Изобретение относится к подводному судостроению, в частности к спасательным подводным аппаратам (СПА), предназначенным для спасания экипажей аварийных подводных лодок (ПЛ) и других обитаемых и подводных объектов, предназначенных для выполнения подводно-технических работ и стыкующихся под водой с другими подводными объектами, имеющими специальные стыковочные узлы для стыковки с подводными аппаратами.
Известно много зарубежных и отечественных подводных аппаратов, стыкующихся под водой с другими объектами. Наиболее характерными из них являются СПА, предназначенные для спасения экипажей аварийной ПЛ путем стыковки с ее комингс-площадкой, приема спасаемых подводников в СПА и доставки их на надводное спасательное судно или другую ПЛ.
Аналогами могут служить: отечественный СПА по патенту №2082646, зарубежные СПА "Remora" (Австралия), S-SRV (Швеция, Италия), СПА, входящий в единую систему оказания помощи аварийной ПЛ NSRS-HATO Sabmarine Rescue System, в разработке которой участвуют ВМС Великобритании, Франции, Норвегии и Турции, СПА, входящий в глубоководный спасательный де-компрессионный комплекс SRDRS ВМС США («Дайджест» зарубежной прессы, выпуск №3), и другие СПА.
Как показывает опыт эксплуатации отечественных СПА, одной из самых ответственных и сложных операций по спасанию экипажей аварийных ПЛ является операция стыковки СПА со стыковочным узлом (комингс-площадкой аварийно-спасательного люка ПЛ) аварийной ПЛ. Точность стыковки камеры присоса СПА с комингс-площадкой аварийной ПЛ для обеспечения последующей герметизации узла стыковки должна быть довольно высока (±60…70 мм).
Достичь такой точности оператору СПА при ручном управлении движением СПА довольно сложно, что усугубляется наличием подводных течений, кренов и дифферентов аварийной ПЛ, недостаточной прозрачностью воды. Успешность выполнения операции стыковки в большой степени зависит от тренировки личного состава СПА.
Известен патент №2239581 RU на спасательный подводный аппарат с автоматической стыковкой с аварийной подводной лодкой и другими обитаемыми подводными объектами, в котором СПА при наведении его на аварийную ПЛ ориентируется на белый круг, нанесенный на боевой ПЛ в районе аварийной комингс-площадки с помощью стереопары - две телевизионные камеры, установленные снаружи СПА и ориентированные так, чтобы в зоне их видимости находилось стыковочное кольцо стыковочной камеры СПА и белый круг в районе комингс-площадок ПЛ.
Однако при морских испытаниях такого СПА выяснилось, что автоматическая посадка аппарата на комингс-площадку ПЛ не обеспечивает точность посадки, достаточную для герметизации стыковочного узла СПА с ПЛ, которая должна быть в пределах ±60…70 мм от центра комингс-площадки.
Это объясняется искажением телевизионного изображения белого кольца, нанесенного в районе комингс-площадки, при кренах и дифферентах ПЛ, и невозможностью учета этих искажений при обработке вычислительным комплексом СПА из-за отсутствия достоверной информации по фактическим кренам и дифферентам аварийной ПЛ.
Целью предлагаемого изобретения является создание подводного аппарата, обеспечивающего автоматическую стыковку его с подводным объектом с необходимой точностью для герметизации узла стыковки. Для этого СПА при автоматической посадке на ПЛ должен ориентироваться на реперные знаки, нанесенные в районе комингс-площадки ПЛ, жестко координирующие расположение их относительно центра комингс-площадки.
Ниже приводится описание схемы СПА с автоматической стыковкой с ПЛ.
Комингс-площадки ПЛ оборудуются специальными реперными знаками, схема расположения которых заносится в память системы автоматической посадки, которая устанавливается на СПА.
Автоматическая посадка на ПЛ обеспечивается за счет выделения и распознавания реперных знаков на комингс-площадке видеодатчиком, входящим в систему автоматической посадки СПА, обработки полученной информации в электронном вычислительном комплексе системы автоматической посадки, выработки управляющих сигналов и передачей их в систему управления движением.
Автоматическое управление движителями, сближение и посадка на комингс-площадку ПЛ происходит с точностью, необходимой для закрепления СПА на ПЛ.
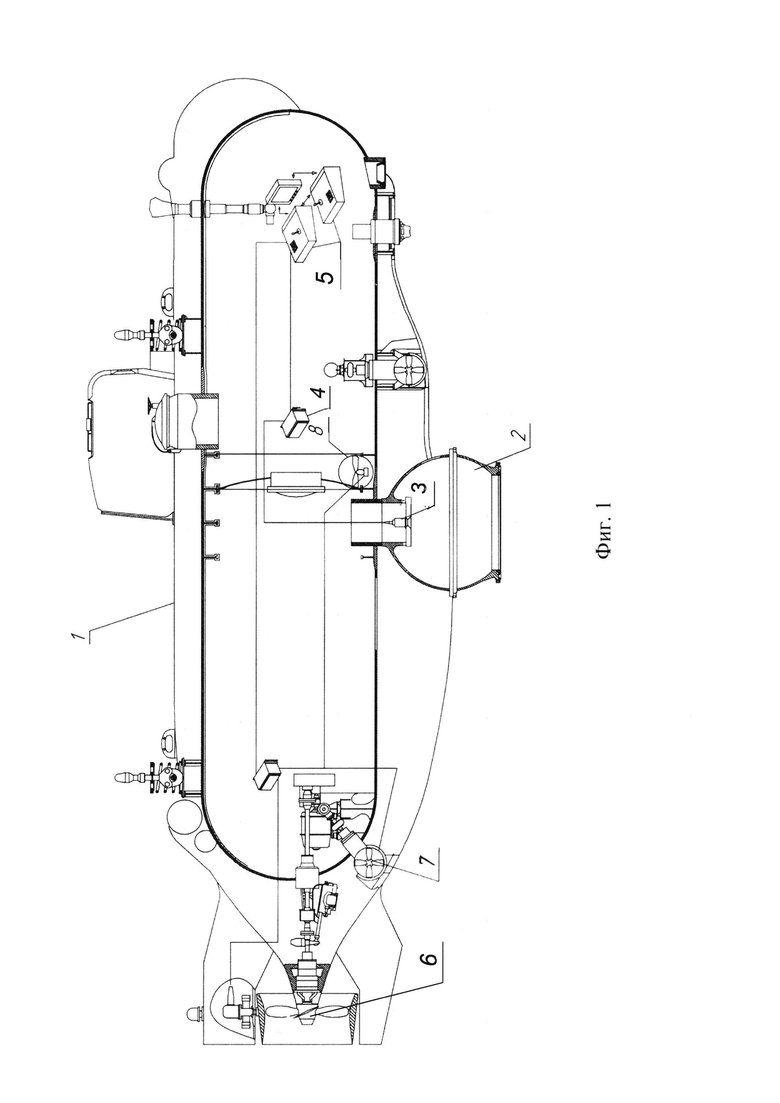
Структурная схема СПА представлена на фиг. 1.
СПА 1 имеет стыковочный узел 2 для стыковки с комингс-площадкой ПЛ, внутри которого имеется иллюминатор, на который установлен видеодатчик 3 системы САП. В посту управления СПА установлен электронный вычислительный комплекс 4 системы САП, а также установлена система управления движением 5 движительно-рулевого комплекса в составе маршевых движителей 6, движителей вертикального 8 и лагового 7 перемещений.
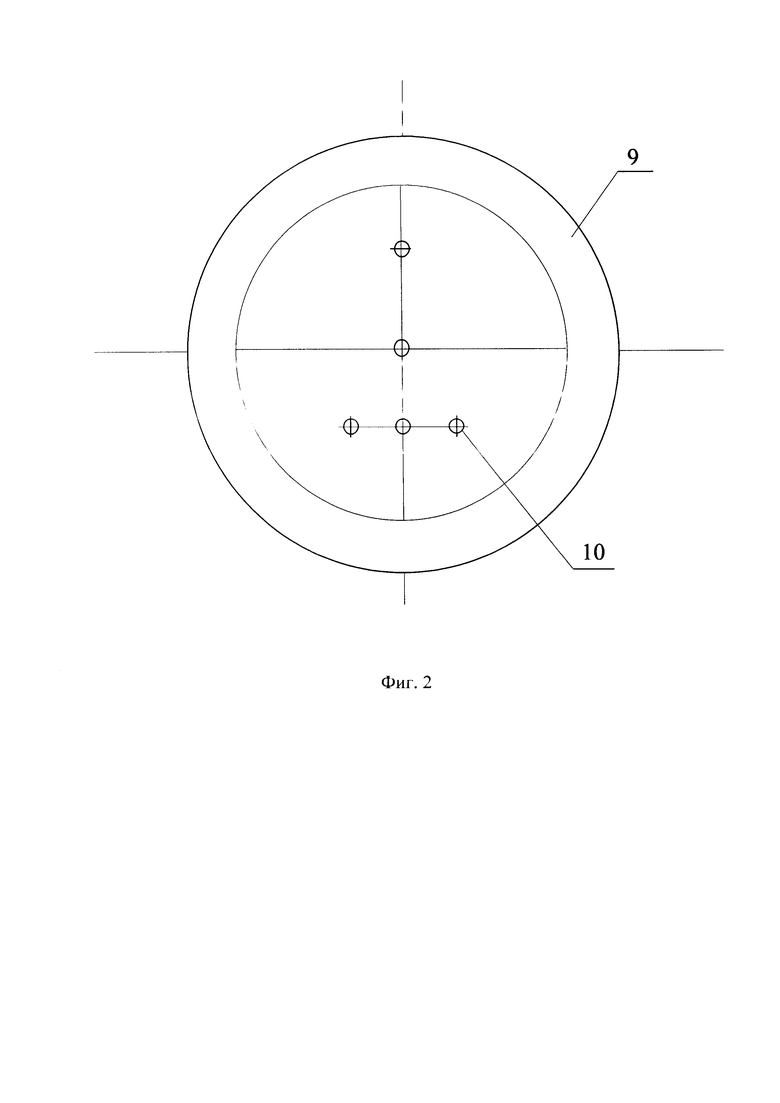
На фиг. 2 показана схема комингс-площадки ПЛ с опорным кольцом комингс-площадки 9, на которую должен производить посадку СПА. На комингс-площадке нанесены реперные знаки 10.
Технология автоматической посадки СПА на ПЛ заключается в следующем:
- производится поиск и обнаружение ПЛ с помощью гидролокационного оборудования СПА. Дальнейшее обследование ПЛ производится визуально через иллюминаторы СПА и при помощи аппаратуры подводного телевидения;
- при обнаружении ПЛ оператор включает аппаратуру САП и после захвата реперных знаков система САП определяет взаимное положение СПА и комингс-площадки, а также параметры их относительного движения. Система САП вырабатывает управляющие сигналы для передачи их на органы управления движительно-рулевого комплекса, которые обеспечивают сближение СПА с комингс-площадкой и его автоматическую посадку с необходимой для стыковки и закрепления СПА на комингс-площадке аварийной ПЛ точностью.
Предлагаемая к патентованию конструкция СПА в других странах отсутствует. В РФ разработан и изготовлен опытный образец системы автоматической посадки САП. Опытный образец СПА прошел все виды испытаний, включая государственные испытания, и принят в состав ВМФ РФ.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВОДНЫЙ АППАРАТ | 2003 |
|
RU2239581C1 |
| Водолазно-спасательный глубоководный аппарат | 2020 |
|
RU2764140C1 |
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2007 |
|
RU2334650C1 |
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2003 |
|
RU2248300C1 |
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2004 |
|
RU2276647C1 |
| УСТРОЙСТВО ДЛЯ СТЫКОВКИ СПАСАТЕЛЬНОГО ПОДВОДНОГО АППАРАТА С ПОДВОДНЫМ ОБЪЕКТОМ И СПОСОБ СТЫКОВКИ С ЕГО ИСПОЛЬЗОВАНИЕМ | 2004 |
|
RU2250858C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ КОМПЛЕКС ДЛЯ ВЫПОЛНЕНИЯ ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2000 |
|
RU2220880C2 |
| Спасательный подводный аппарат со стабилизатором глубины погружения без хода | 2020 |
|
RU2754166C1 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО ДЛЯ ПОДВОДНОГО АППАРАТА | 1996 |
|
RU2157776C2 |
| ПОДВОДНЫЙ АППАРАТ С ПОВОРОТНОЙ КАМЕРОЙ СТЫКОВКИ И ПРИСОСА И УСТРОЙСТВОМ ЦЕНТРИРОВАНИЯ И ПОДТЯГИВАНИЯ | 2011 |
|
RU2468961C1 |
Изобретение относится к области судостроения, в частности к спасательным подводным аппаратам (СПА), предназначенным для спасения экипажей аварийных подводных лодок (ПЛ) и других подводных объектов. СПА имеет стыковочный узел для стыковки его с аварийными ПЛ. В люке аппарата установлен иллюминатор, на котором крепится видеодатчик системы автоматической посадки, который распознает реперные знаки, нанесенные на корпусе аварийной ПЛ, определяет взаимное расположение СПА и комингс-площадки ПЛ, а также параметры их относительного движения и передает управляющие сигналы в систему управления движением аппарата для обеспечения сближения его с комингс-площадкой ПЛ и последующей автоматической посадки на нее. Технический результат заключается в повышении надежности узла стыковки СПА с ПЛ за счет повышения точности посадки СПА на комингс-площадку ПЛ и, соответственно, обеспечения достаточной герметизации стыковочного узла. 2 ил.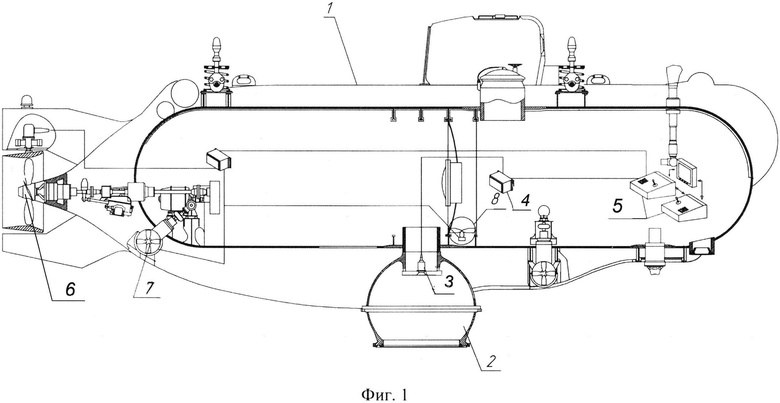
Спасательный подводный аппарат, имеющий движительно-рулевой комплекс, систему управления движением, аппаратуру подводного телевидения, стыковочный узел для стыковки с другим подводным объектом, отличающийся тем, что на аппарате установлена система автоматической посадки, включающая в себя видеодатчик, установленный на иллюминаторе крышки люка стыковочной камеры, подключенный к электронному вычислительному комплексу, обрабатывающему полученную информацию о расположении комингс-площадки аварийной подводной лодки относительно спасательного подводного аппарата и передающего управляющие сигналы в систему автоматического управления движением управляющих сигналов для движительно-рулевого комплекса на сближение и посадку спасательного подводного аппарата на комингс-площадку подводной лодки.
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2003 |
|
RU2248300C1 |
| ПОДВОДНЫЙ АППАРАТ | 2003 |
|
RU2239581C1 |
| Трехходовой кран | 1927 |
|
SU8154A1 |
| CN 101234665 A, 06.08.2008. | |||

