Изобретение относится к подводному судостроению, в частности к спасательным подводным аппаратам (СПА), предназначенным для спасения экипажей аварийных подводных лодок (ПЛ) и других обитаемых и подводных объектов, предназначенных для выполнения подводно-технических работ и стыкующихся под водой с другими подводными объектами, имеющими специальные стыковочные узлы для стыковки с ПА.
Известно много зарубежных и отечественных подводных аппаратов, стыкующихся под водой с другими подводными объектами. Наиболее характерными из них являются СПА, предназначенные для спасения экипажей аварийной ПЛ путем стыковки с ее комингс-площадкой, приема спасаемых подводников в СПА и доставки их на надводное спасательное судно или другую ПЛ.
Аналогами могут служить: отечественный СПА по патенту №2082646; зарубежные СПА: “Remora” (Австралия), S-SRV (Швеция), S-SRV (Италия), СПА, входящий в единую систему оказания помощи аварийной ПЛ NSRS-НАТО Submarine Rescue System, в разработке которой участвуют ВМС Великобритании, Франции, Норвегии и Турции, СПА, входящий в глубоководный спасательный декомпрессионный комплекс SRDRS ВМС США (“Дайджест” зарубежной прессы, выпуск №3), и другие СПА.
Как показывает опыт эксплуатации отечественных СПА, одной из самых ответственных и сложных операций по спасению экипажей аварийных ПЛ является операция стыковки СПА со стыковочным узлом (комингс-площадка аварийно-спасательного люка ПЛ) аварийной ПЛ. Точность стыковки камеры присоса СПА с комингс-площадкой аварийной ПЛ для обеспечения последующей герметизации узла стыковки должна быть довольно высока (±60...70 мм). Достичь такой точности оператору СПА при ручном управлении движением СПА довольно сложно. Сложность операции усугубляется наличием подводных течений, наличием кренов и дифферентов аварийной ПЛ, недостаточной прозрачностью воды. Успешность выполнения операции стыковки в большой степени зависит от тренировки личного состава СПА.
Целью предлагаемого изобретения является создание конструкции подводного аппарата, обеспечивающего автоматическую стыковку его с подводным объектом. Рассмотрим конструкцию предлагаемого аппарата на примере СПА.
На СПА устанавливается телевизионная стереопара (две телевизионные камеры, расположенные рядом). Стереопара ориентирована так, что в зоне ее видимости одновременно находятся стыковочный узел СПА и стыковочный узел аварийной ПЛ, с которой планируется стыковка СПА. На СПА также устанавливается электронно-вычислительная машина (ЭВМ), связанная со стереопарой и получающая от нее видеосигнал. Предварительно в память ЭВМ вводится изображение (геометрия и цветовое отличие) стыковочного узла аварийной ПЛ. ЭВМ, получив сигнал о телевизионном изображении стыковочного узла аварийной ПЛ, идентифицировав его с изображением стыковочного узла, заложенного в память ЭВМ, вырабатывает управляющий сигнал и передает его через систему управления движением аппарата движительно-рулевому комплексу СПА, который обеспечивает автоматическое сближение и последующую стыковку СПА с комингс-площадкой аварийной ПЛ.
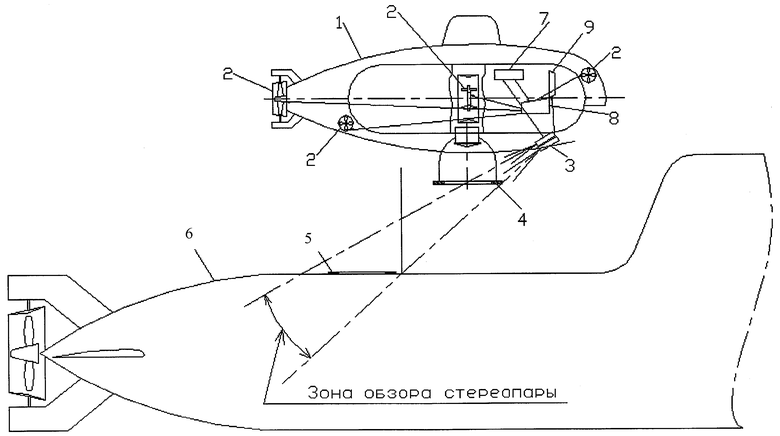
Схема предлагаемого СПА, стыкующегося с аварийной ПЛ, представлена на чертеже.
СПА 1 имеет движительно-рулевой комплекс 2, стереопару 3, ориентированную на стыковочный узел СПА 4, и стыковочный узел 5 аварийной ПЛ 6. На СПА установлена также ЭВМ 7, электрически связанная со стереопарой 3 и системой управления движением 8, а также телевизионный монитор 9 для вывода изображения, поступающего от стереопары.
Технология автоматической посадки СПА на аварийную ПЛ заключается в следующем.
СПА 1 с использованием собственной гидроакустической аппаратуры и наведения с судна-носителя обнаруживает аварийную ПЛ 6 и сближается с ней до установления телевизионного изображения аварийной комингс-площадки ПЛ 5 на телевизионном мониторе 9. При этом на мониторе появляется информация от ЭВМ об идентификации заложенного в память ЭВМ изображения стыковочного узла 5 с появившимся его изображением на телевизионном мониторе 9. Получив указанную информацию, оператор СПА дает команду ЭВМ на осуществление автоматической стыковки СПА с комингс-площадкой 5 аварийной ПЛ 6. ЭВМ 7 с учетом положения СПА 1 относительно аварийной ПЛ 6 вырабатывает и выдает сигнал в систему управления движением СПА 8 и через нее на движительно-рулевой комплекс СПА 2 на осуществление сближения и стыковки СПА с аварийной ПЛ 6.
Аналогичным образом подводные аппараты других назначений, сконструированные с использованием предлагаемого изобретения, могут осуществлять стыковку с любыми другими подводными объектами, имеющими стыковочный узел для стыковки с подводным аппаратом.
В настоящее время разработан технический проект СПА с использованием предлагаемого изобретения. В 2003 году планируется разработка рабочих чертежей на строительство такого аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2016 |
|
RU2615029C1 |
| Водолазно-спасательный глубоководный аппарат | 2020 |
|
RU2764140C1 |
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2003 |
|
RU2248300C1 |
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2004 |
|
RU2276647C1 |
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2007 |
|
RU2334650C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ КОМПЛЕКС ДЛЯ ВЫПОЛНЕНИЯ ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2000 |
|
RU2220880C2 |
| УСТРОЙСТВО ДЛЯ СТЫКОВКИ СПАСАТЕЛЬНОГО ПОДВОДНОГО АППАРАТА С ПОДВОДНЫМ ОБЪЕКТОМ И СПОСОБ СТЫКОВКИ С ЕГО ИСПОЛЬЗОВАНИЕМ | 2004 |
|
RU2250858C1 |
| СПАСАТЕЛЬНАЯ АВИАДЕСАНТИРУЕМАЯ СИСТЕМА | 2019 |
|
RU2707860C1 |
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 1999 |
|
RU2170191C2 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО ДЛЯ ПОДВОДНОГО АППАРАТА | 1996 |
|
RU2157776C2 |
Изобретение относится к подводному судостроению, в частности к спасательным подводным аппаратам (СПА). Подводный аппарат содержит движительно-рулевой комплекс, систему управления движением, аппаратуру подводного телевидения, стыковочный узел для стыковки с другим подводным объектом. На СПА установлены телевизионная стереопара (две телевизионные камеры, расположенные рядом), ориентированная так, чтобы в зоне ее видимости находились одновременно стыковочные узлы СПА и аварийной подводной лодки (ПЛ), и электронно-вычислительная машина, получающая от стереопары видеосигнал и преобразующая его в управляющий сигнал, передаваемый через систему управления движением СПА движительно-рулевому комплексу СПА на автоматическую стыковку СПА с комингс-площадкой аварийной ПЛ. Достигается автоматическая стыковка подводного аппарата с подводным объектом. 1 ил.
Подводный аппарат, имеющий движительно-рулевой комплекс, систему управления движением, аппаратуру подводного телевидения, стыковочный узел для стыковки с другим подводным объектом, отличающийся тем, что на аппарате установлены одна или несколько телевизионных стереопар (две телевизионные камеры, установленные рядом), ориентированных так, что в зону их видимости одновременно попадают стыковочные узлы подводного аппарата и подводного объекта, с которым планируется стыковка подводного аппарата, и электронно-вычислительная машина, преобразующая телевизионный сигнал от стереопар в управляющий сигнал движительно-рулевому комплексу для автоматического сближения и стыковки подводного аппарата с подводным объектом.
| СПАСАТЕЛЬНО-РАБОЧИЙ ПОДВОДНЫЙ АППАРАТ | 1992 |
|
RU2082646C1 |
| ПОДВОДНЫЙ ПОИСКОВЫЙ АППАРАТ | 1991 |
|
RU2039678C1 |
| НОЖ ОТВАЛА ГРЕЙДЕРА | 2007 |
|
RU2379428C2 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО ДЛЯ ПОДВОДНОГО АППАРАТА | 1996 |
|
RU2157776C2 |

