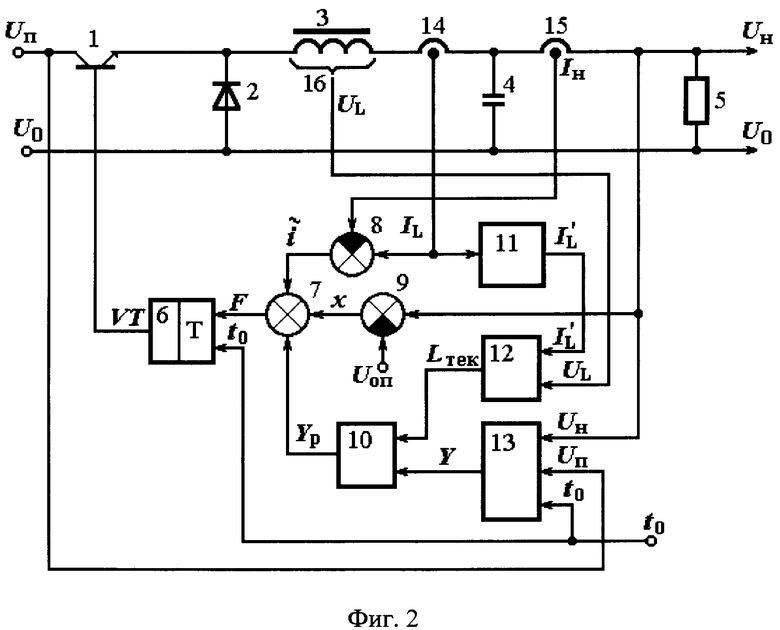
Способ управления импульсным преобразователем напряжения, заключающийся в вычислении сигнала ошибки между выходным и заданным напряжением, вычислении сигнала рассогласования между током дросселя и нагрузки, определении сигнала развертки как прогнозируемого к моменту коммутации ключевого элемента значения сигнала рассогласования с противоположным знаком, формировании управляющего сигнала как суммы сигналов ошибки, рассогласования и развертки, отличающийся тем, что вычисляют текущее значение индуктивности дросселя, а сигнал развертки определяют с использованием вычисленного текущего значения индуктивности дросселя.
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ ПОСТОЯННОГО НАПРЯЖЕНИЯ | 2011 |
|
RU2451322C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ ПОСТОЯННОГО НАПРЯЖЕНИЯ | 2003 |
|
RU2254606C2 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2012 |
|
RU2509337C1 |
| ОПТИЧЕСКИЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2006 |
|
RU2324210C1 |

