Изобретенщв относится.к испытательным стендам в частности к стеидам для наземных испытаний транспортных средств, предназначенных для работы в условиях поннженной гравитации.
Известен исполнительный механизм имитатора пониженной гравитации, содержащий шарнирный двухзвенник и упругие элементы, соединенные с одним звеном двухзвенника непосредственно, а с другим посредством кинематической передачи, выполненной в виде шар- нйрно-рычс1жного параллелограмма 13.
Недостатком этого исполнительного механизма является непосредственное соединение упругого элемента со звеном и наличие шарнирно-рычажного параллелограмма, что ограничивает зону слежения за перемещением испытуемого объекта и снижает точность моделирования.
Наиболее близким к предпагаем(м«у по технической сгущности и достигаемому результату является исполнительный механизм имитатора пониженной гравитации транспортных средств, содержащий шарнирно установленный на .поворотном корпусе шарнирный двухзвенник, coёдинeнныJft свободным концом первого эвена с испытуенсям транспортным средством, а каждое из звеньев кинематически связано с соответствукщимс кривошипами, соединенными с поворотным корпусам посредством упругих элементов С 2}.
Для обеспечения возможности применения такого устройства при испытании объектов с различными весовыми характеристиками обычно используются сменные винтовые цилиндрические пружины или сменные пакеты йружин, что оказывается целесообразным лишь при весах объектов, до 100 кГ, так как дошьнейшее увеличение нагрузки на
15 устройство приводит к значительному увеличению габаритов и веса пружинных узлов, а следовательно к услож.нению конструкции силового элемента. Таким образом, причина ограничения
20 универсализации устройства по весоЬым характеристикам исследуемых объек- тов заключается в недостаточной энергоемкости винтовых цилиндрических пружин.
25
Цель азобретения - раоиирение диапазона регшизуемьиг: весовых нагрузок путем пбдьаУения энергоемкости упругих элементов.. .
Поставленная цель, достигается тем,
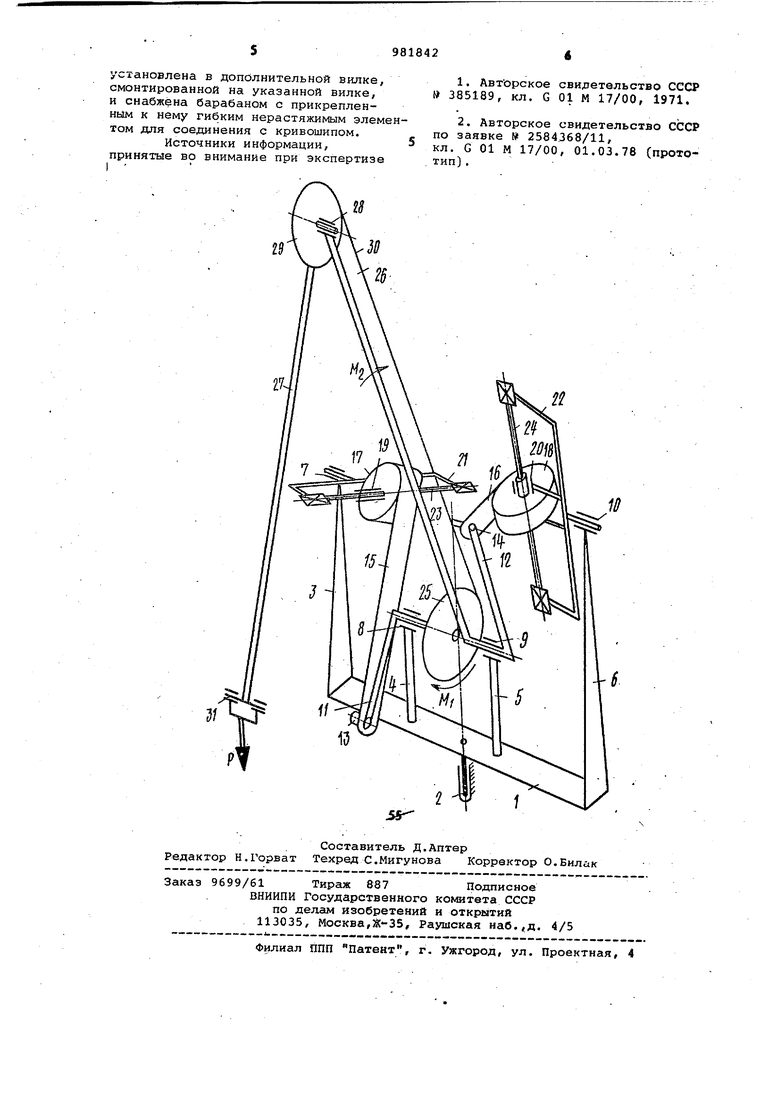
30 что в иcпoJft итeльнoм механизме имитатора пониженной гравитации, содер жащем шарнирно установленный на поворотном корпусе шарнирный двухэвенник, соединяемый свободным конц первого звена с испытуемым транспор ным средством, а каждое из звеньев кинематич ески связано с соответствую щими кривошипами, соединенными с поворотным корпусом посредством упругих элементов, каждый упругий элемент выполнен в виде торсиона,концы которого жестко прикреплены к KOHцам вилки, которая -установлена в го ризонтайьном подшипнике указанйого корпуса, а средняя часть торсиона шарнирно установлена в дополнительной вилке, смонтированной на указанной вилке, и снабжена барабаном с прикрепленным к нему гибким нерас жимым элементом для соединения с кривошипом. jia чертеже изображена кинематическая схема устройства в аксонометрии.Исполнительный механизм содержит поворотную платформу 1, установленную на передвижном механизме ( не по казан } на шарнире 2, допускающем вр щение поворотной платформы относительно вертикальной оси. На поворотной платформе жестко-закреплены стойки3-6, заканчивающиеся Шарнирами 7-10, оси которых горизонтальны и расположены в одной вертикальной плоскости, причем шарниры 8 и 9 соосны. Вшарнирах 8 и 9 установлены кривошипы 11 и 12, длина которых равна расстоянию между осями шарниров 7,8 и 9,10 соответственно, с пальцами 13 и 14, входящими в от-верстие гибких нерастяжимых элементов (например, лент 15 и 16; други ми концами закрепленных на барабанах 17 и 18, установленных в шарни pax 19 и 20 в вилках 21 и 22. Торсионы 23 и 24 закреплены одними концами в вилках 21 и 22, а середи нами в барабанах 17 и 18, причем так, что верхнее положение кривошипов 11 и 12 в плоскости шарниров 7-10 соответствует недеформируемому состоянию торсионов. Кривошип 11 жестко связан с блоком 25, э. кривошип 12 - со звеном 26. Шарнирный двухзвенник состоит из двух звеньев 26,27 и шарнира 28, соединяющего их. Соосно шарниру 28- на звене 27 жестко закреплен блок 29, связанный с блоком 25 гибким нерастяжимым элементом 30, Другой коуец звена 27 соединяется с центром масс исследуе мого объекта посредством шарнирного подвеса 31. Преодоление исследуемым объек-том неровностей при движён1 И его масс в плоскост в которой звенья 26 и -54 приводит к OTHofe5we«4 cn«s- мйЬемещэнию этих зве нье.в, а следовательно, к повороту кривошипов 11 и 12, вызывая сматывание ( наматывание ) лент 15 и 16 с барабанов 17 и 18, которое в свою очередь, приводит к соответствуютему закручиванию торсионов 2..24. При условии, что ленты имеют достаточную ширину, барабаны, а следовательно и вилки, на которых установлены они, занимают положения, определяемые направлениями лент, т.е. оси вращения барабанов будут всегда перпендикулярны осям сходящих с них лент. В результате усилия от закручивания торсионов 2.3, 24 и плечих действия на кривошипы 11 -и 12 всегда находятся в таком соответствии, что моменты М и возникающие на кривошипах и передаваемые далее на звено 26 непосредственно, а на звено 27 через блок 25, гибкий нерастяжимый элемент 30 и блок 29, создают в подвесе 31 вертикальное, независящее от положения центра масс объекта., в пределах зоны слежения, усилие, частично или полностью компенсирующее силу тяхсести Р исследуемого объекта. При выходе центра масс объекта из плоскости звеньев 25 и 27 происходит поворот платформы 1 относительно вертикальной оси в шарнире 2. Перестройка устройства на различные весовые характеристики исследуемых объектов осуществляется путем установки торсионов различной жесткости. Применение предлагаемого изобретения позволяет упростить исполнительный механизм имитаторов пониженной гравитации и расширить примерно в два раза диапазон весовых нагрузок. Формула изобретения Исполнительный механизм имитатора пониженной гравитации транспортных средств, содержащий шарнирно установленный на поворотном корпусе шарнирный двухзвенник, .соединяемый свободным концом первого эвена с испытуемым транспортным средством, а каждое из звеньев кинематически связано с соответствующими кривошипами, соединенными с поворотным, корпусом посредством упругих эле- . ментов, отличающийся . тем, что, с целью расширения диапазона реализуемых ве.совых нагрузок путем повышения энергоемкости упругих элементбв, кгшдый упругий элемент выполнен в виде торсиона, концы которого жестко прикреплены к концам вилки, которая установлена, в горизонтальном подшипнике указанного корпуса, 3-Средняя часть торсиона шарнирно
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный механизм имитатора пониженной гравитации | 1978 |
|
SU765686A1 |
| Силовой элемент имитатора пониженной гравитации | 1986 |
|
SU1439444A1 |
| Исполнительный механизм имитатора пониженной гравитации | 1989 |
|
SU1722946A1 |
| Устройство для производства монтажных работ | 1988 |
|
SU1615155A1 |
| УСТРОЙСТВО ДЛЯ ХОДОВЫХ ИСПЫТАНИЙ ВЕЗДЕХОДА, РАБОТАЮЩЕГО В УСЛОВИЯХ ПОНИЖЕННОЙ ГРАВИТАЦИИ | 1973 |
|
SU385189A1 |
| Разгружающее устройство имитатора пониженной гравитации | 1990 |
|
SU1759731A1 |
| Имитатор пониженной гравитации для испытания транспортных средств | 1980 |
|
SU928182A1 |
| Напольный малогабаритный стенд для исследования подвесок автомобилей | 2016 |
|
RU2629636C1 |
| МОБИЛЬНОЕ, ПРЕИМУЩЕСТВЕННО ОПТИЧЕСКОЕ, УСТРОЙСТВО | 1998 |
|
RU2145136C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ИНЕРЦИИ ТЕЛА | 1999 |
|
RU2158906C1 |
