Техническое решение относится к области испытаний машин и механизмов и может быть использовано для определения моментов инерции как тел вращения, так и других.
Известны способы определения моментов инерции тел методом их колебаний в системе с упругими связями.
Известен, в частности, способ определения момента инерции тела на качающейся платформе, один край которой снабжен осью качания, а другой - опирается на пружины сжатия [1], с. 177-178. Способ заключается в том, что тело закрепляют на этой платформе так, чтобы его ось, относительно которой определяют момент инерции, была параллельна оси качания платформы, и приведя систему в режим свободных упругих колебаний, измеряют их период, после чего по известным жесткости пружин, периоду колебаний, а также моменту инерции платформы и расстоянию между осями тела и платформы определяют момент инерции исследуемого тела.
Известен также способ определения момента инерции тела посредством его подвешивания на нижнем конце вертикального упругого стержня так, чтобы ось тела совпадала с осью стержня [1], с. 67-69. Способ реализуется путем закрутки стержня вокруг его оси на первоначальный угол, после чего систему освобождают и она переходит в режим свободных упругих колебаний, период которых измеряют, и затем по известным жесткости стержня и периоду колебаний определяют момент инерции исследуемого тела.
Все три вышеописанных способа имеют существенным недостатком необходимость демонтировать исследуемые тела с их опор, на которых они функционируют в машинах или механизмах.
Наконец, известен способ определения момента инерции тела без его демонтажа с опор посредством крутильных колебаний в системе с упругим горизонтальным торсионом, который одним концом через переходную муфту присоединяют к торцу исследуемого тела (колесу автомобиля), а другим - к заделке, связанной с опорой [2]. Указанный способ принят в качестве прототипа.
Применение этого способа связано с неудобством располагать значительным рабочим пространством для размещения горизонтального торсиона и со сложностью устройства заделки торсиона, положение которого должно регулироваться в широких пределах по горизонтали и вертикали, в зависимости от размеров исследуемых тел. Главным недостатком способа является невозможность его применения к телам, у которых отсутствует доступ для торцевого присоединения торсиона, например в случае беговых барабанов стендов для испытания автомобилей и автомобильных шин.
Решаемой задачей является упрощение определения моментов инерции тел методом их колебаний в системе с упругими связями за счет облегчения подготовительных операций, требующих изготовления переходных деталей и трудоемких приспособлений, а также расширение сферы применения метода за счет появления возможности применять его к труднодоступным телам вращения (в том числе, к тяжелым барабанам, маховикам, роторам и др.) в системах машин, стендов и механизмов, без необходимости полной или частичной их разборки.
Для решения указанной задачи определения момента инерции тела методом его колебаний в системе с упругими связями тело охватывают по одной из его поверхностей гибкой нерастяжимой лентой, закрепляют ее на теле от проскальзывания и соединяют по меньшей мере с одним упругим элементом и по меньшей мере с одной массой, при этом согласуют усилие предварительного натяжения ленты и амплитуду колебаний из условия поддержания в ней растягивающих напряжений в любой фазе колебаний.
Упругие элементы могут быть присоединены к обоим концам ленты, при этом в качестве единственной массы колебательной системы может быть использована масса исследуемого тела.
На фиг. 1 показана схема, в соответствии с которой лента, охватывающая исследуемое тело, соединена с упругим элементом пружиной растяжения и с массой.
На фиг. 2 - то же, с иным расположением пружины.
На фиг. 3 показан вариант, при котором в качестве единственной массы системы используют массу исследуемого тела.
На фиг. 4 - то же, с иным расположением упругих элементов.
Способ определения момента инерции тела осуществляется следующим образом. Тело 1 (фиг. 1) охватывают по одной из его поверхностей гибкой нерастяжимой лентой 2 и закрепляют ее на теле от проскальзывания штифтом 3. Один конец ленты соединяют с упругим элементом 4, а к другому подвешивают дополнительную массу 5, создавая предварительное растяжение упругого элемента 4 и соответствующее натяжение ленты, достаточное для осуществления колебаний системы, амплитуду которых выбирают так, чтобы в любой фазе колебаний лента была нагружена растягивающими усилиями. Это достигается тем, что для создания первоначального импульса колебаний тело поворачивают в сторону упругого элемента, позволяя последнему сжаться до некоторой длины, при которой в соединенном с ним участке ленты еще будут поддерживаться растягивающие усилия. По завершении первоначального отклонения системы от равновесного состояния ей дают свободу колебаний, которые ввиду относительной малости рассеивания энергии трения в подшипниках оси тела и аэродинамических сопротивлений системы, а также малого внутреннего гистерезиса в упругом элементе приобретают характер изохронных. В процессе упругих колебаний системы подсчитывают их период, например, с помощью неподвижного фотоэлектрического датчика и рефлектора, закрепленного на теле или ленте. Затем, определив любым из известных способов жесткость упругого элемента, подсчитывают момент инерции J тела по формуле:
где c - жесткость пружины,
T - период колебаний,
G - вес присоединенной массы, равный сумме весов дополнительной массы и приведенного веса части пружины, принимающей участие в колебаниях,
R - радиус тела в местах схода ленты,
g - ускорение силы тяжести.
Благодаря применению гибкой ленты 2 взаимное расположение дополнительной массы 5 и упругого элемента 4 можно изменять применительно к конфигурации свободного пространства вокруг исследуемого тела 1, как это показано в качестве примера на фиг. 2. Решение той же задачи упрощается, особенно для крупногабаритных и тяжелых тел (например, для беговых барабанов испытательных стендов диаметром свыше 1,5 м и весом более 1 т) посредством того, что в качестве единственной массы колебательной системы используют массу исследуемого тела, а для предварительного натяжения ленты и поддержания в ней во время колебаний растягивающих напряжений к ленте присоединяют второй упругий элемент, как это показано на фиг. 3. В этом случае при больших потребных усилиях предварительное натяжение ленты может быть облегчено применением натяжного устройства любой известной конструкции, например винтового механизма 6 (см. фиг. 3).
В этом варианте способа так же, как и в предыдущем, взаимное расположение элементов колебательной схемы удобно изменять применительно к конфигурации свободного пространства вокруг исследуемого тела, например, так, как это показано на фиг. 4. В остальном способ реализуется подобно описанному выше и проиллюстрированному фигурами 1 и 3.
Способ может быть применен в различных отраслях машино- и приборостроения во всех случаях, когда для изучения динамики при работе и испытаниях машин, механизмов и двигателей необходимо располагать моментами инерции их деталей. В первую очередь, способ может быть использован в тех случаях, когда демонтаж тяжелых и крупногабаритных тел (маховых масс, барабанов и др.) невозможен, а доступ к ним осложнен малым свободным пространством.
Таким образом, предлагаемый способ позволяет существенно расширить возможности определения моментов инерции как тел вращения - тяжелых маховиков, колес, роторов, так и других тел без их демонтажа и взвешивания.
Источники информации
1. М. М.Гернет, В.Ф.Ратобыльский. Определение моментов инерции. М.: Машиностроение, 1969.
2. H. Walson, T.Buckley, H.Marks. Test Procedures for the Evaluation of Aerodynamic Drag on Full-Scale Vehicles in Windy Environments. SAE 760106, 1976, page 378.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СОПРОТИВЛЕНИЙ КАЧЕНИЮ КОЛЕСА С ЭЛАСТИЧНОЙ ШИНОЙ НА БАРАБАННОМ СТЕНДЕ МЕТОДОМ ВЫБЕГА | 1999 |
|
RU2158910C1 |
| Способ измерения деформаций растяжение-сжатие | 2020 |
|
RU2753747C1 |
| Исполнительный механизм имитатора пониженной гравитации транспортных средств | 1978 |
|
SU981842A1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2014 |
|
RU2568963C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ ТЕЛА | 2014 |
|
RU2575184C1 |
| СПОСОБ ИЗМЕРЕНИЯ МЕХАНИЧЕСКИХ СВОЙСТВ ПОЛИМЕРОВ В ПРОЦЕССЕ ОТВЕРЖДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2307337C2 |
| СПОСОБ ИЗМЕРЕНИЯ МОМЕНТА ИНЕРЦИИ | 2013 |
|
RU2539812C1 |
| Способ определения центрального момента инерции и координат центра масс в заданной плоскости и массы тела | 1982 |
|
SU1046633A1 |
| СПОСОБ ОБКАТКИ ГУСЕНИЧНЫХ ЛЕНТ НА СТЕНДЕ (ВАРИАНТЫ) | 2010 |
|
RU2423681C1 |
| Способ определения поверхностного натяжения твердых тел | 1980 |
|
SU966561A1 |
Способ предназначен для определения моментов инерции как тел вращения, так и других тел методом их колебаний в системе с упругими связями. Исследуемое тело охватывают по одной из его поверхностей гибкой нерастяжимой лентой, закрепляют ее на теле от проскальзывания и соединяют с одним упругим элементом и с массой или с другим упругим элементом, создают усилие предварительного натяжения ленты, согласовывая амплитуду колебаний с величиной этого усилия из условия поддержания растягивающих напряжений в ленте в любой фазе колебаний. Способ позволяет существенно расширить возможности определения моментов инерции, в первую очередь труднодоступных, тяжелых и крупногабаритных маховиков, колес, роторов, исключая необходимость их демонтажа и взвешивания. 4 ил.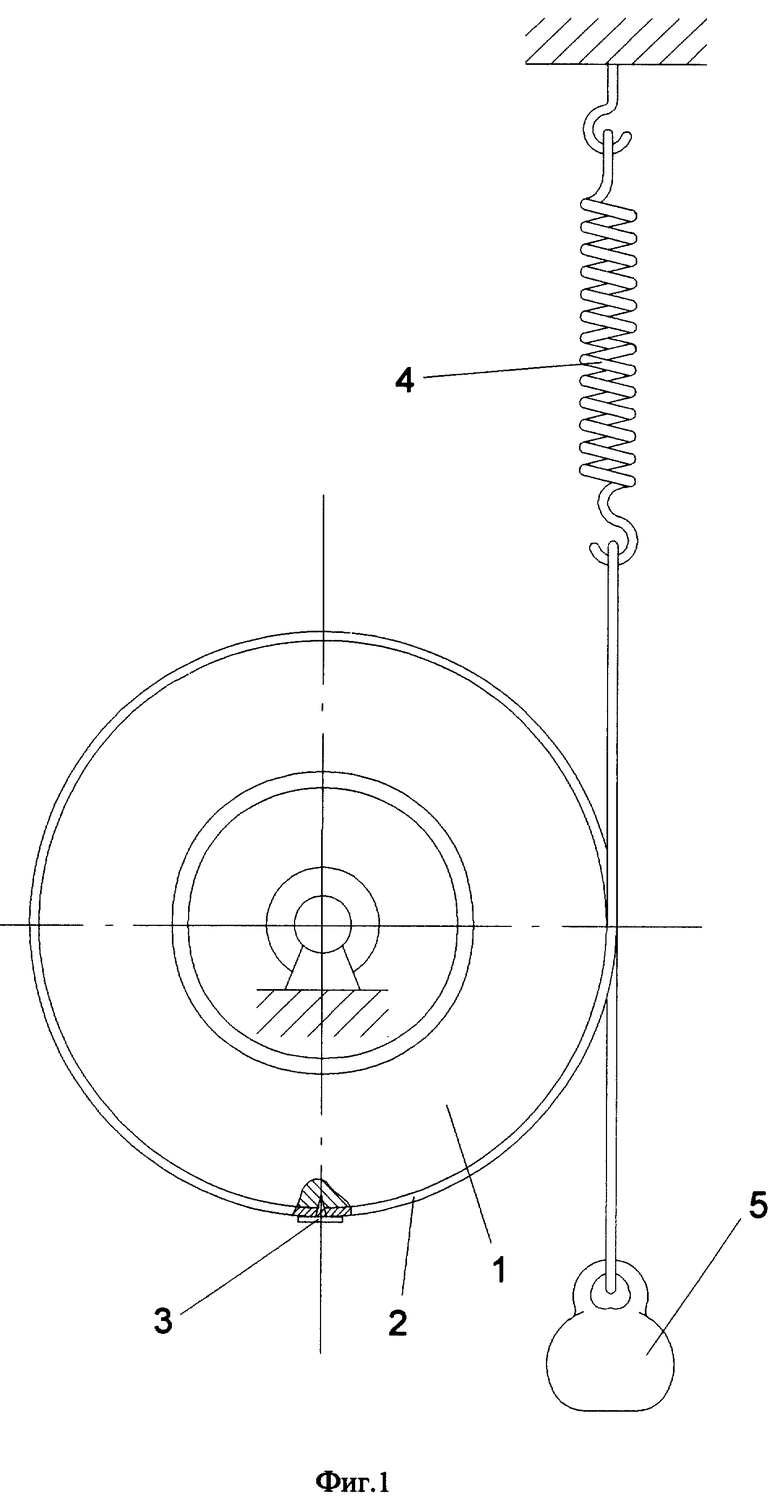
Способ определения момента инерции тела методом его колебаний в системе с упругими связями, отличающийся тем, что тело охватывают по одной из его поверхностей гибкой нерастяжимой лентой, закрепляют ее на теле от проскальзывания и соединяют один конец ленты с упругим элементом, а другой конец ленты - со вторым упругим элементом или с массой, при этом создают усилие предварительного натяжения ленты, после чего согласуют с его величиной амплитуду колебаний из условия поддержания растягивающих напряжений в ленте в любой фазе колебаний.
| Способ определения моментовиНЕРции издЕлий | 1979 |
|
SU807088A1 |
| АППАРАТ МЕМБРАННОЙ ЭКСТРАКЦИИ ДЛЯ ДЕТОКСИКАЦИИ БИОЛОГИЧЕСКИХ ЖИДКОСТЕЙ | 1993 |
|
RU2061532C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ИНЕРЦИИ | 1992 |
|
RU2069331C1 |
| DE 2945819 A1, 21.05.1981 | |||
| US 5018382, 28.05.1991. | |||

