Изобретение относится к средствам спасения экипажей, аварийных подводных лодок (ПЛ) в подводном положении с использованием спасательного подводного аппарата (СПА).
Известно стыковочное устройство (патент Франции №2264713, МПК В 63 G 6/40, публ. 17.10.75), выполненное в виде камеры посадки и присоса с опорным фланцем и уплотнением.
Недостатком известного стыковочного устройства является ограниченность эксплуатационных характеристик, поскольку ее можно состыковать только с горизонтальной комингс-площадкой подводного объекта.
Известное устройство реализует способ стыковки камеры посадки и присоса, предусматривающий позиционирование камеры в горизонтальной плоскости вблизи комингс-площадки аварийного подводного объекта лишь при ее горизонтальном залегании, что существенно ограничивает возможности проведения стыковки с аварийным подводным объектом.
Известны и другие стыковочные устройства, позволяющие пристыковать подводный аппарат (ПА), например, водолазный, к судовым палубным декомпрессионным комплексам “...сверху, сбоку, а иногда снизу...” (Г.Хаукса. Подводная техника. Л.: Судостроение, 1972, с.255, 256). Однако такие стыковочные устройства не могут быть переориентированы для посадки на объект, имеющий иной угол наклона приемного устройства, особенно, если этот угол наклона не известен заранее.
Известно устройство для стыковки СПА с подводным объектом, преимущественно, с аварийной ПЛ, включающее камеру посадки и присоса с опорным фланцем и уплотнениями, корпус которой включает верхний пояс, жестко связанный с неподвижным элементом, промежуточный и нижний пояса, выполненные с возможностью поворота поясов с помощью механизма поворота, размещенного внутри камеры, которые соединены между собой фланцевыми разъемами со стягивающими обоймами, причем промежуточный пояс выполнен таким, что нижняя плоскость его разъема составляет с верхней плоскостью его разъема угол, не меньший половины максимального угла наклона комингс-площадки подводного объекта, на который предусмотрена посадка (патент PФ №2157776, МПК В 63 G 8/40, публ. 20.10.2000).
Недостаток известного стыковочного устройства СПА заключается в ухудшении условий проведения спасательных операций, затруднении прохода личного состава сквозь камеру посадки и присоса вследствие размещения механизма поворота промежуточного и нижнего поясов, выполненного в виде двух передач, управляющих поворотом каждого из поясов, внутри этой камеры и уменьшения полезного объема последней, а также в отсутствии элементов смыкания-размыкания разъемов фланцев поворотных шаровых сегментов корпуса камеры посадки и присоса, необходимых для обеспечения как герметичности за счет исключения зазоров в месте уплотнения, так и легкости разворота фланцев за счет создания этих зазоров. Кроме того, наличие отверстий для прохода поворотных механизмов через “стенки” поясов камеры посадки и присоса также является недостатком, т.к. снижает надежность как устройства, так и ПА в целом.
Известное устройство для стыковки СПА с подводным объектом, преимущественно, аварийной ПЛ, включающее закрепленную на неподвижном основании камеру посадки и присоса с опорным фланцем и уплотнениями, выполненную из верхнего, промежуточного и нижнего поясов, сопряженных между собой посредством фланцев со стягивающими обоймами, а также механизмом поворота промежуточного и нижнего поясов, выполненных в виде двух передач, при этом верхний пояс жестко связан с неподвижным основанием, а промежуточный пояс выполнен таким, что нижняя плоскость его разъема образует с верхней плоскостью его разъема угол, не меньший половины максимального угла наклона комингс-площадки подводного объекта, выбрано в качестве наиболее близкого аналога заявляемого изобретения.
Известное устройство реализует способ стыковки СПА с подводным объектом, преимущественно, аварийной ПЛ, с использованием устройства для стыковки в виде камеры посадки и присоса, выполненной из шаровых поясов (сегментов), подвижных относительно друг друга /патент РФ №2157776, МПК В 63 G 8/40, публ. 21.10.2000/. Способ включает позиционирование подводного аппарата над подводным объектом, перемещения поворотных шаровых сегментов корпуса камеры посадки и присоса путем поворота последовательно нижнего, а затем промежуточного шаровых поясов с возможностью параллельного размещения плоскостей стыковочного фланца камеры посадки и присоса и комингс-площадки подводного объекта, присоединение упомянутой камеры СПА к комингс-площадке аварийной ПЛ, с образованием переходной камеры и осушение переходной зоны. Известный способ стыковки позволяет осуществлять аварийные работы при наклонном положении комингс-площадки аварийной ПЛ, однако он характеризуется длительностью и трудностями проведения работ вследствие отсутствия возможности смыкания-размыкания разъемов фланцев поворотных шаровых сегментов корпуса камеры посадки и присоса для обеспечения как их герметичности, так и легкости относительного разворота, а также пониженной пропускной способностью переходной камеры.
Известный способ стыковки СПА с подводным объектом, преимущественно, аварийной ПЛ, с использованием устройства для стыковки, включающего камеру посадки и присоса, имеющую корпус с подвижными поясами, который предусматривает позиционирование спасательного подводного аппарата над подводным объектом в подводном положении, перемещения поворотных шаровых сегментов корпуса камеры посадки и присоса путем поворота последовательно нижнего, а затем промежуточного шаровых поясов с возможностью параллельного размещения плоскостей стыковочного фланца камеры посадки и присоса и комингс-площадки подводного объекта, последующее присоединение упомянутой камеры к комингс-площадке подводного объекта с образованием переходной зоны и осушение переходной зоны, выбрано в качестве ближайшего аналога заявляемого устройства.
Задача изобретения заключается в улучшении эксплуатационных характеристик СПА, а также повышении эффективности спасения экипажей с аварийных ПЛ, надежности и быстроты проведения стыковки и оказания помощи терпящим бедствие.
Задача решена тем, что в известном устройстве для стыковки спасательного подводного аппарата с подводным объектом, преимущественно, аварийной подводной лодкой, включающем закрепленную на неподвижном основании камеру посадки и присоса с опорным фланцем и уплотнениями, выполненную из верхнего, промежуточного и нижнего поясов, сопряженных по разъемам посредством фланцев со стягивающими обоймами, а также механизм поворота промежуточного и нижнего поясов, при этом верхний пояс жестко связан с неподвижным основанием, а промежуточный пояс выполнен таким, что нижняя плоскость его разъема образует с верхней плоскостью его разъема угол, не меньший половины максимального угла наклона комингс-площадки подводного объекта, в соответствии с изобретением, упомянутый механизм поворота промежуточного и нижнего поясов установлен снаружи поясов и выполнен в виде эпициклической передачи, содержащей центральное зубчатое колесо, укрепленное на неподвижном основании или на верхнем поясе с возможностью вращения относительно вертикальной оси верхнего разъема промежуточного пояса, солнечное зубчатое колесо, жестко связанное с нижним поясом, ось которого совмещена с наклонной осью нижнего разъема промежуточного пояса, а также связанные гибкой связью планетарные зубчатые колеса, шарнирно установленные на промежуточном поясе с обеспечением зацепления с упомянутыми центральным и солнечным зубчатым колесами, причем центральное зубчатое колесо связано с источником движения, жестко связанным с неподвижным основанием, а стягивающие обоймы разъемов фланцев поясов снабжены индивидуальными гидродвигателями смыкания-размыкания разъемов фланцев.
Кроме того, солнечное колесо установлено под углом к вертикальной оси промежуточной камеры, не меньшим половины максимального угла наклона комингс-площадки подводного объекта, на который предусмотрена посадка.
Кроме того, в качестве неподвижного основания выбран корпус спасательного подводного аппарата.
Задача решена также тем, что в известном способе стыковки спасательного подводного аппарата с подводным объектом, преимущественно аварийной подводной лодкой, с использованием устройства для стыковки, включающего камеру посадки и присоса, имеющую корпус с подвижными поясами, предусматривающем позиционирование спасательного подводного аппарата над подводным объектом в подводном положении, поворот нижнего и промежуточного шаровых поясов с возможностью параллельного размещения плоскостей стыковочного фланца упомянутой камеры и комингс-площадки подводного объекта, последующее присоединение упомянутой камеры к комингс-площадке подводного объекта с образованием переходной зоны и осушение переходной зоны, в соответствий с изобретением, при позиционировании спасательного подводного аппарата обеспечивают возможность относительного перемещения нижнего пояса упомянутой камеры, разворачивают нижний пояс упомянутой камеры до обеспечения равенства углов наклона плоскости опорного фланца упомянутого пояса и комингс-площадки аварийного подводного объекта к горизонтальной плоскости, затем сопрягают промежуточный и нижний пояса упомянутой камеры и обеспечивают возможность их совместного перемещения относительно верхнего пояса, а параллельность плоскости стыковочного фланца и комингс-площадки обеспечивают путем разворота сопряженных промежуточного и нижнего поясов упомянутой камеры относительно ее вертикальной оси, после чего сопрягают промежуточный и верхний пояса упомянутой камеры.
Техническим результатом изобретения является увеличение полезного объема камеры посадки и присоса без увеличения ее габаритов за счет размещения поворотных механизмов снаружи камеры (забортный привод), исключение отверстий в стенках камеры для прохода поворотных механизмов, обеспечение быстроты и герметичности стыковки СПА с аварийным объектом в подводном положении.
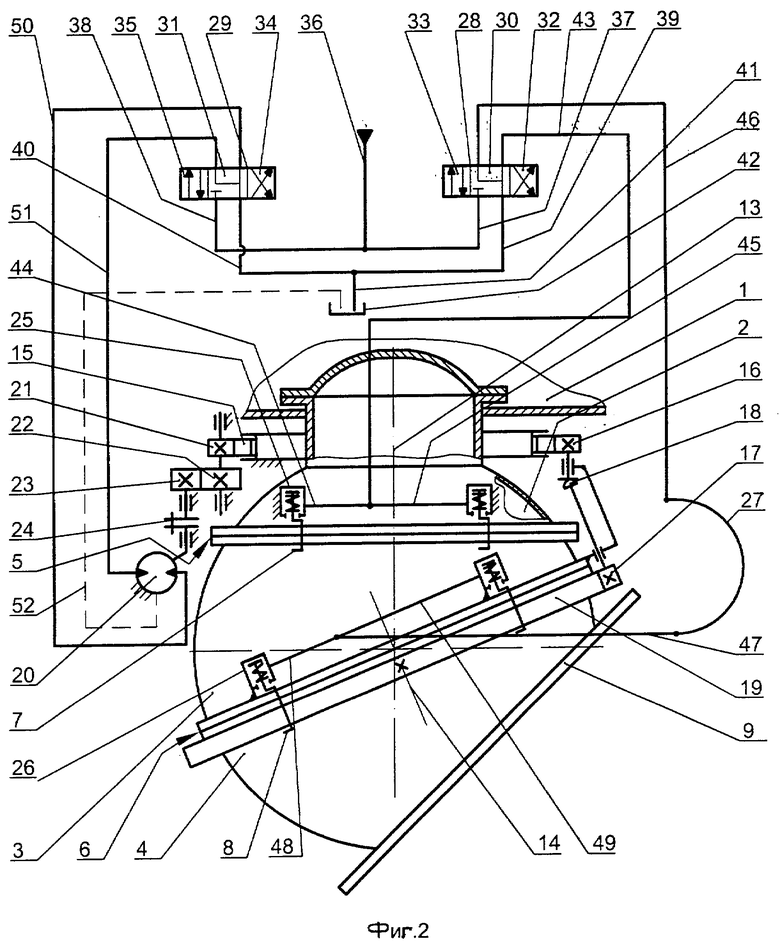
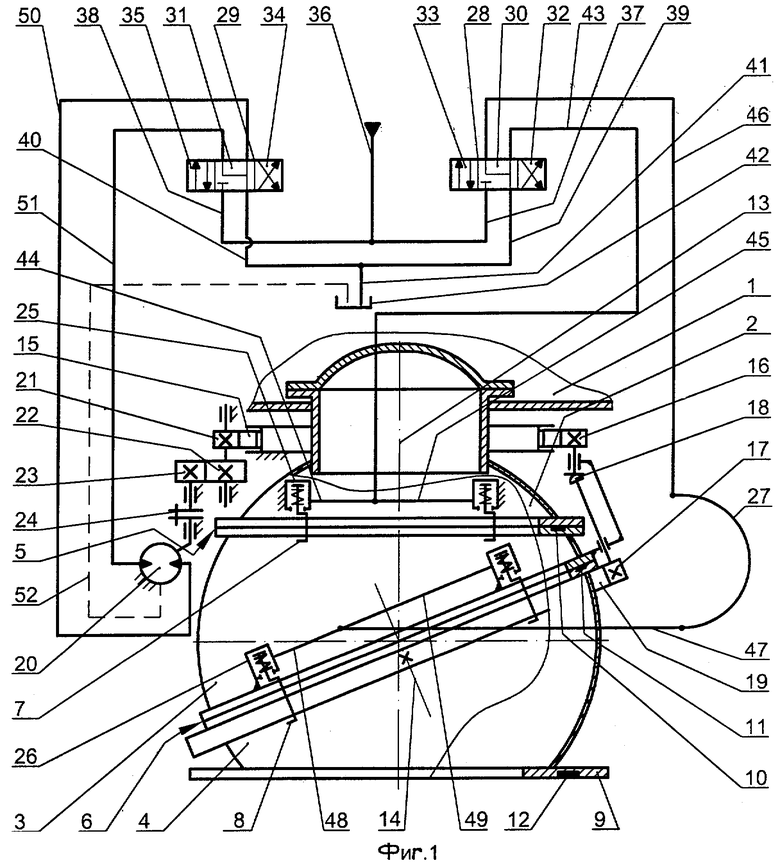
Сущность изобретения поясняется фиг.1, на которой представлен общий вид камеры посадки и присоса, и фиг.2, на которой представлена та же камера в положении готовности к стыковке с комингс-площадкой, лежащей под углом к вертикальной оси камеры.
Устройство для стыковки СПА содержит (фиг.1) установленную на основном корпусе 1 СПА камеру посадки и присоса, включающую верхний пояс 2, жестко связанный с основным корпусом 1, а также промежуточный пояс 3 и нижний пояс 4, которые выполнены с нормально замкнутыми фланцевыми разъемами 5 и 6, снабженными подпружиненными стягивающими обоймами 7 и 8. С нижним поясом 4 камеры посадки и присоса жестко соединен опорный фланец 9, обеспечивающий посадку камеры на аварийный объект. Верхняя плоскость разъема 5 промежуточного пояса 3 горизонтальна, а его нижняя плоскость разъема 6 расположена под углом, не меньшим половины максимального угла наклона комингс-площадки объекта, на который предусмотрена посадка. Фланцы поясов 2, 3, 4 камеры посадки и присоса снабжены уплотнениями 10, 11 и 12. Верхний пояс 2 и промежуточный пояс 3 соосны, вертикальная ось 13 является осью и верхнего разъема и вращения промежуточного пояса 3, а вращение нижнего пояса 4 происходит вокруг наклонной оси 14 нижнего разъема промежуточного пояса 3, перпендикулярной плоскости фланцевого разъема 6 между промежуточным 3 и нижним 4 поясами. Поворот промежуточного 3 и нижнего 4 поясов осуществляется при помощи поворотного механизма, размещенного снаружи камеры посадки и присоса и выполненного в виде эпициклической (включающей звенья, совершающие вращение вокруг подвижной оси) передачи.
Поворотный механизм содержит центральное зубчатое колесо 15, укрепленное на корпусе 1 или на верхнем поясе 2 с возможностью вращения относительно оси 13, планетарные зубчатые колеса 16 и 17, шарнирно связанные с промежуточным поясом 3 и соединенные между собой гибкой связью 18 (шарнирной муфтой), а также содержит солнечное зубчатое колесо 19, жестко связанное с нижним поясом 4, при этом ось солнечного зубчатого колеса 19 совмещена с осью 14. Попарно зубчатые колеса 15 и 16, а также 17 и 19 находятся в постоянном зацеплении. Центральное зубчатое колесо 15 связано с гидромотором 20, которое является источником движения, через зубчатые колеса 21, 22, 23 и соединительную муфту 24. Гидромотор 20 жестко связан с основным корпусом 1 СПА. Попарно зубчатые колеса 15 и 21, 22 и 23 находятся в постоянном зацеплении, а колеса 21 и 22 жестко связаны между собой. Каждая из стягивающих обойм 7 и 8 соединена с гидродвигателями соответственно 25 и 26, осуществляющими замыкание - размыкание фланцевых разъемов 5 и 6 своих поясов. Гидродвигатели 25 жестко связаны либо с верхним поясом 2, либо с корпусом 1 СПА. Гидродвигатели 26 жестко связаны с промежуточным поясом 3 и снабжены подвижным элементом 27 для подвода рабочей жидкости.
Устройство содержит гидрораспределители 28, 29 со средним положением 30, 31 соединения трубопроводов со сливом. Позиции 32, 33 распределителя 28 соответственно отвечают режиму “напор” для гидродвигателей 25, 26. Позиции 34, 35 распределителя 29 отвечают режиму “напор” для вращения в противоположные стороны гидромотора 20. Гидролиниями 36, 37, 38 гидрораспределители 28, 29 соединены с источником давления (не показан), а гидролиниями 39, 40, 41 связаны со сливным баком 42. Гидрораспределитель 28 гидролиниями 43, 44, 45 связан с гидродвигателями 25, а гидролиниями 46, 27, 47, 48, 49 связан с гидродвигателями 26. Гидрораспределитель 29 гидролиниями 50, 51 связан с гидромотором 20, который дренажной гидролинией 52 связан с баком 42. В исходном положении гидромотор 20 и гидродвигатели 25, 26 соединены со сливным баком 42 через позиции 31, 30 гидрораспределителей 29, 28 соответственно по гидролиниям 50, 51, 40, 41 и 44, 45, 43, 39, 41 и 48, 49, 47, 27, 46, 39, 41.
Стыковку СПА с аварийным подводным объектом в подводном положении осуществляют следующим образом. В исходном положении камера посадки и присоса СПА установлена в положении “по-походному”, как показано на фиг.1.
СПА перемещается, управляемый с помощью собственного движительно-рулевого комплекса, выходит в зону аварии подводного объекта и заняв возможное или удобное для посадки (в зависимости от подводной обстановки) положение, зависает над комингс-площадкой аварийного объекта (частный случай позиционирования СПА - активного или пассивного процесса управления локальными линейными и угловыми перемещениями СПА в водном пространстве на малых скоростях его поступательных движений).
Возможность стыковки определяется углом максимально допустимого наклона комингс-площадки аварийного подводного объекта (не более 60 градусов относительно горизонтальной плоскости), и учитывается, как правило, уже при проектировании промежуточного и нижнего поясов камеры посадки и присоса СПА путем задания угла скоса одного из стыков фланцевого разъема образующих ее поясов.
СПА удерживают в заданном положении в пространстве без хода. С помощью системы гидравлического управления обеспечивают разъединение разъема 6 фланцев нижнего 4 и промежуточного 3 поясов камеры посадки и присоса, обеспечивая возможность относительного перемещения этих поясов, а затем с помощью поворотного механизма разворачивают нижний пояс 4 камеры посадки и присоса таким образом, чтобы угол наклона опорного фланца 9 стал равным требуемому углу наклона комингс-площадки аварийного подводного объекта относительно горизонтальной плоскости. После этого сопрягают промежуточный 3 и нижний 4 пояса по разъему 6 их фланцев и обеспечивают разъединение разъема 5 фланцев промежуточного 3 и верхнего 2 поясов камеры посадки и присоса, а затем разворачивают промежуточный пояс 3 совместно с нижним поясом 4 так, чтобы опорный фланец 9 занял положение, параллельное комингс-площадке, как показано на фиг.2, и далее сопрягают промежуточный 3 и верхний 2 пояса по разъему 5 их фланцев.
При этом работой механизмов и гидроприводов управляют следующим образом. Для разворота нижнего пояса 4 камеры посадки и присоса гидрораспределитель 28 устанавливают в позицию 33, при этом рабочая жидкость под рабочим давлением по гидролиниям 36, 37, 46, 27, 47, 48, 49 через позицию 33 поступает в гидродвигатели 26, а гидродвигатели 25 по гидролиниям 44, 45, 43, 39 и 41 через позицию 33 соединены со сливным баком 42. Гидродвигатели 26 открывают подпружиненные стягивающие обоймы 8 и размыкают фланцевый разъем 6. При этом подпружиненные стягивающие обоймы 7 остаются закрытыми, а фланцевый разъем 5 - нормально замкнутым. Затем гидрораспределитель 29 устанавливают в соответствующую позицию 35 (или 34) и рабочая жидкость под рабочим давлением по гидролиниям 36, 38, 51 (или 36, 38, 50) через позицию 35 (или 34) поступает в гидромотор 20, а по гидролиниям 50, 40, 41 через позицию 35 (или по гидролиниям 51, 40, 41 через позицию 34) поступает в сливной бак 42. Гидромотор 20 осуществляет вращение в соответствующую сторону и передает крутящий момент через муфту 24 зубчатому колесу 23, через которое вращение передается жестко связанным между собой зубчатым колесам 22 и 21 и далее центральному зубчатому колесу 15, передающему вращение планетарному зубчатому колесу 16. Далее через шарнирную муфту 18 вращение передается планетарному зубчатому колесу 17, которое приводит во вращение солнечное зубчатое колесо 19, установленное под углом к вертикальной оси промежуточной камеры, не меньшим половины максимального угла наклона комингс-площадки подводного объекта, на который предусмотрена посадка. Солнечное зубчатое колесо 19 вследствие жесткой связи с нижним поясом 4 разворачивает его относительно оси 14 на нужный угол, вследствие чего плоскость опорного фланца 9 поворачивается в пространстве на требуемый угол относительно горизонтальной плоскости. Затем гидрораспределитель 29 устанавливают в позицию 31 соединения со сливом гидромотора 20 через гидролинии 50, 51, 40, 41 для остановки разворота нижнего пояса 4.
Для разворота промежуточного пояса 3 совместно с нижним поясом 4 гидрораспределитель 28 устанавливают в позицию 32 и рабочая жидкость под рабочим давлением по гидролиниям 36, 37 43, 44, 45 через позицию 32 поступает в гидродвигатели 25, а гидродвигатели 26 по гидролиниям 48, 49, 47, 27, 46, 39, 41 через позицию 32 соединяются со сливным баком 42. Происходит синхронное срабатывание гидродвигателей 25 и 26. Гидродвигатели 25 открывают подпружиненные стягивающие обоймы 7 и размыкают фланцевый разъем 5. Одновременно с этим подпружиненные стягивающие обоймы 8 закрываются вследствие соединения со сливом гидродвигателей 26, фланцевый разъем 6 нормально замыкается. Затем гидрораспределитель 29 устанавливают в соответствующую позицию 34 (или 35) и рабочая жидкость под рабочим давлением по гидролиниям 36, 38, 50 (или 36, 38, 51) через позицию 34 (или 35) поступает в гидромотор 20, а по гидролиниям 51, 40, 41 через позицию 34 (или по гидролиниям 50, 40, 41 через позицию 35) поступает в сливной бак 42. Гидромотор 20 начинает вращаться в соответствующую сторону, передавая крутящий момент через муфту 24 зубчатому колесу 23, через которое вращение передается жестко связанным между собой зубчатым колесам 22 и 21 и далее центральному зубчатому колесу 15. Поскольку фланцевый разъем 6 нормально замкнут и промежуточный пояс 3 жестко соединен с нижним поясом 4, с которым жестко связано солнечное колесо 19, находящееся в постоянном зацеплении с зубчатым колесом 17, а соединенные между собой через муфту 18 планетарные зубчатые колеса 16, 17 шарнирно связаны с промежуточным поясом 3, то вращение зубчатых колес 16, 17 относительно промежуточного пояса исключается, при этом исключается также и вращение зубчатого колеса 16 относительно центрального зубчатого колеса 15. Центральное зубчатое колесо 15 и планетарное зубчатое колесо 16 находятся в постоянном зацеплении. Таким образом, при вращении центрального зубчатого колеса 15 синхронно с ним разворачиваются в нужное положение относительно оси 13 жестко связанные между собой промежуточный 3 и нижний 4 пояса камеры посадки и присоса, при этом вместе с ними относительно той же оси 13 разворачиваются планетарные зубчатые колеса 16, 17 и муфта 18. Затем гидрораспределитель 29 устанавливают в позицию 31 соединения со сливом гидромотора 20 через гидролинии 50, 51, 40, 41 для остановки разворота связанных между собой промежуточного 3 и нижнего 4 поясов, после чего гидрораспределитель 28 устанавливают в позицию 30 соединения со сливом гидродвигателей 25, 26 для обеспечения нормального замыкания фланцевого разъема 5, и продолжения нормального замыкания фланцевого разъема 6. Опорный фланец 9 камеры посадки и присоса СПА занимает положение параллельно комингс-площадке аварийной ПЛ.
После этого СПА, работая вертикальным движительным комплексом, опускается на комингс-площадку подводного объекта и прижимается к ней опорным фланцем 9. Как только опорный фланец 9 прижмется к комингс-площадке подводного объекта, в камере посадки и присоса резко снижают давление путем сброса из нее воды во внутреннюю цистерну СПА. Происходит “присос” СПА к подводному объекту.
Уплотнительные кольца 10 и 11 обеспечивают герметичность в нормально замкнутых фланцевых разъемах 5, 6, а уплотнительное кольцо 12 - между опорным фланцем 9 камеры посадки и присоса СПА и комингс-площадкой аварийного подводного объекта.
Под действием наружного гидростатического давления СПА через камеру посадки и присоса (неподвижный верхний пояс 2 и подвижные промежуточный 3 и нижний 4 пояса) прижимается к комингс-площадке подводного объекта, обеспечивая жесткость и герметичность контакта, что позволяет после откачки воды из переходной зоны камеры посадки и присоса внутрь емкостей, размещенных в объеме СПА, открыть люк аппарата, люк аварийного подводного объекта и принять или передать людей и грузы.
Отстыковка СПА от подводного объекта и приведение устройства в исходное положение производится в обратном порядке.
Известна простая эпициклическая передача, выполненная в виде дифференциальной передачи, которая включает звенья, совершающие вращение вокруг подвижной оси (сателлит), при наличии одного поводка-водила (С.Н.Кожевников, Я.И.Есипенко, Я.М.Раскин. Элементы механизмов. М.: Оборонгиз, 1956, с.203-206, фиг.707). Движение звеньев такого механизма будет определено, если будет задано вращение каких-либо двух звеньев передачи. В частном случае одно из звеньев можно сделать неподвижным, в результате чего при неподвижном поводке-водиле можно получить простую передачу, а в случае остановки центрального колеса - планетарные передачи. Однако известная конструкция дифференциальной передачи не может быть использована для поворотных механизмов подвижных поясов камеры посадки и присоса СПА из-за невозможности с ее помощью разворачивать каждый из подвижных поясов по отдельности.
Изобретение улучшает эксплуатационные характеристики СПА за счет увеличения полезного объема камеры посадки и присоса без увеличения ее габаритов, упрощения прохода личного состава через эту камеру, улучшения условий проведения спасательных операций в экстремальных ситуациях, а также за счет оперативного обеспечения как полной герметичности разъемов фланцев поворотных поясов камеры посадки и присоса, так и легкости их относительного перемещения. Также увеличивается надежность конструкции как устройства, так и СПА в целом за счет исключения отверстий для прохода поворотных механизмов через “стенки” в поясах камеры посадки и присоса. Кроме того, повышается эффективность спасения экипажей с аварийных ПЛ, увеличивается быстрота проведения стыковки и оказания помощи терпящим бедствие.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВОДНЫЙ АППАРАТ С ПОВОРОТНОЙ КАМЕРОЙ СТЫКОВКИ И ПРИСОСА И УСТРОЙСТВОМ ЦЕНТРИРОВАНИЯ И ПОДТЯГИВАНИЯ | 2011 |
|
RU2468961C1 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО ДЛЯ ПОДВОДНОГО АППАРАТА | 1996 |
|
RU2157776C2 |
| Спасательный подводный аппарат | 2018 |
|
RU2736510C2 |
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ ДЛЯ СПАСЕНИЯ ЭКИПАЖА ПОДВОДНЫХ ЛОДОК, В ТОМ ЧИСЛЕ И ПОДО ЛЬДОМ | 2012 |
|
RU2509027C1 |
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2004 |
|
RU2276647C1 |
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2007 |
|
RU2334650C1 |
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2016 |
|
RU2615029C1 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ ПОДВОДНОГО АППАРАТА ЗА КОМИНГС-ПЛОЩАДКУ ПОДВОДНОГО ОБЪЕКТА | 2011 |
|
RU2509028C2 |
| ПОДВОДНЫЙ АППАРАТ | 2003 |
|
RU2239581C1 |
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2003 |
|
RU2248300C1 |
Изобретение предназначено преимущественно для спасения экипажа аварийных подводных лодок в подводном положении. Устройство включает камеру посадки и присоса, выполненную из сопряженных верхнего, промежуточного и нижнего шаровых поясов. Верхний шаровой пояс укреплен на неподвижном основании (корпусе спасательного подводного аппарата), а промежуточный и нижний пояса выполнены каждый с непараллельными основаниями и с возможностью поворота относительно оси камеры. Механизм поворота установлен снаружи этих поясов и выполнен в виде эпициклической передачи. При позиционировании подводного аппарата над аварийной подводной лодкой разворачивают нижний пояс камеры, устанавливают его опорный (стыковочный) фланец под углом, равным углу наклона комингс-площадки подводной лодки к горизонту, сопрягают нижний пояс с промежуточным поясом и разворачивают их до обеспечения параллельности плоскости опорного фланца и комингс-площадки лодки, после чего сопрягают промежуточный пояс с верхним поясом и присоединяют упомянутую камеру к комингс-площадке с образованием переходной зоны, которую затем осушают. Достигается надежность и быстрота проведения стыковки. 2 н. и 2 з.п. ф-лы. 2 ил.
| СТЫКОВОЧНОЕ УСТРОЙСТВО ДЛЯ ПОДВОДНОГО АППАРАТА | 1996 |
|
RU2157776C2 |
| СПОСОБ СПАСЕНИЯ С АВАРИЙНОЙ ПОДВОДНОЙ ЛОДКИ | 2002 |
|
RU2214344C1 |
| УСТРОЙСТВО ДЛЯ УДЕРЖАНИЯ И ТРАНСПОРТИРОВАНИЯ ВЯЗКОУПРУГОПЛАСТИЧНЫХ И ВЯЗКОПЛАСТИЧНЫХ ПИЩЕВЫХ МАСС | 2004 |
|
RU2264713C1 |
| DE 19718163 А1, 05.11.1998. | |||

