г
(Я
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический регулятор | 1987 |
|
SU1474589A1 |
| Пневматический пропорционально-интегральный регулятор | 1989 |
|
SU1659978A1 |
| Пневматический резервный регулятор | 1990 |
|
SU1734073A1 |
| Пневматический регулятор | 1982 |
|
SU1040466A1 |
| Пневматический регулятор | 1991 |
|
SU1836660A3 |
| Пневматический регулятор | 1978 |
|
SU752229A1 |
| Пневматический регулятор | 1978 |
|
SU664154A1 |
| ПНЕВМАТИЧЕСКИЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНОГО СИГНАЛА | 1992 |
|
RU2050574C1 |
| Пневматический регулятор | 1978 |
|
SU926616A1 |
| Пневматический регулятор | 1982 |
|
SU1056131A1 |
Изобретение относится к техническим средствам автоматизации. Цель изобретения - повышение качества переходных процессов - достигается введением новых элементов и связей, Регулятор содержит задатчик опорного давления, дроссельный сумматор, интегральный и пропорциональный блоки. Первый вход дроссельного сумматора соединен с задатчиком, второй вход - с каналом задающего воздействия, а выход - с минусовой камерой пропорционального блока. 2 ил.
Изобретение относится к техническим средствам автоматизации, а именно к пневматическим регуляторам, работающим совместно с управляющей вычислительной машиной (УВМ) в супер- визорном режиме.
Известные пневматические регуяя- торы, содержащие последовательно соединенные пропорционально-интегральный блок и блок обратного предварения , обладают сложной конструкцией .- ч
Ближайшим техническим решением к предложенному является пневматический регулятор, содержащий задатчик опорного давления, интегрирующий блок, плюсовой и минусовой входы которого связаны соответственно с каналами регулируемой переменной и задающего воздействия; пропорциональный блок, выход которого соединен с выходным каналом регулятора, единичный вход
с выходом интегрирующего блока, а плюсовой вход - с каналом регулируемой переменной.
При значительных изменениях задания регулятор может переходить в режим насыщения (в тех случаях, когда коэффициент усиления регулятора по величине больше единицы), что приводит к ухудшению качества регулирования.
Далее применение известного регулятора сопровождается увеличением интегрального квадратичного критерия при скачкообразном изменении задания.
Целью изобретения является улучшение качества переходных процессов при возмущениях по заданию.
С этой целью в пневматическом регуляторе, содержащем задатчик опорного давления, интегрирующий блок и пропорциональный блок, дополнительно установлен повторитель и дроссельный
о
4
00
сумматор, первый вход которого соединен с задатчиком опорного давления, второй вход - с каналом задающего воздействия, а выход через повторитель связан с минусовым входом пропорционального блока.
Предложенное схемотехническое решение учитывает особенности формирования пропорциональной компоненты ПИ-алгоритма и позволяет улучшить качество переходных процессов в системах с предложенным регулятором.
Новые свойства предложенного регулятора, обуславливающие положитель-15 Kn. При у 1 предложенный регулятор ....« -,,.-., . к реализует стандартный ПИ-закон, при
обеспечивается совпадение свойств предложенного и известного суперви- зорного регуляторов.
20
ный эффект, появляются благодаря наличию в нем совокупности существенных признаков в их устойчивой взаимосвязи.
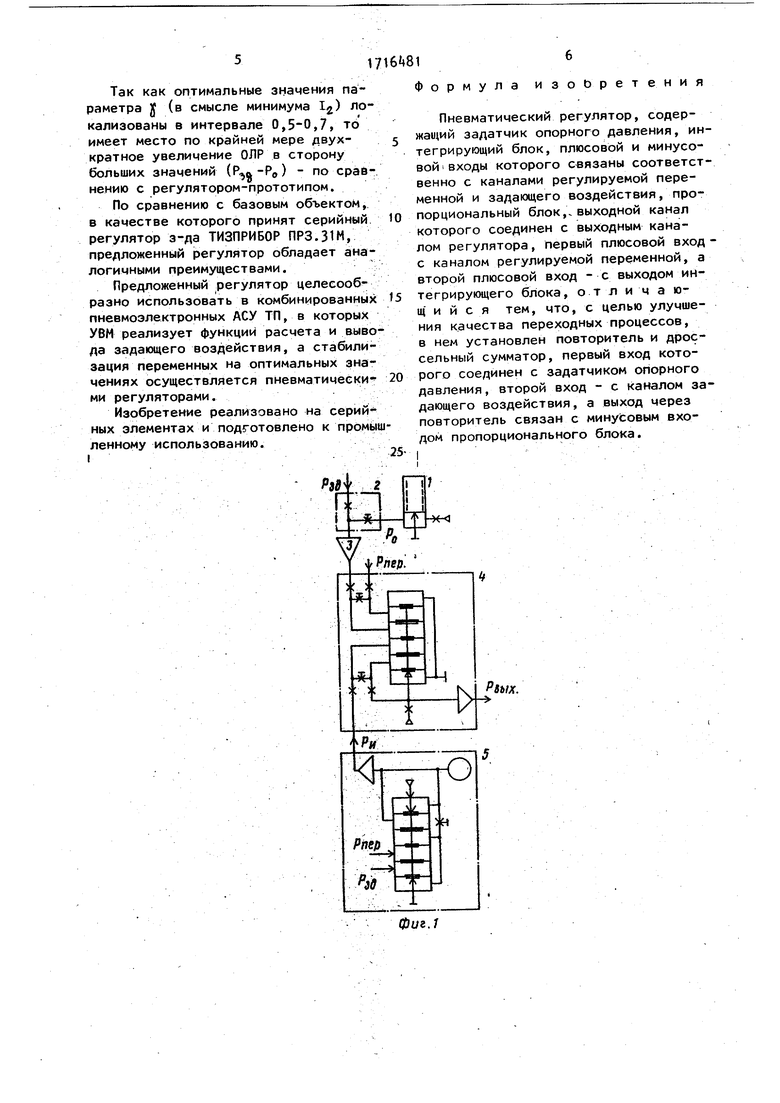
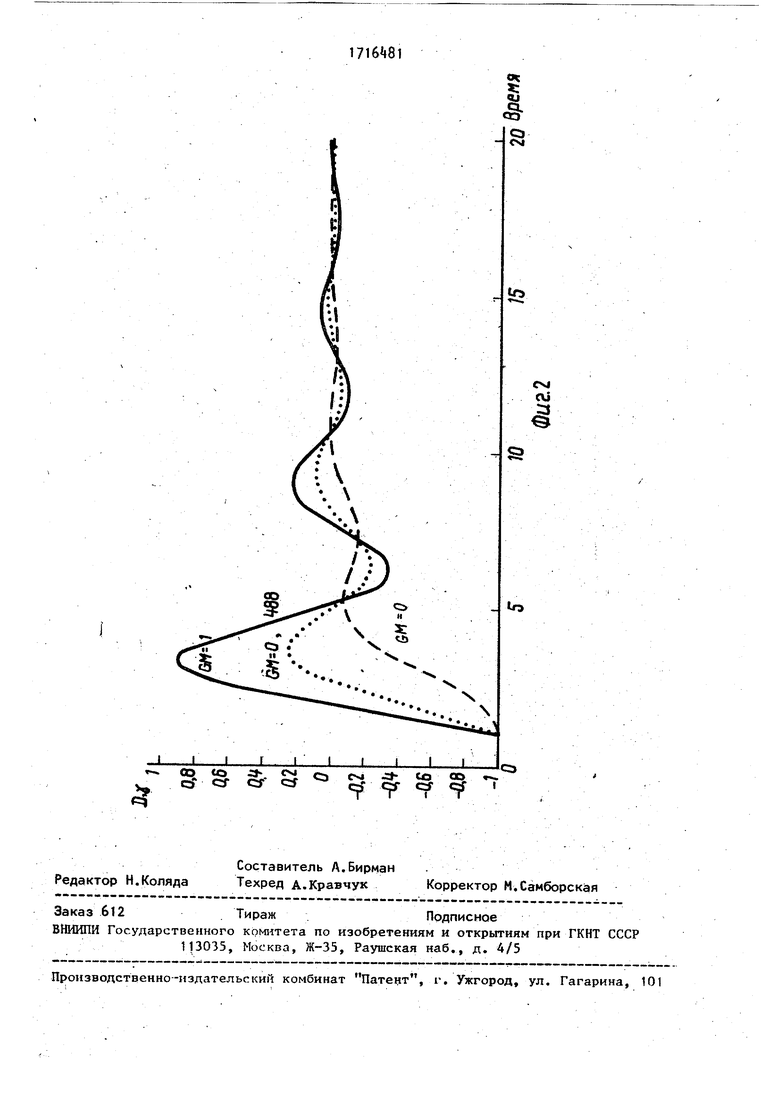
На фиг. 1 приведена принципиальная схема предложенного регулятора; на фиг. 2 - графики переходных процессов в САР с предложенным и известным регуляторами.
Регулятор содержит задатчик опор- 25 ного давления 1, дроссельный сумматор 2, повторитель 3, пропорциональный блок 4 и интегральный блок 5
Выход задатчика 1 опорного давлеКак следует из теории линейных систем автоматического регулирования, такие свойства регулятора должны обес печить более высокое качество регулирования при возмущениях по заданию по сравнению и со стандартным регулятором (1) и с супервизорным регулятором-прототипом ().
Как видно из графика на фиг. 2, в системах с предложенным регулятором
ния Р0 соединен с первым входом дрос-зо обеспечивается значительное (в 235
сельного сумматора 2, второй вход которого связан с минусовым входом интегрирующего блока 5 и каналом задающего воздействия РЭД , а выход через повторитель 3 сообщен с минусовой камерой пропорционального блока 4. Плюсовые входы интегрирующего и пропорционального блоков соединены с каналом регулируемой переменной Рцео единичный вход (контрольная точка) 4д пропорционального блока, связан с выходом Ри интегрирующего блока 5, а выход подключен к выходному каналу регулятора Р&Ь)Х.
Регулятор работает следующим образом.
В соответствии со схемой включения динамика регулятора описывается уравнением
3 раза) уменьшение первого выбега (по сравнению со стандартным регул тором) , при этом при оптимальном в боре параметра У имеет место сущес венное улучшение качества регулиро ния по интегральному квадратичному критерию (примерно на 40-50%).
Iz I (Рпер-Рзд)
Дополнительным преимуществом пр ложенного регулятора является расш рение линейных режимов (ОЛР) и обу словленное этим увеличение быстрод ствия системы регулирования.
Действительно, границы ОЛР регу 45 тора в целом определяются из услов работы пропорциональной части регу лятора в стандартном диапазоне дав лений 0,2-1,0 кгс/см2:
м 0,(Рпер-Рзд) + (1-|ркп(РэА-Р0) + +РцЈ 1 ,0
MKn pnep-P A + О -У) кп 1
м 0,(Рпер-Рзд) + (1-|ркп(РэА-Р0) + +РцЈ 1 ,0
)dt.
Так как в установившемся состоянии Р( то предельно допусти„ мые изменения задания Ря относительгде К0 - коэффициент усиления регуля- , ,- . А п . .. 55 но базового значения Р0 определяются
Tnj(
тора (первый параметр настройки J ;
TYJ - время интегрирования (второй параметр настройки);
соотношениями
то -.«ад,-.
716481
10
коэффициент сглаживания, определяемый соотношением про- водимостей дросселей сумматора 2 (третий параметр настройки).
Как видим из уравнения, регулятор обладает различными динамическими характеристиками в зависимости от точки приложения возмущения: при изменениях переменной Рпер регулятор осуществляет ПИ-закон с коэффициентом усиления К„, при изменениях задания коэффициент усиления уменьшается до величины
Как следует из теории линейных систем автоматического регулирования, такие свойства регулятора должны обеспечить более высокое качество регулирования при возмущениях по заданию по сравнению и со стандартным регулятором (1) и с супервизорным регулятором-прототипом ().
Как видно из графика на фиг. 2, в системах с предложенным регулятором
обеспечивается значительное (в 2обеспечивается значительное (в 2
3 раза) уменьшение первого выбега (по сравнению со стандартным регулятором) , при этом при оптимальном выборе параметра У имеет место существенное улучшение качества регулирования по интегральному квадратичному критерию (примерно на 40-50%).
Iz I (Рпер-Рзд)
Дополнительным преимуществом предложенного регулятора является расширение линейных режимов (ОЛР) и обусловленное этим увеличение быстродействия системы регулирования.
Действительно, границы ОЛР регуля- тора в целом определяются из условий работы пропорциональной части регулятора в стандартном диапазоне давлений 0,2-1,0 кгс/см2:
м 0,(Рпер-Рзд) + (1-|ркп(РэА-Р0) + +РцЈ 1 ,0
соотношениями
то -.«ад,-.
Так как оптимальные значения параметра у (в смысле минимума 12) локализованы в интервале 0,5-0,7, то имеет место по крайней мере двух- кратное увеличение ОЛР в сторону больших значений () по сравнению с регулятором-прототипом.
По сравнению с базовым объектом, в качестве которого принят серийный регулятор з-да ТИЗПРИБОР ПР3.31М, предложенный регулятор обладает аналогичными преимуществами.
Предложенный регулятор целесообразно использовать в комбинированных пневмоэлектронных АСУ ТП, в которых УВМ реализует функций расчета и вывода задающего воздействия, а стабилизация переменных на оптимальных значениях осуществляется пневматически ми регуляторами.
Изобретение реализовано на серийных элементах и подготовлено к промышленному использованию. IФормула изоЬрете. ния
Пневматический регулятор, содержащий задатчик опорного давления, интегрирующий блОК, ПЛЮСОВОЙ И МИНУСОВОЙ ВХОДЫ которого связаны соответственно с каналами регулируемой переменной и задающего воздействия, пропорциональный блок,, выходной канал которого соединен с выходным каналом регулятора, первый плюсовой вход с каналом регулируемой переменной, а второй плюсовой вход - с выходом интегрирующего блока, о т л и ч а ю- щ и и с я тем, что, с целью улучшения качества переходных процессов, в нем установлен повторитель и дроссельный сумматор, первый вход которого соединен с задатчиком опорного давления, второй вход - с каналом задающего воздействия, а выход через повторитель связан с минусовым входом пропорционального блока. I .
s.
3r 8
Ю
CNI evi
3
lo
| Пневмоавтоматика, М., Наука, 1966, с, 96-Ю1, рис | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
