Изобретение относится к спасательным средствам, в частности к средствам обеспечения спасения личного состава аварийных подводных лодок (ПЛ) при конструктивном обеспечении герметичности стыковки подводного аппарата (ПА) с объектом в подводном положении.
Известно стыковочное устройство (см. патент 2264713, кл. B 63 G 6/40, 17.10.1975), имеющее камеру посадки и присоса с опорным фланцем и уплотнением.
Недостатком этого стыковочного устройства является то, что подводный аппарат можно посадить только на горизонтальную комингс-площадку подводного объекта.
Известны и другие технические решения стыковочных устройств, позволяющие пристыковать ПА (например, водолазный) к судовым палубным декомпрессионным комплексам "... сверху, сбоку, а иногда снизу..." (см. Г. Хаукса. "Подводная техника". Л., Судостроение, 1972, с. 255, 256). Однако такие устройства монтируются заранее и их стыковочные устройства не могут быть переориентированы для посадки на объект, имеющий иной угол наклона приемного устройства, особенно если этот угол наклона заранее не известен.
Техническим результатом изобретения является обеспечение эффективной посадки ПА на комингс-площадку подводного объекта независимо от направления и величины угла наклона комингс-площадки в условиях ограниченной возможности или невозможности маневрирования по курсу как из-за наличия течения, так и из-за отсутствия достаточного свободного пространства.
Поставленная цель достигается тем, что:
- соединение неподвижного и подвижного шаровых поясов (частей) камеры посадки и присоса между собой выполнено с помощью фланцевых разъемов с уплотняющими кольцами, установленными между фланцами, стягивающими обоймами и поворотными механизмами;
- плоскость фланцевого разъема нижнего шарового пояса расположена под углом к горизонту более половины угла наклона комингс-площадки, при котором должна быть обеспечена по техническим условиям посадка аппарата на объект;
- нижний шаровой пояс с помощью приводного механизма (редуктора) выполнен поворачивающимся вокруг наклонной оси, проходящей перпендикулярно плоскости наклонного фланцевого разъема, а другие подвижные шаровые пояса выполнены поворачивающимися вокруг вертикальных осей, проходящих через соответствующие горизонтальные фланцевые разъемы.
Это позволяет ПА, заняв любое (наиболее удобное в данной обстановке) положение над комингс-площадкой (например, курсом против течения), произвести стыковку с ней (независимо от направления и величины наклона комингс-площадки) без дополнительного маневрирования по курсу за счет того, что опорный фланец камеры посадки может быть приведен в необходимое для стыковки положение за счет вращения подвижных (нижней и средней) полусфер камеры с помощью приводных механизмов.
Суть технического решения показана на фигурах, где изображены:
фиг. 1 - ПА, стыковочное устройство которого находится в положении "по-походному", занял удобное для стыковки с подводным объектом положение (в данном случае - курсом против течения);
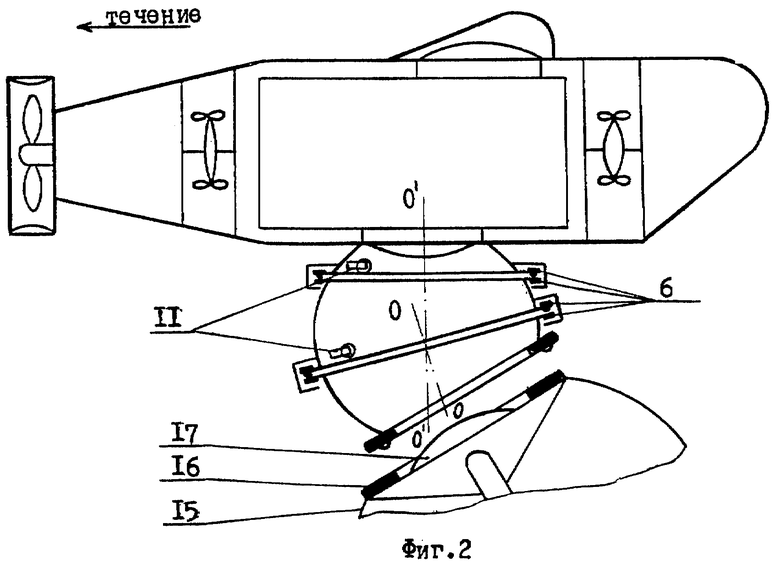
фиг. 2 - ПА, стыковочное устройство которого приведено в положение, необходимое для стыковки, осуществляет посадку на подводный объект.
Подводный аппарат 1 имеет прочный корпус 2, на котором установлена камера посадки и присоса, включающая верхний неподвижный шаровой пояс 3, средний 4 и нижний 5 шаровые пояса (части), соединенные между собой с помощью фланцев 6. Между фланцами установлены уплотнительные кольца 7, а сами фланцы соединены стягивающими обоймами 8.
Нижняя часть камеры посадки и присоса имеет опорный фланец 9, на котором установлено уплотнительное кольцо 10.
Нижняя 5 и средняя 4 части камеры посадки и присоса с помощью приводных механизмов 11 (например, редукторов с приводами) могут вращаться вокруг осей 0-0 и 0'- 0'.
В камере присоса установлен входной люк 12, на аппарате 1 установлен движительно-рулевой комплекс продольного хода 13, а для вертикального перемещения - вертикальный комплекс 14.
Подводный объект 15 снабжен приемной комингс-площадкой 16 и люком 17.
На фиг. 1 и 2 обозначены:
0-0 - ось, проходящая через центр и перпендикулярно плоскости наклонного фланцевого разъема, вокруг которой вращается нижний пояс 5;
0'- 0' - ось, вокруг которой вращается шаровой пояс 4.
При плавании ПА камера посадки и присоса находится в положении "по-походному", как показано на фиг. 1. Подводный аппарат 1, двигаясь и управляясь с помощью движительно-рулевого комплекса 13, выходит в район комингс-площадки 16 подводного объекта 15 и, заняв возможное или удобное для посадки (например, курсом против течения) положение, зависает над комингс-площадкой.
Угол наклона комингс-площадки должен быть задан в техническом задании при проектировании подводного аппарата.
Удерживаясь в этом положении, ПА с помощью редуктора 11 разворачивает сначала нижнюю часть 5 камеры посадки и присоса так, чтобы угол наклона опорного фланца 9 стал равен углу наклона комингс-площадки 16 подводного объекта 15, а затем разворачивает среднюю часть 4 (совместно с нижней частью 5) так, чтобы опорный фланец 9 занял положение, параллельное комингс-площадке 16, как показано на фиг. 2.
После этого ПА, работая вертикальным комплексом 14, опускается на комингс-площадку и прижимается к ней опорным фланцем 9. Как только опорный фланец 9 прижмется к комингс-площадке подводного объекта 15, в камере посадки и присоса резко снижается давление путем сброса из нее воды во внутреннюю цистерну аппарата. Происходит "присос" аппарата к подводному объекту.
Уплотнительные кольца 7 обеспечивают герметичность между фланцами 6, а уплотнительное кольцо 10 - между опорным фланцем 9 камеры посадки и присоса аппарата и комингс-площадкой 16 подводного объекта 15.
Наружным гидростатическим давлением аппарат через неподвижную и подвижные шаровые пояса прижимается к комингс-площадке объекта. Создается жесткая и герметичная система сообщения, позволяющая после откачки воды из камеры посадки и присоса открыть люк 12 аппарата, люк 17 подводного объекта и принять или передать людей и грузы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СТЫКОВКИ СПАСАТЕЛЬНОГО ПОДВОДНОГО АППАРАТА С ПОДВОДНЫМ ОБЪЕКТОМ И СПОСОБ СТЫКОВКИ С ЕГО ИСПОЛЬЗОВАНИЕМ | 2004 |
|
RU2250858C1 |
| ПОДВОДНЫЙ АППАРАТ С ПОВОРОТНОЙ КАМЕРОЙ СТЫКОВКИ И ПРИСОСА И УСТРОЙСТВОМ ЦЕНТРИРОВАНИЯ И ПОДТЯГИВАНИЯ | 2011 |
|
RU2468961C1 |
| Спасательный подводный аппарат | 2018 |
|
RU2736510C2 |
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2004 |
|
RU2276647C1 |
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2003 |
|
RU2248300C1 |
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2016 |
|
RU2615029C1 |
| Водолазно-спасательный глубоководный аппарат | 2020 |
|
RU2764140C1 |
| ПОДВОДНЫЙ АППАРАТ | 2003 |
|
RU2239581C1 |
| УСТРОЙСТВО ДЛЯ ПРОВЕРКИ КОМИНГС-ПЛОЩАДОК И СПАСАТЕЛЬНЫХ ЛЮКОВ ПОДВОДНЫХ ЛОДОК | 2002 |
|
RU2334645C2 |
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2007 |
|
RU2334650C1 |
Изобретение относится к спасательным средствам, в частности к средствам обеспечения спасения личного состава аварийных подводных лодок при конструктивном обеспечении герметичности стыковки подводного аппарата с объектом в подводном положении. Стыковочное устройство для подводного аппарата, включающего движительно-рулевой комплекс, содержит камеру посадки и присоса с опорным фланцем и уплотнением. Камера посадки и присоса выполнена из двух или более поворачивающихся поворотным механизмом относительно друг друга шаровых поясов, соединенных между собой с помощью фланцевых разъемов с уплотнениями и стягивающих обойм. Верхняя плоскость разъема нижнего шарового пояса расположена под углом не меньше половины предполагаемого угла наклона комингс-площадки объекта, на который по техническим условиям предусмотрена посадка подводного аппарата. Достигается возможность эффективной посадки подводного аппарата на комингс-площадку подводного объекта независимо от направления и величины угла наклона комингс-площадки. 2 ил.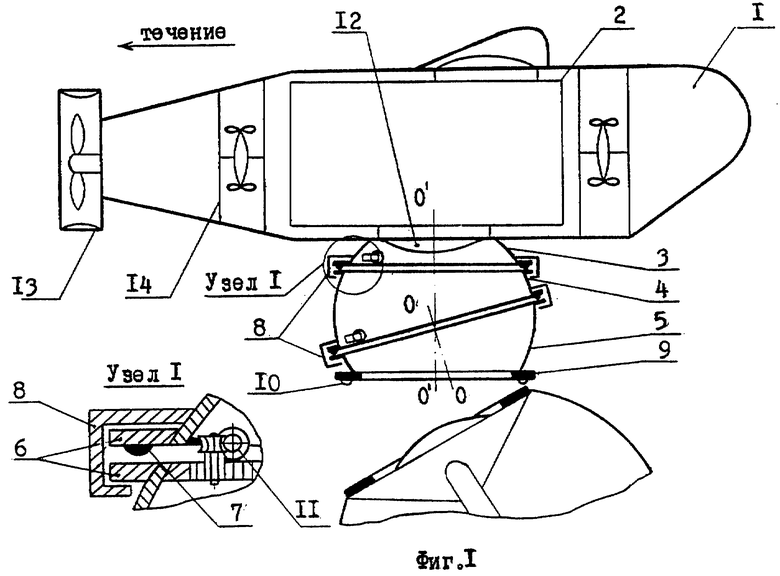
Стыковочное устройство для подводного аппарата, включающего движительно-рулевой комплекс, содержащее камеру посадки и присоса с опорным фланцем и уплотнением, отличающееся тем, что камера посадки и присоса выполнена из двух или более поворачивающихся поворотными механизмами относительно друг друга шаровых поясов, соединенных между собой с помощью фланцевых разъемов с уплотнениями и стягивающих обойм, при этом верхняя плоскость разъема нижнего шарового пояса расположена под углом не меньше половины предполагаемого угла наклона комингсплощадки объекта, на который по техническим условиям предусмотрена посадка подводного аппарата.
| НОЖ ОТВАЛА ГРЕЙДЕРА | 2007 |
|
RU2379428C2 |
| УСТРОЙСТВО ДЛЯ УДЕРЖАНИЯ И ТРАНСПОРТИРОВАНИЯ ВЯЗКОУПРУГОПЛАСТИЧНЫХ И ВЯЗКОПЛАСТИЧНЫХ ПИЩЕВЫХ МАСС | 2004 |
|
RU2264713C1 |
| Хаукса Г | |||
| Подводная техника | |||
| - Л.: Судостроение, 1972, с | |||
| Гудок | 1921 |
|
SU255A1 |

