Изобретение относится к области систем автоматического управления, в частности к технике формирования управляющих сигналов, и может найти применение в следящих системах автоматического управления и регулирования с люфтом в механической передаче.
Известен способ автоматического управления, реализованный в следящей системе с люфтом. Данный способ заключается в суммировании усиленного регулятором сигнала ошибки с сигналом коррекции, который формируют путем преобразования сигнала, пропорционального текущему значению люфта, в сигнал с тем же знаком и с постоянной амплитудой, равной полузоне люфта, и дифференцирования полученного сигнала (А.С. N 521550 МКИ6 G 05 B 11/01. // В.Б. Житков, Н. А.Лакота и др. Следящая система с люфтом. Опубликовано 05.10.76. Бюллетень N 26).
Недостатком данного способа является то, что точность компенсации люфта существенно зависит от точности установки коэффициента пропорциональности между текущим значением люфта и непродифференцированным сигналом, а также от точности установки коэффициентов дифференциатора. К тому же данное решение конструктивно трудно осуществить, так как передаточная функция диффенциатора должна быть обратной передаточной функцией двигателя. Кроме того, в системах порядка второго и выше при прохождении люфта появляются автоколебания, что приводит к увеличению погрешности слежения, появлению ударов в механической передаче и снижению точности отработки управляющего воздействия.
Известен способ автоматического управления, который выбран в качестве прототипа для заявляемого способа. Данный способ заключается в суммировании сигнала ошибки с импульсным сигналом коррекции, который формируют в момент наличия люфта путем вычитания текущего значения люфта из сигнала, равного значению полузоны люфта и имеющего знак, совпадающий со знаком сигнала ошибки (Патент N 2114455 МКИ6 G 05 B 11/01, 5/01.// Б.В.Сухинин, Ю.Г.Нечепуренко, В.И.Ловчаков, В.В.Сурков. Способ автоматического управления в системе с люфтом и следящая система для его осуществления. Опубликовано 27.06.98. Бюллетень N 18).
Несмотря на то, что данный способ управления по формированию сигнала коррекции более удачен, чем предшествующий, однако он имеет тот же недостаток: низкие значения точностных и динамических характеристик, так как и здесь при прохождении люфта в системах порядка второго и выше появляются автоколебания, что приводит к увеличению погрешности слежения, появлению ударов в механической передаче и снижению точности отработки управляющего воздействия.
Известна следящая система с люфтом, которая содержит последовательно соединенные измеритель рассогласования сигнала задания и сигнала единичной обратной связи, регулятор, первый сумматор, двигатель с датчиком выходной координаты, нелинейное звено типа "зона нечувствительности" - модель люфта и объект управления с датчиком выходной координаты, причем выходы датчиков выходной координаты двигателя и объекта управления связаны со входами второго сумматора, выход которого через последовательно соединенные нелинейный элемент типа "насыщение" и дифференциатор подключены ко входу первого сумматора, при этом система охвачена отрицательной единичной обратной связью (А. С. N 521550 МКИ6 G 05 B 11/01.// В.Б.Житков, Н.А.Лакота и др. Следящая система с люфтом. Опубликовано 05.10.76. Бюллетень N 26).
Однако данное устройство не обеспечивает требуемой точности и динамических характеристик следящей системы с люфтом из-за погрешности установки коэффициента пропорциональности между текущим значением люфта и непродифференцированным сигналом и погрешностей установки коэффициентов дифференциатора. К тому же данное решение конструктивно трудно осуществить, так как передаточная функция дифференциатора должна быть обратной передаточной функцией двигателя. Кроме того, в системах порядка второго и выше при прохождении люфта появляются автоколебания, что приводит к увеличению погрешности слежения, появлению ударов в механической передаче и снижению точности отработки управляющего воздействия.
Известна следящая система с люфтом, которая взята в качестве прототипа для заявляемого устройства компенсации люфта в механической передаче. Данная следящая система с люфтом содержит последовательно соединенные измеритель рассогласования сигнала задания и сигнала единичной главной обратной связи, первый сумматор, регулятор, двигатель с датчиком выходной координаты, нелинейное звено типа "люфт" и объект управления с датчиком выходной координаты, выход которого соединен с вычитающим входом измерителя рассогласования, второй сумматор, один вход которого связан с выходом датчика выходной координаты двигателя, а второй вычитающий вход связан с выходом датчика выходной координаты объекта управления, выход второго сумматора связан с первым вычитающим входом третьего сумматора, второй суммирующий вход которого соединен с выходом релейного элемента, вход которого соединен с выходом измерителя рассогласования, выход третьего сумматора соединен со вторым входом первого сумматора (Патент N 2114455 МКИ6 G 05 B 11/01, 5/01.// Б.В.Сухинин, Ю. Г.Нечепуренко, В.И.Ловчаков, В.В.Сурков. Способ автоматического управления в системе с люфтом и следящая система для его осуществления. Опубликовано 27.06.98. Бюллетень 18).
Однако данное устройство также не обеспечивает требуемой точности и динамических характеристик следящей системы с люфтом из-за того, что в системах порядка второго и выше при прохождении люфта появляются автоколебания, что приводит к увеличению погрешности слежения, появлению ударов в механической передаче и снижению точности отработки управляющего воздействия.
Задачей настоящего изобретения является повышение точности компенсации люфта и улучшение динамических характеристик следящей системы порядка второго и выше путем добавления сигнала отрицательной обратной связи для безлюфтовой следящей системы, оптимальной по быстродействию к сигналу коррекции в момент наличия люфта в механической передаче.
Данная задача решается тем, что в способе автоматического управления в системе с люфтом, когда сигнал ошибки суммируют с импульсным сигналом коррекции, который формируют в момент наличия люфта путем вычитания текущего значения люфта из сигнала, равного значению полузоны люфта и имеющего знак, совпадающий со знаком сигнала ошибки, в момент наличия люфта к сигналу коррекции добавляют дополнительный сигнал отрицательной обратной связи, равный линейной комбинации сигналов жестких обратных связей (n-1) координат для безлюфтовой следящей системы, оптимальной по быстродействию.
Данный способ может быть использован в любой следящей системе с люфтом для управления механическим объектом различного типа.
Предлагаемый способ реализуется в следящей системе с люфтом, содержащей последовательно соединенные измеритель рассогласования сигнала задания и сигнала единичной главной обратной связи, первый сумматор, регулятор, безлюфтовый исполнительный механизм с датчиком выходной координаты, нелинейное звено типа "люфт" и объект управления с датчиком выходной координаты, выход которого соединен с вычитающим входом измерителя рассогласования, второй сумматор, первый вход которого связан с выходом датчика выходной координаты безлюфтового исполнительного механизма, а второй вход связан с выходом датчика выходной координаты объекта управления, релейный элемент, вход которого соединен с выходом измерителя рассогласования, третий сумматор, вычитающий вход которого соединен с выходом второго сумматора, а суммирующий вход соединен с выходом релейного элемента. В следящую систему дополнительно введены четвертый сумматор, ключ, пятый сумматор и усилители с датчиками (n-1) координат исполнительного механизма, причем выходы усилителей соединены со входами четвертого сумматора, выход которого через ключ связан с отрицательным входом пятого сумматора, положительный вход которого соединен с выходом третьего сумматора и одновременно со входом управления ключа, выход пятого сумматора связан со вторым входом первого сумматора.
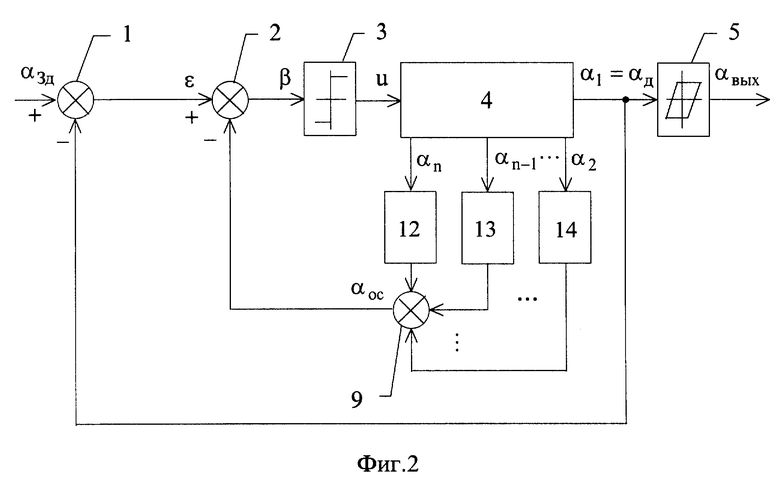
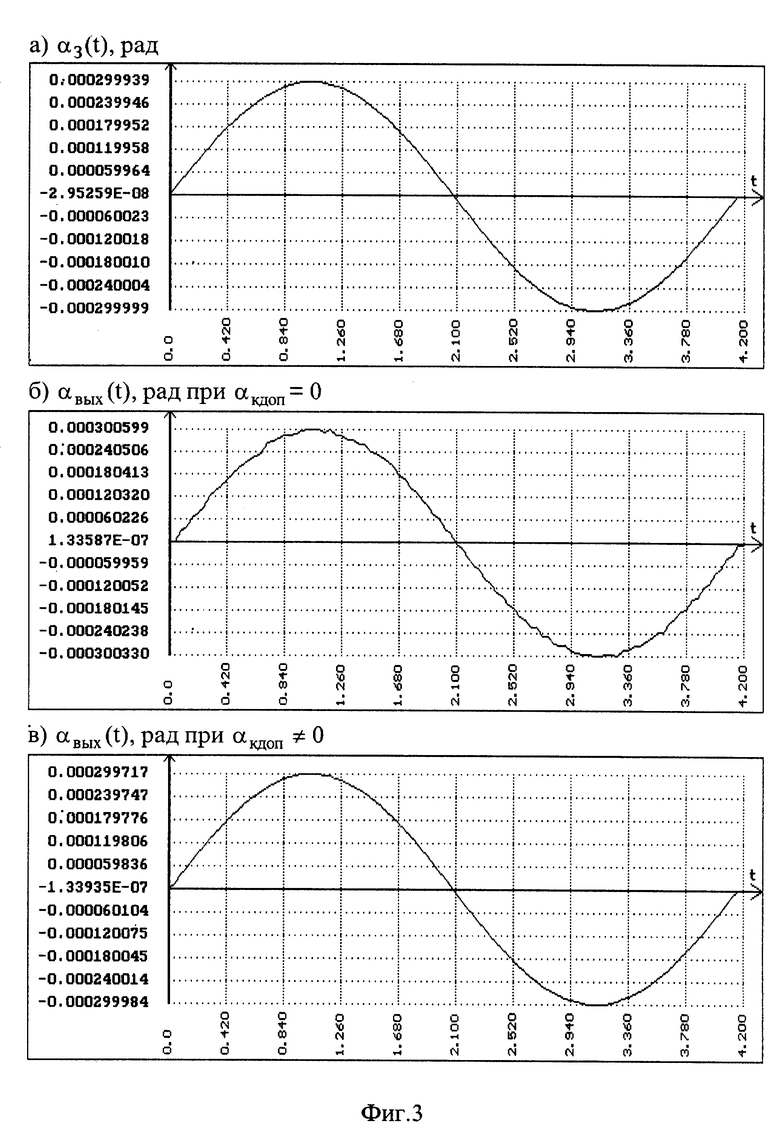
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена структурная схема следящей системы, реализующая способ автоматического управления объектом с люфтом; на фиг. 2 - структурная схема последовательного соединения безлюфтовой следящей системы, оптимальной по быстродействию, нелинейного звена типа "люфт" и объекта управления с датчиком выходной координаты; на фиг. 3 приведены временные диаграммы работы следящей системы с люфтом и безлюфтовым исполнительным механизмом третьего порядка, где:
а - диаграмма кривой задающего воздействия α3(t);
б - диаграмма кривой выходного сигнала объекта управления αвых(t) при отсутствии дополнительного сигнала коррекции αдоп= 0 (прототип);
в - диаграмма кривой выходного сигнала объекта управления αвых(t) при наличии дополнительного сигнала коррекции αдоп≠ 0 (предлагаемый способ);
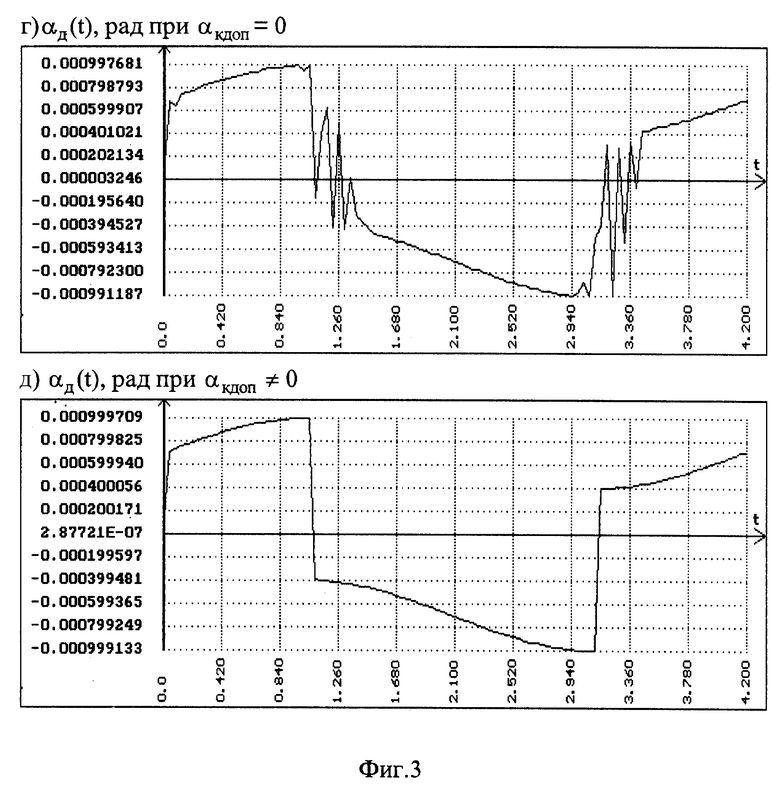
г - диаграмма кривой выходного сигнала безлюфтового исполнительного механизма третьего порядка α1= αд при отсутвии дополнительного сигнала коррекции αдоп= 0 (прототип);
д - диаграмма кривой выходного сигнала безлюфтового исполнительного механизма третьего порядка α1= αд при наличии дополнительного сигнала коррекции αдоп≠ 0 (предлагаемый способ).
В описании приняты следующие обозначения:
α3 - сигнал задания на входе следящей системы;
ε - сигнал ошибки следящей системы;
β - функция переключения на входе регулятора;
u - сигнал управляющего воздействия на выходе регулятора;
α1= αд, α2,..., αn-1, αn - параметры состояния безлюфтового исполнительного механизма n-ного порядка (фазовые координаты);
α1= αд - выходная координата (угол поворота вала) безлюфтового исполнительного механизма n-ного порядка;
f(αi) - функциональный преобразователь (n-1) координат для безлюфтовой следящей системы, оптимальной по быстродействию;
αвых - выходная координата следящей системы (угол поворота вала объекта управления);
αос - сигнал обратной связи для безлюфтовой следящей системы, оптимальной по быстродействию;
αт - текущее значение люфта;
αp - сигнал на выходе релейного элемента;
αк - импульсный сигнал коррекции;
αдоп - дополнительный сигнал;
α3д - дополнительный сигнал задания для коррекции люфта.
Система содержит последовательно соединенные измеритель рассогласования 1 сигнала задания и сигнала единичной главной обратной связи, первый сумматор 2, регулятор 3, безлюфтовый исполнительный механизм 4 n-ного порядка с датчиком выходной координаты, нелинейное звено типа "люфт" и объект управления 5 с датчиком выходной координаты, выход которого соединен с вычитающим входом измерителя рассогласования 1, второй сумматор 6, первый вход которого связан с выходом датчика выходной координаты безлюфтового исполнительного механизма 4 n-ного порядка, a второй вход связан с выходом датчика выходной координаты объекта 5, релейный элемент 7, вход которого соединен с выходом измерителя рассогласования 1, третий сумматор 8, вычитающий вход которого соединен с выходом второго сумматора 6, а суммирующий вход соединен с выходом релейного элемента 7, четвертый сумматор 9, ключ 10, пятый сумматор 11 и усилители 12, 13, ..., 14 с датчиками (n-1) координат исполнительного механизма, причем выходы усилителей 12, 13, ..., 14 соединены со входами четвертого сумматора 9, выход которого через ключ 10 связан с отрицательным входом пятого сумматора 9, положительный вход которого соединен с выходом третьего сумматора 8 и одновременно со входом управления ключа 10, выход пятого сумматора 9 связан со вторым входом первого сумматора 2.
Система работает следующим образом. При замкнутом люфте в механической передаче и увеличении сигнала задающего воздействия (фиг.3,а) α3 (при движении системы "вверх") выходная координата αд на выходе безлюфтового исполнительного механизма 4 n-ного порядка больше выходной координаты αвых объекта управления 5 точно на величину полузоны люфта αл (αд= αвых+αл, см. фиг. 1), следовательно, текущее значение люфта на выходе второго сумматора 6 αт= αд-αвых равно полузоне люфта и положительно (αт= +αл> 0). Сигнал ошибки на выходе измерителя рассогласования 1 положителен (ε = α3-αвых> 0) и сигнал на выходе релейного элемента αp= +αл, при этом сигнал коррекции αк= αp-αт равен нулю (αк= 0) и ключ 10 закрыт. Работает главная обратная связь следящей системы, и на вход регулятора 3 поступает сигнал с выхода первого сумматора 2, равный сигналу ошибки (β = ε).
При реверсе безлюфтового исполнительного механизма 4 n-ного порядка, когда сигнал задающего воздействия начинает уменьшаться, сигнал на выходе датчика выходной координаты объекта управления становится постоянным (происходит расцепление валов безлюфтового исполнительного механизма 4 n-ного порядка и объекта управления 5), вал безлюфтового исполнительного механизма 4 n-ного порядка попадает в зону люфта, главная обратная связь отключается и сигнал ошибки на выходе измерителя рассогласования 1 изменяет свой знак (ε = α3-αвых< 0), изменяется также знак и на выходе релейного элемента 7. На вход регулятора 3 с выхода сумматора 8 через сумматор 9 подается импульсный форсирующий корректирующий сигнал, фактически являющийся дополнительным заданием для прохода люфта в следящей системе с люфтом. При этом функция переключения без дополнительного сигнала коррекции αкдоп= 0, фиг.1:
или
β = α3+αл•sign(ε)-αд. (2)
Из формулы (2) следует, что для компенсации люфта необходимо на вход последовательного соединения безлюфтовой следящей системы, оптимальной по быстродействию, и нелинейного звена типа "люфт" и объекта управления с датчиком выходной координаты подать дополнительный входной сигнал задания α3д= αл•sign(ε), который скачкообразно меняется на величину зоны люфта 2αл при входе системы в зону люфта, то есть при изменении знака ошибки ε. Если безлюфтовый исполнительный механизм 4 первого порядка, то сформированного сигнала коррекции достаточно для того, чтобы безлюфтовый исполнительный механизм 4 как можно быстрее и точно прошел зону люфта, равную 2αл, то есть оптимально по быстродействию (Сухинин Б. В., Ловчаков В.И., Сурков В.В., Краснов К.В. Аналитическое конструирование регулятора для следящей системы с люфтом. "Информатика - Машиностроение", июль, август, сентябрь 1998 г.).
В действительности даже в самом простейшем случае, когда безлюфтовый исполнительный механизм 4 представлен двигателем постоянного тока с управлением по якорной цепи, он имеет второй порядок, если пренебречь постоянной времени якорной цепи; третий порядок, если учесть постоянную времени цепи якоря; четвертый порядок, если учесть постоянную времени регулируемого источника питания двигателя; пятый порядок, если в качестве источника питания выбрать электромашинный генератор (система Г-Д) или электромашинный усилитель (система ЭМУ-Д). В случае использования в безлюфтовом исполнительном механизме 4 асинхронного двигателя порядок может доходить до шести и более.
В системах порядка второго и выше безлюфтовый исполнительный механизм 4 из-за своих инерционных свойств не точно проходит зону люфта, в результате чего наблюдаются автоколебания в зоне люфта (фиг.3,г), что приводит к увеличению погрешности слежения, появлению ударов в механической передаче и снижению точности отработки управляющего воздействия (фиг.3,б). Для устранения автоколебаний в зоне люфта и повышения точности компенсации люфта необходимо, чтобы все фазовые координаты безлюфтового исполнительного механизма 4 кроме выходной αn, αn-1,..., α2 в начале и конце люфта соответствовали сигналу задания на входе следящей системы, а выходная координата α1= αд должна измениться за время прохода люфта точно на величину, равную зоне люфта 2αл.
Назовем в соответствии с терминологией Ляпунова изменение состояния безлюфтовой следящей системы во времени при замкнутом люфте невозмущенным движением, появление люфта при реверсе исполнительного механизма - возмущением, а изменение состояния следящей системы во времени в момент наличия люфта (при разомкнутом люфте) - возмущенным движением.
Рассмотрим возмущенное движение при действии дополнительного скачкообразного сигнала задания α3д= αл•sign(ε) на входе безлюфтовой следящей системы. По отношению к невозмущенному движению в возмущенном движении все фазовые координаты безлюфтового исполнительного механизма 4 кроме выходной αn, αn-1,..., α2 в начале и конце люфта должны быть равны нулю, а выходная координата α1= αд должна измениться за время прохода люфта точно на величину дополнительного скачкообразного сигнала задания α3д, равную зоне люфта 2αл.
Для повышения точности слежения, очевидно, зона люфта должна выбираться с максимально возможным в следящей системе, предельным быстродействием, то есть практически мгновенно. Поэтому в момент наличия люфта следящая система с безлюфтовым исполнительным механизмом 4 должна быть оптимальной по быстродействию и отрабатывать скачкообразные изменения задания, величина которых равна зоне люфта, то есть 2αл.
Из теории оптимального по быстродействию управления известно (Павлов А. А. Синтез релейных систем, оптимальных по быстродействие. - М.: Наука, 1966), что для системы n-ного порядка в соответствии с теоремой об n интервалах, доказанной А. А.Фельдбаумом, функция переключения β должна обладать свойством менять знак (n-1) раз и в ее формировании должны участвовать n составляющих (фазовых координат безлюфтовой системы) α1, α2,..., αn-1, αn и одна составляющая входного задающего воздействия α3.
Например, для безлюфтовой системы второго порядка, характеризующейся дифференциальными уравнениями
известно (Павлов А. А. Синтез релейных систем, оптимальных по быстродействию. - М. : Наука, 1966, стр.55), что закон оптимального по быстродействию управления имеет следующий вид:
u = umax•signβ,
Обозначим третье слагаемое формулы (4) как f(αi) - функциональный преобразователь (n-1) координат безлюфтовой следящей системы, оптимальной по быстродействию (фиг. 2), тогда сигнал отрицательной обратной связи для безлюфтовой следящей системы, оптимальной по быстродействию, можно записать так:
αос= f(αi),
а функцию переключения:
β = α3д-α1-αoc
или
β = α3д-αд-f(αi).
Для безлюфтового исполнительного механизма 4 третьего порядка и выше поиск сигнала отрицательной обратной связи для безлюфтовой следящей системы, оптимальной по быстродействию, представляет определенные математические трудности, обрекающие на неудачу принципиально разрешимую задачу синтеза оптимальных систем высокого порядка (Павлов А.А. Синтез релейных систем, оптимальных по быстродействию. - М. : Наука, 1966, стр.369). Однако, если учесть, что значение люфта 2αл в процессе работы остается неизменным, то сигнал отрицательной обратной связи для безлюфтовой следящей системы, оптимальной по быстродействию, можно определить как линейную комбинацию жестких обратных связей (n-1) координат безлюфтового исполнительного механизма 4
αос= f(αi) = K2•α2+K3•α3+...+Kn•αn.
Определение коэффициентов K2, K3, ... ,Kn производится с помощью фазового пространства, используя данные, полученные в книге (Олейников В. А. и др. Основы оптимального и экстремального управления. - М.: Высшая школа, 1969, стр.44-50, 108-109).
Например, для безлюфтовой системы третьего порядка, характеризующейся дифференциальными уравнениями

коэффициенты K2 и K3 равны
K2= 0,000009, K3=0,0000565.
С учетом невозмущенного движения в функцию переключения следует добавить α3, при этом в момент наличия люфта (при разомкнутом люфте)
β = α3+αл•sign(ε)-αд-f(αi). (5)
При замкнутом люфте в механической передаче функция переключения определяется формулой (1) при αк= 0.
Потребуем наличия в системе с люфтом главной обратной связи по выходной координате αвых, для этого добавим и вычтем αвых = в (5). После преобразований, аналогичных (1), но выполняемых в обратной последовательности, получим формулу способа автоматического управления в системе с люфтом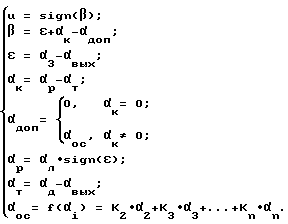
Физический смысл разработанного способа управления объектами с люфтом заключается в добавлении к сигналу коррекции в момент наличия люфта дополнительного сигнала коррекции, который формируют как сигнал отрицательной обратной связи для безлюфтовой следящей системы, оптимальной по быстродействию; как только появляется импульсный сигнал коррекции αк, на регулятор 3 и безлюфтовый исполнительный механизм n-ного порядка 4 поступает дополнительный сигнал αкдоп отрицательной обратной связи для безлюфтовой следящей системы, оптимальной по быстродействию, и он выбирает зону люфта практически мгновенно (фиг. 3, д). Выходной сигнал следящей системы αвых в точности повторяет форму входного α3 (фиг.3,в). Динамические характеристики следящей системы с люфтом с предложенным способом управления определяются характеристиками линейной системы без люфта.
Точность работы современных систем автоматического регулирования обычно ограничивается величиной зоны люфта механической передачи и объекта управления. Предлагаемый способ позволяет компенсировать люфт при любых величинах люфта и в любых системах, имеющих механические, гидравлические и пневматические передачи. Это повышает эффективность работы систем автоматического регулирования и расширяет их функциональные возможности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114455C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2143719C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2509328C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2289154C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2296355C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2149437C1 |
| Устройство для предотвращения автоколебаний в следящей системе | 1982 |
|
SU1084722A1 |
| СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 1992 |
|
RU2034695C1 |
| Следящая система | 1990 |
|
SU1805446A1 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
Изобретение относится к области систем автоматического управления, в частности к технике формирования управляющих сигналов в системе с люфтом. Технический результат заключается в повышении точности компенсации люфта и улучшении динамических характеристик следящей системы. Отличительной особенностью способа является то, что при суммировании сигнала ошибки с импульсным сигналом коррекции, который формируют в момент наличия люфта путем вычитания текущего значения люфта из сигнала, равного значению полузоны люфта и имеющего знак, совпадающий со знаком сигнала ошибки, в момент наличия люфта к сигналу коррекции добавляют дополнительный сигнал отрицательной обратной связи, равный линейной комбинации сигналов жестких обратных связей (n-1) координат для безлюфтовой следящей системы, оптимальной по быстродействию. Следящая система с люфтом для осуществления способа содержит последовательно соединенные измеритель рассогласования сигнала задания и сигнала единичной главной обратной связи, первый сумматор, регулятор, безлюфтовый исполнительный механизм с датчиком выходной координаты, нелинейное звено типа "люфт" и объект управления с датчиком выходной координаты, второй сумматор, релейный элемент, третий сумматор, четвертый сумматор, ключ, пятый сумматор и усилители с датчиками (n-1) координат исполнительного механизма. 2 с.п. ф-лы, 3 ил.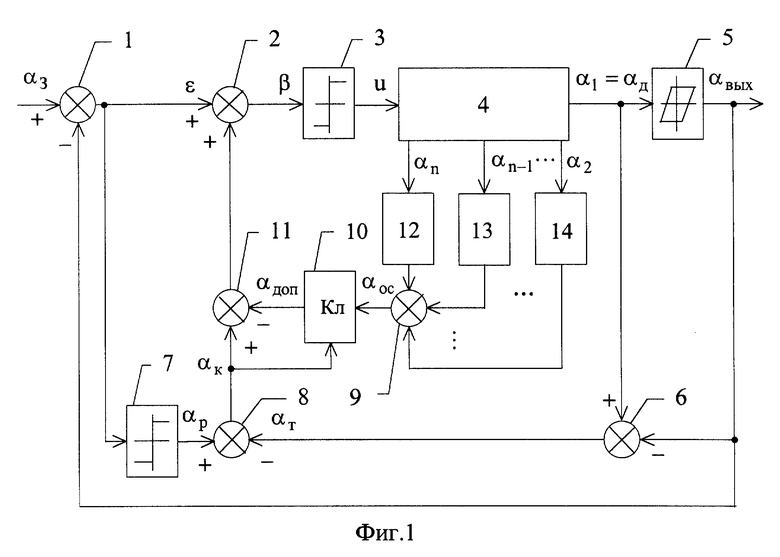
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114455C1 |
| Следящая система с люфом | 1974 |
|
SU521550A1 |
| Устройство компенсации люфта | 1979 |
|
SU1104463A1 |
| Следящий электропривод с компенсацией люфта | 1974 |
|
SU535550A1 |
| Система передачи данных | 1982 |
|
SU1080180A1 |
| US 3560830 A, 02.02.1971. | |||
