Изобретение относится к области земляных работ и касается, в частности, системы и способа сбора геологических данных и данных о местоположении, а также управления экскаватором в соответствии с собранными данными.
Обзор известных технических решений
Различные типы экскаваторов были разработаны для производства земляных работ на заданном участке или трассе в соответствии со специфическим способом их выполнения. Один тип экскаватора, часто называемый гусеничным траншеекопателем, обычно используется при выкапывании длинных непрерывных траншей с целью прокладки и последующего закапывания трубопроводов различных типов. Производителю земляных работ или подрядчику иногда необходимо выкопать несколько миль или даже сотен миль траншеи на местности, имеющей различные типы неизвестной подповерхностной геологии.
Как правило, такой подрядчик выполняет ограниченное обследование заданного места земляных работ, чтобы оценить природу местности, а также размер или длину участка, на котором необходимо произвести выемку грунта. Может быть проанализирован один или несколько образцов кернов вдоль определенной трассы земляных работ, чтобы лучше оценить тип грунта, который необходимо выкопать. На основании качественной и количественной информации различного вида подрядчик обычно составляет финансовую смету, которая заранее определяет финансовые ресурсы, необходимые, чтобы выполнить земляные работы. При предложении цены на контракт земляных работ такой подрядчик часто представляет фиксированное финансовое предложение.
Понятно, что недостаточная, неточная или вводящая в заблуждение информация об обследовании может значительно повлиять на точность сметы или предлагаемую цену, связанную с отдельным проектом земляных работ. Например, первоначальное обследование может показать, что подповерхностная геология для всей или большей части заданной трассы земляных работ состоит из песка или рыхлого гравия. Соответственно, смета подрядчика и предлагаемая стоимость отразят затраты, связанные с выемкой относительно мягкого подповерхностного грунта. Однако вместо этого во время земляных работ может быть определено, что существенная часть заданной трассы земляных работ состоит из относительно твердого грунта, например гранита. Дополнительные затраты, связанные с выкапыванием необнаруженного твердого грунта, обычно относятся на счет подрядчика. Известно, что в отрасли промышленности, связанной с выполнением земляных работ, непредвиденные затраты могут поставить под угрозу финансовую жизнеспособность подрядчика.
Были разработаны различные методы для анализа подповерхностной геологии с целью установления типа, природы и структурных признаков подстилающего грунта. Радиолокационное зондирование грунта и инфракрасная термография являются примерами двух популярных методов обнаружения отклонений в подповерхностной геологии. Однако эти и другие неразрушающие методы анализа страдают от множества недостатков, которые в настоящее время ограничивают их полезность при выкапывании длинных непрерывных траншей или при выемке грунта на относительно больших участках. Кроме того, традиционные инструменты подповерхностного анализа обычно обеспечивают только отображение геологии определенной подповерхностной области и не предоставляют информацию относительно структурных или механических свойств подстилающей поверхности, являющихся критичными при попытках определить характеристики грунта, который предстоит выкопать.
В книге Вуль В.Я. и др. "Наладка электроприводов экскаваторов", под ред. Ключева В. И. - М.: Недра, 1969, описана система сбора данных и управления для машины, имеющей землеройный орган и содержащей средства приведения в движения для движения машины вдоль заданной трассы. Однако известная система не обеспечивает достаточной производительности работы экскаватора, поскольку не позволяет получить точные характеристики подповерхностной геологии на участке земляных работ.
У производителей работ и подрядчиков, использующих машины для земляных работ, имеется потребность минимизировать трудности определения характеристик подповерхностной геологии на заданных участках земляных работ. Существует также дополнительная потребность увеличить производительность работы экскаватора с помощью получения точных характеристик такой подповерхностной геологии. Настоящее изобретение направлено на удовлетворение этих и других потребностей.
Сущность изобретения
Настоящее изобретение предлагает систему и способ сбора данных и управления для получения характеристик подповерхностной геологии на участке земляных работ, а также и для использования собранных данных при оптимизации эффективности работы экскаватора. Система формирования геологических изображений и система определения географического местоположения используются для первоначальной разведки заданного участка или трассы земляных работ. Блок получения геологических характеристик может использоваться также для улучшения данных, отображающих геологию. Собранные данные обрабатываются с целью получения для участка земляных работ подробных геологических данных и данных о местоположении. Полученные данные используются главной системой управления для оптимизации работы экскаватора. В одной из форм осуществления изобретения при анализе неизвестной подповерхностной геологии главный блок управления обращается к базе данных геологического фильтра, которая включает данные геологических профилей для многочисленных типов геологии. Удаление данных геологического фильтра, соответствующих известной геологии, из собранных данных, отображающих геологию, обеспечивает немедленное распознавание неизвестных и подозрительных подземных объектов. В предпочтительном случае система формирования геологических изображений содержит радиолокационную систему зондирования грунта, имеющую множество антенн, ориентированных ортогонально, чтобы получать трехмерные изображения подповерхностной геологии. Программное обеспечение для определения корреляции используется для того, чтобы коррелировать собранные данные, отображающие геологию, с предшествующими данными о производительности экскаватора для определения механических характеристик структуры подповерхностной геологии. Точное нанесение на географическую карту участка земляных работ обеспечивается системой определения географического местоположения, которая в предпочтительном случае содержит передвижной транспондер, установленный на экскаваторе, и множество наземных транспондеров. В одной из форм осуществления изобретения сигналы, передаваемые одним или несколькими спутниками глобальной радионавигационной системы (GPS), используются вместе с опорными сигналами, создаваемыми множеством наземных транспондеров.
Краткое описание чертежей
На фиг. 1 показан вид сбоку одной из форм конструктивного исполнения экскаватора, называемого гусеничным траншеекопателем и имеющего многоковшовое приспособление для рытья траншей.
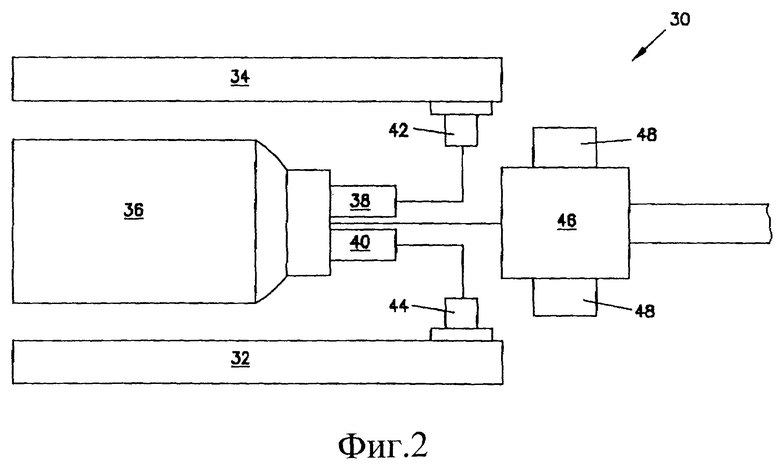
Фиг. 2 представляет собой обобщенную блок-схему конструктивного исполнения экскаватора в виде гусеничного траншеекопателя.
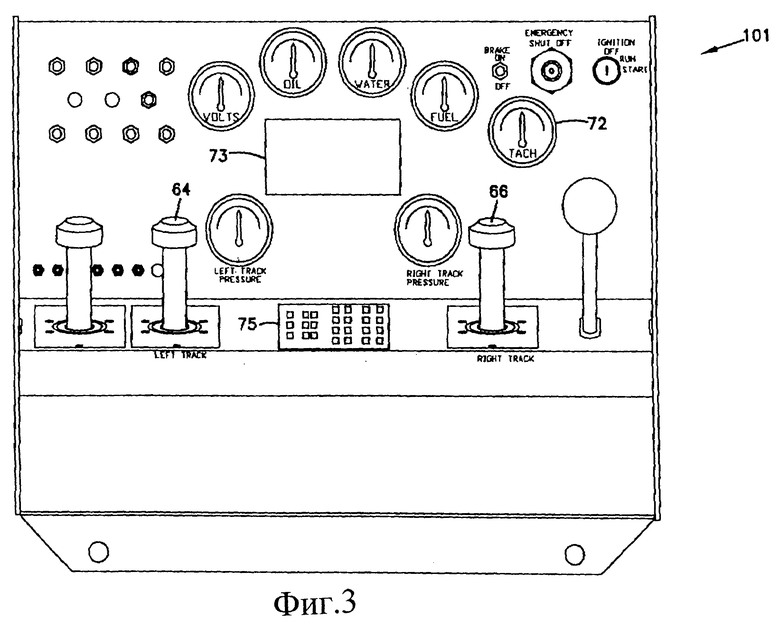
Фиг. 3 поясняет главный пользовательский интерфейс для управления гусеничным траншеекопателем, просмотра собранных геологических данных и данных о местоположении, а также для сопряжения с различными электронными и электромеханическими узлами экскаватора.
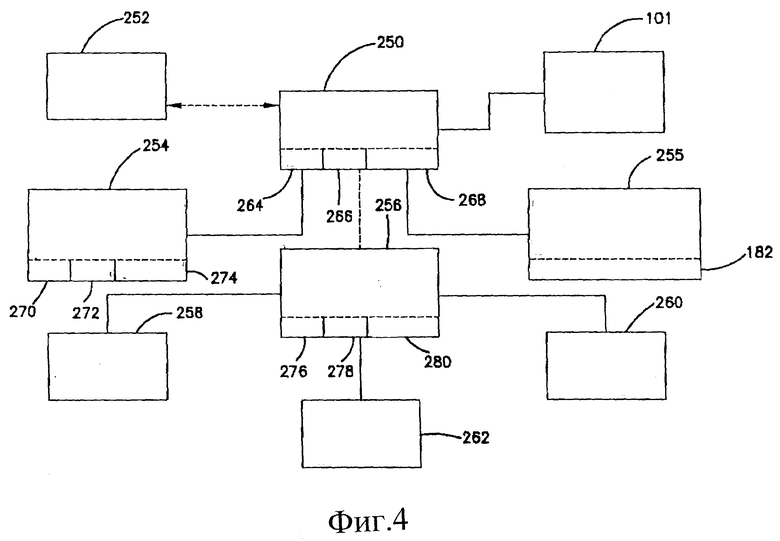
На фиг. 4 показана блок-схема главного блока управления новой системы сбора данных и управления экскаватором.
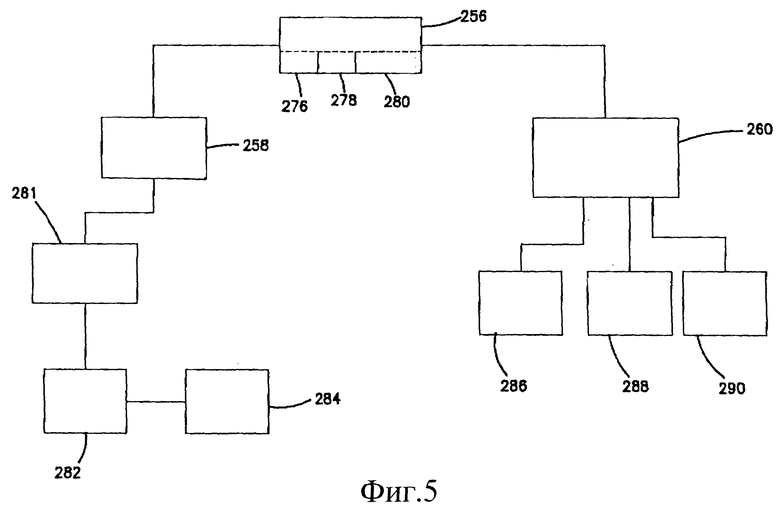
На фиг. 5 показана блок-схема блока сбора геологических данных, входящего в состав новой системы сбора данных и управления для экскаватора.
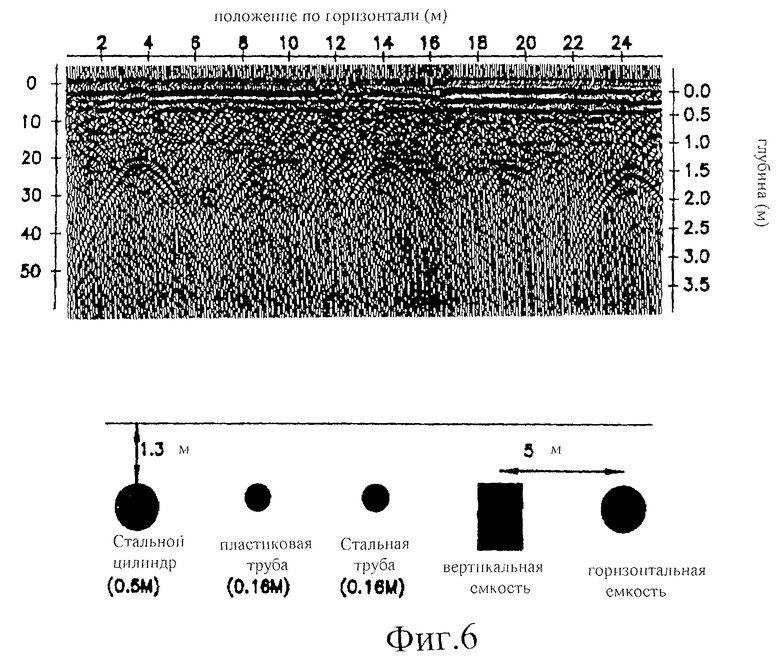
На фиг. 6 показан график отраженных электромагнитных сигналов, принимаемых радиолокационной системой зондирования грунта, использующей обычную одноосевую антенную систему.
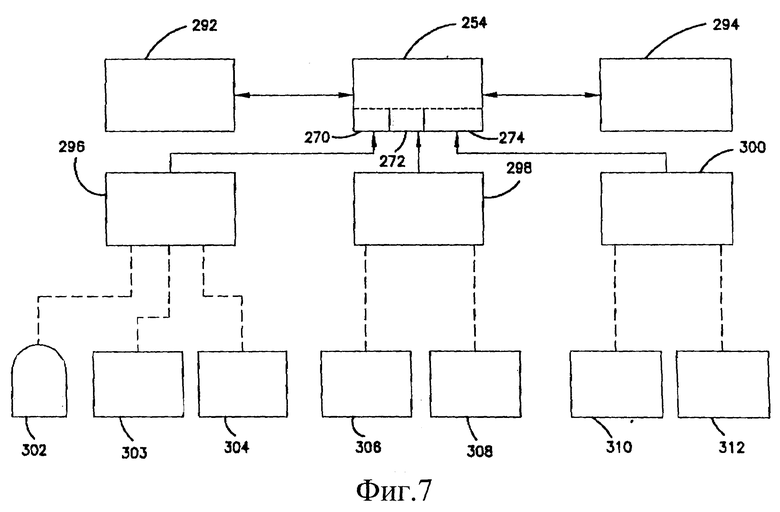
На фиг. 7 показана блок-схема блока определения географического местоположения, входящего в состав новой системы сбора данных и управления экскаватором.
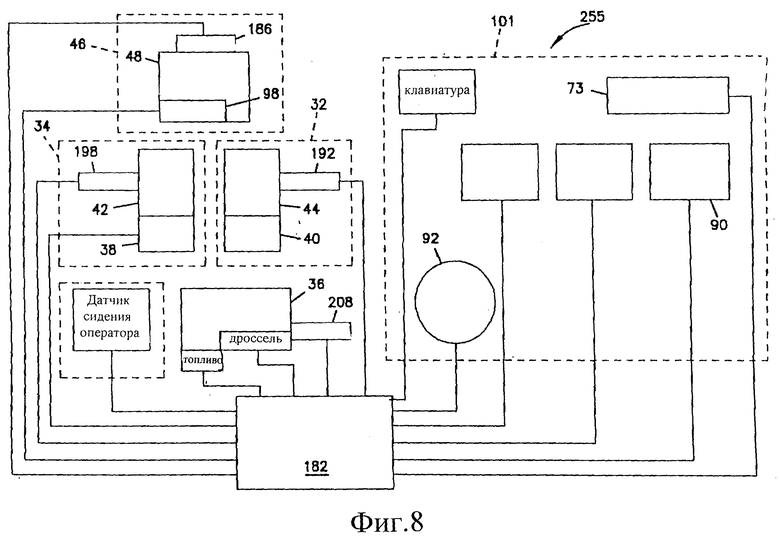
На фиг. 8 показана блок-схема блока управления экскаватором, входящего в состав новой системы сбора данных и управления экскаватором.
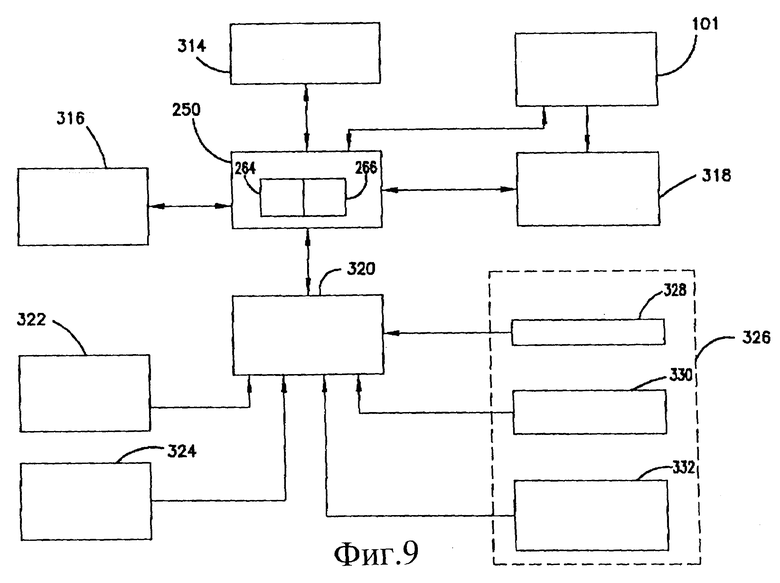
На фиг. 9 показана блок-схема различных баз данных и программного обеспечения, к которым имеет доступ главный блок управления и которые им обрабатываются.
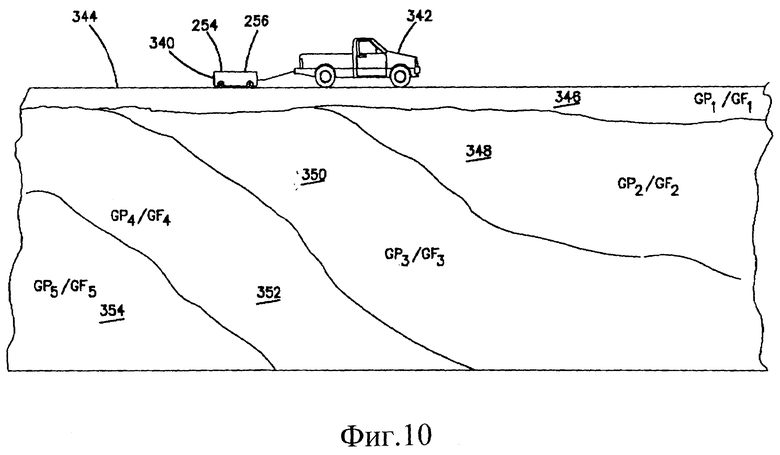
На фиг. 10 показан пример заданного участка земляных работ, имеющего разнородную подповерхностную геологию.
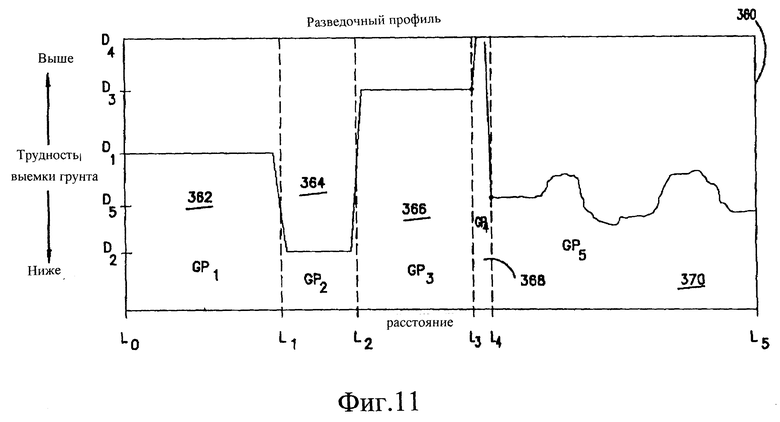
На фиг. 11 показан пример разведочного профиля в виде диаграммы, полученной для заданной трассы земляных работ с использованием нового блока сбора геологических данных и блока определения географического местоположения.
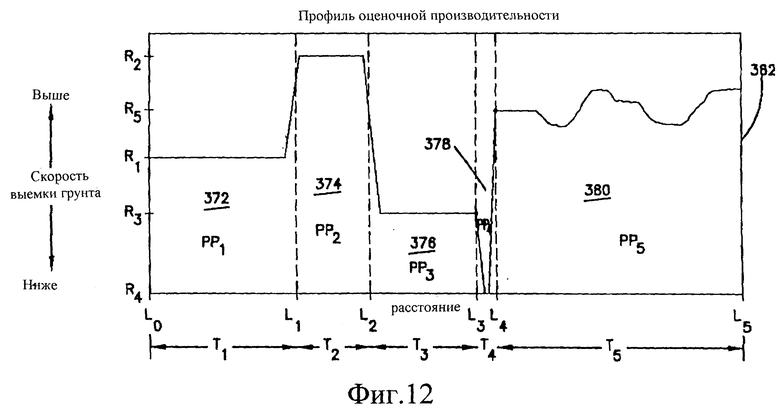
На фиг. 12 показан пример профиля производительности земляных работ в виде диаграммы, соответствующей диаграмме разведочного профиля, показанной на фиг. 11.
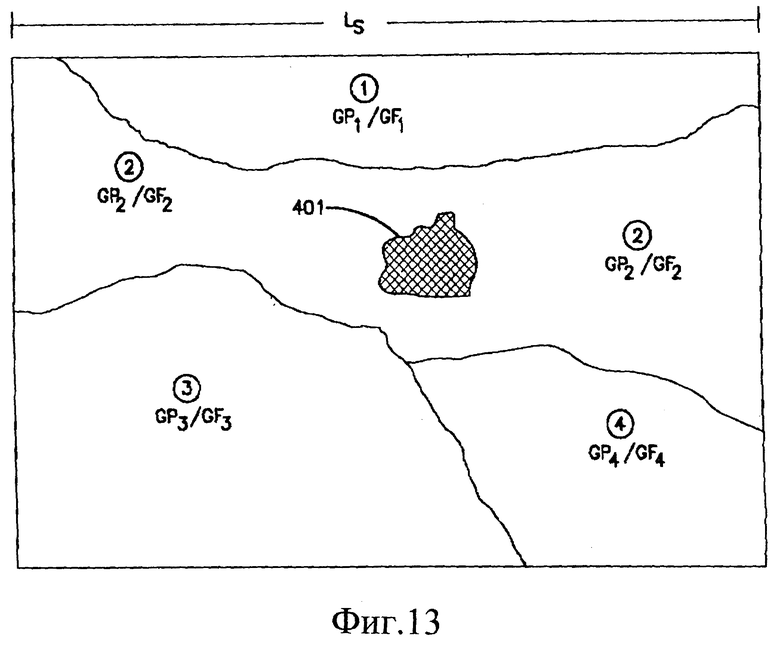
Фиг. 13 является иллюстрацией заданного участка земляных работ, имеющего разнородную подповерхностную геологию и неизвестный зарытый объект.
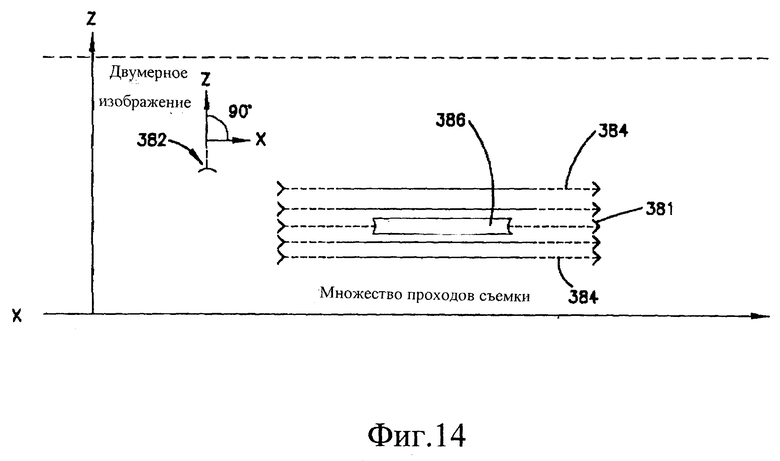
Фиг. 14 иллюстрирует традиционную одноосевую антенную систему, обычно используемую в радиолокационной системе зондирования грунта для формирования двумерного изображения подповерхностной геологии.
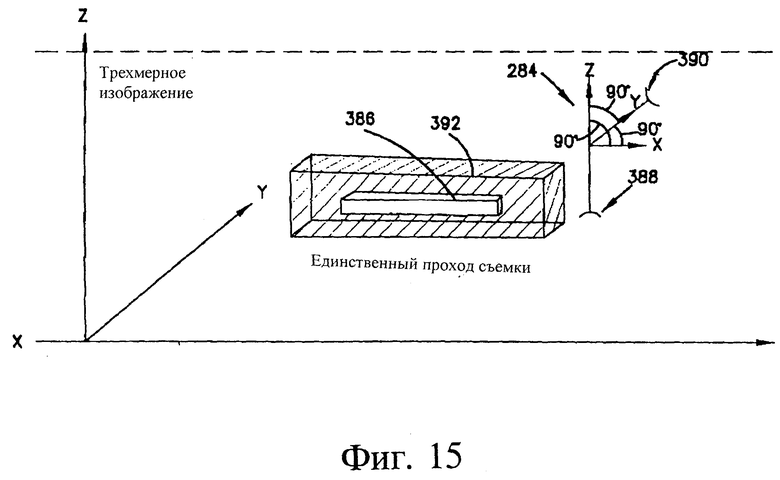
На фиг. 15 показан пример новой антенной системы, содержащей множество антенн, ориентированных ортогонально относительно друг друга, и предназначенной для использования в радиолокационной системе зондирования грунта, формирующей трехмерное изображение подповерхностной геологии.
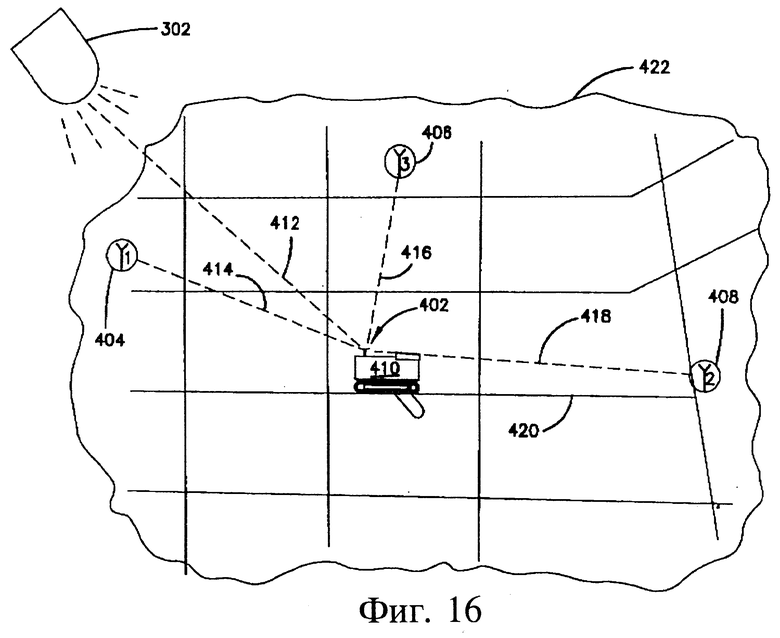
На фиг. 16 показан пример частичной сети городских улиц и экскаватор, оборудованный новой системой сбора данных и управления экскаватором, используемой для составления точной карты заданного участка земляных работ.
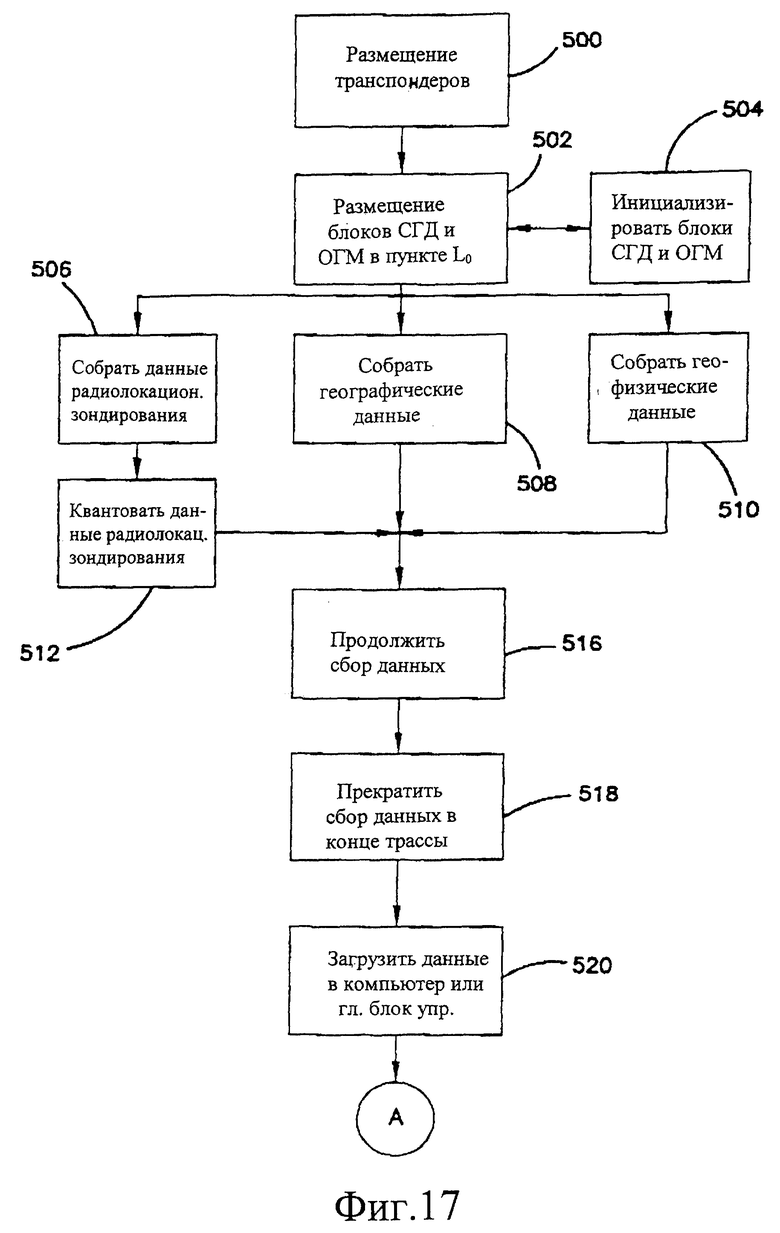
Фиг. 17-20 поясняют в виде блок-схемы алгоритма обобщенные операции нового способа сбора данных и управления экскаватором.
Подробное описание предпочтительных вариантов осуществления изобретения
Новая система и способ сбора данных и управления экскаватором обеспечивает существенное улучшение эффективности земляных работ (т.е. выемки грунта) и предварительной оценки их стоимости с помощью сбора и обработки геологической и геофизической информации, а также информации о географическом местоположении для отдельного участка земляных работ. Работа экскаватора предпочтительно оптимизируется путем изменения его рабочих параметров на основе собранных данных разведки и входных команд, получаемых от оператора экскаватора. Точность оценки ресурсов и затрат, связанных с работами по выемке земли на отдельном участке земляных работ, значительно увеличивается за счет выполнения вычислительного анализа собранных данных разведки до начала земляных работ на участке. Тем самым для подрядчика существенно уменьшается связанный с конкретным проектом земляных работ риск неправильного определения его стоимости из-за недостатка точной и подробной информации относительно геологии рассматриваемого участка земляных работ.
Преимущества и отличительные признаки новой системы и способа сбора данных и управления экскаватором в основном будут рассмотрены на примере одного конкретного типа экскаватора, называемого гусеничным траншеекопателем. Однако должно быть понятно, что гусеничный траншеекопатель представляет собой лишь одну из многих форм осуществления экскаватора, который может быть оборудован описываемой ниже новой системой сбора данных и управления. Таким образом, преимущества и особенности описываемых новых системы и способа не ограничиваются применениями, связанными с гусеничным траншеекопателем.
Обратимся теперь к чертежам и, в частности, к фиг. 1, на которой показан пример одного из конструктивных исполнений экскаватора, хорошо подходящего для встраивания новой системы сбора данных и управления. Типичный гусеничный траншеекопатель, показанный на фиг. 1 и 2, содержит двигатель 36, связанный с приводом 32 правой гусеницы и приводом 34 левой гусеницы, которые вместе образуют тяговую часть 45 гусеничного траншеекопателя 30. Землеройное приспособление 46, как правило присоединяемое к передней стороне тяговой части 45, обычно выполняет заданный вид операций по выемке грунта.
Ковшовая цепь 50 или другое землеройное приспособление 46 часто используется для того, чтобы рыть траншеи разной ширины и глубины с подходящей скоростью. Ковшовая цепь 50 в транспортной конфигурации 56, когда траншейный экскаватор 30 маневрирует по участку земляных работ, обычно остается над землей. Во время земляных работ цепь 50 опускается, проходит через грунт и выкапывает траншею с необходимой глубиной и скоростью, находясь в конфигурации 58 копания траншеи. Другое популярное приспособление для копания траншей, называемое в данной области техники скальным ротором, может управляться способом, аналогичным способу управления ковшовой цепью 50. Гусеничный траншеекопатель 30 хорошо подходит для эффективного рытья траншеи по заданной трассе земляных работ с целью укладки различных типов труб и коммунальных трубопроводов.
На фиг. 3 показан главный пользовательский интерфейс 101 гусеничного траншеекопателя 30. Управление поступательным движением гусеничного траншеекопателя 30 и его направлением во время работы в транспортном режиме обычно осуществляют, манипулируя рычагами 64 и 66 левой и правой гусениц, которые соответственно управляют приводами левой и правой гусениц 34 и 32. Например, перемещение рычага 66 правой гусеницы вперед обычно заставляет привод правой гусеницы 32 работать в прямом направлении и в зависимости от относительной скорости привода левой гусеницы 34 управляет гусеничным траншеекопателем 30 так, чтобы он двигался влево или вправо. Реверсирование привода правой гусеницы 32 обычно выполняют, отодвигая рычаг 66 правой гусеницы назад и заставляя тем самым привод правой гусеницы 32 работать в обратном направлении. Сообщение движения приводу левой гусеницы 34, по существу, осуществляется таким же образом, как описано в отношении привода правой гусеницы 32. Таким образом, как поступательным движением, так и его направлением управляют в основном с помощью рычагов 64 и 66 гусениц гусеничного траншеекопателя 30. Альтернативно, главный пользовательский интерфейс 101 может быть сконфигурирован так, чтобы обеспечивать независимое управление направлением движения и движением соответственно приводов правой гусеницы 32 и левой гусеницы 34.
Во время земляных работ часто бывает желательно поддерживать двигатель 36 на постоянном оптимальном уровне мощности, что, в свою очередь, позволяет приспособлению 46 работать с оптимальным уровнем производительности при выемке грунта. Согласно известному уровню техники пульт управления обычно содержит множество регуляторов и переключателей, включая переключатель диапазона скоростей, ручку регулирования числа оборотов в минуту, ручку точной регулировки управления направлением движения и ручку точной регулировки движения. Как правило, все они должны регулироваться во время обычной операции выкапывания траншеи, чтобы удерживать двигатель на желательном уровне мощности при изменении нагрузки на приспособление 46 и управлять направлением движения гусеничного траншеекопателя 30 в желательную сторону. Кроме того, пара потенциометров правого и левого насосов обычно требует регулирования и подрегулирования, чтобы выровнять рабочие характеристики левого и правого насосов 38 и 40.
Существенный недостаток обычного пульта управления гусеничного траншеекопателя связан с необходимостью быстрого реагирования оператора на изменения нагрузки двигателя 36 обычно сначала путем определения подходящего переключателя для регулирования и затем степени его регулирования. Обычно небольшие изменения поступательного движения выполняются ручкой точной регулировки движения. Средние изменения в уровне движения вперед гусеничного траншеекопателя 30 обычно производятся подстройкой ручки регулирования числа оборотов в минуту. Значительное изменение в уровне поступательного движения гусеничного траншеекопателя 30 обычно выполняется переключением переключателя скоростей из положения высокой скорости в положение средней или низкой скорости и подстройкой еще раз ручки точной регулировки движения и ручки регулирования числа оборотов в минуту, чтобы избежать остановки двигателя 36.
Новая система сбора данных и управления устраняет необходимость непрерывного ручного регулирования и подрегулирования множества переключателей, ручек и рычагов управления. Вместо этого интеллектуальный блок управления земляными работами используется для непрерывного контроля сети датчиков, которые преобразуют различные функции экскаватора в электрические сигналы, и обрабатывает эти и другие электрические сигналы так, чтобы лишь с минимальным вмешательством оператора экскаватора оптимизировать характеристики управления направлением движения и выемкой земли экскаватором. Усовершенствованный пользовательский интерфейс сообщает оператору необходимую информацию о работе экскаватора, а также геологические данные и данные о географическом местоположении предпочтительно с помощью дисплея, например жидкокристаллического дисплея или дисплея на электронно-лучевой трубке. На пользовательском интерфейсе предусматриваются клавиатура и другие рычаги и переключатели, чтобы осуществлять связь с системой сбора данных и управления и управлять работой экскаватора.
Система сбора данных и управления
Обратимся теперь к фиг. 4, на которой новая система сбора данных и управления показана в виде блок-схемы. В широком и общем смысле показанная на фиг. 4 система значительно улучшает работу экскаватора путем сбора геологической и геофизической информации, а также информации о местоположении, относящейся к определенному участку земляных работ, и путем использования этой информации для увеличения эффективности земляных работ. Сбор таких данных для участка земляных работ существенно уменьшает риск, связанный с оценкой стоимости и планированием конкретного проекта земляных работ. Сбор данных о географическом местоположении в реальном масштабе времени обеспечивает точное нанесение на карту области выемки грунта с целью точной идентификации местоположения и глубины, например, закопанных в землю труб и коммунальных трубопроводов, проложенных на участке земляных работ. Эти и другие существенные преимущества и отличительные признаки обеспечиваются новой системой и способом сбора данных и управления экскаватором, рассматриваемой ниже более подробно.
Как подробно показано на фиг. 4, главным компонентом обработки в новой системе сбора данных и управления является главный блок 250 управления, который в предпочтительном случае содержит центральный процессор 264, оперативное запоминающее устройство 266 и энергонезависимое запоминающее устройство 286, например электрически стираемое программируемое постоянное запоминающее устройство (EEPROM). Главный блок 250 управления предпочтительно содержит подходящие порты ввода-вывода, чтобы взаимодействовать с множеством других подсистем, которые собирают и обрабатывают данные различного вида, а также сопрягаются с системой управления экскаватором, чтобы замедлять и оптимизировать процесс земляных работ. Главный блок управления обеспечивает прием геологической информации от блока сбора геологической информации и информации о работе от блока управления машиной, имеющей землеройный орган (т.е. блока 255 управления экскаватором). Главный пользовательский интерфейс 101 в предпочтительном случае располагается вблизи сиденья оператора, установленного на экскаваторе, и обеспечивает средства взаимодействия с главным блоком 250 управления. Блок 255 управления экскаватором предназначен для управления режимом работы средств приведения в движение. Блок 255 взаимодействует с главным блоком 250 управления и реагирует на входные сигналы оператора, принимаемые от главного пользовательского интерфейса 101, чтобы совместно управлять работой экскаватора. При этом главный блок 250 управления оценивает параметры работы машины в ответ на геологическую информацию и информацию о работе, а блок 255 управления экскаватором изменяет режим работы средств приведения в движение в ответ на оценочные параметры работы машины. В предпочтительном случае в состав блока 255 управления экскаватором включается компьютер или программируемый контроллер 182, используемый для управления работой экскаватора и ее замедления.
Перемещение экскаватора и его направление перемещения в предпочтительном случае контролируется и, если необходимо, перемещение замедляется блоком 254 определения географического местоположения. Блок 254 определения географического местоположения, подключенный к главному блоку 250 управления для определения географического местоположения машины на заданной трассе, в предпочтительном случае содержит передвижной транспондер (повторитель сигналов), установленный на экскаваторе, и один или большее количество опорных транспондеров. Опорные сигналы местоположения, создаваемые опорными транспондерами, обрабатываются центральным процессором 270 блока 254 определения географического местоположения и преобразуются в данные географического местоположения, такие как данные широты, долготы, высоты и данные смещения от одного или нескольких опорных пунктов. Главный блок 250 управления связывает собираемую геологическую информацию с информацией о географическом местоположении, принятой от блока 254 определения географического местоположения, для получения оценочных параметров работы машины.
Главный блок 250 управления может быть подключен к запоминающему устройству, содержащему фильтрующую геологическую информацию, соответствующую известной геологии, при этом главный блок 250 управления фильтрует собранную геологическую информацию, используя фильтрующую геологическую информацию для удаления той собранной геологической информации, которая соответствует известной геологии. Далее, главный блок 250 управления может быть подключен к запоминающему устройству, содержащему данные о предшествующей работе машины, при этом блок 255 управления экскаватором изменяет режим работы средств приведения в движение в ответ на оценочные параметры работы машины и данные о предшествующей работе машины. Описываемая система сбора данных и управления для машины, имеющей землеройный орган, может также дополнительно содержать навигационные средства для вождения машины с использованием карты заданной трассы.
Важной составной частью новой системы сбора данных и управления является блок 256 сбора геофизических данных, который собирает различные виды геологических и геофизических данных для конкретного участка земляных работ. В одной из форм осуществления изобретения блок 256 сбора геофизических данных может быть отсоединен от главного блока 250 управления, чтобы обеспечить первоначальную разведку заданного участка земляных работ. После выполнения первоначальной разведки данные, собранные блоком 256 сбора геофизических данных, загружаются предпочтительно в оперативное запоминающее устройство 266 или электрически стираемое программируемое постоянное запоминающее устройство 286 главного блока управления 250. Альтернативно, блок 256 сбора геофизических данных предпочтительно постоянно соединен с экскаватором, непосредственно с главным блоком управления 250, для обеспечения в реальном масштабе времени сбора геофизических и геологических данных, а также данных о местоположении во время земляных работ. В еще одной форме осуществления изобретения предусматривается первоначальная разведка участка земляных работ для сбора соответствующих геофизических и геологических данных, а также данных о местоположении, которые загружаются в главный блок управления 250 после завершения первоначальной разведки. Бортовой блок 256 сбора геофизических данных, который предпочтительно содержит блоки, используемые при первоначальной разведке, обеспечивает в реальном масштабе времени сбор данных, которые в сочетании с собранными при первоначальной разведке данными могут использоваться для оптимизации производительности экскаватора. В предпочтительном случае блок 256 сбора геофизических данных содержит центральный процессор 276, оперативное запоминающее устройство 278 и электрически стираемое программируемое постоянное запоминающее устройство 280.
Среди различных видов данных, собираемых блоком 256 сбора геофизических данных, при оптимизации производительности экскаватора и при оценке затрат и ресурсов на конкретный проект земляных работ особую важность имеют данные, соответствующие специфической геологии места земляных работ и дополняющие физические характеристики такой геологии. Блок 258 отображения геологической информации в предпочтительном случае подключен к блоку 256 сбора геофизических данных, чтобы предоставлять информацию, относящуюся к определенной геологии, связанной с участком земляных работ. Различные геофизические характеристики, связанные с определенной геологией участка земляных работ, в предпочтительном случае определяются блоком 260 получения геофизических характеристик. Вспомогательный пользовательский интерфейс 262 предпочтительно подключен к блоку 256 сбора геофизических данных для просмотра на месте собранных данных и изображений и для предоставления оператору средств взаимодействия с блоком 256 сбора геофизических данных. Вспомогательный пользовательский интерфейс 262 особенно полезен в том варианте осуществления изобретения, в котором блок 256 сбора геофизических данных отсоединяется от главного блока управления для выполнения первоначальной разведки участка земляных работ. Следует отметить, что линии последовательной передачи данных RS-232 обеспечивают достаточную ширину полосы для эффективной связи между электронными блоками и приборами новой системы сбора данных и управления.
Блок сбора геофизических данных
Как показано на фиг. 5, блок 256 сбора геофизических данных в предпочтительном случае содержит блок 258 отображения геологической информации и блок 260 определения геофизических характеристик. Блок 260 получения геофизических характеристик в предпочтительном случае содержит несколько геофизических приборов, которые обеспечивают получение физических характеристик геологии для конкретного участка земляных работ. Модуль 286 составления сейсмической карты содержит электронные приборы, в состав которых входят многочисленные геофизические датчики давления. Сеть этих датчиков устанавливается с определенной ориентацией относительно экскаватора так, чтобы создать непосредственный контакт с грунтом. Сеть датчиков измеряет волны давления, создаваемые в грунте под экскаватором и в стенках траншеи, образуемой экскаватором. Анализ волн давления в грунте, принимаемых сетью датчиков, обеспечивает основу для определения физических характеристик подповерхностной области на участке земляных работ. В предпочтительном случае эти данные обрабатываются центральным процессором 276 блока 256 сбора геофизических данных или, альтернативно, центральным процессором 264 главного блока управления 250.
Тестер 288 точечной нагрузки может использоваться для получения геофизических характеристик подповерхностной области на участке земляных работ. В предпочтительном случае тестер 288 точечной нагрузки использует множество конических головок для точек нагрузки, которые в свою очередь вводятся в соприкосновение с грунтом, чтобы определить степень сопротивления конкретной подповерхностной области калиброванному уровню нагрузки. Данные, собираемые тестером 288 точечной нагрузки, обеспечивают информацию, соответствующую геофизической механике тестируемого грунта. Эти данные могут также передаваться в блок 256 сбора геофизических данных для записи в оперативное запоминающее устройство 278 или электрически стираемое программируемое постоянное запоминающее устройство 280.
Блок 260 определения геофизических характеристик в предпочтительном случае содержит молот 290 Шмидта, являющийся геофизическим прибором, который измеряет характеристику релаксационной твердости для образца подповерхностной геологии. Другие геофизические приборы также могут использоваться для измерения характеристик относительного поглощения энергии скальными массами, абразивных характеристик, объема камней, качества породы и других физических характеристик, которые совместно обеспечивают информацию, касающуюся относительных трудностей, связанных с земляными работами при данной геологии. Данные, собранные с помощью молота 290 Шмидта, в предпочтительном случае также записываются в оперативное запоминающее устройство 278 или электрически стираемое программируемое постоянное запоминающее устройство 280 блока 256 сбора геофизических данных.
Блок 258 отображения геологической информации в предпочтительном случае содержит радиолокационную систему 282 зондирования грунта и антенную систему 284. Радиолокационная система 282 зондирования грунта работает совместно с антенной системой 284 для излучения электромагнитных сигналов в подповерхностную область участка земляных работ. Исходные электромагнитные сигналы проникают в подповерхность и отражаются обратно к антенной системе 284. Отраженные электромагнитные сигналы, принимаемые антенной системой 284, усиливаются и приводятся к требуемому виду радиолокационной системой 282 зондирования грунта. В одной форме осуществления изобретения отраженные аналоговые электромагнитные сигналы, обрабатываемые радиолокационной системой 282 зондирования грунта, предпочтительно преобразуются в цифровую форму и квантуются квантующим устройством 281. В другой форме осуществления изобретения цифровая радиолокационная система 282 зондирования грунта выполняет аналого-цифровое преобразование отраженных аналоговых электромагнитных сигналов. Преобразованные в цифровую форму данные, собираемые блоком 258 отображения геологической информации, в предпочтительном случае записываются в оперативное запоминающее устройство 278 или электрически стираемое программируемое постоянное запоминающее устройство 280 в блоке 256 сбора геофизических данных.
Обратимся теперь к фиг. 6, на которой показана наглядная иллюстрация типичных данных, отображающих геологическую информацию, получаемую от радиолокационной системы 282 зондирования грунта, использующей обычную одноосевую антенную систему 284. На фиг. 6 отображены данные радиолокационной системы 282 зондирования грунта, собранные на испытательной площадке, имеющей пять различных искусственных препятствий, зарытых на глубине около 1,3 м в песчаную почву с уровнем грунтовых вод, расположенным на глубине приблизительно от четырех до пяти метров. Следует заметить, что данные, приведенные на фиг. 6, являются типичными для данных, обычно получаемых при использовании системы PulseEKKO, выпускаемой фирмой Sensors and Software, Inc., с применением одноосевой антенны с центральной частотой 450 МГц. К другим радиолокационным системам 282 зондирования грунта, которые могут быть пригодны для данного применения, принадлежат SIR System-2 и System-10A фирмы Geophysical Survey Systems, Inc. и модель 1000B STEPPED-FM радара для зондирования грунта, производимого фирмой GeoRadar, Inc.
Каждое из зарытых препятствий, показанных на фиг. 6, связано со своей характеристической гиперболической кривой времени - местоположения. Вершина характеристической гиперболической кривой указывает как местоположение, так и глубину зарытого препятствия. Из графика на фиг. 6 можно видеть, что каждое из зарытых препятствий расположено примерно на 1,3 м ниже поверхности земли, причем каждое из препятствий отделено от соседних препятствий расстоянием по горизонтали около пяти метров. Данные радиолокационной системы 282 зондирования грунта, показанные на фиг. 6, представляют собой данные, отображающие геологию и собранные с использованием обычной одноосевой антенной системы 284, и как таковые обеспечивают только двумерное представление обследуемой подповерхностной области. Как будет подробно описано ниже, новая антенная система 284, содержащая несколько антенн, расположенных ортогонально, обеспечивает улучшенное трехмерное изображение подповерхностной геологии, соответствующей определенному участку земляных работ.
Блок определения географического местоположения
Обратимся теперь к фиг. 7, на которой подробно показан блок 254 определения географического местоположения, обеспечивающий получение информации о географическом местоположении, касающейся позиции, движения и направления движения экскаватора на участке земляных работ. В одной из форм осуществления изобретения блок 254 определения географического местоположения обменивается данными с одним или несколькими внешними источниками опорных сигналов, чтобы определить информацию, касающуюся местоположения экскаватора относительно одного или нескольких известных опорных пунктов. Относительное перемещение экскаватора по определенной трассе земляных работ в предпочтительном случае определяется центральным процессором 270 блока 254 определения географического местоположения и записывается в виде данных о местоположении в оперативное запоминающее устройство 272 или электрически стираемое программируемое постоянное запоминающее устройство 274.
В другой форме осуществления изобретения данные о географическом местоположении для заданной трассы земляных работ предпочтительно собираются до выполнения земляных работ на трассе. Данные о местоположении могут вводиться в навигационный контроллер 292, который работает вместе с главным блоком 250 управления и блоком 255 управления экскаватором, для осуществления аналогичного автопилоту управления и маневрирования экскаватора по заданной трассе земляных работ. В еще одной форме осуществления изобретения данные о географическом местоположении, собираемые блоком 254 определения географического местоположения, предпочтительно передаются в базу 294 данных для отображения трассы на карте, которая хранит для данного участка земляных работ данные о расположении таких объектов, как сеть городских улиц или площадка для игры в гольф, под которыми проложены различные коммунальные, водопроводные, связные и другие трубопроводы. Данные, хранящиеся в базе 294 данных для отображения трассы на карте, могут быть впоследствии использованы для составления карты землемерной съемки, которая точно определяет местоположение и глубину различных коммунальных трубопроводов, зарытых в определенном районе земляных работ.
В одной форме осуществления изобретения для снабжения блока 254 определения географического местоположения данными о местоположении используется спутниковая глобальная радионавигационная система 296 (GPS). В соответствии с проектом правительства США развернуть 24 спутника связи в трех орбитальных группах, называемым глобальной радионавигационной системой GPS или NAVSTAR, различные сигналы, передаваемые одним или несколькими спутниками этой системы, могут быть непрямым образом использованы для определения смещения экскаватора относительно одного или нескольких опорных пунктов. Известно, что спутниковая глобальная радионавигационная система GPS правительства США имеет скрытный или защищенный диапазон и гражданский диапазон. Как правило, защищенный диапазон обеспечивает определение местоположения с высокой точностью, приблизительно от 0,3 до 3 м. Однако защищенный диапазон обычно резервируется исключительно для военных и правительственных целей и задач наблюдения и использует такую модуляцию, чтобы сделать его фактически бесполезным для гражданских применений. Гражданский диапазон использует такую модуляцию, которая значительно снижает его полезность при высокоточных применениях. В большинстве применений типичная точность определения местоположения при использовании гражданского диапазона составляет приблизительно от 30 до 90 м.
Тем не менее гражданский диапазон глобальной радионавигационной системы может быть непрямым образом использован для относительно высокоточного определения местоположения при применении одного или нескольких гражданских сигналов глобальной радионавигационной системы в сочетании с одним или несколькими сигналами от наземных опорных источников. При использовании различных известных методов обработки сигналов, обычно называемых методами обработки разностных сигналов глобальной радионавигационной системы, может быть достигнута точность порядка 0,3 м и лучше. Как показано на фиг. 7, глобальная радионавигационная система 296 использует сигнал, создаваемый по меньшей мере одним спутником 302 глобальной радионавигационной системы, совместно с сигналами, создаваемыми по меньшей мере двумя базовыми транспондерами 304, хотя в некоторых применениях может быть достаточным использование одного базового транспондера 304. Различные известные способы использования разностных сигналов глобального определения местоположения, использующие один или несколько базовых транспондеров 304 вместе с сигналом 302 спутника этой системы и подвижным приемником 303 глобальной радионавигационной системы, установленным на экскаваторе, могут быть применены для точного определения перемещения экскаватора относительно опорных базовых транспондеров 304 с использованием сигнала спутника глобальной радионавигационной системы.
В другой форме осуществления изобретения может применяться наземная навигационная система, использующая дальномерную радиолокационную систему 298. Дальномерная радиолокационная система 298 в предпочтительном случае содержит множество базовых радиочастотных транспондеров 306 и подвижный транспондер 308, установленный на экскаваторе. Базовые транспондеры излучают радиочастотные сигналы, которые принимаются подвижным транспондером 308. Подвижный транспондер 308 в предпочтительном случае содержит компьютер, который вычисляет расстояние от подвижного транспондера 308 до каждого из базовых транспондеров 306 посредством различных радиолокационных способов и затем рассчитывает его местоположение относительно всех базовых транспондеров 306. Данные о местоположении, собранные дальномерной радиолокационной системой 298, в предпочтительном случае записываются в оперативное запоминающее устройство 272 или электрически стираемое программируемое постоянное запоминающее устройство 274 блока 254 определения географического местоположения.
В еще одной форме осуществления изобретения ультразвуковая система 300 определения местоположения может использоваться вместе с базовыми транспондерами 310 и подвижным транспондером 312, установленным на экскаваторе. Базовый транспондер 310 излучает сигналы, имеющие известную временную базу синхронизации и принимаемые подвижным транспондером 312. Подвижный транспондер 312 в предпочтительном случае содержит компьютер, который вычисляет расстояние от подвижного транспондера 312 до каждого из базовых транспондеров 310 на основе скорости сигнала синхронизации ультразвуковых волн источника. Компьютер подвижного транспондера 312 вычисляет также местоположение экскаватора относительно всех базовых транспондеров 310. Должно быть ясно, что другие известные наземные и спутниковые системы могут быть использованы для точного определения перемещения экскаватора по заданной трассе земляных работ.
Блок управления экскаватором
Обратимся теперь к фиг. 8, на которой показана блок-схема блока 255 управления экскаватором, который взаимодействует с главным блоком управления 250, чтобы координировать управление экскаватором. В соответствии с показанной на фиг. 1 и 2 формой осуществления гусеничного траншеекопателя 30, привод левой гусеницы 34 обычно содержит насос 38 левой гусеницы, соединенный с двигателем 42 левой гусеницы, а привод правой гусеницы 32 обычно содержит насос 40 правой гусеницы, соединенный с двигателем 44 правой гусеницы. Датчики 198 и 192 в предпочтительном случае соединены с двигателями 42 и 44 левой и правой гусениц соответственно. Насосы 38 и 40 левой и правой гусениц, отбирающие мощность от двигателя 36, в предпочтительном случае регулируют поток масла к двигателям 42 и 44 левой и правой гусениц, которые, в свою очередь, приводят в движение приводы 34 и 32 левой и правой гусениц. Землеройное приспособление 46 в предпочтительном случае содержит двигатель 48 и устройство 98 управления. В предпочтительном случае приспособление 46 отбирает мощность у двигателя 36. Датчик 186 предпочтительно соединен с двигателем 48 приспособления. Приведение в действие двигателя 42 левой гусеницы, двигателя 44 правой гусеницы и двигателя 48 приспособления контролируется датчиками 198, 192 и 186 соответственно. Выходные сигналы, создаваемые датчиками 198, 192 и 186, передаются в компьютер 182.
В ответ на сигналы управления направлением движения и движением, формируемые устройством 92 управления направлением движения и устройством 90 управления движением, компьютер 182 передает сигналы управления, обычно в форме управляющего тока, на насосы 38 и 40 левой и правой гусениц, которые, в свою очередь, регулируют скорость, с которой работают двигатели 42 и 44 левой и правой гусениц. Датчики 198 и 192 двигателей левой и правой гусениц передают сигналы измерения режимов двигателей гусениц на компьютер 182, указывающий действительную скорость двигателей 42 и 44 левой и правой гусениц. Аналогично, датчик 208 двигателя, соединенный с двигателем 36, подает сигнал измерения режима в компьютер 182, завершая таким образом систему управления с обратной связью для части 45 привода трактора гусеничного траншеекопателя 30. Для специалистов в данной области техники понятно, что могут быть использованы различные известные компьютерные конфигурации для внесения изменений в поступательное движение гусеничного траншеекопателя 30 и его направление в ответ на соответствующие сигналы, формируемые устройствами 90 и 92 управления движением и управления направлением движения.
Землеройное приспособление 46 гусеничного траншеекопателя 30 содержит двигатель 48, устройство 98 управления и по меньшей мере один датчик 186. Двигатель 48 приспособления предпочтительно реагирует на команды, подаваемые на устройство 98 управления приспособлением из компьютера 182. Действительная мощность двигателя 48 приспособления контролируется датчиком 186 приспособления, который формирует сигнал измерения режима приспособления, принимаемый компьютером 182.
В одной из форм осуществления изобретения датчики 198 и 192 двигателей левой и правой гусениц являются датчиками такого вида, которые в данной области техники обычно называются магнитоимпульсными датчиками. Магнитоимпульсные датчики 198 и 192 преобразуют вращение двигателя гусеницы в непрерывную последовательность импульсных сигналов, причем последовательность импульсов в предпочтительном случае представляет частоту вращения двигателя гусеницы, измеряемую в оборотах в минуту. Если выбирается транспортный режим перемещения, то устройство 90 управления движением формирует сигнал управления транспортным движением, который отражает заданную скорость вращения двигателей 42 и 44 левой и правой гусениц, обычно измеряемую в оборотах в минуту. Преобразование сигнала управления транспортным движением в заданную скорость вращения двигателя может осуществляться самим устройством 90 управления движением или в предпочтительном случае компьютером 182. Компьютер 182 обычно сравнивает сигналы измерения режимов двигателей правой и левой гусениц, формируемые соответственно магнитоимпульсными датчиками 198 и 192, с заданной скоростью движения двигателя гусеницы, представляемой сигналом транспортного движения. Компьютер 182 подает надлежащие сигналы управления насосами на левый и правый насосы 38 и 40 в ответ на результат сравнения, чтобы компенсировать любые различия между действительной и заданной скоростью движения двигателей гусениц.
Дисплей 73 подключен к компьютеру 182, блоку сбора геофизических данных (для показа изображения подповерхностной области, полученного с использованием отраженного сигнала) или, альтернативно, к главному блоку 250 управления и в предпочтительном случае выводит сообщения, показывающие рабочее состояние, диагностику, калибровку, неисправности, безопасность и другую информацию такого рода для оператора. Дисплей 73 предоставляет оператору быструю, точную и легко воспринимаемую информацию благодаря интерпретирующей способности компьютера 182, который собирает и обрабатывает данные от множества датчиков гусеничного траншеекопателя и различных геологических и геофизических приборов. На дисплее 73 визуально отображаются, например, данные, отображающие геологические характеристики и соответствующую геофизическую информацию. Кроме того, на дисплее 73 отображается информация, касающаяся местоположения экскаватора, когда он движется по заданной трассе земляных работ, а также информация о качестве сигнала, принимаемая от блока 254 определения географического местоположения. У главного пользовательского интерфейса 101 предусмотрена также клавиатура 75, чтобы дать возможность оператору вести диалог с блоком 255 управления экскаватором и главным блоком 250 управления.
Главный блок управления
Обратимся теперь к фиг. 9, на которой показана блок-схема различных баз данных и программного обеспечения, которые используются главным блоком 250 управления при доступе к геологическим и геофизическим данным, данным о местоположении, а также к рабочим данным, относящимся к разведке выбранного участка земляных работ и выполнению этих земляных работ, а также при обработке этих данных. Например, данные, собираемые блоком 256 сбора геофизических данных, предпочтительно хранятся в базе 326 данных, которая включает в себя базу 328 данных радиолокационной системы зондирования грунта, базу данных 330 геологического фильтра и базу 332 геофизических данных. Данные радиолокационной системы 282 зондирования грунта, как было рассмотрено выше, в предпочтительном случае преобразуются в цифровую форму и хранятся в базе 328 данных радиолокационной системы зондирования грунта в подходящем цифровом формате, пригодном для соотнесения с данными, хранящимися в других базах данных системы. База данных 330 геологического фильтра, как будет подробно рассмотрено ниже, содержит фильтрующие данные, образующиеся при осуществлении корреляции данных радиолокационной системы зондирования грунта с соответствующими данными производительности экскаватора, хранящимися в базе 324 данных землеройных работ. Программа 320 корреляции и оптимизации осуществляет корреляцию данных радиолокационной системы зондирования грунта с данными о реальной производительности экскаватора, чтобы разработать ряд подстраиваемых геологических цифровых фильтров, которые могут фактически накладываться на данные геологического изображения, собираемые в реальном масштабе времени. Это позволяет исключить или "отфильтровать" проверенные геологические данные, оставляя таким образом непроверенные изображения, характерные для одного или нескольких подземных препятствий. Например, конкретный тип почвы создает характерное отраженное радиолокационное изображение, которое может быть коррелировано с различными рабочими параметрами экскаватора, такими как скорость двигателя 48 землеройного приспособления, нагрузка на двигатель 36 и изменение скорости двигателей 42 и 44 левой и правой гусениц.
Параметр или набор параметров "трудности землеройных работ" в предпочтительном случае вычисляется на основе рабочих параметров экскаватора. Параметры "трудности землеройных работ" затем связываются с данными характеристического отраженного радиолокационного изображения, соответствующими отдельной геологии, такой как, например, гранит. Набор параметров фильтра "трудности землеройных работ" и соответствующие значения характеристического отраженного радиолокационного изображения в предпочтительном случае подготавливаются для широкого диапазона грунтов и скал и хранятся в базе 330 данных геологического фильтра.
База 316 данных статистики землеройных работ в предпочтительном случае принимает файлы данных от программы 320 корреляции и оптимизации и компилирует статистические данные, чтобы отражать действительные характеристики производительности экскаватора для специфической геологии, технического обслуживания и оборудования. В одной из форм осуществления изобретения данные радиолокационной системы зондирования грунта и геофизические данные собираются блоком 256 сбора геофизических данных во время первоначальной разведки заданной трассы землеройных работ. Эти данные в предпочтительном случае загружаются в базу 316 данных о статистике землеройных работ перед выкапыванием заданной трассы. Данные, хранящиеся в базе 316 данных о статистике землеройных работ, могут рассматриваться как оценка производительности в образцовых геологических условиях на основе последних характеристик производительности экскаватора.
Главный блок 250 управления выполняет программу 318 управления блоком управления экскаватора, которая получает файлы данных от программы 320 корреляции и оптимизации и входные команды, принимаемые от главного пользовательского интерфейса 101. Программа 318 управления блоком управления экскаватора формирует текущий рабочий стандарт для работы экскаватора на линии заданной трассы земляных работ. Если входные данные, принимаемые от главного пользовательского интерфейса 101, вызывают изменение рабочего стандарта, то программа 318 управления блоком управления экскаватора формирует модифицированные рабочие команды для экскаватора, которые передаются на главный блок 250 управления и блок 255 управления экскаватором, который, в свою очередь, изменяет работу экскаватора в соответствии с измененным рабочим стандартом.
Запоминающее устройство 314 журнала технического обслуживания в предпочтительном случае содержит энергонезависимое запоминающее устройство для хранения различных видов информации о техническом обслуживании экскаватора. В предпочтительном случае в состав запоминающего устройства 314 журнала технического обслуживания входит индикатор времени эксплуатации, который показывает прошедшее время работы экскаватора. По истечении определенных интервалов времени эксплуатации, которые в предпочтительном случае хранятся в запоминающем устройстве 314 журнала технического обслуживания, на главный пользовательский интерфейс 101 выводится подсказка оператору о необходимости планового обслуживания. Подтверждение планового обслуживания, вид обслуживания, дата обслуживания и другая информация, относящаяся к данному вопросу, в предпочтительном случае вводятся через главный пользовательский интерфейс 101 для постоянного хранения в запоминающем устройстве 314 журнала технического обслуживания. В одной из форм осуществления изобретения запоминающее устройство 314 журнала технического обслуживания предпочтительно содержит таблицу назначенных на заводе рабочих значений и диапазонов рабочих значений, соответствующих номинальному режиму эксплуатации экскаватора. С каждым рабочим значением и диапазонами значений связан счетчик состояния, содержимое которого получает приращение при каждом случае работы экскаватора вне предписанных значений или диапазонов значений. Информация счетчика состояния используется для определения степени работы экскаватора вне диапазонов, указанных на заводе, что особенно полезно при определении допустимости гарантийного ремонта.
Геологическая разведка и отображение ее результатов
Обычно, как показано на фиг. 10, заданная трасса земляных работ первоначально обследуется с использованием блока 254 определения географического местоположения и блока 256 сбора геофизических данных. В одной из форм осуществления изобретения эти блоки 254 и 256 размещаются на транспортной тележке 340, которая буксируется по заданной трассе земляных работ автомобилем 342. В иллюстративном примере, показанном на фиг. 10, трассой земляных работ является сельская дорога, под которой необходимо проложить коммунальный трубопровод. Когда транспортная тележка 340 буксируется по дороге 344, данные, принимаемые от блока 258 отображения геологии, собираются с целью определения свойств грунта подповерхностной области под дорогой 344.
Блок 258 отображения геологии в предпочтительном случае содержит радиолокационную систему 282 зондирования грунта, которая обычно калибруется для зондирования на заранее установленную глубину, соответствующую необходимой глубине выкапывания. В зависимости от заранее определенной глубины выкапывания вдоль заданной трассы земляных работ могут встретиться различные типы почв и скал. Как показано на фиг. 10, слой дорожной насыпи 346, который лежит непосредственно под дорогой 344, связан с характеристическим геологическим профилем GP1 и с соответствующим профилем GF1 геологического фильтра, который, как было рассмотрено ранее, представляет корреляцию между данными характеристики производительности при земляных работах и данными отраженного радиолокационного изображения для отдельного типа грунта. Когда транспортная тележка 340 движется по дороге 344, обнаруживаются различные типы грунтов и подповерхностных структур, таких как песчаный слой 354, гравий 352, коренная порода 350 и естественный грунт 348, каждый из которых имеет характеристический геологический профиль и профиль геологического фильтра.
После завершения первоначальной разведки данные, собранные и хранящиеся в блоке 256 сбора геофизических данных и блоке 254 определения географического местоположения, в предпочтительном случае загружаются в отдельный персональный компьютер 252. Персональный компьютер 252 предпочтительно содержит программу статистической обработки для земляных работ и соответствующую базу 316 данных для корреляции собираемых данных разведки с предшествующими данными производительности экскаватора, чтобы образовать оценку в виде ожидаемой рабочей характеристики экскаватора по разведанному маршруту. Далее оценки характеристик могут использоваться в качестве основы для расчета времени и затрат, связанных с выполнением землеройных работ в отдельном районе, исходя из действительных геологических данных и предшествующих данных характеристики производительности экскаватора.
После завершения первоначальной разведки и перед началом земляных работ на разведанной трассе блок 256 сбора геофизических данных предпочтительно подключается к главному блоку 250 управления на экскаваторе. Во время земляных работ, как было рассмотрено выше, различные базы данных, содержащие геологические и геофизические данные, данные о местоположении, а также данные о производительности экскаватора обрабатываются главным блоком 250 управления. Главный блок 250 управления во взаимодействии с блоком 255 управления экскаватором подстраивает режим работы экскаватора, когда он движется и выполняет выемку грунта по разведанной трассе, чтобы оптимизировать землеройные работы.
Обратимся теперь к фиг. 11, на которой показан пример разведочного профиля, полученный при транспортировке блока 256 сбора геофизических данных и блока 254 определения географического местоположения по заданной трассе земляных работ. Необходимо отметить, что в данном иллюстративном примере длина трассы земляных работ определяется как расстояние между пунктом L0 и пунктом L5. Соответствующий профиль оцениваемой производительности экскаватора для заданной трассы земляных работ показан на фиг. 12.
Если рассмотреть фиг. 11 более подробно, то в пунктах L1, L2, L3 и L4 можно наблюдать определенные изменения в геологических характеристиках подповерхностной области, которые связаны с соответствующими изменениями параметра "трудности земляных работ", нанесенном по оси ординат на графике разведочного профиля. Например, между пунктами L0 и L1 геологический профиль 362 GP1 подповерхностной области связан с соответствующим ему параметром "трудности земляных работ" D1. Данные отображения геологических условий в пункте L1 показывают переход к грунту, имеющему геологический профиль 364 GP2 и соответствующий параметр "трудности земляных работ" D2, и таким образом показывают переход к относительно более мягкому грунту.
Данные профиля оценочной производительности при земляных работах, приведенные на фиг. 12, показывают соответствующий переход от начального профиля производительности 372 PP1 к другому профилю производительности 374 PP2 в пункте L1. Следует отметить, что скорость земляных работ отложена по оси ординат графика профиля производительности при земляных работах. Исходя из данных разведочного профиля для геологических характеристик подповерхностной области между пунктами L0 и L2 можно видеть, что начальная скорость земляных работ равна R1 для участка заданной трассы земляных работ между пунктами L0 и L1 и скорость земляных работ повышается для участка между пунктами L1 и L2 вследствие более низкого значения параметра "трудности земляных работ" D2, относящегося к геологическому профилю 364 GP2. Можно видеть, что аналогичная взаимосвязь существует между конкретным параметром трудности земляных работ и соответствующим ему оценочным параметром скорости земляных работ.
В общем, параметры трудности земляных работ с повышенными значениями связаны с соответствующими параметрами скорости земляных работ, имеющими пониженные значения. Общая обратная зависимость отражает тот факт, что выемка относительно твердого грунта, такого как гранит, приводит к относительно низкой скорости земляных работ, в то время как выемка относительно мягкого грунта, такого как песок, приводит к относительно высоким скоростям земляных работ. Следует заметить, что в связи с каждым отдельным геологическим профилем (GPx) и профилем производительности (PPx) существует соответствующее время выемки грунта, например время выемки грунта T1, связанное с геологическим профилем 362 GP1 и профилем производительности 372 PP1. По существу общее оценочное время выемки грунта для отдельной заданной трассы земляных работ может быть получено суммированием всех отдельных параметров времени выемки грунта от T1 до TN.
Данные разведочного профиля на фиг. 11, связанные с геологическим профилем 368 GP4 между пунктами земляных работ L3 и L4, показывают разрыв кривой. Данные профиля производительности на фиг. 12, соответствующие этому участку заданной трассы земляных работ, показывают соответствующий разрыв в оценке скорости земляных работ, которая показана стремящейся к нулю. Данные для этого участка части заданной трассы земляных работ показывают существование крайне крепкой породы или, что более вероятно, искусственных препятствий, таких как, например, бетонный или стальной трубопровод. В этом случае могут быть санкционированы дополнительные исследования и разведка определенного района, которые могут потребовать удаления препятствия или изменения ранее заданной трассы земляных работ.
Более реалистичный геологический профиль для определенного отрезка заданной трассы земляных работ приведен как геологический профиль 370 GP4 между пунктами земляных работ L4 и L5. Параметр трудности земляных работ для этого геологического профиля дает в итоге усредненный параметр D5. Соответственно, усредненная скорость земляных работ R5 может соответствовать выемке этой части заданной трассы. Альтернативно, скорость земляных работ, связанная с профилем 380 PP5 производительности, может быть сглажена блоком 255 управления экскаватором, чтобы оптимизировать скорость земляных работ, исходя из таких флуктуаций их трудности. Понятно, что способность экскаватора реагировать на такие флуктуации скорости земляных работ обычно ограничена различными механическими и эксплуатационными причинами.
Обратимся теперь к фиг. 13, на которой показана разнородная
композиция грунтов различных типов по заранее заданной трассе земляных работ, имеющей определенную длину L5. Например, грунт в области 1 имеет геологический профиль GP1 и соответствующий профиль геологического фильтра GF1. Каждый из грунтов других типов, показанных на фиг. 13, имеет соответствующее значение геологического профиля и профиля геологического фильтра. Предполагается, что база 330 данных геологического фильтра содержит данные геологического фильтра для каждой из областей 1, 2, 3 и 4, показанных на фиг. 13. Значительное преимущество нового способа обнаружения препятствий, реализуемого блоком 256 сбора геофизических данных, касается способности быстро обнаруживать существование неизвестной подземной структуры 401. Программа 320 корреляции и оптимизации, выполняемая главным блоком управления, в предпочтительном случае отфильтровывает известную геологию, используя соответствующий известный профиль геологического фильтра для исключения данных известной или проверенной геологии из данных, относящихся к сканируемому изображению. Отфильтровывание или исключение данных известной или проверенной геологии дает в результате отображение только непроверенных подземных структур 401. При исключении данных известной геологии из данных сканирования становятся ясно различимыми неизвестные или подозрительные подземные структуры.
Обратимся теперь к фиг. 14, на которой показана конфигурация обычной антенны, предназначенной для использования в радиолокационной системе зондирования грунта. Как правило, одноосевая антенна, такая как показанная антенна 382, которая ориентирована по оси Z, используется для выполнения нескольких проходов 384 съемки при попытке определить местоположение возможного подземного препятствия 386. Обычно радиолокационная система зондирования грунта имеет функцию измерения времени, которая позволяет измерять время, необходимое сигналу, чтобы распространиться из передатчика, отразиться от цели и вернуться к приемнику. Эта функция измерения времени может калиброваться по скорости в условиях конкретной подповерхностной области, с тем чтобы измерить расстояние до подповерхностного объекта или горизонта. Расчеты могут использоваться для преобразования этого значения времени в результат измерения расстояния, которое представляет глубину цели на основании определяемых в полевых условиях свойств грунта, таких как диэлектрическая постоянная и скорость распространения волн в определенном типе грунта. Упрощенный способ, который может использоваться при калибровке радиолокационной системы зондирования грунта для измерения глубины, включает взятие керновой пробы образцовой цели, измерение ее глубины и установление связи с числом наносекунд, которое необходимо волне для прохождения.
После того как благодаря функции времени радиолокационная система зондирования грунта снабдит оператора глубинной информацией, радиолокационная система перемещается вбок в горизонтальном (X) направлении, тем самым делая возможным построение двумерного профиля подповерхностной области. При выполнении нескольких проходов съемки над определенным участком в виде ряда параллельных линий 384 может быть обнаружено закопанное препятствие 386. Однако можно понять, что двумерное изображение при обычной антенной конфигурации 382 может привести к пропуску закопанного препятствия 386, в частности, когда препятствие 386 расположено параллельно направлению проходов 384 съемки.
Новая антенная конфигурация для отображения геологической информации обеспечивает значительное преимущество получения трехмерного отображения подповерхностной области, как показано на фиг. 15. Пара антенн 388 и 390 предпочтительно используется для трехмерного отображения подземного препятствия 386. Важно отметить, что характеристическое гиперболическое распределение данных время - местоположение, показанное на фиг. 6 для случая использования одноосевой антенны в двумерном виде, может быть вместо этого отображено как трехмерная гиперболическая поверхность, которая дает размеры обнаруженного закопанного препятствия 386 по ширине, длине и высоте. Следует также отметить, что зарытое в землю препятствие 386, такое как дренажный трубопровод, который проходит параллельно пути 392 съемки, будет немедленно обнаружено радиолокационной системой 382 зондирования грунта с трехмерным отображением. В предпочтительном случае в антенной системе 284 блока 258 отображения геологической информации используются соответствующие пары ортогонально ориентированных передающих и приемных антенн.
Нанесение на карту участка земляных работ
Обратимся теперь к фиг. 16, на которой показан экскаватор 410, выполняющий операцию выемки земли вдоль городской улицы 420 сети 422 городских улиц. Важное преимущество нового блока 254 определения географического положения экскаватора 410 касается способности точно вести экскаватор по заданной трассе земляных работ, такой как городская улица 420, и точно наносить трассу земляных работ на карту в базе 294 данных для отображения трассы на карте, связанной с блоком 254 определения географического положения. Часто может быть желательным сначала обследовать сеть 422 городских улиц с целью точного установления трассы земляных работ для каждой из подходящих городских улиц 420, например, входящих в состав сети 422 городских улиц. Эти данные в предпочтительном случае загружаются в навигационный контроллер 292 блока 254 определения географического положения.
Когда экскаватор 410 продвигается вперед по трассе земляных работ, определяемой для каждой из городских улиц 420, данные о действительном местоположении собираются блоком 254 определения географического положения и хранятся в базе 294 данных для отображения трассы на карте. После завершения выемки грунта данные, хранящиеся в базе 294 данных, загружаются в персональный компьютер 252 для составления "построенной" карты земляных работ для сети 422 городских улиц.
Таким образом, точная карта съемки коммунальных и, других трубопроводов, проложенных вдоль трассы земляных работ, может быть построена по данным нанесенных на карту трасс и впоследствии использоваться для справок теми, кому необходимо получить доступ к зарытым в землю трубопроводам или обойти их. Необходимо понимать, что земляные работы на одной или нескольких улицах с целью прокладки коммунальных трубопроводов, как показано на фиг. 16, представлены только с целью пояснения и не ограничивают возможностей определения географического местоположения и нанесения трассы на карту в новой системе сбора данных и управления экскаватором.
Как показано на фиг. 16, точная навигация экскаватора и нанесение на карту заданной трассы земляных работ может осуществляться глобальной радионавигационной системой 296, радиолокационной системой 298 определения расстояния или ультразвуковой системой 300 определения местоположения, как было описано выше со ссылкой на фиг. 7. Система сбора данных и управления для экскаватора, использующая конфигурацию глобальной радионавигационной системы 296, в предпочтительном случае содержит первый и второй транспондеры 404 и 408, используемые вместе с одним или несколькими сигналами глобальной радионавигационной системы 296, принимаемыми от соответствующего числа ее спутников 302. Подвижный транспондер 402, предпочтительно установленный на экскаваторе 410, предусматривается для приема сигнала 412 спутника глобальной радионавигационной системы и сигналов 414 и 418 базовых транспондеров, соответственно передаваемых базовыми транспондерами 404 и 408. Как было рассмотрено выше, для улучшения точности определения местоположения до 0,3 м и точнее может быть использован модифицированный разностный метод определения местоположения с помощью глобальной радионавигационной системы.
В другой форме осуществления изобретения наземная радиолокационная дальномерная система 298 содержит три базовых транспондера 404, 408, 406 и подвижный транспондер 402, установленный на экскаваторе 410. Следует обратить внимание на то, что третий наземный транспондер 406 может быть предусмотрен в качестве резервного транспондера для системы, использующей сигнал 412 спутника глобальной радионавигационной системы, в случаях, когда передача сигнала 412 спутника глобальной радионавигационной системы временно прерывается. Данные о местоположении предпочтительно обрабатываются и хранятся в блоке 254 определения географического положения, использующего три опорных сигнала 414, 416 и 418, принимаемых от трех наземных базовых транспондеров 404, 406 и 408. Форма осуществления изобретения, использующая ультразвуковую систему 300 определения местоположения, также будет использовать три базовых транспондера 404, 406 и 408 вместе с подвижным транспондером 402, установленным на экскаваторе 410.
Способ сбора данных и управления для экскаватора
Обратимся теперь к фиг. 17-20, на которых в виде блок-схемы алгоритма поясняются операции обобщенного способа работы, связанного с новой системой и способом сбора данных и управления для экскаватора. В исходном положении, как показано на фиг. 17, на шаге 500 несколько наземных транспондеров размещаются в подходящих пунктах вдоль заданной трассы земляных работ. Затем на шаге 502 блок 256 сбора геофизических данных (блок СГД) и блок 254 определения географического местоположения (блок ОГМ) располагаются в исходном пункте L0 трассы земляных работ. Далее блок 258 отображения геологии, блок 260 определения геофизических характеристик и блок 254 определения географического местоположения инициализируются или калибруются на шаге 504. После инициализации блок 256 сбора геофизических данных и блок 254 определения географического местоположения транспортируют по трассе земляных работ. Во время этой транспортировки на шагах 506, 508 и 510 собирают данные радиолокационной системы зондирования грунта, данные местоположения и геофизические данные. Данные, собираемые радиолокационной системой 282 зондирования грунта, предпочтительно преобразуются в цифровую форму и квантуются на шаге 512. Сбор данных продолжается на шаге 516 до тех пор, пока не будет достигнут конец трассы земляных работ, чему соответствует шаг 518. Тогда собранные данные в предпочтительном случае загружаются в персональный компьютер (ПК) 252 или непосредственно в главный блок 250 управления.
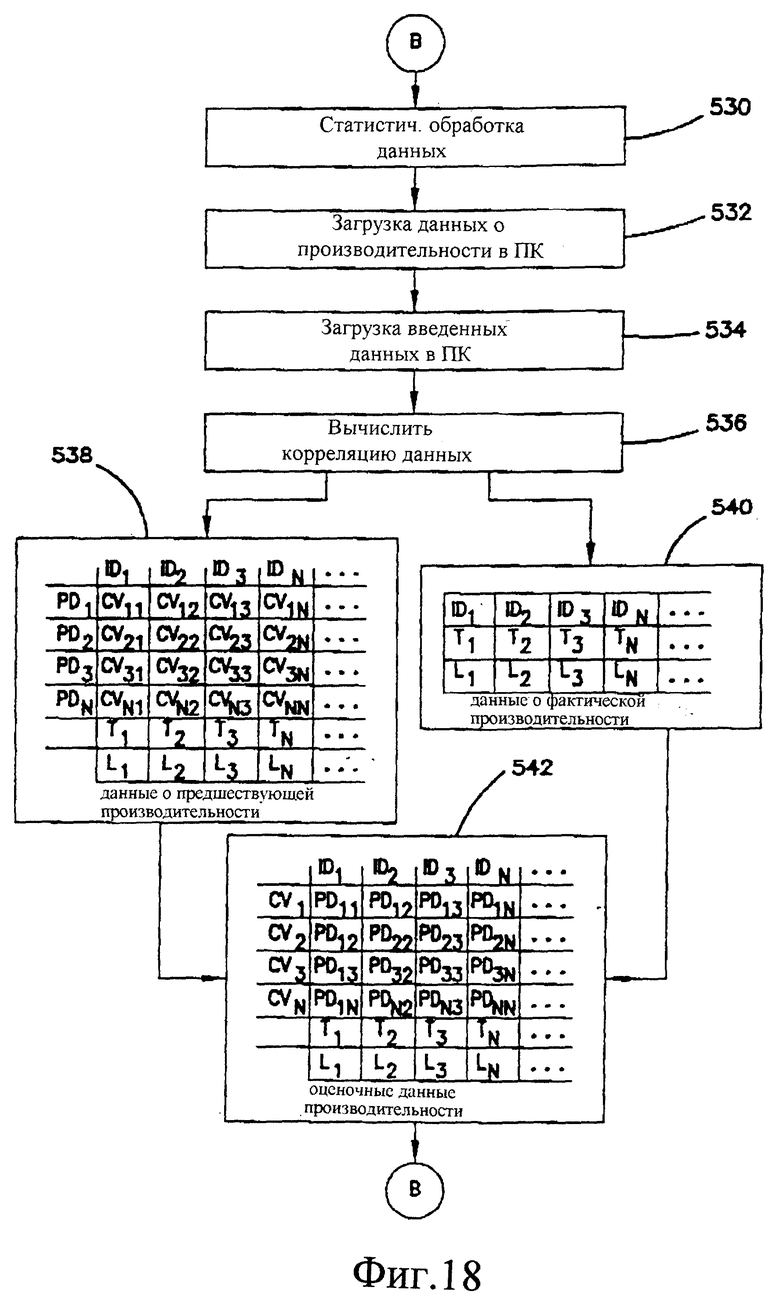
На шаге 530, показанном на фиг. 18, выполняется программа статистической обработки для земляных работ, в предпочтительном случае - для данных, собранных во время разведки трассы земляных работ. На шаге 532 данные о предшествующей производительности пересылаются из базы 316 данных статистики земляных работ в персональный компьютер 252. Данные, собранные во время разведки, также загружаются в персональный компьютер на шаге 534. Программа статистической обработки для земляных работ затем осуществляет корреляцию между данными, собранными радиолокационной системой зондирования грунта, и данными о предшествующей производительности экскаватора на шаге 536.
В одной форме осуществления изобретения корреляция между данными, собранными радиолокационной системой зондирования грунта, и данными о предшествующей производительности экскаватора выполняется с использованием различных известных методов операций над матрицами. Матрица данных о предшествующей производительности в предпочтительном случае создается на шаге 538 путем корреляции данных, отображающих геологию, (Idx) с соответствующими данными производительности экскаватора (PDx). Значение корреляции (CVxx) формируется в соответствии с каждой парой параметров данных, отображающих геологию, и данных производительности. Например, значение корреляции CV22 является значением корреляции, связанным со статистической корреляцией между параметром ID2 данных, отображающих геологию, и параметром PD2 данных производительности экскаватора. С каждым параметром данных, отображающих геологию, связаны соответствующие параметр времени и параметр местоположения, такие как параметры T1 и L1, связанные с параметром ID1 данных, отображающих геологию. Можно видеть, что значения корреляции, связанные с множеством пар параметров данных, отображающих геологию, и данных производительности, могут быть получены для приращений времени и местоположения по заданной трассе земляных работ.
На шаге 540 реальные данные, отображающие геологию, собираются по трассе земляных работ и в предпочтительном случае обрабатываются как матрица дискретных данных, отображающих геологию, для соответствующих дискретных приращений времени и расстояния. На шаге 542 над полученными на шагах 538 и 540 матрицами выполняются операции, чтобы образовать корреляционную матрицу, в которой параметр данных оценочной или предполагаемой производительности (PDxx) связан с парой соответствующих реальных данных, отображающих геологию, (IDx) и парами параметров значения корреляции (CVx). Например, параметр PD3 данных оценочной производительности связан с параметром ID3 данных, отображающих геологию, и параметром CV3 значения корреляции. Следует отметит, что каждый параметр данных оценочной производительности связан с соответствующим приращением времени и расстояния.
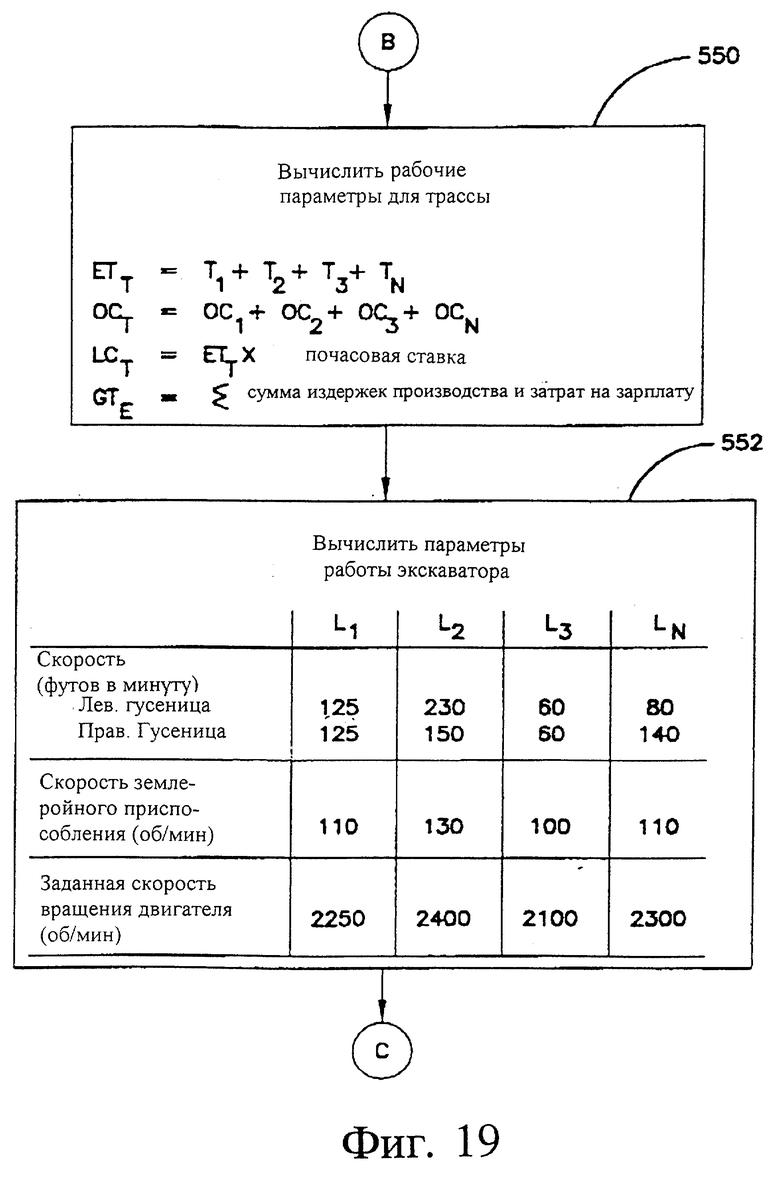
Оценочные параметры производительности для отдельной трассы земляных работ вычисляются на шаге 550, как показано на фиг. 19. Общее оценочное время (ETT) выкапывания всей трассы может быть вычислено суммированием дискретных приращений времени от T1 до TN. Издержки производства, связанные с выкапыванием заданной трассы земляных работ, могут быть определены суммированием издержек производства, связанных с каждой дискретной частью трассы. Оценочные затраты на зарплату (LCT) могут быть рассчитаны умножением общего оценочного времени (ETT) выкапывания на общую почасовую стоимость рабочей силы. Оценка общей суммы затрат (GTE) может быть определена суммированием всех издержек производства и расходов на зарплату, связанных с выкапыванием всей трассы.
На шаге 552 вычисляются оценочные параметры работы экскаватора. Например, для части трассы земляных работ между опорными пунктами L0 и L1 оценочные данные производительности могут указывать оптимальную скорость левой гусеницы (VL) 38,1 м/мин и скорость правой гусеницы (VR) 38,1 м/мин. Кроме того, оценочные данные производительности могут предлагать оптимальную скорость землеройного приспособления около 110 об/мин и заданную скорость вращения двигателя 2250 об/мин. Следует отметить, что скорости левой и правой гусениц VL и VR, равные 38,1 м/мин, соответствуют движению экскаватора по прямой по трассе земляных работ.
Можно видеть, что приведенные оценочные параметры на участке трассы земляных работ между пунктами L1 и L2 указывают на то, что экскаватор движется, поворачиваясь вправо, так как скорость левой гусеницы VL = 70,1 м/мин больше, чем правой гусеницы VR = 45,7 м/мин. Они также указывают на то, что скорость землеройного приспособления увеличивается до 130 об/мин и что заданная скорость вращения двигателя повышается до 2400 об/мин, показывая таким образом наличие сравнительно мягкого грунта в пределах области между пунктами L1 и L2. Эти параметры показывают, что на участке трассы земляных работ между пунктами L2 и L3 экскаватор снова движется в прямом направлении со сравнительно низкой скоростью 18,3 м/мин и тем самым указывают на присутствие сравнительно твердого подповерхностного грунта. Соответствующие более низкие скорость землеройного приспособления 100 об/мин и заданная скорость вращения двигателя 2100 об/мин указаны вследствие более низкой скорости экскаватора.
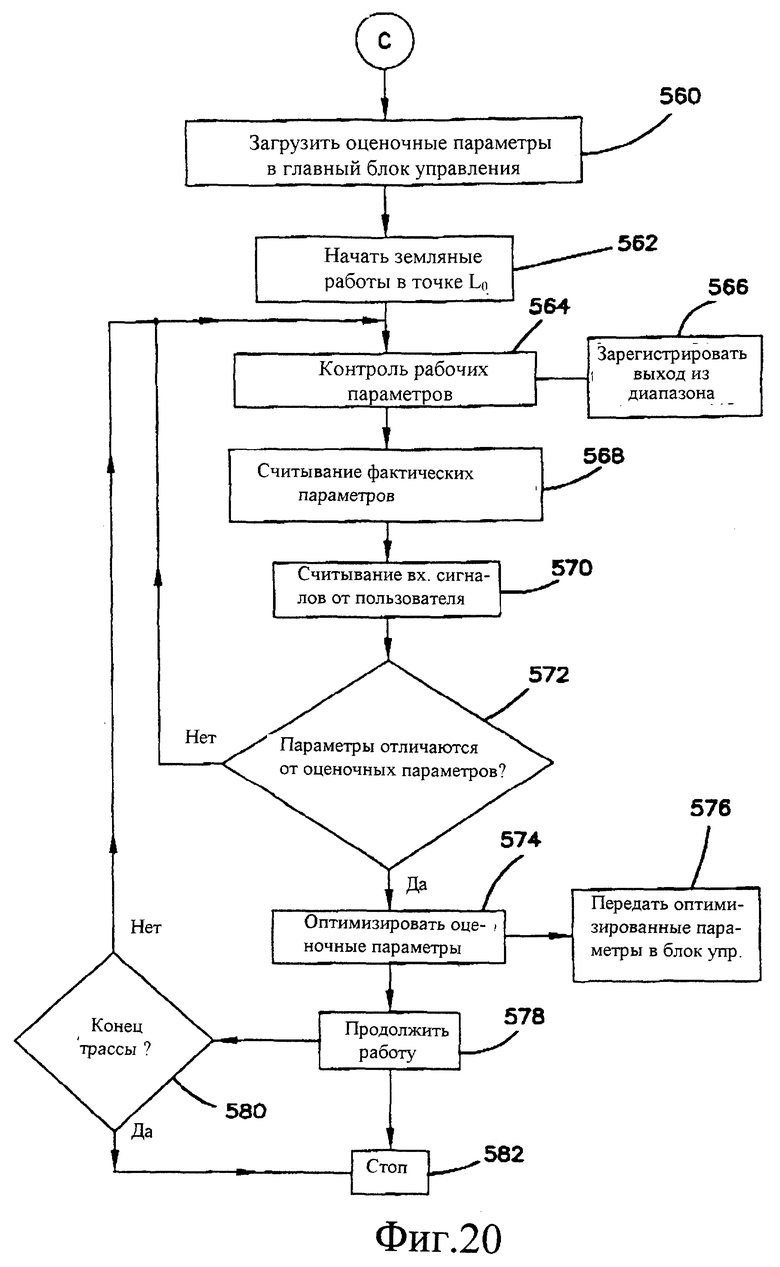
На шаге 560, как показано на фиг. 20, оценочные параметры землеройных работ, полученные на шаге 552, загружаются в главный блок 250 управления. Выемка земли начинается в опорном пункте L0 на шаге 562. На шаге 564 главный блок 250 управления контролирует параметры работы экскаватора, а режимы, выходящие за допустимый диапазон, записываются в запоминающее устройство 314 журнала технического обслуживания. Фактические параметры производительности собираются блоком 255 управления экскаватором на шаге 568 и пересылаются в главный блок 250 управления. Все входные сигналы, получаемые от главного пользовательского интерфейса 101, также пересылаются в главный блок управления на шаге 570. Если на шаге 572 установлено, что фактические параметры производительности, принятые от блока 255 управления экскаватором, отличаются на заданную величину от оценочных параметров землеройных работ, то главный блок 250 управления оптимизирует оценочные параметры на шаге 574 и передает оптимизированные параметры в блок 255 управления экскаватором для выполнения необходимых изменений в работе экскаватора на шаге 576. Землеройные работы продолжаются на шаге 578 до тех пор, пока конечный пункт заданной трассы земляных работ не будет достигнут на шаге 580, после чего работа по выемке земли завершается на шаге 582.
Очевидно, что различные изменения могут быть сделаны в рассмотренной выше предпочтительной форме осуществления изобретения в пределах его сущности и объема. Соответственно, объем настоящего изобретения не ограничивается рассмотренными выше отдельными формами осуществления, а определяется только приводимой ниже формулой изобретения и эквивалентами описанных форм осуществления изобретения.
Изобретение относится к вычислительной технике и землеройной технике и предназначено для сбора геологических данных и данных о местоположении, а также для управления землеройной машиной. Техническим результатом является повышение эффективности земляных работ и повышение точности оценки стоимости земляных работ за счет сбора и обработки геологической и геофизической информации. Для этого система сбора содержит блок сбора геофизических данных, блок управления машиной и главный блок управления машиной. Способ заключается в том, что определяют характеристики подповерхностной геологии заранее заданной трассы с помощью системы сбора геологической информации и изменяют режим работы машины в ответ на полученную информацию при прохождении землеройного органа по заданной трассе. 2 с. и 10 з.п.ф-лы, 20 ил.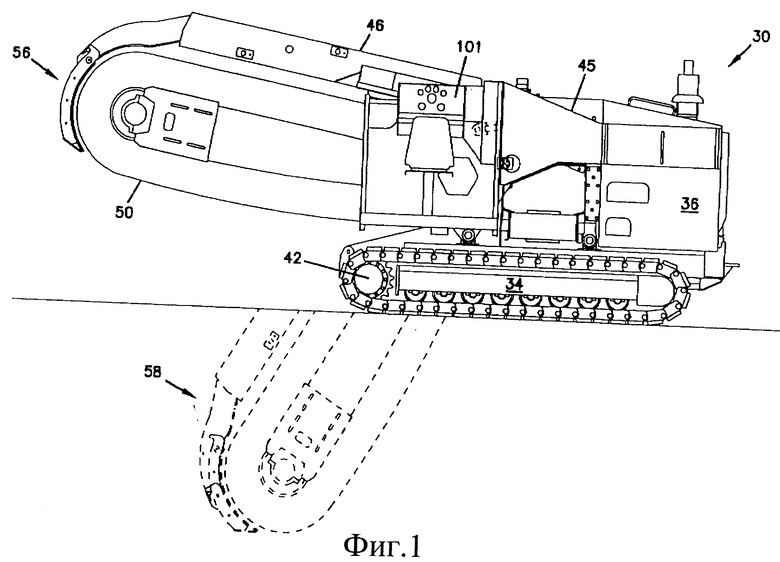
| 0 |
|
SU158495A1 | |
| US 3472372 A, 14.10.1969 | |||
| ВУЛЬ Ю.Я | |||
| и др | |||
| Наладка электроприводов экскаваторов | |||
| - М.: Недра, 1969, с.3-6, 36, 108-113 | |||
| Оптико-электронный датчик поперечного смещения землеройной машины | 1988 |
|
SU1702342A1 |
| Устройство для управления транспортным средством | 1989 |
|
SU1654784A1 |
| Пюпитр для работы на пишущих машинах | 1922 |
|
SU86A1 |
| ПРОТЕКТОР ДЛЯ БУРИЛЬНОЙ ТРУБЫ С ПРИВАРНЫМИ ЗАМКАМИ И СПОСОБ ЕГО МОНТАЖА | 2001 |
|
RU2208123C2 |

