Предлагаемое техническое решение относится к области электротехники и предназначено для бесконтактных электроприводов с широким диапазоном регулирования частоты вращения.
Наиболее близким техническим решением, выбранным в качестве прототипа, является способ управления преобразователем электрической энергии, основанный на широтно-импульсной модуляции напряжения питания, заключающийся в том, что определяют сигнал ошибки, пропорциональный разности выходного сигнала и сигнала задания, формируют дифференцированный выходной сигнал, управляющий сигнал формируют из суммы сигнала ошибки, дифференцированного выходного сигнала и сигнала развертки, а сигнал развертки формируют равным по амплитуде и противоположным по знаку прогнозируемому на момент после коммутации ключевых элементов значению дифференцированного выходного сигнала [1].
В известном способе управления выходным сигналом является выходное напряжение преобразователя, способ позволяет формировать на выходе напряжение любой полярности и с широким диапазоном регулирования, однако для управления бесконтактным электродвигателем, технически сложно получить дифференцированный выходной сигнал скорости из-за наличия в нем помех от существующих датчиков, а отсутствие многофазного блока ключевых элементов, кодовых сигналов положения ротора, а также сигналов, пропорциональных напряжению на индуктивностях фазных обмоток электродвигателя, необходимых для формирования сигналов развертки, не позволяет использовать этот способ для управления бесконтактным электродвигателем постоянного тока.
Цель технического решения - расширение функциональных возможностей способа для управления бесконтактным электродвигателем постоянного тока.
Это достигается тем, что в способе управления преобразователем, основанном на широтно-импульсной модуляции напряжения питания, заключающемся в том, что определяют сигнал ошибки, пропорциональный разности выходного сигнала и сигнала задания, формируют дифференцированный выходной сигнал, управляющий сигнал формируют из суммы сигнала ошибки, дифференцированного выходного сигнала и сигнала развертки, управление бесконтактным электродвигателем постоянного тока осуществляют коммутацией фазных обмоток, выбор коммутируемых фазных обмоток производят по сигналам кодового датчика положения ротора, двухстороннюю широтно-импульсную модуляцию напряжения питания осуществляют формированием двух управляющих сигналов.
Сущность технического решения заключается в том, что дифференцированный выходной сигнал формируют равным сумме сигнала, пропорционального приращению скорости вращения вала электродвигателя за период модуляции, и сигнала, пропорционального переменной составляющей электромагнитного момента электродвигателя, сигнал электромагнитного момента электродвигателя формируют пропорциональным сумме произведений токов в фазных обмотках электродвигателя на угловой коэффициент преобразования соответствующей фазной обмотки электродвигателя, а сигнал развертки формируют равным по амплитуде и противоположным по знаку прогнозируемому после коммутации ключевых элементов значению переменной составляющей электромагнитного момента электродвигателя, прогнозируемое значение переменной составляющей электромагнитного момента формируют равным произведению прогнозируемого приращения тока в силовой цепи электродвигателя на угловой коэффициент преобразования электродвигателя, прогнозируемое приращение тока в силовой цепи электродвигателя формируют равным прогнозируемому приращению тока в индуктивности цепи электродвигателя от напряжения, равного разности прогнозируемого напряжения на входе электродвигателя после коммутации ключевых элементов и напряжения равного сумме падений напряжений в блоке ключевых элементов, на активном сопротивлении силовой цепи и ЭДС вращения электродвигателя, сигнал ЭДС вращения электродвигателя формируют равным произведению сигнала скорости вращения на угловой коэффициент преобразования электродвигателя, сигнал углового коэффициента преобразования электродвигателя формируют равным сумме сигналов угловых коэффициентов коммутируемых фазных обмоток электродвигателя, сигналы угловых коэффициентов фазных обмоток электродвигателя формируют в функции от углового положения ротора электродвигателя.
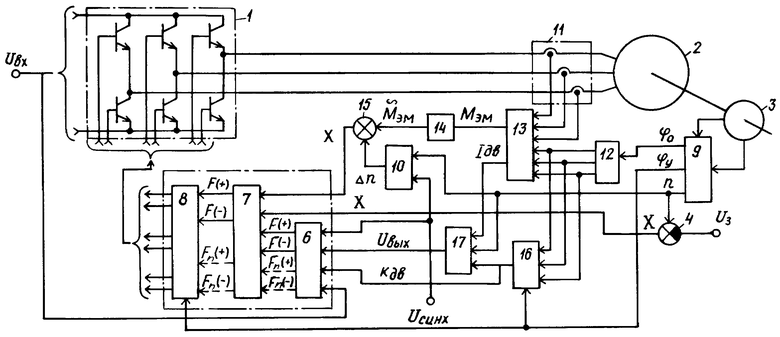
На чертеже приведена структурная схема устройства, реализующего предложенный способ управления.
Устройство содержит: блок ключевых элементов 1 (собран по трехфазной мостовой схеме), электродвигатель 2 (синхронный электродвигатель с возбуждением от постоянных магнитов) с установленным на его валу преобразователем положения 3, узел сравнения 4, блок управления 5, узел 9 обработки сигналов преобразователя положения 3, формирующего сигналы ϕ0 - углового положения, для формирования угловых коэффициентов преобразования электродвигателя 2, ϕу - кодового положения, для управления коммутацией фазных обмоток электродвигателя 2, и сигнала n - скорости вращения электродвигателя 2, узел 10 формирования сигнала приращения скорости вращения за период модуляции, датчик 11 измерения тока в фазных обмотках электродвигателя 2, узел 12 формирования сигналов угловых коэффициентов преобразования фазных обмоток электродвигателя 2, узел 13 формирования сигналов Мэм электромагнитного момента электродвигателя 2 и Iдв, тока двигателя 2, узел 14 формирования сигнала ~Мэм, переменной составляющей электромагнитного момента электродвигателя 2, узел 15 суммирования, узел 16 формирования углового коэффициента преобразования электродвигателя 2, узел 17 формирования сигнала суммы падений напряжений в блоке ключевых элементов 1, на активном сопротивлении силовой цепи и ЭДС вращения электродвигателя 2, блок управления 5 содержит узел 6 формирования разверток, узел 7 формирования управляющих сигналов, узел 8 формирования широтно-модулированных сигналов управления блоком ключевых элементов 1. Входные шины фазных обмоток электродвигателя 2 соединены с выходными шинами блока ключевых элементов 1, входы узла сравнения 4 соединены с выходом n узла 9 и шиной задания скорости вращения Uз, выходы узла 8 соединены с выходами блока управления 5 и с шинами управления блоком ключевых элементов 1, первые два входа узла 8 соединены с выходами узла 7, третий вход узла 8 соединен с выходом ϕу узла 9, первый вход узла 7 соединен с первым входом блока управления 5 и с выходом узла суммирования 15, второй вход узла 7 соединен со вторым входом блока управления 5 и с выходом узла сравнения 4, третий и четвертый входы узла 7 соединены с выходами узла 6, четыре входа узла 6 соединены соответственно с третьим, четвертым, пятым и шестым входами блока управления 5, третий вход блока управления 5 соединен с входной шиной синхронизации Uсинх, четвертый вход блока управления 5 соединен с выходом узла 17, пятый вход блока управления 5 соединен с выходом узла 17, шестой вход блока управления 5 соединен с входной шиной напряжения питания Uвх, первый вход узла 17 соединен с выходом Iдв узла 13, второй вход узла 17 соединен с выходом n узла 9, третий вход узла 17 соединен с выходом узла 16, первые три входа узла 16 соединены с выходами узла 12, четвертый вход узла 16 соединен с выходом ϕу узла 9, входы узла суммирования 15 соединены с выходами узлов 10 и 14, первый вход узла 10 соединен с выходом n узла 9, второй вход узла 10 соединен с входной шиной синхронизации Uсинх, вход узла 14 соединен с выходом Мэм узла 13, первые три входа узла 13 соединены с выходами датчика тока 11, четвертый, пятый, шестой входы узла 13 соединены с выходами узла 12, вход узла 12 соединен с выходом ϕ0 узла 9, входы узла 9 соединены с выходами кодового преобразователя положения 3.
Формирование управляющих сигналов в блоке 7 для бесконтактного электропривода описывается выражениями

где F(+) - управляющий сигнал для включения напряжения питания формирующего положительный электромагнитный момент двигателя; F(-) - управляющий сигнал для включения напряжения питания формирующего отрицательный электромагнитный момент двигателя; х=n-U3 - сигнал ошибки, формируется узлом сравнения 4 как разность между сигналом n скорости вращения (формируется узлом 9) и сигналом U3, задания скорости вращения электродвигателя; TD - коэффициент передачи сигналов х, Y(+), Y(-); x=dx/dt=Δn+Mэм - дифференцированный выходной сигнал, формируется узлом суммирования 15 как сумма сигнала, пропорционального приращению сигнала скорости вращения за период модуляции, формируется узлом 10 и сигнала переменной составляющей электромагнитного момента электродвигателя 2, формируется узлом 14; Мэм - сигнал электромагнитного момента электродвигателя 2, формируется узлом 13 по формуле

где ia, iв, ic - сигналы тока фазных обмоток электродвигателя 2, формируются датчиком тока 11; ка, кв, кс - угловые коэффициенты преобразования фазных обмоток электродвигателя 2, формируются узлом 12; а, в, с - индексы соответствующих фазных обмоток электродвигателя 2; Y(+), Y(-), - сигналы разверток для формирования соответствующих управляющих сигналов F(+), F(-), формируются узлом разверток 6 по формулам

где T - длительность периода синхронизации; Lдв - суммарная индуктивность силовой цепи и коммутируемых фазных обмоток электродвигателя 2; кдв - угловой коэффициент преобразования электродвигателя 2 (формируется узлом 16 суммированием угловых коэффициентов преобразования коммутируемых фазных обмоток электродвигателя 2); t(+)=T·{t/T} - временная координата для формирования сигнала развертки Y(+); t(-)=Т·{(1+Т/2)/T} - временная координата для формирования сигнала развертки Y(-), ({а} - дробная часть числа а [2]), (сброс в нуль временных координат t(+) и t(-) осуществляется, распределенным на два, сигналом синхронизации Uсинх), (Uвx) - сигнал напряжения питания на входе блока ключевых элементов 1; Uвых - расчетная составляющая суммы напряжения падения в блоке ключевых элементов, падения на суммарном активном сопротивлении силовой цепи и коммутируемых фазных обмоток и ЭДС вращения электродвигателя 2 формируется узлом 17 по формуле

где 2Uкsgn(Iдв) - падение напряжения в блоке ключевых элементов 1; Iдвr - падение напряжения на суммарном активном сопротивлении r силовой цепи и коммутируемых фазных обмоток электродвигателя 2; е - суммарная ЭДС вращения коммутируемых фазных обмоток электродвигателя 2.
Широтно-модулированные сигналы управления блоком ключевых элементов 1 формируются узлом 8 по следующему алгоритму; включение напряжения, формирующего положительный электромагнитный момент, производится после отключения напряжения формирующего отрицательный электромагнитный момент двигателя 2, определяется наименьшим отрицательным корнем уравнения F[+)=0; включение напряжения, формирующего отрицательный электромагнитный момент, производится после отключения напряжения, формирующего положительный электромагнитный момент двигателя 2, определяется наименьшим положительным корнем уравнения F(-)=0, выбор коммутируемых фазных обмоток электродвигателя 2 производится по кодовым сигналам ϕy, формируемым узлом 9.
Для управления однополярной на периоде синхронизации двухсторонней широтно-импульсной модуляцией напряжения питания узлом 6 формируют третий и четвертый дополнительные сигналы разверток

Соответственно узлом 7 формируют дополнительные третий и четвертый управляющие сигналы

При этом широтно-модулированные сигналы управления блоком ключевых элементов 1 формируются узлом 8 по следующему алгоритму; включение напряжения, формирующего положительный электромагнитный момент электродвигателя 2, определяется наименьшим отрицательным корнем уравнения F(+)=0; отключение напряжения, формирующего положительный электромагнитный момент электродвигателя 2, определяется наименьшим положительным корнем уравнения F0(+)=0; включение напряжения, формирующего отрицательный электромагнитный момент двигателя 2, определяется наименьшим положительным корнем уравнения F(-)=0; отключение напряжения, формирующего отрицательный электромагнитный момент электродвигателя 2, определяется наименьшим отрицательным корнем уравнения F0(-)=0.
Предложенное техническое решение позволяет формировать сигналы разверток с учетом напряжения питания, падения напряжения на ключевых элементах, падения напряжения на активном сопротивлении силовой цепи и ЭДС вращения двигателя таким образом, что в установившемся режиме в момент коммутации блока ключевых элементов дифференцированный сигнал ошибки равен по амплитуде и противоположен по знаку соответствующему сигналу развертки, что обеспечивает коммутацию блока ключевых элементов 1 при отсутствие статической ошибки, т.е. реализовать управление с синхронизируемым скользящим процессом и заданными динамическими свойствами, обеспечивая устойчивость установившегося режима в широком диапазоне изменения параметров и при любом направлении вращения.
Источники информации
1. Патент РФ №2156996, кл G 05 F 1/56, опубл. 27.09.2000, БИМП №27.
2. Райхмист Р.Б. Графики функций: Справ. пособие для вузов. - М.: Высш. шк., 1991, с.92-93.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 2002 |
|
RU2264689C2 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩАЮЩИМ МОМЕНТОМ ВЕНТИЛЬНОГО ДВИГАТЕЛЯ | 2010 |
|
RU2457610C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЯМИ ПОСТОЯННОГО НАПРЯЖЕНИЯ С ОДНОСТОРОННЕЙ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 2007 |
|
RU2337394C1 |
| СПОСОБ ПИТАНИЯ НАГРУЗКИ ОТ СОЛНЕЧНОЙ БАТАРЕИ | 2004 |
|
RU2279705C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ НАПРЯЖЕНИЯ С ДВУХЗВЕННЫМ ФИЛЬТРОМ | 2009 |
|
RU2383049C1 |
| СПОСОБ УПРАВЛЕНИЯ С ШИРОТНО-ИМПУЛЬСНЫМ РЕГУЛИРОВАНИЕМ | 2001 |
|
RU2214618C2 |
| СПОСОБ УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ВОЗБУЖДЕНИЕМ ОТ ПОСТОЯННЫХ МАГНИТОВ | 2022 |
|
RU2805989C2 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ ПРЕОБРАЗОВАТЕЛЕМ НАПРЯЖЕНИЯ | 2021 |
|
RU2759688C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ НАПРЯЖЕНИЯ ПОВЫШАЮЩЕГО ТИПА | 2005 |
|
RU2309448C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 1998 |
|
RU2156996C2 |
Способ управления бесконтактным электродвигателем, основанный на широтно-импульсной модуляции напряжения питания, заключающийся в том, что определяют сигнал ошибки, пропорциональный разности выходного сигнала и сигнала задания, формируют дифференцированный выходной сигнал, управляющий сигнал формируют из суммы сигнала ошибки, дифференцированного выходного сигнала и сигнала развертки, отличающийся тем, что управление осуществляют коммутацией фазных обмоток электродвигателя по сигналам кодового датчика положения ротора, двухстороннюю широтно-импульсную модуляцию напряжения питания осуществляют формированием двух управляющих сигналов, выходной сигнал формируют пропорциональным сигналу скорости вращения электродвигателя, дифференцированный выходной сигнал формируют равным сумме сигнала, пропорционального приращению за период модуляции выходного сигнала, и сигнала, пропорционального переменной составляющей электромагнитного момента электродвигателя, а сигнал развертки для каждого управляющего сигнала формируют равным по амплитуде и противоположным по знаку прогнозируемому после коммутации ключевых элементов приращению электромагнитного момента электродвигателя.
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 1998 |
|
RU2156996C2 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 1991 |
|
RU2016474C1 |
| Способ управления вентильным электродвигателем и устройство для его осуществления | 1990 |
|
SU1823082A1 |
| Окуляр микроскопа | 1986 |
|
SU1363117A1 |
| US 5838122 А, 17.11.1998 | |||
| МОДУЛЬ СЕПАРИРУЮЩИЙ ДЛЯ ПРЕОБРАЗОВАНИЯ КАРТОФЕЛЕКОПАТЕЛЯ В КОРНЕКЛУБНЕУБОРОЧНЫЙ КОМБАЙН | 2000 |
|
RU2195103C2 |
| Доменная печь | 1984 |
|
SU1266865A1 |
| Способ определения координаты трещины при испытаниях металлических конструкций | 1978 |
|
SU872949A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

