Изобретение относится к автоматическому регулированию, а именно к супервизорным пропорционально- интегрально- дифференциальным (ПИД) регуляторам, позволяющим одновременно с высоким качеством отрабатывать и задающее и возмущающее воздействия, и может быть использовано при автоматизации различных технологических процессов.
Известны системы связи электронно-вычислительной машины (ЭВМ) с пневматическими регуляторами, содержащие, в частности, регуляторы, аналоговые ячейки памяти (динамические звенья) [авт. свид. СССР N 1341617, кл. G 05 В 15/00, Бюл. изобр. N 36, 1987], предназначенные для работы в супервизорном режиме.
Известны устройства регулирования, содержащие, в частности, регулятор и инерционное (динамическое) звено в задающем канале [авт. свид. СССР N 1486986, кл. G 05 В 15/00, Бюл. изобр. N 22, 1989], которые могут работать, в специальных режимах, в том числе и супервизорном режиме.
Однако такие системы и устройства обладают сложной конструкцией и не обеспечивают коррекцию (а следовательно, и высокого качества) работы в супервизорном режиме всех составляющих (в частности, интегральной и дифференциальной) закона регулирования, когда задающее воздействие подается от внешнего задатчика (регулятора, ЭВМ и т.п.) и может изменяться произвольным образом, в том числе и скачкообразно.
Известны также различные структуры ПИД-регуляторов, содержащих интегратор, дифференциатор, а также усилитель (пропорциональная П-часть), выход которых подключен к входам сумматора, выход которого является выходным каналом регулятора [см., например, кн.: Острем К. и Виттенмарк Б. Системы управления с ЭВМ - М.: Мир, 1987, с. 207, рис. 8.5].
Однако эти ПИД-регуляторы также не обеспечивают коррекцию работы всех составляющих закона регулирования в супервизорном режиме.
Наиболее близким по технической сущности к предлагаемому является супервизорный регулятор, содержащий параллельно соединенные интегратор и дифференциатор, а также усилитель, выходы которых подключены к входам сумматора, выход которого является выходным каналом регулятора, вход усилителя подключен к выходу первого элемента сравнения, минусовой вход которого подключен к каналу регулируемого параметра непосредственно, плюсовой вход элемента сравнения через первое динамическое звено соединен с каналом задания [см. кн.: Пневмогидроавтоматика и пневмопривод: Тезисы докладов Всесоюзного совещания, Суздаль, часть 1. - М., 1990, с. 88: Бирман А. И. Пневматический супервизорный регулятор].
Однако в известном супервизорном регуляторе обеспечивается коррекция работы только пропорциональной составляющей закона регулирования в супервизорном режиме. Это не позволяет добиться значительного улучшения качества регулирования.
Настоящее изобретение решает задачу повышения качества регулирования технологических параметров при отработке задающего воздействия путем оптимизации (коррекции) работы всех (и каждой в отдельности) составляющих закона управления. Так как эти составляющие должны быть настроены на оптимальное подавление возмущающего воздействия, то без предлагаемой коррекции они отрабатывают задающее воздействие с очень низкими показателями качества по сравнению с тем случаем, когда эти же составляющие настраиваются на качественную отработку задающего воздействия. Но тогда в этом последнем случае получаем низкое качество подавления возмущающего воздействия. Таким образом, требуется одновременно обеспечить высокое качество работы ACP при подаче (при появлении) задающего и/или возмущающего воздействий.
В предлагаемом супервизорном ПИД-регуляторе, содержащем параллельно соединенные интегратор и дифференциатор, а также усилитель, выходы которых подключены к входам сумматора, выход которого является выходным каналом регулятора, вход усилителя подключен к выходу первого элемента сравнения, минусовой вход которого подключен к каналу регулируемого параметра непосредственно, плюсовой вход элемента сравнения через первое динамическое звено соединен с каналом задания, дополнительно установлены второе и третье динамические звенья, а также второй и третий элементы сравнения, минусовые входы которых подключены к каналу регулируемого параметра непосредственно, а их плюсовые входы подключены к каналу задания соответственно через второе и третье динамические звенья, выходы второго и третьего элементов сравнения соединены с входами соответственно интегратора и дифференциатора.
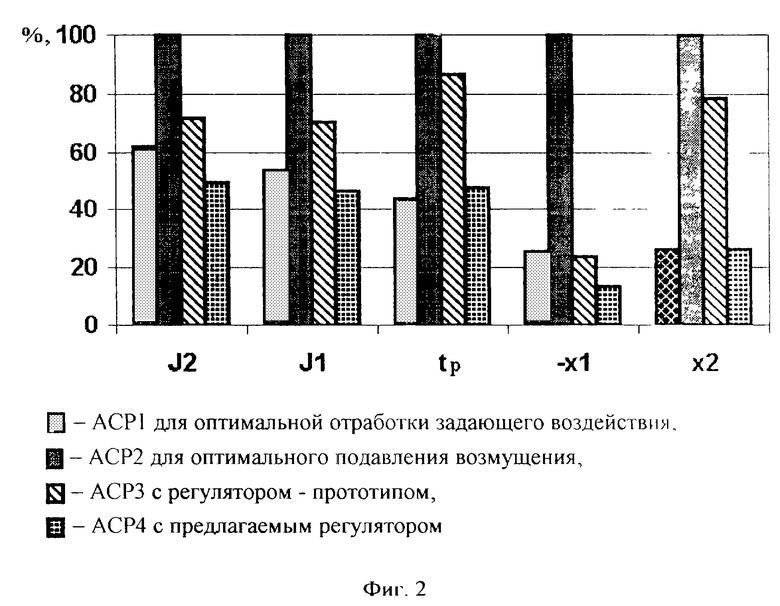
На фиг. 1 представлена блок-схема регулятора, на фиг. 2 - диаграммы показателей качества отработки скачка по заданию в автоматических системах регулирования (ACP) с различными регуляторами для сравнения с предлагаемым регулятором.
Супервизорный ПИД-регулятор содержит усилитель 1 (пропорциональная часть регулятора), интегратор 2, дифференциатор 3, сумматор 4, первый, второй и третий элементы сравнения (5-7) и первое, второе и третье динамические звенья (8 - 10). Динамические звенья 8 - 10 представляют собой супервизорную часть регулятора и могут быть реализованы, в частности, как простые масштабирующие усилители К1, К2, К3 или как фильтры какого-либо порядка и т.п.
Плюсовой вход элемента сравнения 5 подключен к каналу задания YЗДН через первое динамическое звено 8, минусовой вход - к каналу регулируемого параметра Y непосредственно, а выход ε1 элемента сравнения 5 соединен с входом усилителя 1. Плюсовой вход элемента сравнения 6 подключен к каналу задания YЗДН через второе динамическое звено 9, минусовой вход - к каналу регулируемого параметра Y непосредственно, а выход ε2 элемента сравнения 6 соединен с входом интегратора 2. Плюсовой вход элемента сравнения 7 подключен к каналу задания YЗДН соответственно через третье динамическое звено 10, минусовой вход - к каналу регулируемого параметра Y непосредственно, а выход ε3 элемента сравнения 7 соединен с входом дифференциатора 3. Выходы блоков 1, 2, 3 подключены к входам сумматора 4, выход U которого является выходным каналом регулятора.
Регулятор работает следующим образом.
При подавлении возмущающего воздействия в автоматической системе регулирования задание YЗДН постоянно, и, следовательно, выходные сигналы динамических звеньев 8 - 10 тоже являются постоянными и не влияют на выходной сигнал U регулятора. При этом изменение выходного сигнала U (чтобы скомпенсировать возмущающее воздействие) зависит только от регулируемого параметра (сигнал Y) и блоков 1 - 3 с оптимальными настройками (оптимальными для компенсации только возмущающего воздействия в ACP).
При отработке задающего воздействия YЗДН на плюсовой вход каждого элемента сравнения 5-7 поступает скорректированный сигнал задания с выхода соответствующего динамического звена 8, 9 или 10. Параметры корректирующих динамических звеньев 8- 10 подбираются таким образом, чтобы исходный (блоки 1 - 3) ПИД- регулятор (с неоптимальными настройками для отработки задающего воздействия, но с оптимальными - для подавления возмущающего воздействия) качественно отработал и задающее воздействие.
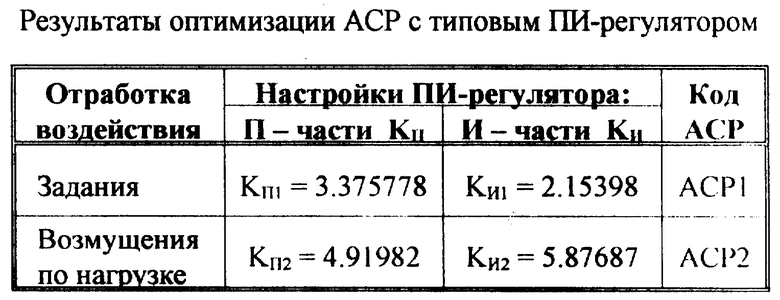
Исследования предлагаемого супервизорного регулятора совместно с моделью объекта управления показали высокий эффект от применения супервизорной части. Оптимизация параметров регулятора проведена по интегральному квадратичному критерию J2 = ∫ε2 dt ---> min, где ε - ошибка регулирования: ε = YЗДН - Y. Параметры модели объекта управления с самовыравниванием первого порядка с запаздыванием выбраны следующими: τ = 0,25; k0 = 1; T0 = 1. Результаты оптимизации для ПИ-регуляторов приведены в таблице.
Для оценки эффективности предлагаемого супервизорного регулятора (при отключенной Д-части с целью упрощения анализа) были проведены исследования следующих автоматических систем регулирования (ACP):
1) ACP1 с обычным ПИ-регулятором (для сравнения) с оптимальными настройками для отработки задающего воздействия; 2) ACP2 с обычным ПИ-регулятором с оптимальными настройками для компенсации возмущения по нагрузке; 3) ACP3 с супервизорным ПИ-регулятором (прототип) с оптимальными настройками для компенсации возмущення по нагрузке и с оптимальной настройкой К1опт = 0.540608 супервизорной части (блок 8) в канале задания П-части; 4) АСР4 более общего вида с таким же ПИ- регулятором и с оптимальными настройками сложной (предлагаемой) супервизорной части.
Отличие известной супервизорной системы ACP3 от системы ACP2 с обычным ПИ-регулятором заключается только в наличии у ACP3 дополнительного пропорционального звена К1 в канале отработки задания для П-части. Разность сигналов на выходе звена К1 и в обратной связи ACP3 подается на пропорциональную составляющую ПИ-регулятора.
Супервизорная часть регулятора (звенья К1 и К2) в общем случае может быть представлена динамическими звеньями (система ACP4) с передаточными функциями, например, вида:
W1=(K1(1+T1p))/(1+Т2р), W2=(К2(1+T3p))/(1+T4p)
с оптимальными значениями параметров их настройки: К1опт = 0.20513, T1опт = 0.58609, Т2опт = 0.0147; K2опт = 1, Т3опт = 0.9992, Т4опт = 0.39066 для заданного объекта управления при отработке задания.
Графики переходных процессов и диаграммы показателей качества (см. фиг. 2, где качественные показатели ACP2 приняты за 100%) отработки скачка по заданию в различных ACP (с ПИ-регуляторами) показывают, что ACP2, оптимальным образом компенсирующая возмущающее воздействие, не обеспечивает приемлемого качества регулирования при отработке задания. В частности, первый (x1) и второй (x2) максимальные выбросы ошибки регулирования ε в ACP2 почти в 4 раза больше, чем у исходной ACP1, предназначенной для оптимальной отработки задающего воздействия, но плохо отрабатывающей возмущения по нагрузке. На фиг. 2 также обозначено: tр - время регулирования; J1 - интегральный абсолютный критерий:  где
где  абсолютное значение ошибки регулирования.
абсолютное значение ошибки регулирования.
Простой супервизорный регулятор (ACP3) существенно повышает качество переходного процесса по сравнению с ACP2, но по большинству показателей качества (исключая незначительное уменьшение первого выброса x1) все же хуже исходной оптимальной (для сравнения) ACP1. Более сложный предлагаемый супервизорный регулятор (ACP4) обеспечивает наилучшие показатели качества отработки задания. При этом система ACP4 оптимальным образом (так же, как ACP2 и ACP3 и с теми же показателями качества) будет компенсировать и возмущающее воздействие.
На интегральную И-часть регулятора сигнал задания необходимо подавать, конечно, полностью, что подтверждается и результатами оптимизации параметров динамического звена 9 с передаточной функцией W2 (К2опт = 1) в канале задания И-части в АСР3. Другими словами, на И-часть регулятора задание необходимо подавать без какого-либо масштабирования в статическом режиме. В противном случае появится статическая ошибка регулирования.
Таким образом, главным отличием супервизорных регуляторов от обычных ПИ- и ПИД-регуляторов является наличие в каналах задания для отдельных (или всех по отдельности) составляющих закона управления дополнительных динамических звеньев с различными передаточными функциями. Если эти дополнительные динамические звенья являются инерционными звеньями, то обеспечивается безударный переход в супервизорный режим. Если эти же дополнительные звенья представляют собой простые масштабирующие усилители с коэффициентами К1, К2, К3, то предлагаемая схема реализует известные типы ПИД-регуляторов: 1) при K1=K2=K3=1 - стандартный "учебный" ПИД-регулятор [см., например, кн.: Острем К. и Виттенмарк Б. Системы управления с ЭВМ.- М. Мир, 1987, с. 205]; 2) при K1= К2 = 1, а К3 = 0 - промышленный супервизорный ПИД-регулятор с воздействием по производной только от регулируемого параметра Y (см. например, ПИД-регулятор типа ПР3.35 или ФР0095 пневматической системы СТАРТ, а также регулятор [см. кн.: Острем К. и Виттенмарк Б. Системы управления с ЭВМ.- М. Мир, 1987, с. 207, рис. 8.5, б]); 3) если же K1 = К3 = 0 и только К2 = 1 - супервизорный ПИД-регулятор с подачей сигнала задания YЗД только на интегратор [см. кн.: Острем К. и Виттенмарк Б. Системы управления с ЭВМ.- М. Мир, 1987, с. 207, рис. 8.5, в]; 4) при K1 ≠ 1 (как правило, К1 < 1) и К2 = К3 = 1 - простой супервизорный регулятор (прототип).
По сравнению с известными, предлагаемый супервизорный регулятор позволяет обеспечить существенное улучшение динамических характеристик систем регулирования технологических параметров при отработке возмущений по различным каналам, а также расширить функциональные возможности ACP.
Предлагаемый супервизорный ПИД-регулятор можно выполнить на элементах цифровой и микропроцессорной техники, и даже на элементах и модулях промышленной пневмоавтоматики его реализация не вызывает затруднений.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНЫХ СИГНАЛОВ | 1999 |
|
RU2156992C1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНЫХ СИГНАЛОВ | 1998 |
|
RU2120654C1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНЫХ СИГНАЛОВ | 1998 |
|
RU2120655C1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 1990 |
|
RU2047887C1 |
| ПНЕВМАТИЧЕСКИЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНОГО СИГНАЛА | 1992 |
|
RU2050574C1 |
| РЕГУЛЯТОР С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 2000 |
|
RU2161326C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| Пневматический регулятор | 1989 |
|
SU1716481A1 |
| Пневматический пропорционально-интегрально-дифференциальный регулятор | 1982 |
|
SU1043587A1 |
| Способ автоматической настройки ПИД-регулятора для управления дизельным двигателем в составе электроагрегатов и электростанций | 2016 |
|
RU2653938C2 |
Изобретение относится к автоматическому регулированию, а именно к супервизорным пропорционально-интегрально-дифференциальным (ПИД) устройствам управления, и может быть использовано при автоматизации различных технологических процессов. Технический результат изобретения заключается в повышении качества регулирования и расширении функциональных возможностей регулятора (реализуется супервизорный режим). Простыми средствами достигается оптимальная отработка задающего воздействия и оптимальное подавление возмущения. Супервизорный ПИД-регулятор содержит параллельно соединенные интегратор и дифференциатор, а также усилитель, выходы которых подключены к входам сумматора, выход которого является выходным каналом регулятора, первое, второе и третье динамические звенья, а также первый, второй и третий элементы сравнения, минусовые входы которых подключены к каналу регулируемого параметра непосредственно, а их плюсовые входы подключены к каналу задания соответственно через первое, второе и третье динамические звенья, выходы первого, второго и третьего элементов сравнения соединены с входами соответственно усилителя, интегратора и дифференциатора. 2 ил., 1 табл.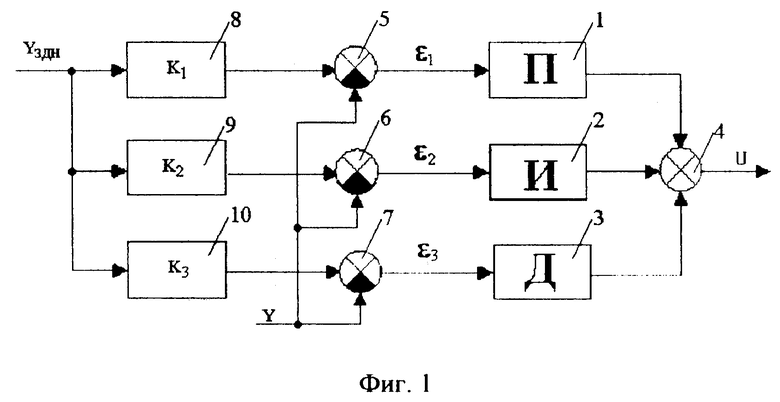
Супервизорный пропорционально-интегрально-дифференциальный регулятор, содержащий параллельно соединенные интегратор и дифференциатор, а также усилитель, выходы которых подключены к входам сумматора, выход которого является выходным каналом регулятора, вход усилителя подключен к выходу первого элемента сравнения, минусовой вход которого подключен к каналу регулируемого параметра непосредственно, плюсовой вход элемента сравнения через первое динамическое звено соединен с каналом задания, отличающийся тем, что он дополнительно содержит второе и третье динамические звенья, а также второй и третий элементы сравнения, минусовые входы которых подключены к каналу регулируемого параметра непосредственно, а их плюсовые входы подключены к каналу задания соответственно через второе и третье динамические звенья, выходы второго и третьего элементов сравнения соединены с входами соответственно интегратора и дифференциатора.
| БИРМАН А.И | |||
| Пневматический супервизорный регулятор | |||
| В: Пневмогидроавтоматика и пневмопривод | |||
| Тезисы докладов Всесоюзного совещания, Суздаль, ч.I, - М., 1990, с.88 | |||
| ОСТРЕМ К., ВИТТЕНМАРК Б | |||
| Системы управления с ЭВМ, - М.: Мир, 1987, с.207, рис.8.5 | |||
| SU 1486986 A1, 15.06.1989 | |||
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1985 |
|
SU1341617A1 |
| Система управления нелинейным объектом | 1991 |
|
SU1833834A1 |
| US 4430698 A, 07.02.1984. | |||
