Изобретение относится к технике автоматического регулирования, а именно к устройствам с переменной структурой, и может быть использовано при автоматизации различных технологических процессов.
Известны регуляторы с переменной структурой (РПС), содержащие блок переключения, блок предварения, регулирующий блок, логический блок и блок сигнализации с зоной нечувствительности, например, пневматический регулятор с переменной структурой (авт. свид. СССР N 718834, М. Кл2 G 05 B 11/58 и G 05 B 13/00, Бюл. изобр. N 8, 1980), в котором изменяются лишь постоянная времени блока предварения и величина зоны нечувствительности блока сигнализации.
Однако поэтому известный регулятор не обладает достаточной помехозащищенностью, устойчивостью и точностью работы при управлении объектами с переменными параметрами и запаздыванием, изменяющимися в широких пределах и при действии значительных возмущений технологического процесса.
Кроме того, известны регуляторы с переменной структурой, содержащие элемент сравнения, регулирующий блок, блок переключения и блок логики, состоящий из двух блоков предварения и двух блоков релейной сигнализации, например, пневматический регулятор с переменной структурой (авт. свид. СССР N 851337, М. Кл3 G 05 B 11/58, Бюл. изобр. N 28, 1981), в котором переключаются лишь параметры дифференциальной составляющей закона регулирования.
Поэтому этот известный регулятор также не обеспечивает достаточного качества (помехозащищенности, устойчивости и точности работы) при управлении объектами с переменными параметрами и запаздыванием, изменяющимися в широких пределах и при действии значительных возмущений технологического процесса.
Наиболее близким по технической сущности к предлагаемому является регулятор с переменной структурой, содержащий блок переключения, первый и второй блоки релейной сигнализации, каждый из которых содержит сигнализаторы верхнего и нижнего отклонений, логический блок, состоящий из логических элементов: первого, второго и третьего элементов ИЛИ, первого и второго элементов И, элемента ИЛИ-НЕ, первого и второго элементов "Запрет", а также регулирующий блок, вход которого подключен к выходу элемента сравнения и входам первого и второго блоков предварения, выходы которых подключены соответственно к входам первого и второго блоков релейной сигнализации, выходы которых соединены соответственно с входами первого и второго элементов ИЛИ, выходы которых подключены к входам элемента ИЛИ-НЕ, вход первого элемента "Запрет" соединен с выходом первого элемента ИЛИ, запрещающий вход - с выходом второго элемента ИЛИ, вход второго элемента "Запрет" соединен с выходом второго элемента ИЛИ, запрещающий вход - с выходом первого элемента ИЛИ, входы первого элемента И соединены с выходами сигнализаторов верхнего отклонения, входы второго элемента И соединены с выходами сигнализаторов нижнего отклонения, выходы первого и второго элементов И подключены к входам третьего элемента ИЛИ (авт. свид. СССР N 748345, М. Кл2. G 05 B 11/58 и G 05 B 13/00, Бюл. изобр. N 26, 1980).
Однако в этом известном регуляторе изменяются только параметры регулирующего блока (закона регулирования) и остаются постоянными (без изменения) постоянные времени блоков предварения и величины зон нечувствительности в блоках релейной сигнализации, что не позволяет изменять наклон линий переключения параметров и ширину соответствующих зон нечувствительности на фазовой плоскости автоматической системы регулирования (АСР), то есть нет возможности изменять закон переключения параметров регулирующего блока в соответствии с изменяющимися условиями работы объекта управления. Это снижает качество регулирования технологических параметров, а также сужает функциональные возможности регулятора.
В предлагаемом регуляторе с переменной структурой, содержащем элемент сравнения, связанный с ним регулирующий блок и подключенный к нему задающими параметры закона управления выходами блок переключения настроек, первый и второй блоки предварения, входы которых соединены с выходом элемента сравнения, а выходы подключены соответственно к входам первого и второго блоков релейной сигнализации, каждый из которых содержит сигнализаторы верхнего и нижнего отклонений, и логический блок, состоящий из первого, второго, третьего, четвертого элементов ИЛИ, первого, второго, третьего, четвертого элементов И, элемента ИЛИ-НЕ и первого, второго, третьего, четвертого, пятого, шестого, седьмого элементов "Запрет", входы первого и второго элементов ИЛИ соединены соответственно с выходами первого и второго блоков релейной сигнализации, а их выходы подключены к входам элемента ИЛИ-НЕ, выход которого подключен к прямому входу седьмого элемента "Запрет", прямые входы первого и второго элементов "Запрет" соединены соответственно с выходами первого и второго элементов ИЛИ, а их запрещающие входы - с выходами соответственно второго и первого элементов ИЛИ, выходы первого и второго элементов "Запрет" подключены к прямым входам соответственно шестого и пятого одноименных элементов, входы первого и второго элементов И подключены к выходам сигнализаторов соответственно верхнего и нижнего отклонений первого и второго блоков релейной сигнализации, а их выходы соединены с входами третьего элемента ИЛИ, выход которого подключен к прямому входу четвертого элемента "Запрет", первые входы третьего и четвертого элементов И соединены с сигнализаторами верхнего отклонения соответственно первого и второго блоков релейной сигнализации, а вторые - с сигнализаторами нижнего отклонения соответственно второго и первого блоков релейной сигнализации, выходы третьего и четвертого элементов И подключены к входам четвертого элемента ИЛИ, выход которого соединен с прямым входом третьего элемента "Запрет", первый, второй, третий, четвертый и пятый основные входы блока переключения настроек соединены соответственно с выходами седьмого, шестого, пятого, четвертого и третьего элементов "Запрет" в логическом блоке, дополнительный вход блока переключения настроек соединен непосредственно с задающим логическим каналом, который также подключен к запрещающим входам третьего, четвертого, пятого, шестого и седьмого элементов "Запрет", соответствующие выходы блока переключения настроек соединены с параметрическими входами первого и второго блоков предварения, а также первого и второго блоков релейной сигнализации, блок переключения настроек содержит семь динамических блоков и семь переключателей шести аналоговых параметров настройки каждый, шесть задающих логических входов каждого переключателя соединены с соответствующими шестью задающими логическими входами других переключателей и шестью входами блока переключения настроек, выходы переключателей через соответствующие динамические блоки подключены к соответствующим семи выходам блока переключения настроек.
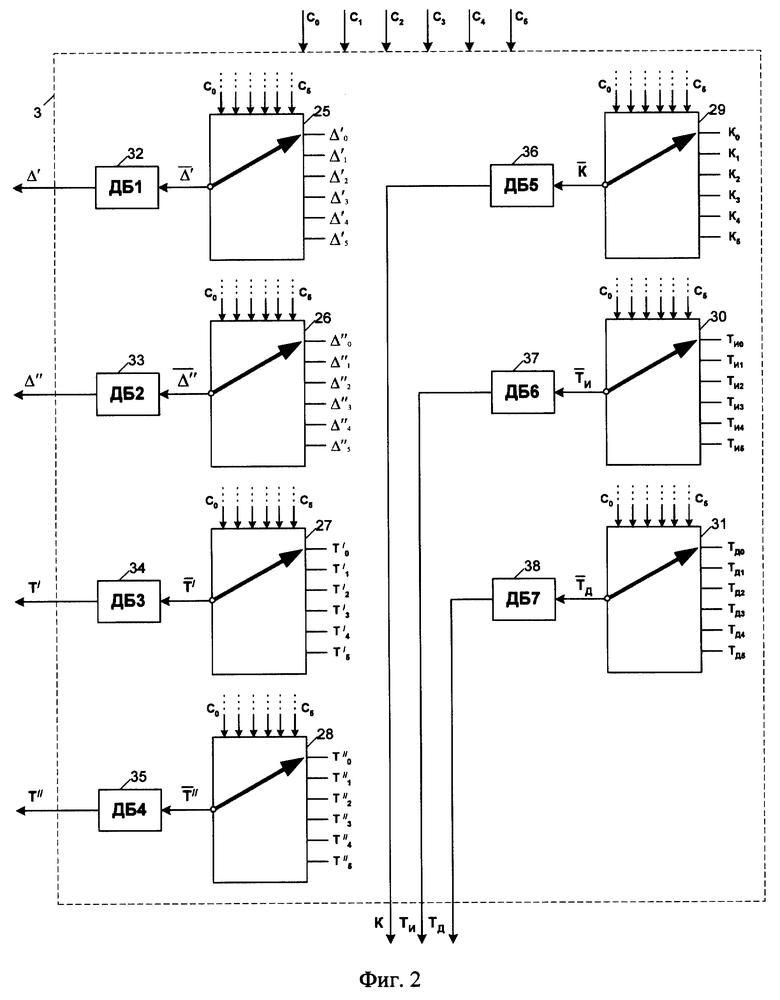
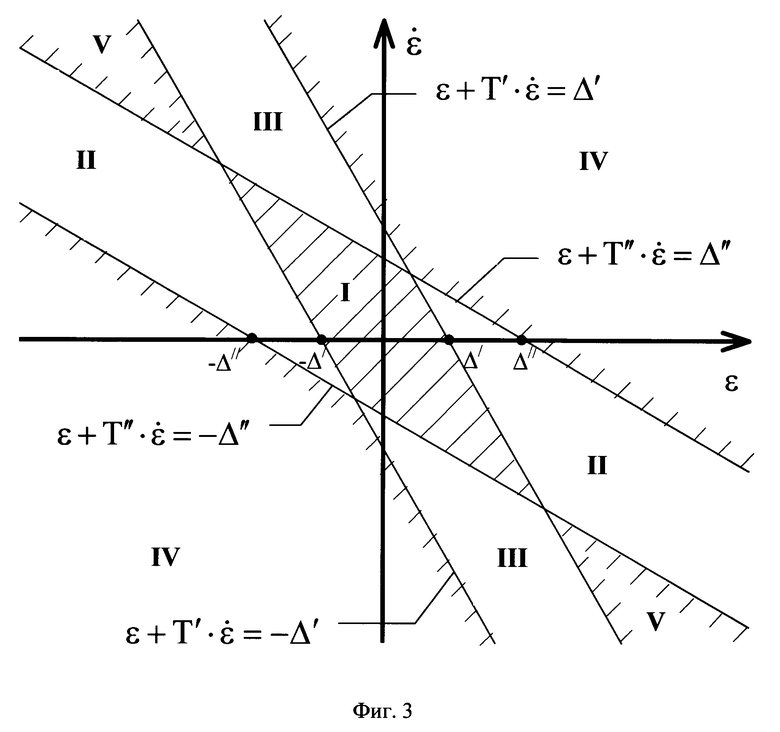
На фиг. 1 представлена блок-схема регулятора с переменной структурой; на фиг. 2 представлена схема блока переключения настроек; на фиг. 3 - разбиение фазовой плоскости АСР на области логическим устройством регулятора.
Предлагаемый регулятор содержит элемент сравнения 1, регулирующий блок (РБ) 2 для реализации стандартного ПИД-закона, блок переключения настроек (БПН) 3, два блока предварения 4, 5 (БП1 и БП2), два блока релейной сигнализации 6, 7 (БРС1 и БРС2) и логическое устройство 8, которое, в свою очередь, содержит логические элементы ИЛИ 9-12, элементы И 13 - 16, элемент ИЛИ-НЕ 17 и элементы "Запрет" 18 - 24, кроме того, БПН содержит семь переключателей шести аналоговых параметров настройки каждый 25-31, а также семь динамических блоков 32-38 (ДБ1 - ДБ7).
Каждый из двух блоков релейной сигнализации 6 и 7 содержит сигнализаторы нижнего и верхнего отклонений выходного сигнала, подключенного к нему блока предварения 4 или 5 за нижнюю и соответственно верхнюю границы зон нечувствительности (Δ′ в БРС1 и Δ″ в БРС2), значения которых устанавливаются блоком БПН3.
Выход ε элемента сравнения 1 (ошибка регулирования или сигнал рассогласования ε) соединен с сигнальными входами регулирующего блока РБ 2 и блоков предварения: первого БП1 (блок 4) и второго БП2 (блок 5), сигналы с выходов которых поступают соответственно на входы первого 6 и второго 7 блоков релейной сигнализации БРС. На входы первого 9 и второго 10 элементов ИЛИ подаются логические сигналы соответственно S1, S2 и S3, S4 от сигнализаторов нижнего и верхнего отклонений соответственно первого 6 и второго 7 блоков релейной сигнализации БРС, а выходы первого 9 и второго 10 элементов ИЛИ подключены к входам элемента ИЛИ-НЕ 17, выход которого соединен с прямым входом седьмого элемента "Запрет" 24. На прямые входы первого 18 и второго 19 элементов "Запрет" поданы сигналы с выходов соответственно первого 9 и второго 10 элементов ИЛИ, а на их запрещающие входы - с выходов соответственно второго 10 и первого 9 элементов ИЛИ, сигналы с выходов первого 18 и второго 19 элементов "Запрет" поданы на прямые входы соответственно шестого 23 и пятого 22 одноименных элементов. На входы первого 13 и второго 14 элементов И подаются сигналы S2, S4 и S1, S3 соответственно с выходов сигнализаторов верхнего и нижнего отклонения первого 6 и второго 7 блоков релейной сигнализации БРС, а выходы первого 13 и второго 14 элементов И подключены к входам третьего элемента ИЛИ 11, выход которого подключен к прямому входу четвертого элемента "Запрет" 21. На первые входы третьего 15 и четвертого 16 элементов И поданы сигналы S2 и S4 соответственно с выходов сигнализаторов верхнего отклонения первого 6 и второго 7 блоков релейной сигнализации, а на вторые - соответственно S3 и S1 с выходов сигнализаторов нижнего отклонения второго 7 и первого 6 блоков релейной сигнализации БРС, выходы третьего 15 и четвертого 16 элементов И подключены к входам четвертого элемента ИЛИ 12, сигнал с выхода которого подан на прямой вход третьего элемента "Запрет" 20. На первый - пятый основные входы блока переключения настроек БПН 3 подаются сигналы C1-C5 с выходов соответственно седьмого - третьего элементов "Запрет" 24-20 в логическом блоке 8, на дополнительный вход блока переключения настроек БПН 3 непосредственно подан сигнал P0 с задающего логического канала, который также подается на запрещающие входы третьего - седьмого элементов "Запрет" 20 - 24. Выходы блока переключения настроек T', T'' и Δ′,Δ″ соединены соответственно с параметрическими входами первого 4 и второго 5 блоков предварения, а также первого 6 и второго 7 блоков релейной сигнализации.
Регулятор работает следующим образом.
На входы элемента сравнения 1 поступают сигнал задания Y3 и текущее значение регулируемого параметра Y, а на его выходе образуется сигнал рассогласования ε. На выходе первого блока предварения 4 формируется сигнал  на выходе второго блока предварения 5 - сигнал
на выходе второго блока предварения 5 - сигнал  блоки релейной сигнализации 6 и 7 формируют следующие логические сигналы:
блоки релейной сигнализации 6 и 7 формируют следующие логические сигналы:
где обычно Δ″ > Δ′ > 0, T'' > T'; Δ′ и Δ″ - значения зон нечувствительности блоков релейной сигнализации 6, 7; T' и T'' - постоянные времени блоков предварения 4, 5; ε - сигнал рассогласования;  производная по времени сигнала рассогласования.
производная по времени сигнала рассогласования.
Логические выходные сигналы БРС1 и БРС2 S1, S2, S3, S4 поступают на входы логического блока 8 и вызывают появление на выходах логического блока сигналов, соответствующих логической "1" при следующих условиях:
C1 = "1" при  что соответствует области I на фиг. 3;
что соответствует области I на фиг. 3;
C2 = "1" при  что соответствует области II на фиг. 3;
что соответствует области II на фиг. 3;
C3 = "1" при  что соответствует области III на фиг. 3;
что соответствует области III на фиг. 3;
C4 = "1" при  что соответствует на фиг. 3 области IV, в которой выходные сигналы обоих блоков предварения имеют одинаковые знаки;
что соответствует на фиг. 3 области IV, в которой выходные сигналы обоих блоков предварения имеют одинаковые знаки;
C5 ="1" при  что соответствует на фиг. 3 области V, в которой выходные сигналы обоих блоков предварения имеют разные знаки;
что соответствует на фиг. 3 области V, в которой выходные сигналы обоих блоков предварения имеют разные знаки;
C0 = "1" при P0=1, что соответствует принудительной установке параметров настройки K0, TИ0, TД0, T'0, T''0,  независимо от значений остальных логических сигналов C1-C5.
независимо от значений остальных логических сигналов C1-C5.
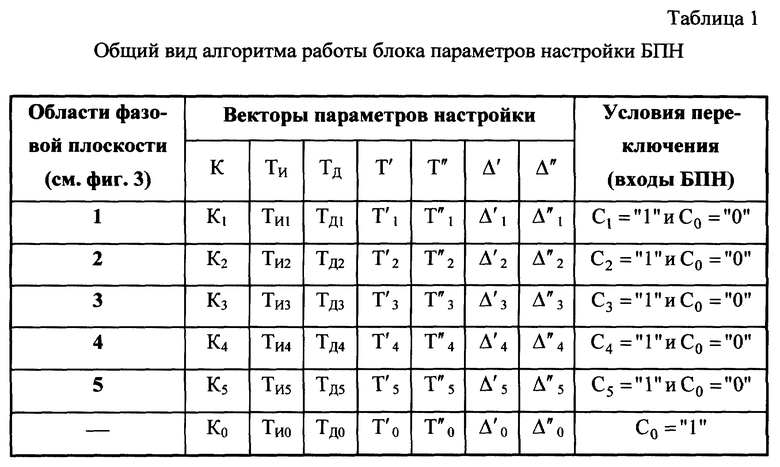
Следует отметить, что две и более логические "1" на выходах логического устройства появиться не могут. Логический блок 8 связан с блоком переключения настроек 3 логическими сигналами C0, C1, C2, C3, C4, C5, характеризующими положение рабочей точки процесса на фазовой плоскости (см. фиг. 3), так, C1= "1" соответствует области I на фиг. 3, C2= "1" - области II на фиг. 3 и так далее. При C0= "1", независимо от значений других логических сигналов, БПН 3 устанавливает значения параметров настройки K0, TИ0, TД0, T'0, T''0,  Блок переключения настроек БПН 3 в зависимости от значений логических сигналов на его входах устанавливает в регулирующем блоке 2 различные значения параметров настройки каждой составляющей ПИД-закона регулирования, а также постоянные времени блоков предварения 4, 5 и величины зон нечувствительности блоков релейной сигнализации 6, 7 (табл. 1).
Блок переключения настроек БПН 3 в зависимости от значений логических сигналов на его входах устанавливает в регулирующем блоке 2 различные значения параметров настройки каждой составляющей ПИД-закона регулирования, а также постоянные времени блоков предварения 4, 5 и величины зон нечувствительности блоков релейной сигнализации 6, 7 (табл. 1).
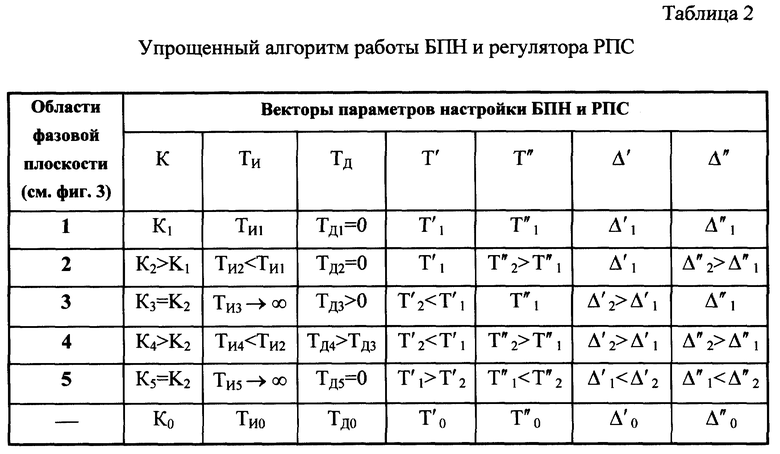
Довольно эффективным оказался следующий упрощенный алгоритм работы блока параметров настройки БПН (табл. 2) и соответственно регулятора: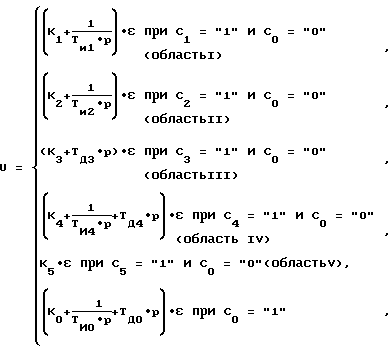
где K1, TИ1, (TД1 = 0) - настройки ПИ-регулятора с малыми коэффициентами передачи для нормального режима (область I);
K2, TИ2, TД3 - умеренные настройки ПИД-закона регулирования, соответственно пропорциональной, интегральной и дифференциальной составляющих;
K4, TИ4, TД4 - форсированные настройки ПИД-закона регулирования;
K0, TИ0, TД0 - принудительно устанавливаемые сигналом C0 настройки регулятора;
p - оператор Лапласа;
K4 > K2 > K1, TИ4 < TИ2 < TИ1, TД4 > TД3;
в скобках указаны номера областей на фиг. 3.
В табл. 2 по сути приведен алгоритм работы БПН и всего регулятора, причем условия переключения БПН полностью соответствуют табл. 1. Параметры блоков предварения БП и релейной сигнализации БРС переключаются только на двух уровнях.
Если текущие значения рассогласования и его производной малы по абсолютной величине, то есть сигналы на выходах блоков предварения 4, 5 находятся внутри установленных зон нечувствительности в блоках релейной сигнализации 6, 7, что соответствует области I на фиг. 3, то на первом выходе C1 логического блока 8 сигнал равен логической "1", который поступает на первый вход блока переключения настроек БПН 3, отключающего в регулирующем блоке РБ 2 дифференциальную составляющую закона регулирования (TД1 = 0). Оставшиеся пропорциональная (K1) и интегральная (TИ1) составляющие с малыми коэффициентами передачи (время интегрирования TИ1 велико, поэтому коэффициент передачи интегратора KИ1 мал) обеспечивают высокую степень помехозащищенности и устойчивости работы системы регулирования АСР. Блок переключения настроек БПН 3 устанавливает также малые постоянные времени T'1 и T''1 в блоках предварения 4, 5 и малые величины зон нечувствительности  в блоках релейной сигнализации 6, 7.
в блоках релейной сигнализации 6, 7.
Аналогично действие устройства и в остальных случаях, но со своими параметрами настройки для каждой из пяти областей на фиг. 3. Если сигнал на выходе какого-либо блока предварения 4 или 5 выйдет из установленной для него зоны нечувствительности, срабатывает соответствующий блок релейной сигнализации 6 или 7, что соответствует области II или III на фиг. 3, блок переключающих реле 4 выдает сигнал на втором C2 или третьем C3 выходе, блок переключения настроек 3 установит в регулирующем блоке 2 соответствующий закон регулирования: если C2 = "1", то отключена только дифференциальная составляющая закона (TД2 = 0), а во вторых блоках предварения 5 и релейной сигнализации 7 установлены большие постоянная времени T''2 > T''1 и зона нечувствительности  если же C3 = "1", то отключается интегральная составляющая ( TИЗ _→ ∞, то есть KИ3 = 0), в первом блоке предварения 4 установлена меньшая постоянная времени T'2 < T'1, а в первом блоке релейной сигнализации 6 установлена большая зона нечувствительности
если же C3 = "1", то отключается интегральная составляющая ( TИЗ _→ ∞, то есть KИ3 = 0), в первом блоке предварения 4 установлена меньшая постоянная времени T'2 < T'1, а в первом блоке релейной сигнализации 6 установлена большая зона нечувствительности 
Если регулируемая величина ε удаляется от задания Y3 или приближается к нему с очень большой скоростью (область IV на фиг. 3), в блоках релейной сигнализации 6, 7 срабатывают сигнализаторы отклонений одного типа (оба верхнего или оба нижнего). Логический блок 8 выдает сигнал C4 = "1" на четвертом выходе, а блок переключения настроек 3 по этому сигналу устанавливает форсированные настройки ПИД-закона регулирования: K4 > K2, TИ4 < TИ2, TД4 > TД3, в первом блоке предварения 4 устанавливает меньшую постоянную времени T'2 < T'1, во втором блоке предварения 5 - большую постоянную времени T''2 > T''1, а в блоках релейной сигнализации 6, 7 устанавливает большие значения зон нечувствительности 
Если регулируемая величина ε приближается к заданию со степенью затухания, заключенной в интервале (1/T'', 1/T', в блоках релейной сигнализации 6, 7 срабатывают сигнализаторы отклонений разного типа (область V на фиг. 3), то логический блок 8 выдаст сигнал C0 = "1", а блок переключения настроек 3 оставит в законе регулирования только пропорциональную составляющую K5 = K2 ≠ 0, TИ5 _→ ∞ (KИ5 = 0) и TД5 = 0 (чтобы не было больших скачков по управлению при выходе в эту область из смежных областей II и III), а в блоках предварения 4, 5 и релейной сигнализации 6, 7 устанавливаются начальные значения параметров: T'1, T''1 и 
Независимо от того, в какой из областей фазовой плоскости АСР (фиг. 3) находится рабочая точка, при подаче управляющего логического сигнала P0 = "1", а следовательно, и C0 = "1", блок переключения настроек 3 устанавливает следующие параметры настройки регулятора: K0, TИ0, TД0, T'0, T''0, 
По сравнению с известными, предлагаемый регулятор обладает лучшей помехозащищенностью автоматической системы регулирования (так как при малых значениях  работает ПИ-регулятор с малыми коэффициентами передачи: K1, TИ1, а TД1 = 0); повышает степень устойчивости системы при наличии запаздывания в объекте (за счет изменения постоянных времени блоков предварения, изменения ширины зон нечувствительности в блоках релейной сигнализации и смены структуры регулятора с упреждением не в тот момент, когда
работает ПИ-регулятор с малыми коэффициентами передачи: K1, TИ1, а TД1 = 0); повышает степень устойчивости системы при наличии запаздывания в объекте (за счет изменения постоянных времени блоков предварения, изменения ширины зон нечувствительности в блоках релейной сигнализации и смены структуры регулятора с упреждением не в тот момент, когда  а заранее, в момент, когда
а заранее, в момент, когда  причем T'' > T' и Δ″ > 0); увеличивает точность работы системы (так как форсированные параметры настроек закона регулирования устанавливаются в моменты, когда регулируемая величина удаляется от задания или приближается к нему с большой скоростью); повышает срок службы исполнительного механизма (так как скачки по управлению в моменты переключения структуры регулятора незначительны).
причем T'' > T' и Δ″ > 0); увеличивает точность работы системы (так как форсированные параметры настроек закона регулирования устанавливаются в моменты, когда регулируемая величина удаляется от задания или приближается к нему с большой скоростью); повышает срок службы исполнительного механизма (так как скачки по управлению в моменты переключения структуры регулятора незначительны).
Дополнительное повышение качества регулирования достигается за счет изменения параметров блоков релейной сигнализации и блоков предварения. Рекомендуется в форсированном режиме (область IV на фиг. 3) увеличить большую постоянную времени T'' блока предварения БП2 и уменьшить меньшую постоянную времени Т' блока предварения БП1, а зоны нечувствительности в обоих блоках релейной сигнализации увеличивать.
Кроме того, за счет добавления блока переключения настроек 3 значительно увеличиваются функциональные возможности устройства, что позволяет получать на его базе (как частные случаи) практически все известные алгоритмы обычных (линейных) регуляторов и с переменной структурой различных типов. Так например, если все элементы векторов в БПН равны (K1 = K2 = ... K5, TИ1 = TИ2 ... = TИ5, TД1 = TД2 = ... TД5), то реализуется стандартный ПИД-закон регулирования. При отсутствии зон нечувствительности (Δ′ = Δ″ = 0) имеем обычный регулятор с переменной структурой (без зон нечувствительности), работающий только в двух режимах: умеренном и форсированном - на фиг. 3 при этом остаются только области IV и V.
При постоянных K и TИ (K1 = K2 = ... K5, TИ1 = TИ2 ... TИ5) и переключаемой соответствующим образом только постоянной времени дифференцирования получаем известный регулятор с переменной структурой (авт. свид. СССР N 851337, М. Кл3 G 05 B 11/58, Бюл. изобр., 1981, N 28). При равных, но переключаемых постоянных времени блоков предварения (T' = T'' ≠ 0) и также равных, но плавно переключаемых величинах зон нечувствительности блоков релейной сигнализации БРС (Δ′ = Δ″ ≠ 0) получаем известный регулятор с переменной структурой (авт. свид. СССР N 718834, М. Кл2. G 05 B 11/58 и G 05 B 13/00, Бюл. изобр., 1980, N 8). Наиболее близкий по технической сущности регулятор с переменной структурой получается, если в таблице 1 все элементы каждого из векторов T', T'' и Δ′,Δ″ сделать одинаковыми (при этом параметрические входы блоков предварения БП и блоков релейной сигнализации БРС можно отключить от блока переключения настроек БПН), а элементы векторов K, TИ, TД подобрать соответствующим образом.
Предлагаемый регулятор с переменной структурой и расширенными функциональными возможностями можно выполнить на элементах цифровой и микропроцессорной техники, и даже на элементах и модулях промышленной пневмоавтоматики его реализация не вызывает затруднений. Довольно просто предлагаемый регулятор реализуется на микропроцессорном контроллере типа Ремиконт Р-130 с использованием алгоритма ПЕР (переключение). Причем, на контроллере Р-130 нетрудно реализовать не скачкообразное, а плавное переключение параметров настройки по какому-либо закону или с заданной скоростью изменения, что позволяет вообще избежать скачков по управлению в моменты переключения структуры регулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический регулятор с переменной структурой | 1978 |
|
SU748345A1 |
| Пневматический регулятор с переменнойСТРуКТуРОй | 1979 |
|
SU851337A1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНЫХ СИГНАЛОВ | 1999 |
|
RU2156992C1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНЫХ СИГНАЛОВ | 1998 |
|
RU2120654C1 |
| Пневматический регулятор с переменной структурой | 1978 |
|
SU718834A1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 1990 |
|
RU2047887C1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНЫХ СИГНАЛОВ | 1998 |
|
RU2120655C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| ПНЕВМАТИЧЕСКИЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНОГО СИГНАЛА | 1992 |
|
RU2050574C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2149437C1 |
Изобретение относится к технике автоматического регулирования, а именно к устройствам с переменной структурой, и может быть использовано при автоматизации различных технологических процессов. Технический результат изобретения заключается в повышении качества регулирования и расширении функциональных возможностей регуляторов. Регулятор обладает достаточной помехозащищенностью, устойчивостью и точностью работы при управлении объектами с переменными параметрами и запаздыванием, изменяющимися в широких пределах и при действии значительных возмущений технологического процесса. Регулятор может быть выполнен на элементах цифровой и микропроцессорной техники, а также на элементах и модулях пневмоавтоматики. 1 з.п. ф-лы, 3 ил., 2 табл.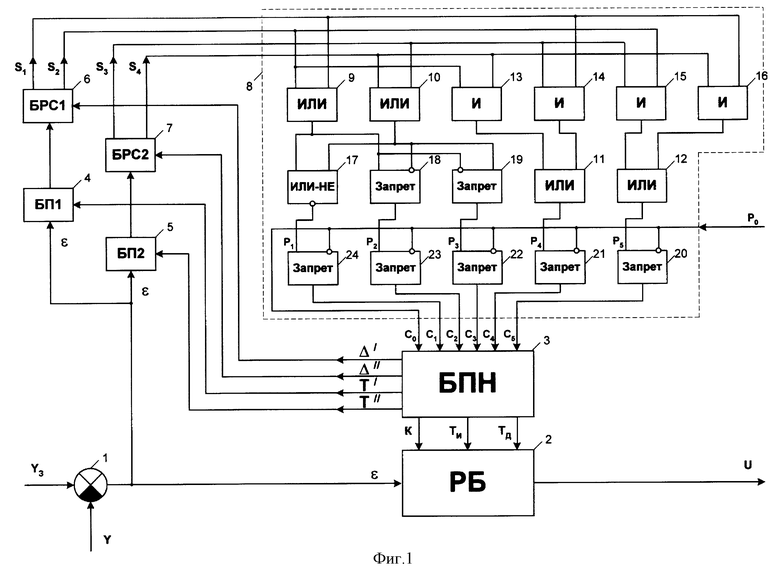
| Пневматический регулятор с переменной структурой | 1978 |
|
SU748345A1 |
| Пневматический регулятор с переменнойСТРуКТуРОй | 1979 |
|
SU851337A1 |
| Пневматический регулятор с переменной структурой | 1978 |
|
SU718834A1 |
| СПОСОБ ОПТИЧЕСКОГО ОПРЕДЕЛЕНИЯ СОДЕРЖАНИЯ КОМПОНЕНТОВ ГАЗОВОЙ СРЕДЫ | 2003 |
|
RU2238541C1 |
| Устройство для радиального направления колесных пар экипажных тележек вагонов в кривых участках пути | 1983 |
|
SU1068314A1 |
| US 4609855 А, 02.09.1986.US 4733149 А, 22.03.1988. | |||
