I
Изобретение огноси.тся к измерительно технике и может быть использовано в балансирово шой технике для определения инерции различных изделий.
Известен способ определения моментов изделий, заключающийся в том, что изделие закрепляют на упругой колебательной системе, которая выполнена в виде роликов с установленной на них поц1фужчненной платформой для крепления изделия. Сообщают системе колебания и по периоду колебаний судят о моменте инерции из дели и 1 j.
Недостаток способа - невысокая точность измерений из-за наличия трения в роликах.
Наиболее близким по технической сущности к изобретению является способ определения моментов инерции изделий, заключающийся в том,что изделие закрепляют на колебательной системе, которая выгюлнена в виде подпружиненной платформы и по периоду колебаний в зависимости от упругости системы судят о моменте инерции изделия (2). При сообщении колебаний платформы с изделием платформа совершает вращение вокруг неподвижной оси, при этом рекоменцуется жесткость пружины подбирать так, что период колебания больше или равен 1 с, что возможно, при малой жесткости пружин. Однако при этом колебания возрастают и их уже нельзя считать малыми 2.
Недостатком способа является невысокая точность измерений из-за .наличия трения скольжения в оси вращения платформы и из-за необходимости подбора жесткости пружины.
Цель изобретения - повышение точнос5ти.
Поставленная цель достигается тем, что Колебательной системе сообщают плоскопараллельное движeниe а момент инерции определяют по формуле
/СТ С
-3,
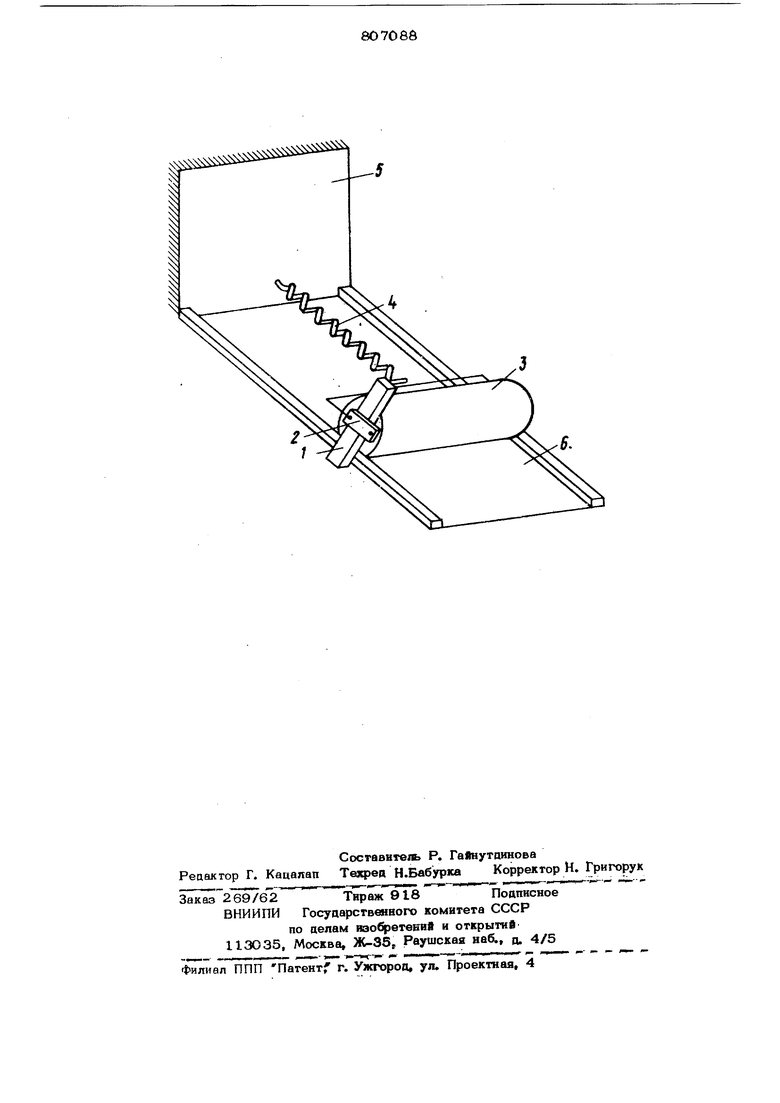
g / С. где J -момент инерции изделия; 38 R -рясстояние от центра масс колебательной системы цо точки крепления изпелия; Т-период колебаний; с -ко ффициент упругости, О -ускорение .свободного падения; q - вес колебательной системы с изцелием;О-.- момент инерции колебательной системы с изаелием. На чертеже изображено устройство для реализации способа определения момента ннерции изаелия. Изделие I с помощью хомута 2 закрепляют на ципинорическом катке 3, который шарнкрко соеаинен с пружиной 4, другой конец котчэрой закреплен в основа нии 5. Каток 3 вместе с изделием 1 перемешается по горизонтальной плоскости 6. Каток 3 с пруж1эдой 4 образуют упру.гую колебательную систему. Способ осуществляется следующим обpaaoMt, Колебательной системе сообщают плос ко пар аплельное движение, т.е. предвари тельно подпружиненный каток 3 с закреп ленным на нем изделием 1 отклоняют на некоторое расстояние X от положения равновесия я отпускают его. Под действи ем гфужины saTOK совершает колебательное овижение относительно положения рав новесия, В процессе движения катка 3 с иэ|1в)Шем i измеряют время некоторог числа И колебаний и определяют период Т: колебаний по формуле -1 В пфоцесое колебаний изделие 1 совместно с катком 3 совершает данженгЛ, описываемое дифференцввпьным ураввенне Лагранжа Ж TJ Л IK Мat л ах / эх ЭА к - кинетическая энергия твердого тела; П - потенциальная энергия твердого тела; X - скорость перемешения тела. k- fQ -Т(ё ). ,. :е где Q - вес колебательной системы с изделием; ускорение свобоаного падения, 3L - момент инерции колебательной системы с изаелием; 8 рпссг)яние от центра Meicc колебатеш ной системы до точки крепления изделия, т.е. радиус катка 3, где с - коэффициент упругости пружины ч. Подставляя значение К и П в уравнение Лагранжа и решая его стносительно О , находим ,2П / откуда момент инерции J изделия определяется следукнцим выражением o-R4-5l -- Va 2Пг Q / И где Ос - момент инерции колебательной системы без изделия. Способ позволяет с высокой .то шостью определить момент инерции изделия за счет наличия катка в колебательной системе и за счет отсутствия необходимости в подборе жесткости пружины. Ф ормула изобретения Способ определения моментов инерции изделий, заключающийся в том, что изделие закрепляют на упругой колебательной системе и по периоду колебаний в зависимости от упругости системы судят о моменте инерции изделия, о т л и ч а ю«г щ и и с я тем, что, с целью повышения точности, колебательной системе сообщают Плоскопараллельное движение, а момент инерции определяют по формуле . . . о - момент инерции изделия, R - расстояние от центра масс колебательной системы до точки крепления изделия; Т - период колебаний, р - ускорение свободного падения, q г- вес колебательной системы с изделием, С - коэффициент упругости, 3 - момент инерции колебательной системы с изделием. Источники информации, принятые во внимание при экспертизе 1.Диментберг Ф. М. Колебания машин. М., Машиностроение, 1964, с, 16. 2.Чернет М. М. и Ратобыльский В. Ф. Определение моментов инерции. М., Машиностроение, 1969, с. 177 (прототип).
.iSSiiSS i 
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения моментов инерции изделий | 1980 |
|
SU1010475A2 |
| Способ определения момента инерции изделий | 1980 |
|
SU877377A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ И СТЕНД ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2596032C2 |
| СПОСОБ ИЗМЕРЕНИЯ МОМЕНТА ИНЕРЦИИ | 2013 |
|
RU2539812C1 |
| Способ защиты от вибрации и устройство для его осуществления | 2017 |
|
RU2669914C2 |
| Устройство для доводки плоских поверхностей деталей | 1982 |
|
SU1371885A1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ СТАТО - ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ФИЗИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2562445C2 |
| РЕЗОНАНСНЫЙ СПОСОБ ИЗМЕРЕНИЯ МОМЕНТОВ ИНЕРЦИИ ИЗДЕЛИЙ ТИПА ТЕЛ ВРАЩЕНИЯ | 1991 |
|
RU2077036C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ИНЕРЦИИ ТЕЛА | 1999 |
|
RU2158906C1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ МАССЫ В НЕВЕСОМОСТИ | 2012 |
|
RU2488784C1 |