Настоящее изобретение относится в целом к области землеройных машин, а более конкретно, к системе и способу управления гусеничным траншейным экскаватором и для сообщения оператору информации о состоянии гусеничного траншейного экскаватора во время работы.
Предшествующий уровень техники
Гусеничная траншейная экскаваторная машина, изображенная на фиг.1 и 2, обычно содержит двигатель 36, соединенный с приводом 32 правой гусеницы и приводом 34 левой гусеницы, которые вместе составляют тракторную часть 45 в гусеничном траншейном экскаваторе 30. Устройство 46, обычно установленное на передней части трактора 45, осуществляет специальные операции рытья.
Для рытья относительно больших траншей с приемлемой скоростью часто используют многоковшовую лопату 50. В транспортном положении 56, когда траншейный экскаватор маневрирует в рабочей зоне, многоковшовая лопата 50 обычно поднята над землей. Во время рытья многоковшовая лопата 50 опускается, углубляется в грунт и, находясь в положении 58 рытья, выкапывает траншею желаемой глубины с желаемой скоростью. Другое известное устройство для рытья траншей, изображенное на фиг. 3, называется фрезерной лопатой, а управление им осуществляется аналогично управлению многоковшовой лопатой 50.
Согласно известному способу управления гусеничным траншейным экскаватором 30 для того, чтобы управлять его работой эффективно и безопасно, оператору приходится манипулировать различными рычагами, переключателями и кнопками. Оператор должен иметь высокую квалификацию, он должен постоянно контролировать и регулировать поступательное движение и поворот тракторной части 45, а также работу землеройного устройства 46 при движении экскаватора 30 в режиме рытья и в транспортном режиме. Обеспечение оптимальной работы гусеничного траншейного экскаватора в известных способах управления поступательным движением и поворотом как в режиме рытья, так и в транспортном режиме обычно связано со сложными и утомительными операциями.
На фиг. 4 показана обычная панель 62 управления гусеничного траншейного экскаватора 30. Управление поступательным движением и поворотом гусеничного траншейного экскаватора 30 обычно осуществляется с помощью манипуляции рычагами 64 и 66, которые управляют работой приводов 34 и 32 левой и правой гусениц соответственно. Перемещение рычага 66 привода правой гусеницы, например вперед, заставляет привод 32 правой гусеницы работать в прямом направлении и, в зависимости от относительной скорости привода 34 левой гусеницы, поворачивать экскаватор направо или налево. Реверс привода 32 правой гусеницы обычно осуществляют путем перемещения рычага 66 привода правой гусеницы назад, в результате чего привод 32 правой гусеницы работает в обратном направлении.
Управление приводом 34 левой гусеницы осуществляют по существу аналогично описанному выше способу управления приводом 32 правой гусеницы. Таким образом, управление как поступательным движением, так и поворотом экскаватора осуществляется с помощью известных рычагов 64 и 66 управления гусеницами. Кроме того, управление поступательным движением и поворотом привода 32 правой гусеницы является полностью независимым от управления приводом 34 левой гусеницы.
Часто желательно обеспечить работу двигателя 36 в режиме рытья с постоянной оптимальной мощностью, что в свою очередь позволяет землеройному устройству 46 работать с максимальной производительностью. Известная панель управления, изображенная на фиг.4, содержит несколько органов управления и переключателей, в том числе переключатель 74 диапазона скорости, кнопку 76 регулятора числа оборотов в минуту, кнопку 78 подстройки поворота и кнопку 80 подстройки тяги. Все эти переключатели и кнопки используют для поддержания двигателя в заданном режиме по мощности при переменной нагрузке на землеройное устройство 46 в процессе рытья и для поворота экскаватора 30 в заданном направлении. Кроме того, как правило, требуется многократно регулировать потенциометры 84 и 82 правого и левого насосов для уравнивания их рабочих характеристик.
Переключатель 74 диапазона скорости имеет, например, три положения, соответствующие низкой, средней и высокой скорости. Установка конкретного диапазона скорости во время рытья обычно определяется несколькими факторами, включающими желаемую скорость рытья и тип вынимаемого грунта. Обычно при проходке более мягкого грунта переключатель 74 диапазона скорости устанавливают в позицию высокой скорости, в результате чего экскаватор будет работать с более высокой скоростью благодаря относительно меньшему уровню нагрузки на землеройное устройство 46. При встрече с более плотным грунтом, например бетоном, нагрузка на землеройное устройство 46, которое приводится в действие двигателем 36, возрастает, что приводит к соответствующему уменьшению скорости экскаватора 30.
Оператор должен быстро реагировать на изменение такой нагрузки двигателя 36, определяя вначале, какой переключатель нужно регулировать, а затем степень регулировки переключателя. Обычно небольшое изменение тяги осуществляется с помощью кнопки 80 подстройки тяги. Среднее изменение уровня тяги гусеничного траншейного экскаватора 30 обычно осуществляют переключением переключателя 74 диапазона скорости из положения, соответствующего высокой скорости, в положение, соответствующее либо средней, либо низкой скорости, а затем снова регулируют кнопку 80 подстройки тяги и кнопку 76 регулятора числа оборотов в минуту для того, чтобы избежать остановки двигателя 36.
Типичный траншейный экскаватор содержит один или несколько датчиков, которые контролируют различные физические параметры машины. Информация, собираемая с датчиков, обычно используется для изменения конкретных функций машины или для выдачи оператору информации, обычно с помощью преобразования сигнала датчика и передачи его в одно или несколько аналоговых устройств отображения, например, на тахометр 72. Информация, переданная оператору с использованием множества аналоговых устройств отображения, обычно должна быть быстро обработана квалифицированным оператором, чтобы последний мог оценить, происходит ли работа экскаватора в приемлемом режиме и в рамках безопасности.
Изготовители гусеничных траншейных экскаваторов стремятся свести к минимуму трудности управлением экскаватором как в транспортном режиме, так и в особенности в режиме рытья. Кроме того, желательно сократить время, требуемое для обучения оператора экскаватора, по сравнению с тем, которое требуется для этого сейчас. Кроме того, в области изготовления экскаваторного оборудования все еще существует остро ощущаемая необходимость обеспечить оператора в процессе рытья оперативной, диагностической и касающейся безопасности информацией. Настоящее изобретение решает все эти задачи.
Сущность изобретения
Настоящее изобретение представляет собой систему и способ управления поступательным движением и поворотом гусеничного траншейного экскаватора, содержащего несколько органов управления поступательным движением и поворотом, которые функционируют в нескольких режимах работы в соответствии с выбором одного из нескольких режимов движения экскаватора. Кроме того, изобретение предусматривает средства для селективной передачи оператору экскаватора множества оперативных сообщений о рабочем состоянии экскаватора.
Краткое описание чертежей
На фиг.1 изображен вид сбоку гусеничного траншейного экскаватора, включающего устройство для рытья в виде многоковшовой лопаты,
на фиг.2 изображен обобщенный вид сверху гусеничного траншейного экскаватора.
на фиг. 3 изображен вид сбоку гусеничного траншейного экскаватора с установленным на нем устройством для рытья в виде фрезерной лопаты.
на фиг. 4 изображена известная панель управления гусеничным траншейным экскаватором,
на фиг.5 показана часть известной панели управления с рычагами и органами управления, необходимыми для управления известным гусеничным траншейным экскаватором,
на фиг.6 показана часть новой панели управления гусеничного траншейного экскаватора, содержащей новые органы многорежимного управления поступательным движением и поворотом,
на фиг.7 показана вся панель управления гусеничного траншейного экскаватора, содержащая органы многорежимного управления поступательным движением и поворотом и дисплей,
на фиг.8 иллюстрируется многорежимное управление поступательным движением и соответствующие функции при работе гусеничного траншейного экскаватора в режиме рытья и в транспортном режиме,
на фиг.9 изображен график зависимости уровня выходного параметра приводов левой и правой гусениц экскаватора от выходного сигнала органа управления поступательным движением в случае, когда переключатель диапазонов скорости установлен в положение, соответствующее высокой скорости,
на фиг.10 изображен график зависимости уровня выходного параметра приводов левой и правой гусениц экскаватора от выходного сигнала органа управления поступательным движением в случае, когда переключатель диапазонов скорости установлен в положение, соответствующее низкой скорости,
на фиг. 11 изображен график, иллюстрирующий рабочий диапазон заданных уровней выходного параметра двигателя, связанный с частичной повторной калибровкой в процессе рытья,
на фиг.12 показано известное устройство для управления поворотом, содержащее независимые рычаги управления левой и правой гусеницами,
на фиг. 13 графически иллюстрируется новое многорежимное управление поворотом в транспортном режиме и в режиме рытья,
на фиг. 14 изображен график, иллюстрирующий характеристики управления поворотом для приводов левой и правой гусениц экскаватора, работающего в режиме рытья, при использовании нового органа многорежимного управления поворотом,
на фиг. 15 изображен график, иллюстрирующий характеристики управления поворотом для приводов левой и правой гусениц экскаватора, работающего в транспортном режиме, при использовании нового органа многорежимного управления поворотом,
на фиг. 16 графически иллюстрируются интуитивно понятные операции по управлению поворотом экскаватора с помощью нового органа многорежимного управления поворотом,
на фиг. 17 изображена блок-схема компьютерной системы для управления поступательным движением и поворотом экскаватора, имеющего органы многорежимного управления поступательным движением и поворотом,
на фиг.18 показаны примеры различных сообщений о состоянии экскаватора и отказах, передаваемых оператору гусеничного траншейного экскаватора с помощью дисплея,
на фиг. 19 показан новый орган многорежимного управления дросселем,
на фиг. 20 показана альтернативная конфигурация нового органа многорежимного управления поворотом,
на фиг.21 иллюстрируется первая часть процесса управления для изменения движущей силы приводов гусениц в ответ на сигналы управления поступательным движением при транспортировании, выдаваемые новым органом многорежимного управления поступательным движением,
на фиг.22 иллюстрируется вторая часть процесса управления для изменения движущей силы приводов гусениц в ответ на сигналы управления поступательным движением при транспортировании, выдаваемые новым органом многорежимного управления поступательным движением,
на фиг.23 иллюстрируется первая часть процесса управления для изменения движущей силы приводов гусениц в ответ на сигналы управления поступательным движением при рытье, выдаваемые новым органом многорежимного управления поступательным движением.
на фиг.24 иллюстрируется вторая часть процесса управления для изменения движущей силы приводов гусениц в ответ на сигналы управления поступательным движением при рытье, выдаваемые новым органом многорежимного управления поступательным движением,
на фиг.25 иллюстрируется первая часть процесса управления поворотом гусеничного траншейного экскаватора, работающего в транспортном режиме, в ответ на сигналы управления поворотом, выдаваемые новым органом многорежимного управления поворотом,
на фиг. 26 иллюстрируется вторая часть процесса управления поворотом гусеничного траншейного экскаватора, работающего в транспортном режиме, в ответ на сигналы управления поворотом, выдаваемые новым органом многорежимного управления поворотом,
на фиг.27 иллюстрируется третья часть процесса управления поворотом гусеничного траншейного экскаватора, работающего в транспортном режиме, в ответ на сигналы управления поворотом, выдаваемые новым органом многорежимного управления поворотом,
на фиг. 28 иллюстрируется четвертая часть процесса управления поворотом гусеничного траншейного экскаватора, работающего в транспортном режиме, в ответ на сигналы управления поворотом, выдаваемые новым органом многорежимного управления поворотом,
на фиг. 29 иллюстрируется пятая часть процесса управления поворотом гусеничного траншейного экскаватора, работающего в транспортном режиме, в ответ на сигналы управления поворотом, выдаваемые новым органом многорежимного управления поворотом,
на фиг.30 иллюстрируется шестая часть процесса управления поворотом гусеничного траншейного экскаватора, работающего в транспортном режиме, в ответ на сигналы управления поворотом, выдаваемые новым органом многорежимного управления поворотом,
на фиг.31 иллюстрируется первая часть процесса управления поворотом гусеничного траншейного экскаватора, работающего в режиме рытья, в ответ на сигналы управления поворотом, выдаваемые новым органом многорежимного управления поворотом, и
на фиг.32 иллюстрируется вторая часть процесса управления поворотом гусеничного траншейного экскаватора, работающего в режиме рытья, в ответ на сигналы управления поворотом, выдаваемые новым органом многорежимного управления поворотом.
Подробное описание предпочтительных вариантов выполнения изобретения
Как отмечено выше, настоящее изобретение относится к системе и способу управления поступательным движением и поворотом гусеничного траншейного экскаватора и предоставления оператору информации о его рабочем состоянии. В настоящей заявке для того, чтобы дать полное представление о различных функциях и работе системы, целиком описываются система и способ для управления поступательным движением и поворотом гусеничного траншейного экскаватора и предоставления оператору информации о его рабочем состоянии. При этом некоторые признаки и функции системы управления поступательным движением и поворотом экскаватора не являются предметом настоящего изобретения, но являются предметом заявок, которые рассматриваются одновременно с настоящей. Описание этих признаков и функций включено в настоящую заявку для полноты и облегчения понимания предлагаемой системы управления экскаватором.
На фиг.6 изображена панель 101 управления, содержащая новые органы 90 и 92 многорежимного управления поступательным движением и поворотом гусеничного траншейного экскаватора 30. В одном варианте выполнения изобретения для эффективного управления поступательным движением и поворотом экскаватора в одном из нескольких режимов движения орган 90 управления поступательным движением, орган 92 управления поворотом и орган 94 выбора режима движения действуют совместно. Орган 90 управления поступательным движением и орган 92 управления поворотом предпочтительно являются органами многорежимного управления, т.е. каждый из органов 90 и 92 управления осуществляет несколько функций в зависимости от выбранного режима движения.
При сравнении новой панели управления, изображенной на фиг.6, с известной панелью управления, изображенной на фиг.5, легко видеть, что использование органов 90 и 92 многорежимного управления поступательным движением и поворотом существенно уменьшает количество управляющих рычагов, переключателей и кнопок подстройки, которые необходимы для управления экскаватором 30, использующим известную систему управления. Наиболее заметно отсутствие двух известных рычагов 64 и 66 приводов гусениц, а также тахометра 72, который обычно требуется для контроля влияния регулировок органов управления на выходной параметр двигателя 36. Кроме того, многие из функций, выполняемых переключателем 74 диапазона скоростей, кнопкой 76 регулятора числа оборотов в минуту, кнопкой 78 подстройки поворота и кнопкой 80 подстройки тяги на известной панели управления 62, показанной на фиг.5, либо исключены, либо объединены в функции, выполняемые органами 90 и 92 многорежимного управления поступательным движением и поворотом, показанными на фиг.6. Следует отметить, что известные рычаги 64 и 66 управления левой и правой гусеницами управляют как поступательным движением, так и поворотом экскаватора 30. Кроме того, следует отметить, что известный рычаг 64 управления левой гусеницей обычно управляет работой привода 34 левой гусеницы, а рычаг 66 управления правой гусеницей управляет работой привода 32 правой гусеницы. Поэтому управление приводом 34 левой гусеницы является полностью не зависимым от управления приводом 32 правой гусеницы.
Одним из важных преимуществ новой системы управления, показанной на фиг. 6 и 7, является эффективная развязка, или разделение функций управления поворотом экскаватора 30 от функций управления его поступательным движением. Управление движущей силой приводов 34 и 32 правой и левой гусениц осуществляется органом 90 управления поступательным движением, а управление поворотом экскаватора 30 осуществляется независимо с помощью органа 92 управления поворотом. Управление экскаватором 30 в одном из нескольких режимов движения существенно упрощается за счет использования органов 90 и 92 многорежимного управления поступательным движением и поворотом.
На фиг. 8 изображен орган 90 многорежимного управления поступательным движением экскаватора 30 в одном из нескольких режимов движения. Термин "многорежимный" означает, что конкретный орган управления обеспечивает выполнение нескольких различных функций в зависимости от выбранного режима работы. Поэтому множество задач управления, которые до этого осуществлялись оператором экскаватора 30 вручную, теперь осуществляются с помощью одного органа многорежимного управления, например, управление поступательным движением и поворотом, которое выполняется изображенными на фиг.8 органами 90 и 92, раньше осуществлялось путем манипуляции несколькими рычагами, переключателями и кнопками подстройки, как описано выше.
Орган 90 управления поступательным движением, изображенный на фиг.8, имеет нейтральное положение, крайнее положение, соответствующее движению вперед, крайнее положение, соответствующее движению назад, и широкий диапазон промежуточных положений. Только для иллюстрации, а не для того, чтобы ограничить объем изобретения, орган 90 многорежимного управления поступательным движением предпочтительно может работать в транспортном режиме и в режиме рытья. Следует понимать, что кроме транспортного режима и режима рытья могут иметься и другие режимы движения. Выбор транспортного режима или режима рытья предпочтительно определяется положением органа 94 выбора режима движения, который изменяет функции органа 90 управления поступательным движением.
В другом варианте выполнения изобретения исключен ручной выбор режима движения с помощью органа 94. Переход от транспортного режима к режиму рытья и наоборот может осуществляться в ответ на положение дросселя 206 двигателя 36. В варианте выполнения изобретения, изображенном на фиг.19, элемент 206 управления дросселем работает в транспортном режиме, если расположен между "минимальным" положением 232 и "максимальным" положением 234. Манипулирование элементом 206 управления дросселем в этом диапазоне интерпретируется компьютером 182 как выбор транспортного режима движения.
Перемещение элемента 206 управления дросселем в нейтральный диапазон 236 интерпретируется компьютером 182 как требование выйти из транспортного режима движения или режима движения с рытьем. Перемещение элемента 206 управления дросселем в диапазоне 238, соответствующем режиму рытья, вызывает переход от транспортного режима в режим рытья. Выход из режима рытья осуществляется перемещением элемента 206 управления дросселем из диапазона 238 режима рытья назад в нейтральный диапазон 236. Затем путем перемещения элемента 206 управления в "минимальное" положение 232 может быть выбран транспортный режим. Следует понимать, что конфигурация органа 206 управления дросселем, изображенная на фиг. 19, требует, чтобы оператор явно менял положение этого элемента при переходе между позициями одного режима в другой, тем самым уменьшая вероятность непреднамеренного выбора нежелательного режима движения.
В еще одном варианте выполнения изобретения дроссель 206 содержит датчик, связанный с двигателем 36 и контролирующий количество топлива, подаваемого в двигатель 36. Средства 204 управления подачей топлива предпочтительно содержат регулятор количества топлива, подаваемого в двигатель 36. Датчик дросселя может быть соединен с регулятором подачи топлива и сообщать информацию о состоянии регулятора подачи топлива в компьютер 182. Крайнее положение элемента 206 управления дросселем, определяемое установкой рычага 230 в максимальное положение, интерпретируется компьютером 182 как выбор режима рытья. Любое другое положение элемента 206 управления дросселем, отличное от максимального, интерпретируется компьютером 182 как выбор транспортного режима. Следует отметить, что элемент 206 управления дросселем, изображенный на фиг.19, не обязательно должен иметь отдельные диапазоны для транспортного режима и режима рытья. Может быть один диапазон для положений элемента 206 управления дросселем, причем в максимальном положении осуществляется переход от транспортного режима экскаватора 30 к режиму рытья и наоборот.
В еще одном альтернативном варианте выполнения изобретения основанием для определения того, какой из режимов - транспортный или рытья - выбран, является состояние землеройного устройства 46, определенное датчиком. Датчик 186 состояния землеройного устройства выдает сигнал, который указывает рабочее состояние этого устройства. Компьютер 182 интерпретирует работу землеройного устройства 46 как выбор режима движения с рытьем, а бездействие этого устройства 46 - как выбор транспортного режима движения.
В варианте выполнения изобретения, изображенном на фиг.8, работа гусеничного траншейного экскаватора 30 в транспортном режиме предпочтительно осуществляется с помощью установки органа 94 выбора режима движения в положение, соответствующее транспортному режиму. Движение экскаватора 30 вперед и назад зависит от положения органа 90 управления поступательным движением между крайними положениями 122 и 124. Орган 90 управления поступательным движением выдает сигнал поступательного движения при транспортировании, который предпочтительно пропорционален его перемещению в обоих направлениях относительно нейтрального положения 120. Сигнал поступательного движения при транспортировании предпочтительно характеризует заданную скорость двигателей гусениц, измеренную в оборотах в минуту.
Нейтральное положение 120 соответствует состоянию простоя, когда на приводы 34 и 32 левой и правой гусениц мощность не подается. Когда орган 90 управления поступательным движением перемещают в направлении, соответствующем движению вперед, пропорционально возрастающая мощность передается от двигателя 36 к двигателям 42 и 44 левой и правой гусениц. Диапазон 126 положений органа 90 управления поступательным движением, соответствующий движению вперед, находится между нейтральным положением 120 и крайним положением 122, в этом диапазоне мощность для движения вперед, подаваемая на двигатели 42 и 44 левой и правой гусениц, пропорциональна смещению органа 90 управления поступательным движением в диапазоне 126. Аналогично, диапазон 128 положений органа 90 управления поступательным движением, соответствующий движению назад, находится между нейтральным положением 120 и крайним положением 124. Мощность на двигатели 42 и 44 левой и правой гусениц для движения назад подается предпочтительно пропорционально смещению органа 90 управления поступательным движением в пределах диапазона 128 положений, соответствующих движению назад.
В еще одном варианте выполнения изобретения установка органа 94 выбора режима движения в положение, соответствующее режиму рытья, заставляет многорежимный орган 90 управления поступательным движением работать в режиме рытья. Управление экскаватором 30 в режиме рытья обычно начинается с того, что орган 90 управления поступательным движением устанавливают в нейтральное положение 110. Затем оператор перемещает орган 90 управления поступательным движением в крайнее переднее положение 112, т.е. в крайнее положение, соответствующее движению вперед. В этом крайнем переднем положении 112 орган 90 управления поступательным движением выдает сигнал поступательного движения при рытье, который предпочтительно соответствует заданному значению выходного параметра двигателя или скорости, измеренной в оборотах в минуту.
Как обсуждалось выше, обычно желательно, чтобы выходной параметр двигателя 36 в режиме рытья был постоянным, что в свою очередь, позволяет землеройному устройству 46 работать с оптимальной производительностью. Управление экскаватором 30 в процессе рытья с помощью органа 90 многорежимного управления поступательным движением, изображенного на фиг.8, по существу избавляет оператора от необходимости производить какие-либо дополнительные регулировки этого органа 90 управления для обеспечения работы двигателя 36 с заданным уровнем выходного параметра. Наоборот, в ответ на сигнал поступательного движения при рытье, выдаваемый органом 90 управления поступательным движением, установленным в крайнее переднее положение 112, компьютер 182, изображенный на фиг.17, автоматически изменяет уровень тяги двигателей 42 и 44 левой и правой гусениц для поддержания выходного параметра двигателя 36 на заданном уровне. Работа компьютера 182 подробно рассмотрена ниже.
При работе гусеничного траншейного экскаватора 30 может оказаться желательным изменить скорость рытья или, более конкретно, нагрузку на двигатель 36. Еще одно преимущество использования органа 90 многорежимного управления поступательным движением состоит в возможности изменять при работе экскаватора 30 фактическое или эффективное крайнее положение органа 90 управления поступательным движением, соответствующее движению вперед. Новое или скорректированное фактическое крайнее положение, соответствующее движению вперед, устанавливается перемещением органа 90 управления поступательным движением в это новое крайнее положение 116 после переключения переключателя 103 установки исходного положения, показанного на фиг.7. В результате установки нового или скорректированного крайнего переднего, соответствующего движению вперед положения 116 органа 90 управления поступательным движением он будет выдавать сигнал управления поступательным движением при рытье, соответствующий новому заданному уровню выходного параметра двигателя. После выбора нового крайнего переднего положения 116 переключатель 103 исходной установки можно вернуть в первоначальное положение и продолжить процесс рытья.
Новый или скорректированный заданный уровень выходного параметра двигателя может быть альтернативно установлен с помощью уникального интерфейса пользователя, выполненного как часть дисплея 100. Эффективная установка крайнего переднего положения 112 предпочтительно осуществляется выбором меню частичной повторной калибровки, вызванного на дисплей 100. Меню частичной повторной калибровки предпочтительно выбирают включением переключателя 99 выбора сообщения. Обычно оператор перемещает орган 90 управления поступательным движением из первоначального крайнего переднего положения 112 в нейтральное положение 120 и с помощью переключателя 99 выбора сообщения вызывает на дисплей 100 меню частичной повторной калибровки. Предпочтительно, чтобы в этом случае первоначальный заданный уровень выходного параметра двигателя отображался на дисплее 100. Переключение переключателя повторной калибровки (не показан) предпочтительно увеличивает или уменьшает величину заданного уровня выходного параметра двигателя до нового или скорректированного заданного уровня выходного параметра. Возврат переключателя повторной калибровки в первоначальное положение приводит к замене первоначального заданного уровня выходного параметра двигателя, хранимого в компьютере 182, на новый или скорректированный заданный уровень выходного параметра двигателя. Затем для того, чтобы двигатель работал с новым или скорректированным заданным уровнем выходного параметра, оператор может переместить орган 90 управления поступательным движением из нейтрального положения 120 в первоначальное крайнее переднее положение 112. Таким образом, крайнее переднее положение 112 эффективно корректируется во время частичной повторной калибровки, чтобы гусеничный траншейный экскаватор 30 работал с новым или скорректированным заданным уровнем выходного параметра двигателя в процессе рытья. В предпочтительном варианте выполнения изобретения оператор может выбрать новый или скорректированный заданный уровень выходного параметра двигателя, измеряемого в оборотах в минуту, то есть, на 100 об/мин больше или меньше первоначального заданного уровня, предпочтительно с шагом 25 об/мин.
В другом варианте выполнения изобретения заданный уровень выходного параметра двигателя при работе гусеничного траншейного экскаватора 30 в режиме рытья может быть изменен оперативно в процессе рытья. Зависимость между выходным сигналом органа 90 управления поступательным движением и заданным уровнем выходного параметра двигателя 36 дана на фиг. 11. Линия 134 нагрузки двигателя представляет собой спектр заданных уровней выходного параметра для конкретного двигателя экскаватора при работе в режиме рытья. При установке органа 90 управления поступательным движением в новое крайнее переднее положение 116 в процессе рытья этот орган 90 управления вырабатывает сигнал поступательного движения при рытье, с помощью которого происходит автоматическое изменение заданного уровня выходного параметра двигателя в соответствии с нагрузочной линией 134.
Предпочтительный заданный уровень выходного параметра двигателя обычно понимают как скорость, при которой двигатель 36 экскаватора 30 развивает максимальную мощность в лошадиных силах, однако могут быть приемлемы и другие уровни выходных параметров двигателя. В зависимости от конкретных характеристик двигателя экскаватора 30 диапазон оптимальных скоростей двигателя может различаться. На фиг. 11 для иллюстрации в качестве примера приведен типичный рабочий диапазон заданного уровня выходного параметра двигателя экскаватора 30.
Вернемся к нагрузочной линии 134. Двигатель 36 может эффективно работать, например, в интервале заданных уровней выходного параметра между 2100 об/мин и 2450 об/мин. Считается, что при 2100 об/мин нагрузка на двигатель 36 велика и двигатель развивает максимальную мощность в лошадиных силах и испытывает максимальную нагрузку. Считается, что при 2450 об/мин нагрузка на двигатель 36 минимальна, таким образом, развивается минимальная мощность в лошадиных силах по отношению к диапазону заданных рабочих значений об/мин. Ручное или оперативное регулирование заданного уровня выходного параметра двигателя до нового заданного уровня в ответ на сигнал поступательного движения при рытье, выдаваемый органом 90 управления поступательным движением, предпочтительно осуществляется установкой этого органа 90 управления в новое или измененное фактическое или эффективное крайнее переднее положение 116, находящееся между нейтральным положением 110 и первоначально установленным крайним передним положением 112. Как описано выше, в режиме рытья оператору экскаватора 30 нет необходимости делать какие-либо дополнительные регулировки органа 90 управления поступательным движением после выбора нового крайнего переднего положения.
Важным преимуществом управления экскаватором 30 с использованием органа 90 многорежимного управления поступательным движением является дополнительная функциональная возможность, которая обеспечивается органом 96 выбора диапазона скорости, предпочтительно имеющим положения "высокий" и "низкий". На фиг.9 и 10 изображены два графика предпочтительной зависимости между выходным сигналом органа 90 управления поступательным движением и скоростью приводов 34 и 32 левой и правой гусениц. График на фиг.9 изображает зависимость величины скорости приводов 34 и 32 левой и правой гусениц в футах в минуту от положения органа 90 управления поступательным движением, когда орган 96 выбора диапазона скорости установлен в положение "высокий". На фиг.10 дана аналогичная зависимость для случая, когда орган 96 выбора диапазона скорости установлен в положение "низкий".
Орган 90 управления поступательным движением предпочтительно выдает электрические сигналы в диапазоне от 0 до 5 вольт. Предпочтительно, чтобы сигнал величиной 2,5 В соответствовал нейтральному положению органа 90 управления поступательным движением, когда на двигатели 42 и 44 левой и правой гусениц энергия не подается. Движение вперед осуществляется при перемещении органа 90 управления поступательным движением в прямом направлении, в результате чего на двигатели 42 и 44 гусениц подается энергия для движения вперед. Как изображено на фиг. 9, выходной сигнал величиной 5 В от органа 90 управления поступательным движением обычно соответствует максимальной скорости привода гусениц в прямом направлении, а выходной сигнал величиной 0 В соответствует максимальной скорости привода гусениц в обратном направлении. В одном варианте выполнения изобретения максимальная скорость приводов гусениц в прямом и обратном направлениях составляет 270 фут/мин (80 м/мин) при установке органа 96 выбора диапазона скорости в положение "высокий" и 125 фут/мин (38 м/мин) - при установке его в положение "низкий". Альтернативно, экскаватор 30 может работать только в одном диапазоне скоростей. Ясно, что кроме "высокого" и "низкого" диапазонов скоростей для управления поступательным движением согласно изобретению могут быть использованы другие диапазоны скоростей.
Орган 92 многорежимного управления поворотом обеспечивает дополнительные преимущества при работе гусеничного траншейного экскаватора 30 в одном из нескольких режимов движения. Орган 92 управления поворотом, изображенный на фиг. 13, эффективно сочетает функции управления поворотом, осуществляемые двумя независимыми рычагами 64 и 66 управления гусеницами, кнопкой 78 подстройки поворота и потенциометрами 82 и 84 управления правым и левым насосами в известной системе управления, изображенной на фиг. 12. Поворот экскаватора 30 обычно осуществляется за счет того, что приводам 34 и 32 левой и правой гусениц придают разные скорости. Например, в известной системе управления поворотом левый поворот осуществляют, увеличивая скорость привода 32 правой гусеницы, при этом не изменяя или уменьшая скорость привода 34 левой гусеницы. Для того, чтобы в известной системе точно выполнить поворот, оператор экскаватора 30 должен изменять относительные скорости приводов 34 и 32 правой и левой гусениц путем постоянной регулировки положения правого и левого рычагов 64 и 66 управления гусеницами соответственно. Эта задача весьма сложна, поскольку известные рычаги 64 и 66 управления гусеницами управляют также тягой приводов 34 и 32 гусениц соответственно.
В отличие от известной системы, при многорежимном управлении поворотом один орган 92 управления поворотом осуществляет управление приводами 34 и 32 как левой, так и правой гусениц. Кроме того, манипулирование органом 92 управления поворотом является для оператора гусеничного траншейного экскаватора 30 более естественным или интуитивно понятным, как подробнее сказано при описании фиг.16.
Орган 92 многорежимного управления поворотом, изображенный на фиг. 13 и 20, может работать в нескольких режимах поворота, причем характеристики управления в конкретном режиме поворота предпочтительно можно изменять, выбирая один из нескольких режимов движения. В одном из вариантов выполнения изобретения орган 92 управления поворотом является поворотным элементом, содержащим потенциометр и имеющим нейтральное положение 140 и диапазон левых и правых положений. В другом варианте выполнения изобретения орган 92 управления поворотом представляет собой рулевое колесо с по существу такими же положениями установки. Предпочтительно, чтобы орган 92 управления поворотом мог поворачиваться на 150 градусов против часовой стрелки и на 150 градусов по часовой стрелке относительно нейтрального положения 140. При этом величина поворота экскаватора налево или направо предпочтительно пропорциональна углу поворота органа 92 управления поворотом относительно нейтрального положения 140 налево или направо соответственно.
Управление поворотом гусеничного траншейного экскаватора 30 с помощью органа 92 многорежимного управления поворотом фундаментально отличается от управления поворотом с использованием известных рычагов 64 и 66 управления левой и правой гусеницами. Известные рычаги 64 и 66 управления независимо управляют приводами 34 и 32 левой и правой гусениц, причем поворот обычно осуществляют путем увеличения скорости привода одной гусеницы относительно скорости привода другой. В отличие от известных рычагов, орган 92 управления поворотом управляет поворотом экскаватора 30, предпочтительно уменьшая скорость движения привода только одной гусеницы относительно скорости привода другой гусеницы.
Важное преимущество управления поворотом гусеничного траншейного экскаватора 30 при использовании органа 92 управления поворотом касается того, как осуществляется поворот при работе экскаватора 30 в режиме рытья и в транспортном режиме. Когда орган 94 выбора режима движения установлен в положение, соответствующее режиму рытья, орган 92 управления поворотом предпочтительно работает в соответствии с фиг. 14. Когда выбран транспортный режим, орган 92 управления поворотом предпочтительно работает в соответствии с фиг.15.
На фиг. 14 приведена зависимость между величинами скоростей приводов 34 и 32 левой и правой гусениц и сигналами, выдаваемыми органом 92 управления поворотом при работе гусеничного траншейного экскаватора 30 в режиме рытья. По оси Х отложен предпочтительный диапазон изменения сигнала, выдаваемого органом 92 управления поворотом. По оси Y отложен диапазон скоростей приводов гусениц при движении в прямом направлении, измеренных в процентах от полной скорости приводов гусениц. Полная скорость приводов гусениц предпочтительно определяется конкретной установкой органа 90 управления поступательным движением. При установке в нейтральное положение 140 орган 92 управления поворотом предпочтительно выдает сигнал 2,5 В, в результате чего экскаватор 30 двигается прямо. Выходные сигналы напряжением от 0 до 2,5 В предпочтительно соответствуют повороту налево, а выходные сигналы напряжением от 2,5 В до 5 В - повороту направо.
Поворот направо экскаватора 30 в режиме рытья осуществляется путем поворота органа 92 управления поворотом из нейтрального положения 140 по часовой стрелке по направлению к крайнему правому положению 144. Когда орган 92 управления поворотом поворачивается направо, скорость привода 34 левой гусеницы остается на уровне 100% от полной скорости, как показано линией 156, в то время как скорость привода 32 правой гусеницы уменьшается, что иллюстрируется линией 160. Аналогично, поворот гусеничного траншейного экскаватора 30 налево осуществляется поворотом органа 92 управления поворотом против часовой стрелки. Например, при максимально крутом повороте налево скорость привода 32 правой гусеницы остается на уровне 100% от максимальной, что иллюстрируется линией 154, а скорость привода 34 левой гусеницы равна нулю (точка 142 на линии 158).
В предпочтительном варианте выполнения изобретения орган 92 управления поворотом обеспечивает дополнительные функциональные возможности при работе гусеничного траншейного экскаватора 30 в транспортном режиме. При повороте в транспортном режиме приводы 34 и 32 левой и правой гусениц могут работать с противовращением, что позволяет производить повороты малого радиуса. Термин "противовращение" известен применительно к способу поворота на машинах тракторного типа, в котором привод одной гусеницы обеспечивает движение в прямом направлении, а привод второй - в обратном направлении.
Когда выбран режим управления поворотом при транспортировании, то часто желательна высокая маневренность. В предпочтительном варианте выполнения изобретения орган 92 управления поворотом осуществляет управление поворотом так, как описано выше в связи с фиг. 14, до тех пор, пока не будет достигнуто левое или правое положение 146 или 148 перехода. Установка органа 92 управления поворотом между положениями 146 или 148 перехода и крайними положениями 142 или 144 соответственно обеспечивает поворот гусеничного траншейного экскаватора 30 при маневрировании налево или направо с пропорциональным противовращением. В виде примера показано, что первоначально орган 92 управления поворотом установлен в нейтральное положение 140, которое соответствует положению часовой стрелки на 3 часа (3:00). Поворот экскаватора 30 налево осуществляют путем поворота органа 92 управления поворотом между позицией 3:00 и крайним левым положением 142 (позиция 10:00). Когда достигнуто положение 146 (позиция 12:30), для положения органа 92 управления поворотом между позициями 12:30 и 10:00 осуществляется противовращение. Поворот гусеничного траншейного экскаватора 30 направо осуществляют, по существу, аналогичным способом.
На фиг. 15 изображены предпочтительные характеристики органа 92 управления поворотом при работе гусеничного траншейного экскаватора 30 в режиме поворота при транспортировании. Например, поворот направо осуществляется путем поворота направо органа 92 управления поворотом из нейтрального положения 140 (позиция 3:00) в сторону крайнего правого положения 144 (позиция 8: 00). При установке органа 92 управления поворотом между нейтральным положением 140 и правым положением 148 перехода (позиция 5:30) правый поворот осуществляется посредством того, что скорость привода 34 левой гусеницы остается на уровне 100% от полной скорости, что показано линией 156, а скорость привода 32 правой гусеницы уменьшается, что показано линией 160.
Положение 148 перехода при повороте направо (позиция 5:30) характеризуется тем, что скорость привода 34 левой гусеницы составляет 100% от полной скорости, а скорость привода 32 правой гусеницы равна нулю. Дальнейший поворот органа 92 управления поворотом за положение 148 перехода приводит к тому, что скорость привода 32 правой гусеницы становится отрицательной. Максимально крутой поворот направо осуществляется установкой органа 92 управления поворотом в крайнее правое положение 144 (в позицию 8:00), при котором скорость привода 34 левой гусеницы в прямом направлении составляет 100% от полной скорости, а скорость привода 32 правой гусеницы в обратном направлении составляет 100% от полной скорости, то есть осуществляется стопроцентное противовращение.
Как описано выше, орган 92 управления поворотом обычно выдает сигналы напряжением от 0 до 2,5 В для осуществления поворотов налево и от 2,5 до 5 В для осуществления поворотов направо. Предпочтительно, чтобы в положениях 148 и 146 перехода орган 92 управления поворотом выдавал сигналы напряжением 1,25 и 3,75 В соответственно.
Ясно, что характеристики управления поворотом приведены на фиг. 14 и 15 только для иллюстрации и не ограничивают способ, посредством которого орган 92 управления поворотом может осуществлять управление поворотом гусеничного траншейного экскаватора. Например, на фиг. 14 и 15 изображено, что скорости приводов 34 и 32 гусениц прямо пропорциональны сигналам от органа 92 управления поворотом. Однако зависимость между скоростями приводов 34 и 32 гусениц и сигналами органа 92 управления поворотом может быть полиномиальной. Далее, скорости приводов левой и правой гусениц, соответствующие линиям 154 и 156 и равные 100% от полной скорости, могут быть меньше, чем полная скорость и не составлять постоянную долю от полной скорости. Кроме того, положения 146 и 148 перехода при повороте налево и направо могут соответствовать другим позициям органа 92 управления поворотом, отличным от позиций 12:30 и 5:30, изображенных на фиг. 13.
В еще одном варианте выполнения изобретения, как изображено на фиг. 20, орган 92 управления поворотом может быть не поворотным элементом, а рычагом. Нейтральное положение 140 соответствует движению гусеничного траншейного экскаватора 30 прямо, когда скорости приводов 34 и 32 левой и правой гусениц предпочтительно совпадают. Диапазон правых положений органа 92 управления поворотом расположен между нейтральным положением 140 и крайним правым положением 144. Орган 92 многорежимного управления поворотом, изображенный на фиг. 20, предпочтительно работает по меньшей мере в двух режимах: в режиме рытья и транспортном режиме.
Поворот экскаватора направо в режиме рытья осуществляют перемещением органа 92 управления поворотом от нейтрального положения 140 в направлении к крайнему правому положению 144, а поворот налево осуществляют перемещением органа 92 управления поворотом от нейтрального положения 140 к крайнему левому положению 142. Регулировка скоростей приводов 34 и 32 правой и левой гусениц в ответ на перемещение органа 92 управления поворотом, изображенного на фиг. 20, предпочтительно аналогична той, которая была описана в связи с фиг.14.
Когда экскаватор находится в транспортном режиме, управление его поворотом с помощью органа 92 управления поворотом, изображенного на фиг.20, осуществляется аналогично путем перемещения органа 92 управления поворотом в заданное положение налево или направо относительно нейтрального положения 140. Перемещение органа 92 управления поворотом за пределы диапазона между левым и правым положениями 146 и 148 перехода вызывает соответственно поворот налево или направо с противовращением приводов гусениц предпочтительно способом, аналогичным описанному выше в связи с фиг. 15.
На фиг. 16 иллюстрируется новый способ управления гусеничным траншейным экскаватором 30 с помощью органа 92 многорежимного управления поворотом при переходе между движением вперед и назад. Экскаватор 30 имеет сиденье 54 для оператора, с которого оператор установил орган 92 управления поворотом в правое положение 266 для осуществления поворота направо на 40 градусов по отношению к положительному направлению 272 оси X. Двигаясь вперед, экскаватор предпочтительно будет следовать вдоль кривой 262.
Предположим, что при движении экскаватора вперед вдоль кривой 262 оператор устанавливает орган 90 управления поступательным движением в положение, соответствующее движению назад, тогда экскаватор 30 начнет двигаться в обратном направлении предпочтительно вдоль кривой 260. Следует отметить, что кривая 260 движения назад нормально достигается при левом положении органа управления поворотом, соответствующем повороту налево на 140 градусов относительно положительного направления 272 оси Х (или на 40 градусов относительно отрицательного направления 274 оси X), что на 180 градусов отличается от первоначально выбранного положения 266 органа управления поворотом, соответствующего повороту направо на 40 градусов и движению вперед вдоль кривой 262. Предпочтительно, однако, чтобы при движении назад вдоль кривой 260 орган 92 управления поворотом оставался в том же положении 266, соответствующем повороту на 40 градусов относительно положительного направления 272 оси X. Автор установил, что осуществление уникальной операции, заключающейся в "переброске" органа 92 управления поворотом на 180 градусов, например, автоматическое изменение угла поворота, установленного органом управления поворотом на 180 градусов в результате перехода от движения вперед к движению назад и, наоборот, делает манипуляции по выполнению поворота интуитивно понятными и естественными для оператора.
Новый орган 90 управления поступательным движением и новый орган 92 управления поворотом совместно с компьютером 182 обеспечивают дополнительные функциональные возможности по управлению поступательным движением и поворотом гусеничного траншейного экскаватора 30, как показано на фиг.17. Хотя на фиг. 17 показано, что как орган 90 управления поступательным движением, так и орган 92 управления поворотом входят в систему управления и при описании работы экскаватора 30 они рассматриваются совместно, ясно, что каждый из этих органов 90 и 92 управления обеспечивает свои дополнительные функциональные возможности независимо от другого. Например, преимущества, обсуждаемые выше при рассмотрении управления поступательным движением экскаватора 30, достигаемые с помощью органа 90 многорежимного управления поступательным движением, реализуются независимо от того, входит ли в систему управления, изображенную на фиг.17, орган 92 управления поворотом. Аналогично, преимущества, даваемые новым органом 92 управления поворотом, реализуются даже если орган 90 управления поступательным движением не входит в такую систему управления.
В предпочтительной конфигурации привод 34 левой гусеницы содержит насос 38 левой гусеницы, соединенный с двигателем 42 левой гусеницы, а привод 32 правой гусеницы содержит насос 40 правой гусеницы, соединенный с двигателем 44 правой гусеницы. С двигателями 42 и 44 левой и правой гусениц предпочтительно соединены датчики 198 и 192 двигателей левой и правой гусениц соответственно. Насосы 38 и 40 левой и правой гусениц, работающие от двигателя 36, регулируют поток масла к двигателям 42 и 44 левой и правой гусениц, которые, в свою очередь, приводят в движение приводы 34 и 32 левой и правой гусениц.
Землеройное устройство 46 содержит привод 48 и орган 98 управления этим устройством, причем устройство 46 предпочтительно получает энергию от двигателя 36. К двигателю 48 землеройного устройства предпочтительно подключен датчик 186. Работа двигателей 42 и 44 левой и правой гусениц и двигателя 48 устройства 46 контролируется датчиками 198, 192 и 186 соответственно. Сигналы с выходов датчиков 198, 192 и 186 подаются в компьютер 182.
Компьютер 182 после получения сигнала режима движения от органа 94 управления режимом движения изменяет функциональные возможности органа 92 многорежимного управления поворотом и органа 90 многорежимного управления поступательным движением для их работы в транспортном режиме или в режиме рытья. Орган 94 управления режимом движения при выборе транспортного режима генерирует сигнал, соответствующий транспортному режиму, и передает его в компьютер 182, а при выборе режима рытья генерирует сигнал, соответствующий транспортному режиму, и перелает его в компьютер 182. Реагируя на состояние органа 94 управления режимом движения, компьютер 182 изменяет функциональные возможности органа управления поворотом и органа управления поступательным движением для их работы в соответствии с описанным выше способом.
В соответствии с сигналами от органов управления поворотом и поступательным движением компьютер 182 вырабатывает сигналы управления предпочтительно в форме токовых сигналов управления и подает их на насосы 38 и 40 левой и правой гусениц, которые, в свою очередь, регулируют скорость двигателей 42 и 44 левой и правой гусениц. Датчики 193 и 192 двигателей левой и правой гусениц передают в компьютер 182 сигналы, соответствующие фактической скорости этих двигателей 42 и 44. Аналогично, датчик 208, соединенный с двигателем 36, вырабатывает сигнал, соответствующий выходному параметру этого двигателя, и подает его в компьютер 182, таким образом замыкая петлю управления для тракторной части 45 экскаватора 30. Специалистам в данной области должно быть понятно, что для создания подходящей базы для эффективного изменения поступательного движения и поворота экскаватора 30 в ответ на сигналы поступательного движения и поворота, вырабатываемые органом 90 многорежимного управления поступательным движением и органом 92 многорежимного управления поворотом, могут быть использованы различные известные компьютеры.
Землеройное устройство 46 экскаватора 30 включает двигатель 48 этого устройства, орган 98 управления этим устройствам и по меньшей мере один относящийся к нему датчик 186. Привод 48 землеройного устройства предпочтительно реагирует на команды, поступающие на орган 98 управления из компьютера 182. Фактическое значение выходного параметра двигателя 48 устройства 46 контролируется датчиком 186, сигнал которого поступает в компьютер 182.
В предпочтительном варианте выполнения изобретения датчики двигателей 198 и 192 левой и правой гусениц являются магнитными импульсными преобразователями. Магнитные импульсные преобразователи 198 и 192 преобразуют вращение двигателей гусениц в непрерывную последовательность импульсных сигналов, соответствующую частоте вращения двигателя гусеницы, измеренной в оборотах в минуту.
Другое важное преимущество системы управления экскаватором, содержащей новый орган 90 управления поступательным движением, состоит в том, что компьютер 182 поддерживает заданный уровень движущей силы у приводов 34 и 32 левой и правой гусениц при работе экскаватора 30 в транспортном режиме. Когда выбран транспортный режим, орган 90 управления поступательным движением предпочтительно вырабатывает управляющий сигнал поступательного движения при транспортировании, который соответствует заданной скорости двигателей 42 и 44 левой и правой гусениц, как правило измеряемой в оборотах в минуту. Преобразование сигнала поступательного движения при транспортировании в заданную скорость двигателя гусеницы может осуществляться самим органом 90 управления поступательным движением или, предпочтительно, компьютером 182.
Компьютер 182 сравнивает сигналы контроля двигателей левой и правой гусениц, вырабатываемые левым и правым магнитными импульсными преобразователями 198 и 192 соответственно, с заданным уровнем движущей силы двигателей гусениц, представленным сигналом поступательного движения при транспортировании. Реагируя на результат сравнения, компьютер 182 посылает соответствующие сигналы управления насосом в насосы 38 и 40 левой и правой гусениц для компенсации любого расхождения между фактическими и заданными уровнями движущей силы от двигателей гусениц.
Ниже со ссылками на фиг.21-24 более детально описан способ, с помощью которого компьютерная система управляет поступательным движением гусеничного траншейного экскаватора 30 в ответ на сигналы управления, вырабатываемые новым органом 90 многорежимного управления поступательным движением. На фиг. 21 и 22 иллюстрируется один вариант процесса управления, с помощью которого компьютер 182 управляет поступательным движением экскаватора 30 при
его работе в транспортном режиме движения. Когда выбран транспортный режим (операция 340), компьютер 182 преобразует аналоговый управляющий сигнал поступательного движения, выданный органом 90 управления поступательным движением, в соответствующий цифровой управляющий сигнал поступательного движения при транспортировании (операция 342).
При работе гусеничного траншейного экскаватора 30 на холостом ходу, когда энергия на двигатели 42 и 44 левой и правой гусениц не поступает, сигнал поступательного движения при транспортировании предпочтительно равен 2,5 В, как описано выше при рассмотрении фиг.9 и 10. Величину сигнала поступательного движения при транспортировании проверяют (операция 344), и если обнаружено, что она равна 2,5 В, то в устройства управления электрическим смещением, которые управляют производительностью левого и правого насосов 38 и 40, ток не подается. Если сигнал поступательного движения при транспортировании превышает 2,5 В, что определяют в операции 348, то управляющий ток, подаваемый в устройства управления электрическим смещением левого и правого насосов, предпочтительно является током положительной полярности. Сигнал поступательного движения при транспортировании меньший, чем 2,5 В, предпочтительно соответствует управляющему току отрицательной полярности (операция 352). Затем сигнал поступательного движения при транспортировании преобразуется в компьютере 182 (операция 354) в соответствующую заданную скорость двигателей гусениц. Компьютер 182 связывает величину цифрового сигнала поступательного движения при транспортировании с соответствующей заданной скоростью двигателей гусениц в пределах диапазона заданных скоростей, заранее записанных в компьютере 182. Следует отметить, что компьютер 182 обычно вычисляет необходимую величину управляющего тока, подаваемого в насосы 38 и 40 левой и правой гусениц, для обеспечения работы двигателей 42 и 44 левой и правой гусениц с заданной скоростью, соответствующей сигналу поступательного движения при транспортировании.
Как показано на фиг.22, сигналы с выходов датчиков 198 и 192 двигателей 42 и 44 левой и правой гусениц анализируют в операции 360 и определяют фактические скорости двигателей гусениц. Фактические скорости двигателей гусениц сравнивают (операция 362) с заданными скоростями двигателей гусениц и, если они равны, сохраняют величину управляющего положительного или отрицательного тока (операция 364), подаваемого в устройства управления электрическим смещением насосов. Если фактическая скорость двигателей гусениц больше, чем заданная скорость двигателей гусениц (операция 366), то компьютер 182 в операции 368 уменьшает ток положительной или отрицательной полярности, подаваемый в блоки управления электрическим смещением насосов. Если фактическая скорость двигателей гусениц меньше, чем заданная скорость двигателей гусениц, то управляющий ток, подаваемый в устройства управления электрическим смещением насосов, увеличивают (операция 370).
Орган 90 многорежимного управления поступательным движением совместно с компьютером 182 обеспечивают дополнительные функциональные возможности при движении экскаватора 30 в режиме рытья. При работе в режиме рытья компьютер 182, реагируя на состояние двигателя 36, предпочтительно уменьшает движущую силу от двигателей 42 и 44 правой и левой гусениц. Когда компьютер 182 получает от органа 94 управления режимом движения сигнал, соответствующий поступательному движению при рытье, орган 90 управления поступательным движением вырабатывает сигнал поступательного движения при рытье, который предпочтительно соответствует заданному уровню выходного параметра двигателя 36. Например, может быть желательно, чтобы при рытье конкретный двигатель работал со скоростью 2200 об/мин. Соответственно, орган 90 управления поступательным движением в крайнем 112 из положений, соответствующих движению вперед, вырабатывает сигнал поступательного движения при рытье, соответствующий заданному уровню выходного параметра двигателя 2200 об/мин. Уровни выходного параметра двигателей 42 и 44 левой и правой гусениц будут отрегулированы компьютером 182 так, что будет поддерживаться заданный уровень выходного параметра двигателя 2200 об/мин, предпочтительно в пределах допуска.
В одном варианте выполнения изобретения для обеспечения работы двигателя 36 с заданным уровнем выходного параметра компьютер 182 изменяет сигнал 90 поступательного движения при рытье. При этом в процессе рытья оператору не нужно никак регулировать орган 90 управления поступательным движением. Вместо этого компьютер 182 изменяет или масштабирует сигнал поступательного движения при рытье до подходящего уровня, чтобы эффективно увеличить или уменьшить уровень движущей силы от двигателей 42 и 44 левой и правой гусениц в зависимости от нагрузки на двигатель 36. Таким образом, компьютер 182 управляет нагрузкой двигателя 36 путем изменения уровня движущей силы от приводов 34 и 32 левой и правой гусениц во время рытья. Известны различные аналоговые и цифровые устройства для осуществления управления нагрузкой двигателя так, чтобы в условиях разных нагрузок обеспечить постоянную скорость вращения двигателя. Одним из аналоговых устройств управления нагрузкой является контроллер нагрузки модели МСЕ101С, изготовленный компанией Sauer Sundstrand. Подходящим цифровым устройством, которое может быть использовано для управления нагрузкой двигателя, является микроконтроллер модели DC2, также изготовленный компанией Sauer Sundstrand.
Датчики 198 и 192 двигателей левой и правой гусениц предпочтительно посылают сигналы, соответствующие фактическим скоростям двигателей гусениц, измеренным в оборотах в минуту, в компьютер 182. Двигатель 36 предпочтительно содержит датчик 208 двигателя, который контролирует его скорость, также измеряемую в оборотах в минуту, и посылает сигнал, соответствующий фактической скорости этого двигателя, в компьютер 182. Любое рассогласование между фактическим и заданным уровнями выходного параметра двигателя компенсируется с помощью компьютера 182, который выдает соответствующие сигналы управления насосами в насосы 38 и 40 левой и правой гусениц, которые, в свою очередь, регулируют скорость двигателей 42 и 44 левой и правой гусениц.
На фиг.23 и 24 показано, что, когда получен сигнал, соответствующий режиму рытья (операция 300), аналоговый управляющий сигнал поступательного движения при рытье, выработанный органом 90 управления поступательным движением, преобразуется в операции 302 в цифровой управляющий сигнал поступательного движения при рытье. Если управляющий сигнал поступательного движения при рытье равен 2,5 В (операция 304), то в устройства управления электрическим смещением левого и правого насосов 38 и 40 ток не подается (операция 306). Если управляющий сигнал поступательного движения при рытье превышает 2,5 В, то управляющий ток, подаваемый в устройства управления электрическим смещением насосов, является током положительной полярности (операция 310). Если управляющий сигнал поступательного движения при рытье меньше 2,5 В, то управляющий ток имеет отрицательную полярность (операция 312). Сигнал поступательного движения при рытье преобразуют (операция 314) в соответствующую заданную скорость вращения двигателя, предпочтительно сопоставляя управляющий сигнал поступательного движения при рытье с соответствующей величиной заданной скорости вращения двигателя, которая хранится в компьютере 182.
Фактическую скорость двигателя 36 определяют (операция 320) путем анализа сигнала от датчика 208. Если фактическая скорость вращения двигателя равна заданной скорости двигателя (операция 322), то величина тока положительной или отрицательной полярности, подаваемого в устройства управления электрическим смещением насосов, не изменяется (операция 324). Если фактическая скорость вращения двигателя больше, чем заданная скорость вращения двигателя, то величину тока положительной или отрицательной полярности, подаваемого в устройства управления электрическим смещением насосов, уменьшают (операция 328). Если скорость вращения двигателя меньше, чем заданная скорость вращения двигателя, то величину тока положительной или отрицательной полярности, подаваемого в устройства управления электрическим смещением насосов, увеличивают (операция 330).
На фиг.25-32 изображен вариант способа, в котором компьютер 182 в ответ на управляющие сигналы поворота, вырабатываемые органом 92 управления поворотом, осуществляет управление поворотом гусеничного траншейного экскаватора 30. Орган 92 многорежимного управления поворотом предпочтительно работает в нескольких режимах движения: по меньшей мере в транспортном режиме и в режиме рытья. На (фиг. 25-30 иллюстрируется один из вариантов способа управления поворотом гусеничного траншейного экскаватора 30 в транспортном режиме, а на фиг. 31 и 32 иллюстрируется способ управления поворотом экскаватора 30 в режиме рытья.
В соответствии с фиг.25 и 26 определяют заданные скорости (VR и VL) двигателей 42 и 44 левой и правой гусениц (операция 390). Заданные скорости (VR и VL) двигателей 42 и 44 левой и правой гусениц предпочтительно получают из сигнала органа управления поступательным движением, поступающего в компьютер 182. Альтернативно, подходящий сигнал, соответствующий заданному или выбранному уровню движущей силы приводов 34 и 32 левой и правой гусениц, может быть использован в операции 390 для вычисления заданных скоростей (VR и VL) двигателей 42 и 44 левой и правой гусениц. После получения (операция 392) сигнала, соответствующего транспортному режиму, компьютер 182 преобразует аналоговый управляющий сигнал поворота, полученный от органа 92 управления поворотом, в цифровой управляющий сигнал поворота (операция 394).
Если в операции 396 управляющий сигнал поворота равен 2,5 В, то анализируют сигналы датчиков 198 и 192 двигателей 42 и 44 левой и правой гусениц соответственно и определяют фактические скорости (VRA и VLA) двигателей 42 и 44 левой и правой гусениц (операция 400). Эти фактические скорости VRA и VLA двигателей 42 и 44 левой и правой гусениц в операциях 402 и 412 сравниваются со заданными скоростями VR и VL двигателей 42 и 44 левой и правой гусениц. Если вычисленные фактические скорости двигателей левой и правой гусениц равны заданным скоростям двигателей левой и правой гусениц, то ток, подаваемый в устройства управления электрическим смещением левого и правого насосов 38 и 40, поддерживают постоянным (операция 404 и 414). Если фактические скорости VRA и VLA двигателей гусениц больше заданных скоростей VR и VL двигателей гусениц, то управляющий ток, подаваемый в устройства управления электрическим смещением левого и правого насосов, уменьшают (операция 408 и 418 соответственно). Если фактические скорости VRA и VLA двигателей гусениц меньше заданных скоростей VR и VL двигателей гусениц, то управляющий ток, подаваемый в устройства управления электрическим смещением левого и правого насосов, увеличивают (операция 410 и 420 соответственно).
Процесс управления, показанный на фиг.27, иллюстрирует новые возможности органа 92 управления поворотом, когда он для осуществления поворота направо установлен между нейтральным положением 140 и правым положением 148 перехода. При установке органа 92 управления поворотом между этими положениями сигнал от этого органа управления поворотом предпочтительно лежит в пределах от 2,5 до 3,75 В. Когда компьютер 182 определяет (операция 440), что сигнал органа управления поворотом находится в этом диапазоне, скорость двигателя 42 левой гусеницы остается равной 100% от заданной скорости VL двигателя гусеницы. Для осуществления правого поворота ток положительной полярности, подаваемый в блок управления электрическим смещением правого насоса 40, уменьшают (операция 444) и определяют (операция 446) фактическое замедление двигателя 44 правой гусеницы путем анализа сигнала датчика двигателя правой гусеницы. Как было указано выше при описании фиг. 14, степень замедления двигателя 44 правой гусеницы предпочтительно прямо пропорциональна сигналу поворота, вырабатываемому органом 92 управления поворотом в диапазоне от 2,5 до 3,75 В.
Например, компьютер 182 в соответствии с положением органа 92 управления поворотом предпочтительно вычисляет (операция 448) новую заданную скорость двигателя 44 правой гусеницы путем умножения первоначальной скорости VR двигателя правой гусеницы на масштабный коэффициент. Следует отметить, что величина масштабного коэффициента предпочтительно задается уравнением, определяющим характеристическую кривую 160 поворота, изображенную на фиг. 15, и отражает изменение в процентах величины сигнала (SS) поворота от максимального при 2,5 В до минимального при 5 В. Если фактическая скорость VRA двигателя правой гусеницы равна новой заданной скорости двигателя правой гусеницы, вычисленной в операции 448, то величину управляющего тока положительной полярности, подаваемого в устройство управления электрическим смещением правого насоса 40, оставляют неизменной (операция 450). Если фактическая скорость VRA двигателя правой гусеницы меньше новой заданной скорости двигателя правой гусеницы, то управляющий ток положительной полярности, подаваемый в устройство управления электрическим смещением правого насоса 40, увеличивают (операция 454), и если при этом положение органа 92 управления поворотом не изменилось, то снова проводят операцию 446 анализа сигнала датчика двигателя правой гусеницы для определения фактической скорости VRA после увеличения управляющего тока положительной полярности. Если фактическая скорость VRA двигателя правой гусеницы больше новой заданной скорости двигателя правой гусеницы, то управляющий ток положительной полярности, подаваемый в устройство управления электрическим смещением правого насоса 40, уменьшают (операция 444).
При перемещении органа 92 управления поворотом дальше вправо за положение 148 перехода новая система управления поворотом осуществляет правый поворот с противовращением. Предпочтительно, чтобы поворот направо с противовращением соответствовал выходному сигналу органа 92 управления поворотом в пределах от 3,75 до 5 В, как показано на фиг. 15 и 28. Когда сигналы органа 92 управления поворотом находятся в этом диапазоне, скорость двигателя 42 левой гусеницы остается на уровне 100% от полной скорости VL двигателя левой гусеницы (операция 462). Следует отметить, что при осуществлении правого поворота с противовращением двигатель 44 правой гусеницы вращается в обратном направлении по отношению к двигателю 42 левой гусеницы. Поэтому в устройство управления электрическим смещением правого насоса 40 подают ток отрицательной полярности (операция 464), вынуждая двигатель 44 правой гусеницы вращаться в противоположном направлении. Фактическую скорость VRA двигателя 44 правой гусеницы, как по величине, так и по направлению, определяют путем анализа сигнала датчика 192 магнитного импульсного преобразователя двигателя правой гусеницы (операция 466).
Компьютер в соответствии с положением органа 92 управления поворотом вычисляет новую заданную скорость для двигателя 44 правой гусеницы путем умножения первоначальной скорости VR двигателя правой гусеницы на масштабный коэффициент. Для ясности, абсолютные значения вычисленных величин сравниваются (операция 468), хотя вычисление относительной разности между фактической и заданной скоростями двигателя правой гусеницы может осуществляться другим способом. Если фактическая скорость VRA двигателя правой гусеницы равна новой заданной скорости двигателя правой гусеницы, то управляющий ток отрицательной полярности, подаваемый в устройство управления электрическим смещением правого насоса, оставляют неизменным (операция 470). Если абсолютная величина фактической скорости VRA двигателя правой гусеницы больше, чем абсолютная величина новой заданной скорости двигателя правой гусеницы, то управляющий ток отрицательной полярности, подаваемый в устройство управления электрическим смещением правого насоса, уменьшают (операция 474). Если абсолютная величина фактической скорости двигателя правой гусеницы меньше, чем абсолютная величина новой заданной скорости двигателя правой гусеницы, то компьютер 182 увеличивает управляющий ток отрицательной полярности, подаваемый в устройство управления электрическим смещением правого насоса 40 (операция 464).
На фиг.29 и 30 иллюстрируется последовательность операций по управлению поворотом для осуществления левого поворота экскаватора 30 в транспортном режиме. Способ, с помощью которого осуществляется левый поворот экскаватора 30 с противовращением гусениц, предпочтительно осуществляется по существу аналогично правым поворотам, описанным выше со ссылками на фиг.27 и 28. Ясно, однако, что масштабные коэффициенты и уравнения для расчета новой заданной скорости двигателя левой гусеницы отличаются от коэффициентов и уравнения, соответствующих правым поворотам.
В режиме рытья гусеничного траншейного экскаватора 30 орган 92 многорежимного управления поворотом обеспечивает другие функциональные возможности. В одном варианте выполнения изобретения, изображенном на фиг. 14, 31 и 32, движение гусеничного траншейного экскаватора 30 в прямом направлении соответствует сигналу органа 92 управления поворотом, равному 2,5 В с некоторым допуском. Компьютер 182 предпочтительно связывает сигналы поворота от органа 92 управления поворотом, превышающие 2,5 В, с поворотом гусеничного траншейного экскаватора 30 направо (операция 520). Скорость вращения двигателя 42 левой гусеницы поддерживают на уровне 100% от заданной скорости VL (операция 522), а управляющий ток положительной полярности, подаваемый в устройство управления электрическим смещением правого насоса, уменьшают (операция 524). Фактическую скорость VRA двигателя 44 правой гусеницы определяют, анализируя сигнал датчика 192 двигателя правой гусеницы (операция 526), и сравнивают ее с новой заданной скоростью двигателя 44 правой гусеницы (операция 528). Следует отметить, что масштабный коэффициент, указанный в операции 528 как ((5,0-SS)/2,5), определяют из уравнения линии 160, описывающего предпочтительную зависимость между выходным сигналом органа 92 управления поворотом и изменением скорости вращения двигателя 44 правой гусеницы.
Управляющий ток положительной полярности, подаваемый в блок управления электрическим смещением правого насоса, поддерживают неизменным (операция 530) до тех пор, пока фактическая скорость VRA двигателя 44 правой гусеницы равна новой заданной скорости двигателя 44 правой гусеницы. В зависимости от результата сравнения фактической и новой заданной скоростей двигателя правой гусеницы, выполненного компьютером 182 (операция 532), управляющий ток положительной полярности или увеличивают (операция 534), или уменьшают (операция 524). Поворот экскаватора 30 налево осуществляется, по существу, аналогично способу, описанному выше при рассмотрении фиг.31. Следует отметить, что поворот гусеничного траншейного экскаватора 30 с противовращением в режиме рытья предпочтительно отсутствует. Таким образом, управление поворотом гусеничного траншейного экскаватора 30 в режиме движения с рытьем осуществляется путем уменьшения тока положительной полярности, подаваемого в устройство управления электрическим смещением насоса двигателя соответствующей гусеницы.
Одно значительное преимущество новой системы управления поступательным движением и поворотом, показанной на фиг. 17, состоит в том, что информация, относящаяся к работе экскаватора 30, предоставляется оператору. Дисплей 100, изображенный на фиг. 7, соединен с компьютером 182 и предпочтительно отображает сообщения о рабочем состоянии экскаватора и информацию, касающуюся диагностики, калибровки, отказов, безопасности и т.п. Дисплей 100 обеспечивает оператора быстрой, точной и понятной информацией с помощью компьютера, который получает и обрабатывает данные от множества датчиков в экскаваторе. Поэтому оператору для эффективного и безопасного управления экскаватором 30 не нужно запоминать и мысленно интерпретировать и оценивать относительную важность множества показаний известных индикаторов. Введение дисплея 100 в схему управления и обеспечение оператора множеством мгновенно понятных информационных сообщений коренным образом изменяет способ управления экскаватором 30.
Дисплей 100 предпочтительно является жидкокристаллическим дисплеем, хотя могут быть использованы другие типы дисплеев, например катоднолучевая трубка. Переключатель 99 выбора сообщения расположенный близко к дисплею 100, является средством для выбора множества информационных сообщений, например показанных на фиг. 18. Переключение переключателя 99 выбора сообщения предпочтительно приводит к отображению на дисплее 100 дополнительных информационных сообщений.
На фиг. 18 изображено несколько примеров сообщений, которые могут быть представлены оператору экскаватора 30 при использовании дисплея 100. Например, сообщение 210 показывает, что экскаватор 30 работает в транспортном режиме при скорости 98 фут/мин (30 м/мин), причем переключатель 96 диапазона скорости установлен в положение "низкий". Кроме того, сообщение 210 показывает, что экскаватор 30 производит левый поворот с крутизной, составляющей 10% от максимально возможной. Показано, что землеройное устройство, установленное на экскаваторе 30, является многоковшовой лопатой 50. В текущий момент многоковшовая лопата 50 находится в нерабочем состоянии, о чем свидетельствует показание 0% от полной мощности устройства 46. Должно быть понятно, что эта информация, в частности касающаяся скорости и поворота экскаватора 30, раньше при использовании известной панели 62 управления была недоступна оператору экскаватора 30. Вместо этого, после наблюдения и интерпретации состояния различных аналоговых индикаторных приборов опытный оператор мог лишь грубо оценить эти параметры.
Информационное сообщение 211 о состоянии показывает, что гусеничный траншейный экскаватор 30 в настоящий момент работает в диапазоне "низкий" в режиме рытья со скоростью 1,3 фут/мин (0,4 м/мин). Указано, что многоковшовая лопата 50 в настоящий момент работает на 72% от максимальной мощности землеройного устройства 46, а экскаватор 30 движется прямо и не совершает никакого поворота.
Оператору могут передаваться различные другие сообщения о состоянии, например, сообщение 212, в котором говорится о том, что текущая скорость вращения двигателя составляет 2200 об/мин, полное время работы двигателя составляет 332,1 часа, а напряжение батареи равно 12,2 В. Следует понимать, что сообщения о состоянии, приведенные на фиг. 18, даны только для иллюстрации и не ограничивают характер информации, передаваемой через дисплей 100.
В дополнении к сообщениям, описывающим состояние различных рабочих параметров экскаватора 30, через дисплей 100 оператору поступают сообщения об отказах в результате аномальных условий эксплуатации. Гусеничный траншейный экскаватор 30 имеет множество датчиков в дополнении к тем, которые показаны на фиг. 17. Другие механические или электрические элементы, входящие в состав экскаватора 30, как правило включают один или несколько датчиков, контролирующих рабочее состояние конкретного элемента. Например, дроссель 206 двигателя 36 может иметь датчик, который контролирует напряжение или другие параметры дросселя 206. Информация о неисправной работе дросселя 206 может быть передана оператору как сообщение 213 об отказе, показывающее, что зарегистрирован неприемлемый электрический сигнал от датчика дросселя.
Об отсутствии сигнала от датчика 198 двигателя левой гусеницы или отсутствии приема этого сигнала компьютером 182 указывается в сообщении 214. Кроме того, могут быть выданы другие сообщения о более серьезных нарушениях работы, например, сообщение 215 о слишком низком давлении масла или сообщение 216 о слишком высокой температуре воды или охладителя. Кроме того, при выполнении текущего технического обслуживания, ремонта и калибровки гусеничного траншейного экскаватора 30 оператору могут быть выданы разные команды. Далее, для оператора дисплей 100 является интерактивным средством, которое по существу улучшает работу и техническое обслуживание экскаватора 30, увеличивает количество информации, выдаваемой оператору, и повышает ее качество.
Одна из важных характеристик нового дисплея и системы управления касается защитных мер, в результате которых при обнаружении аномальных ситуаций в работе двигатель 36 автоматически выключается. Два из таких серьезных нарушений в работе двигателя, когда зафиксировано слишком низкое давление масла или слишком высокая температура воды, указаны в сообщениях 215 и 216 об отказе. При обнаружении серьезного нарушения в работе двигателя компьютер 182 предпочтительно вырабатывает последовательность сигналов выключения, в результате которых спустя заранее заданное время двигатель автоматически выключается.
Предупреждения 216 и 217 на фиг.18, указывают, что двигатель будет выключен через 30 секунд из-за слишком высокой температуры воды, таким образом, оператор получает информацию как о времени, оставшемся до выключения двигателя, так и о природе неисправности. Предпочтительно, чтобы компьютер 182 также управлял элементом 204 подачи топлива, который регулирует подачу топлива в двигатель 36. По окончании последовательности сигналов выключения, т. е. по истечении 30 секунд, компьютер командует органу 204 подачи топлива прекратить подачу топлива в двигатель 36, в результате чего двигатель 36 выключается.
Другое важное преимущество касается различных мер, повышающих безопасность оператора. В одном варианте выполнения изобретения в сиденье 54 оператора установлен датчик 200, соединенный с компьютером 182. Датчик 200 сиденья оператора является нормально замкнутым переключателем или переключателем другого типа, который контролирует присутствие оператора на сиденье 54.
Альтернативно, датчик 200 может быть приспособлен для обнаружения присутствия оператора в заранее заданной зоне, например, зоне, предназначенной для управления гусеничным траншейным экскаватором 30, и если оператор покидает эту зону, то этот датчик посылает сигнал в компьютер. Подходящими средствами контроля присутствия оператора в зоне управления гусеничным траншейным экскаватором 30 могут быть датчик усилия, например, в коврике, покрывающем пол в заранее заданной зоне управления, или датчик присутствия, использующий луч света.
При получении сигнала об отсутствии оператора от датчика 200 сиденья оператора компьютер 182 предпочтительно вырабатывает сигнал запрета управления, который прерывает или другим способом запрещает работу приводов 34 и 32 левой и правой гусениц. Следует отметить, что прерывание работы приводов 32 и 34 гусениц может быть осуществлено посредством выключения двигателя 36. Однако предпочтительно, чтобы при получении компьютером 182 сигнала об отсутствии оператора двигатель 36 продолжал работать, а прерывалась или выключалась подача мощности на приводы 34 и 32 левой и правой гусениц. При этом нагрузка на двигатель 36 резко снижается. Причина такого прерывания предпочтительно сообщается оператору с помощью дисплея 100, также как и инструкции по тому, какие шаги следует предпринять для продолжения нормальной работы экскаватора 30.
В одном варианте выполнения изобретения нормальная работа гусеничного траншейного экскаватора 30 не прерывается, если оператор возвратится на сиденье 54 в пределах заранее заданного промежутка времени после первоначальной выдачи датчиком 200 сигнала об отсутствии оператора. Например, если оператор покинул сиденье 54, но возвратился на него в пределах 6 секунд, то работа левой и правой гусениц 34 и 32 не нарушается. Кроме того, компьютер 182 после получения сигнала об отсутствии не только останавливает левую и правую гусеницы 34 и 32, но и предпочтительно полностью прерывает работу землеройного устройства 46.
В описанные здесь предпочтительные варианты выполнения изобретения могут быть внесены различные модификации и добавления без изменения сущности и объема настоящего изобретения. Следовательно, объем настоящего изобретения не ограничивается конкретными вариантами его выполнения, описанными выше, а определяется только формулой изобретения.
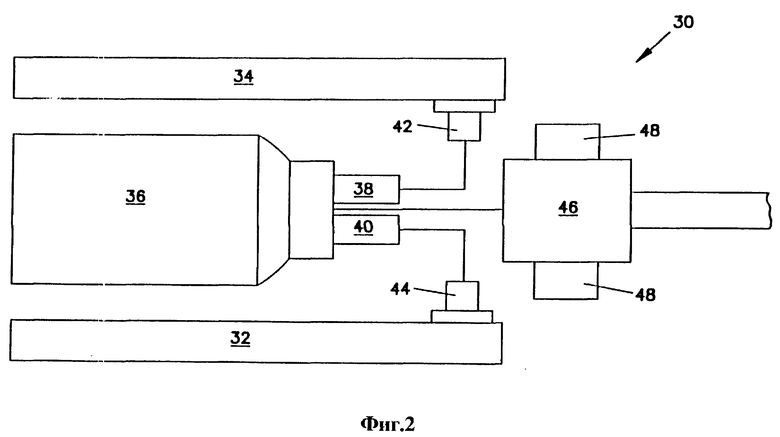
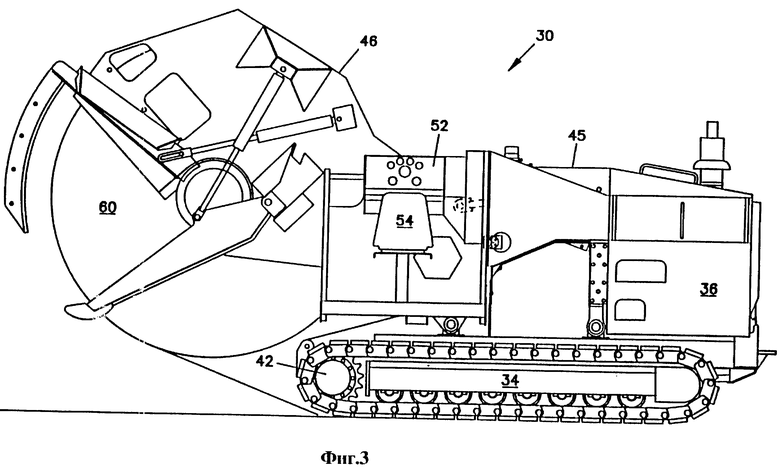
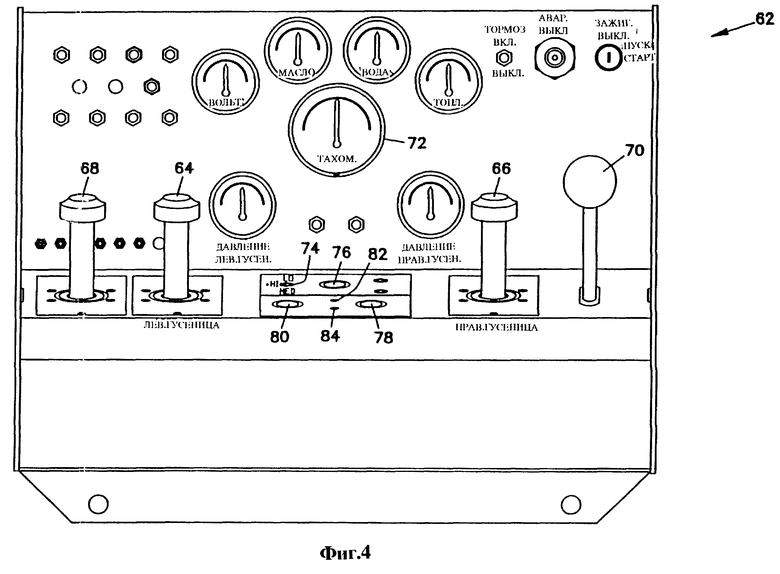
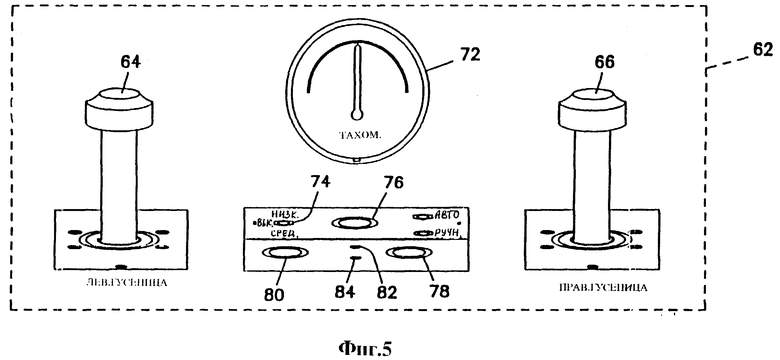
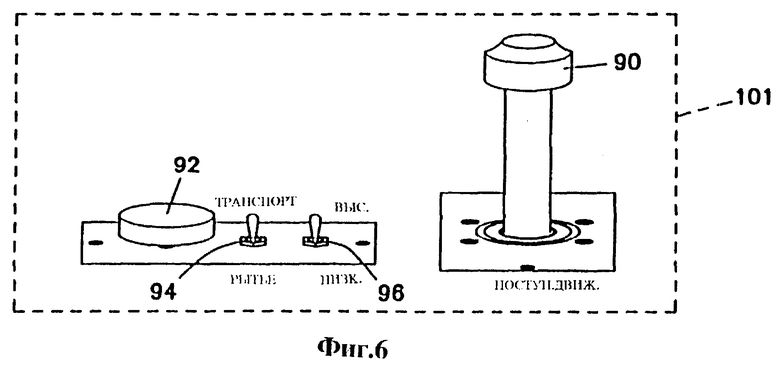
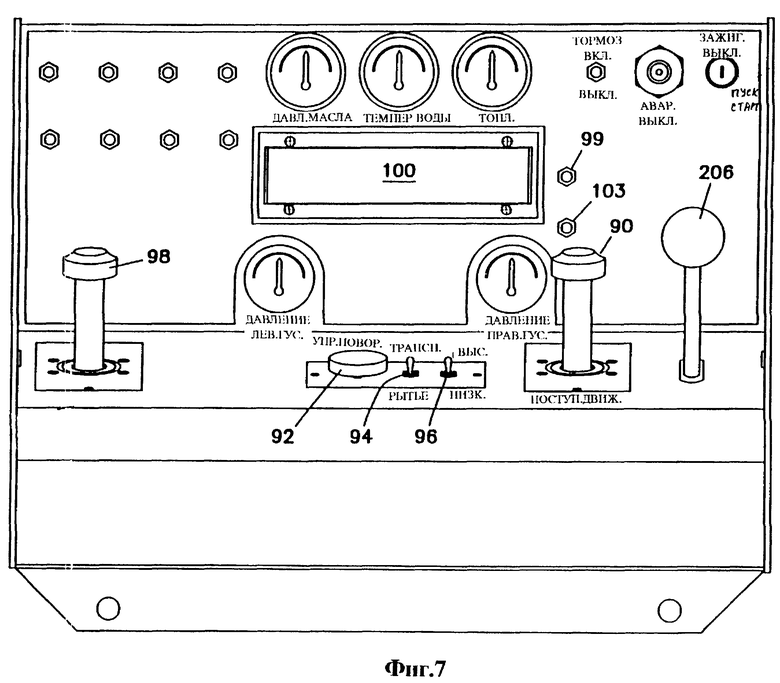
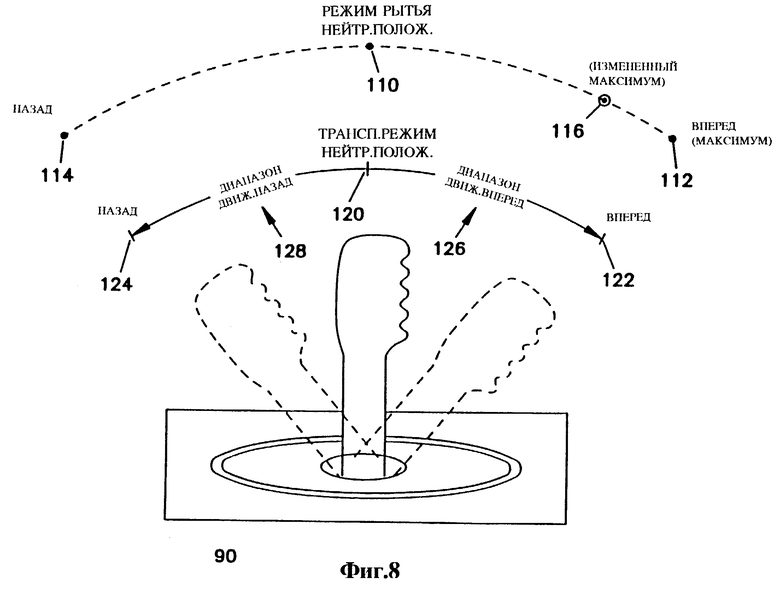
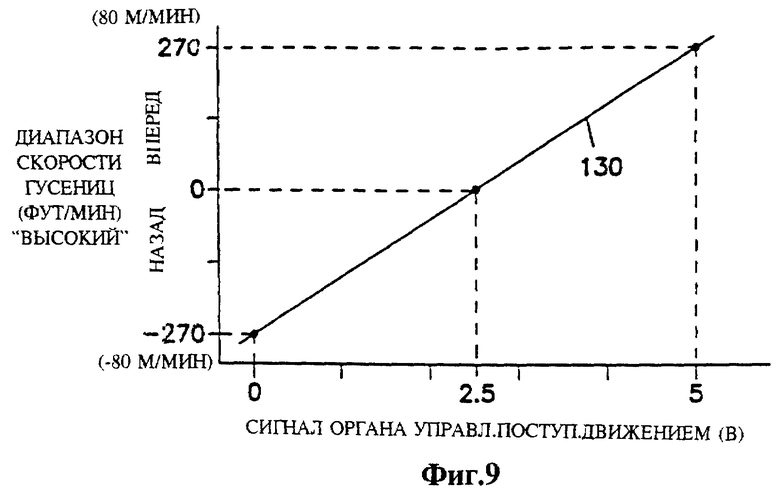
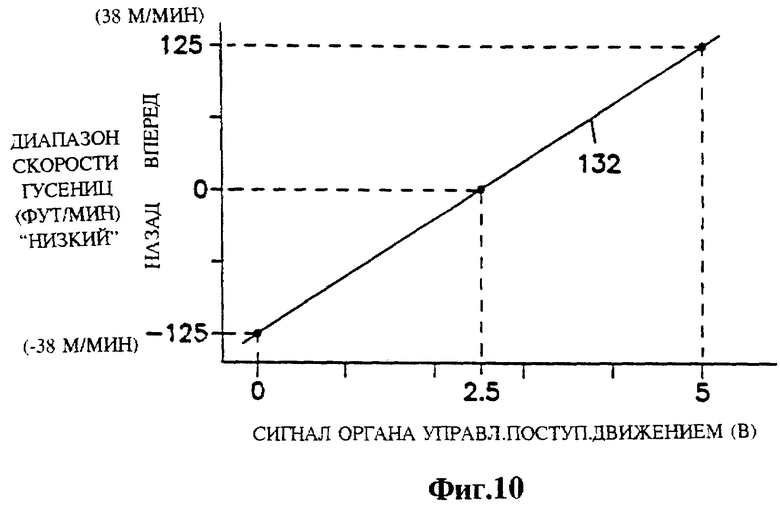
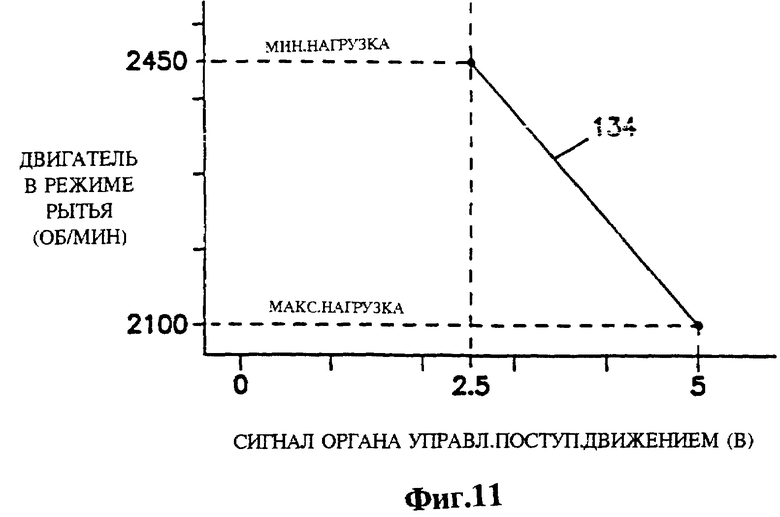
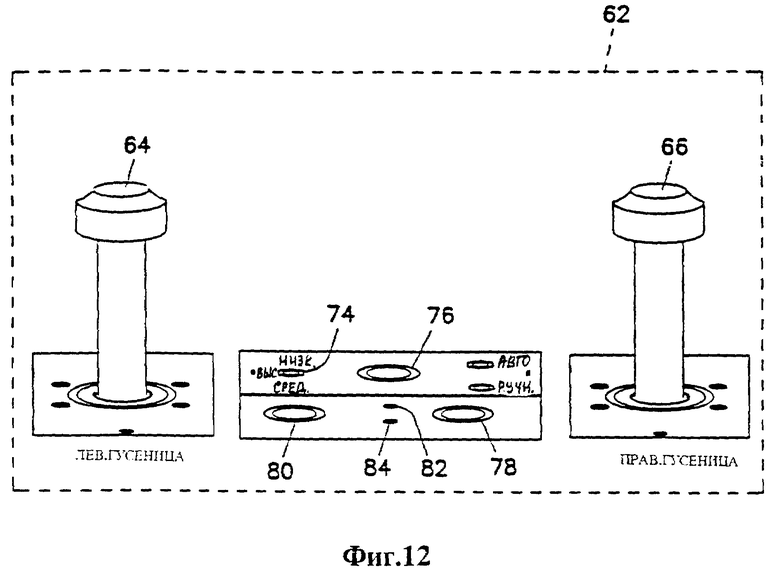
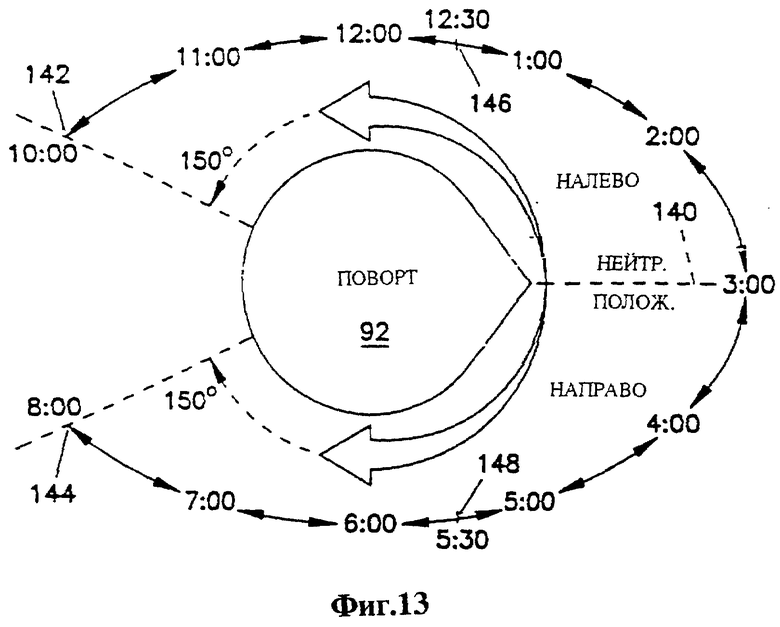
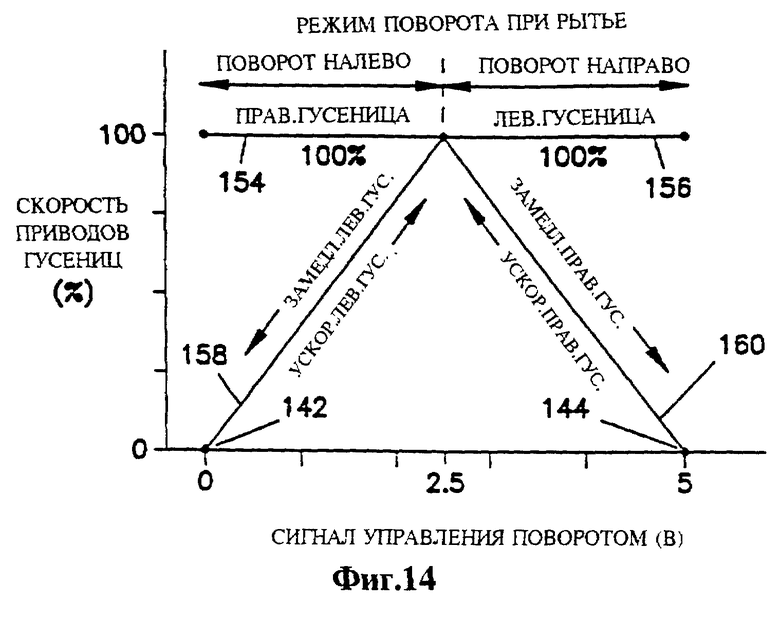
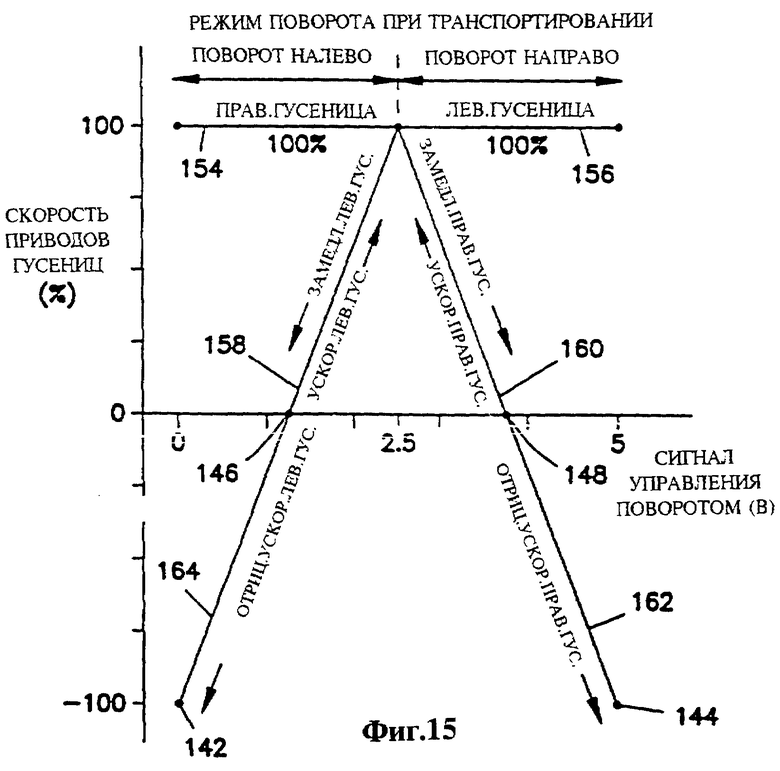
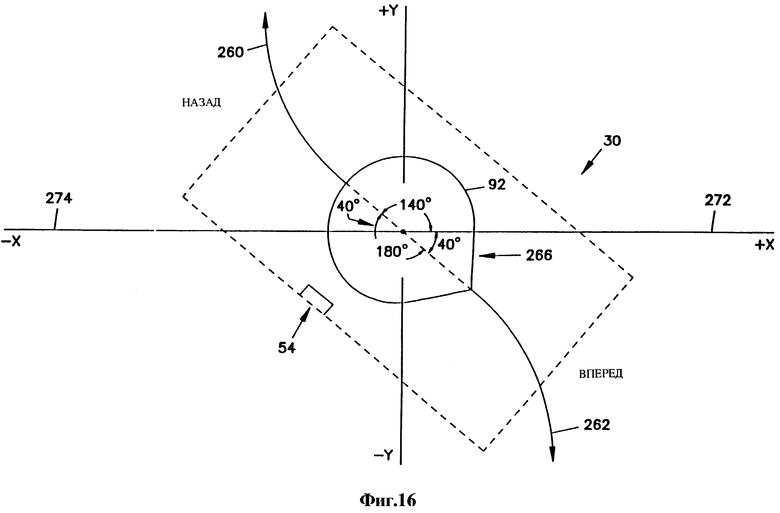
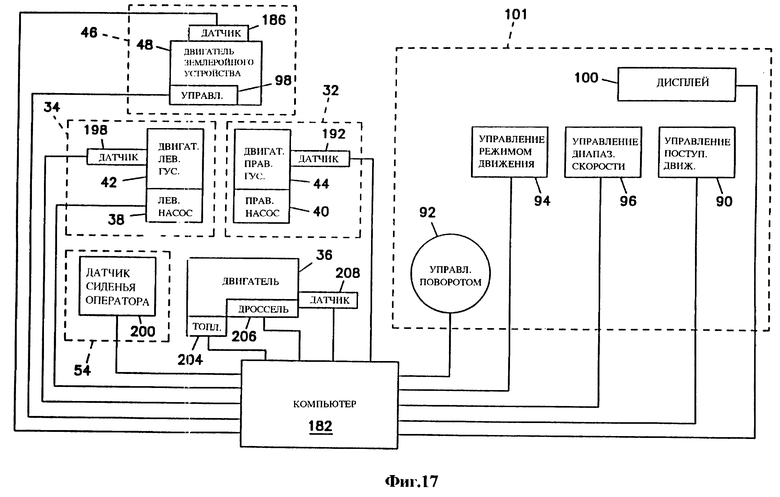
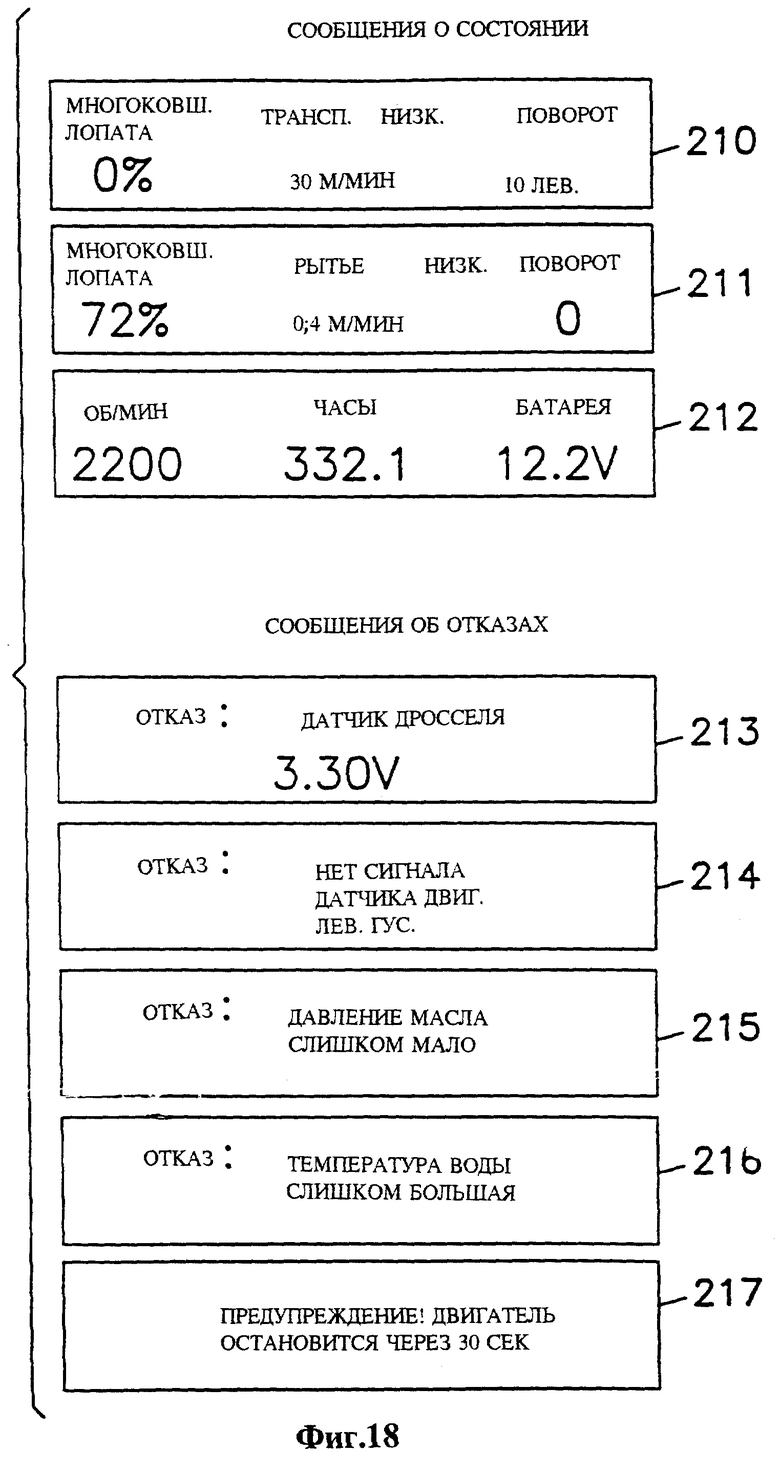
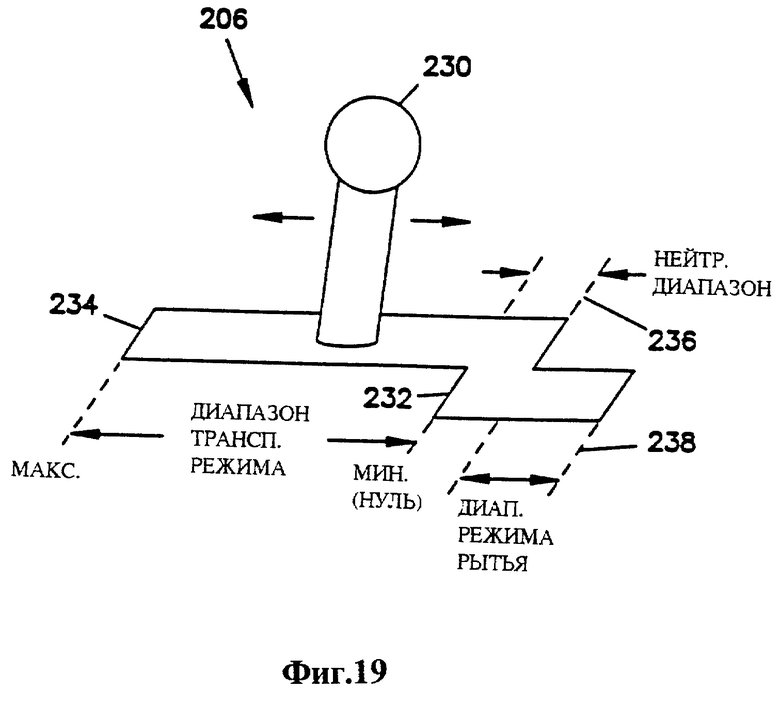
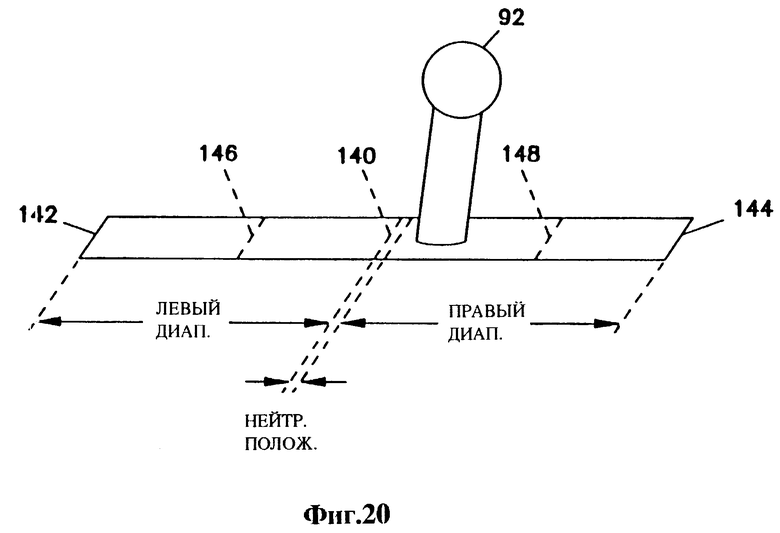
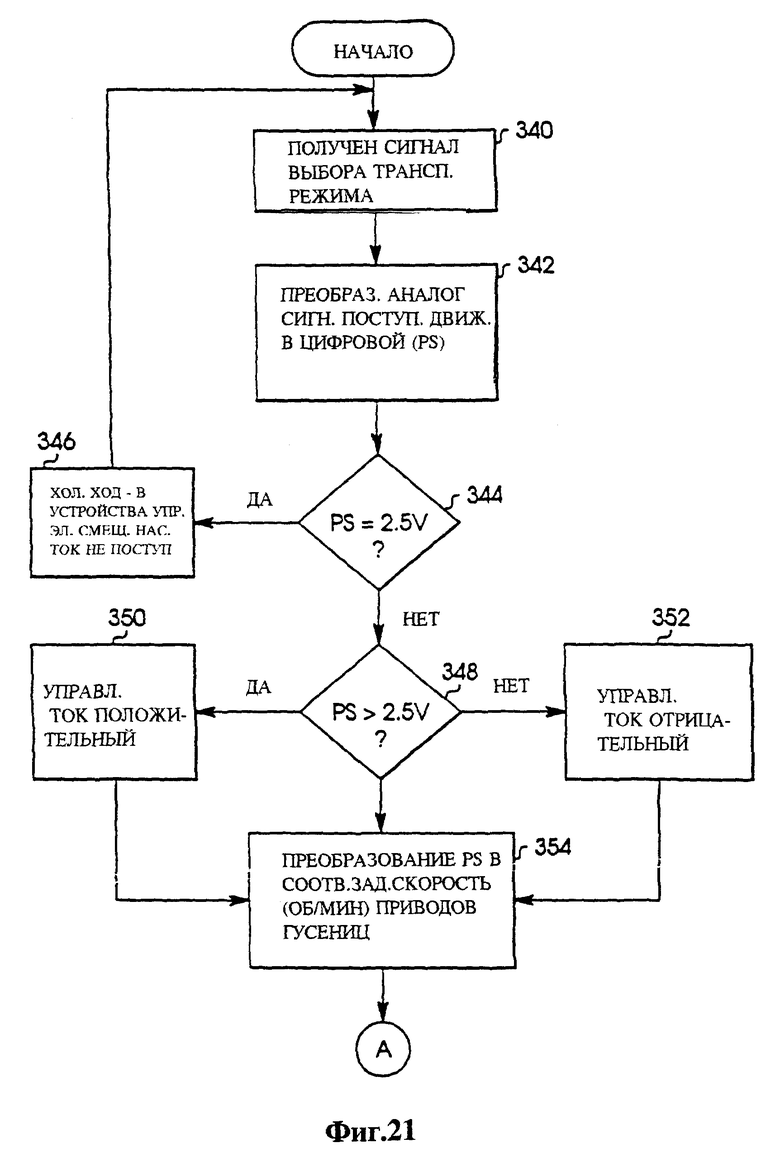
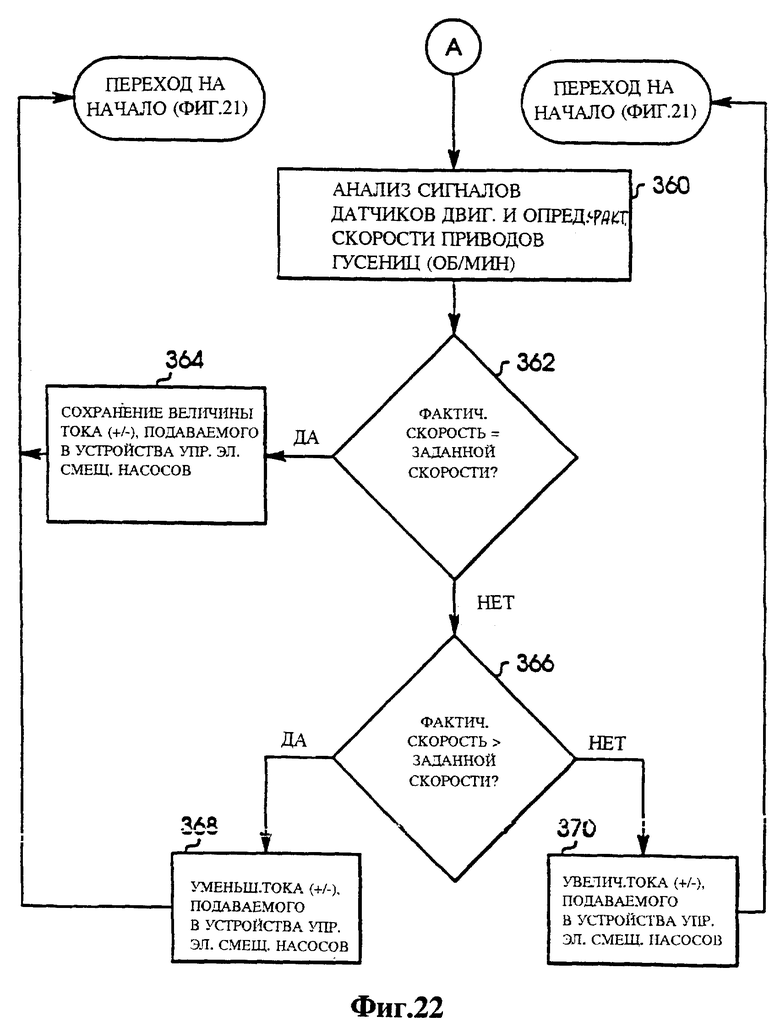
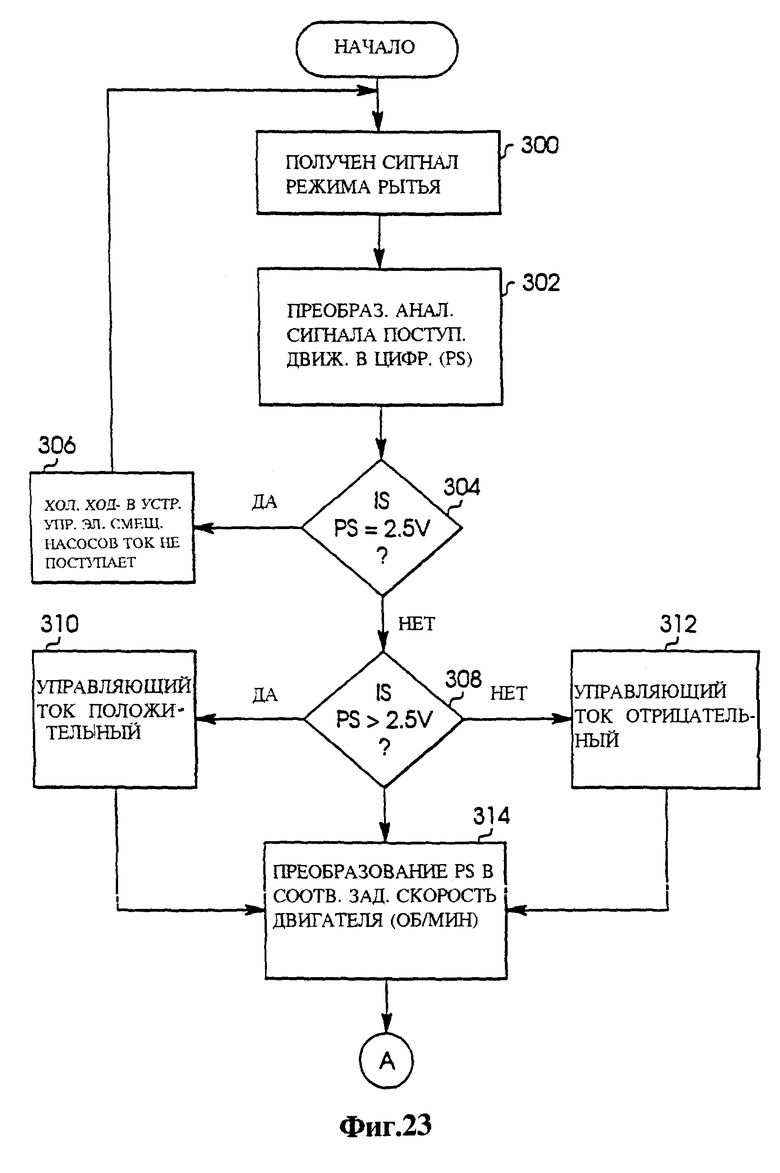
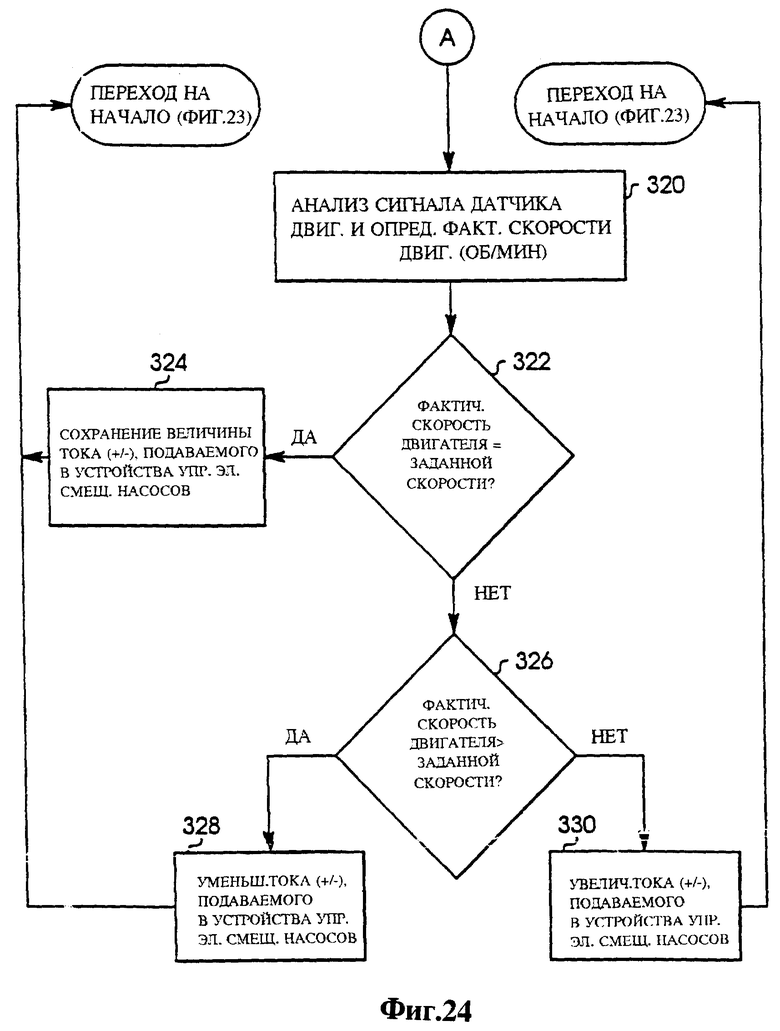
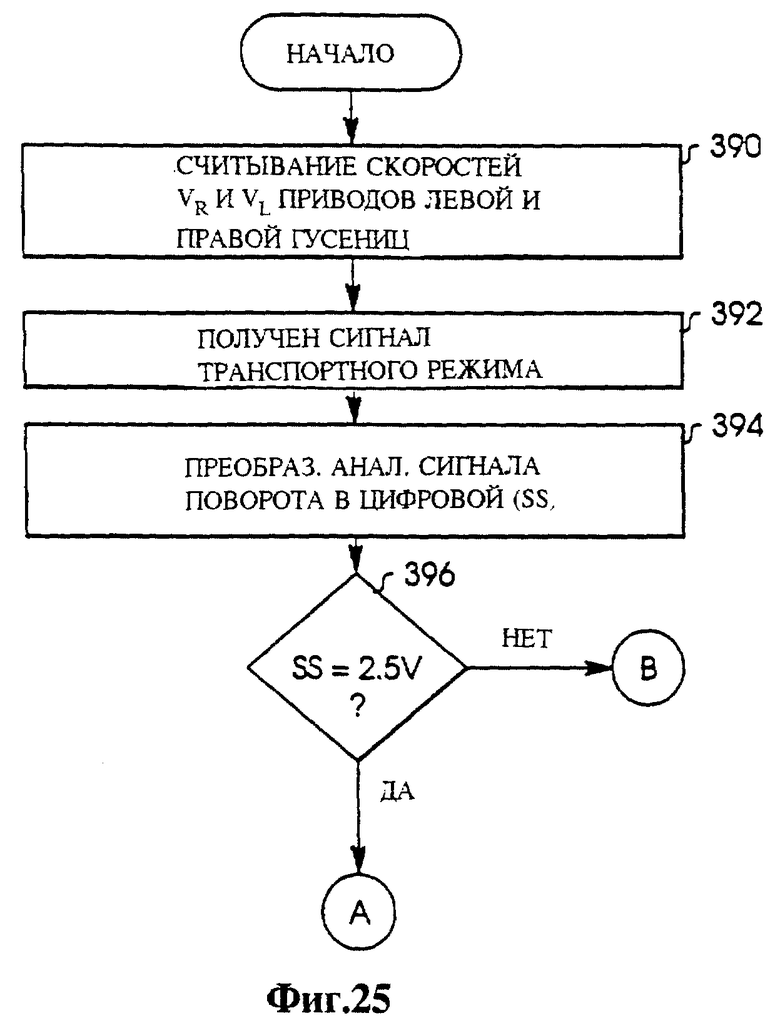
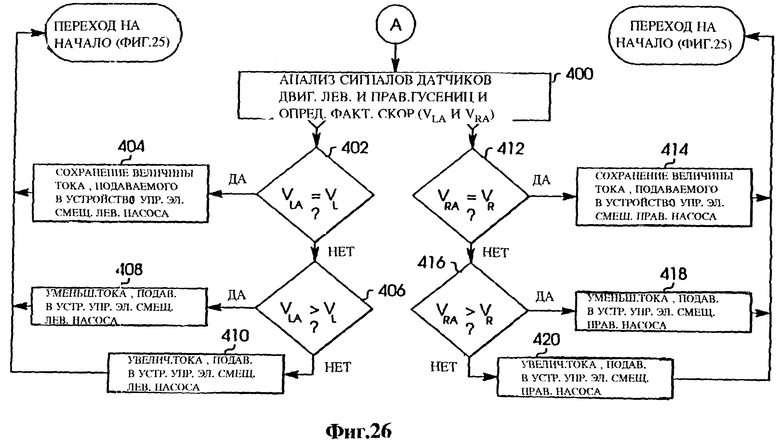
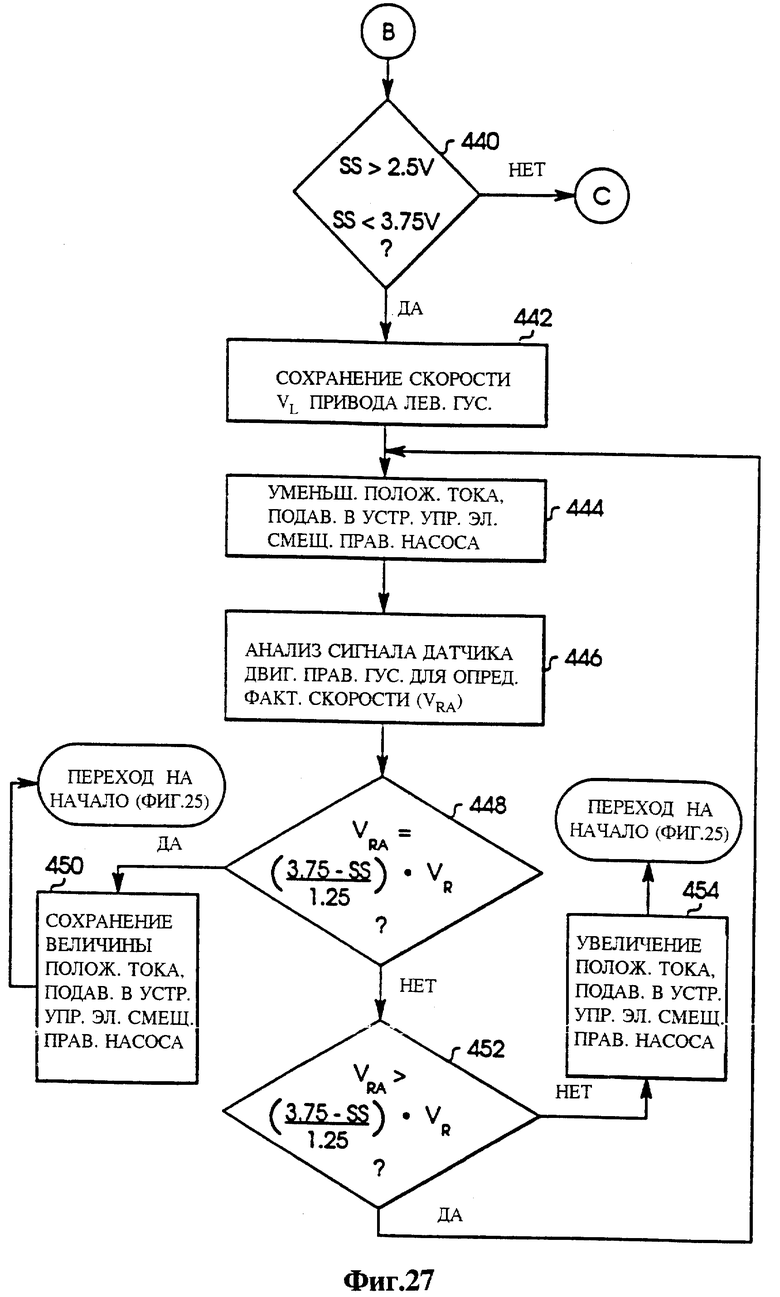
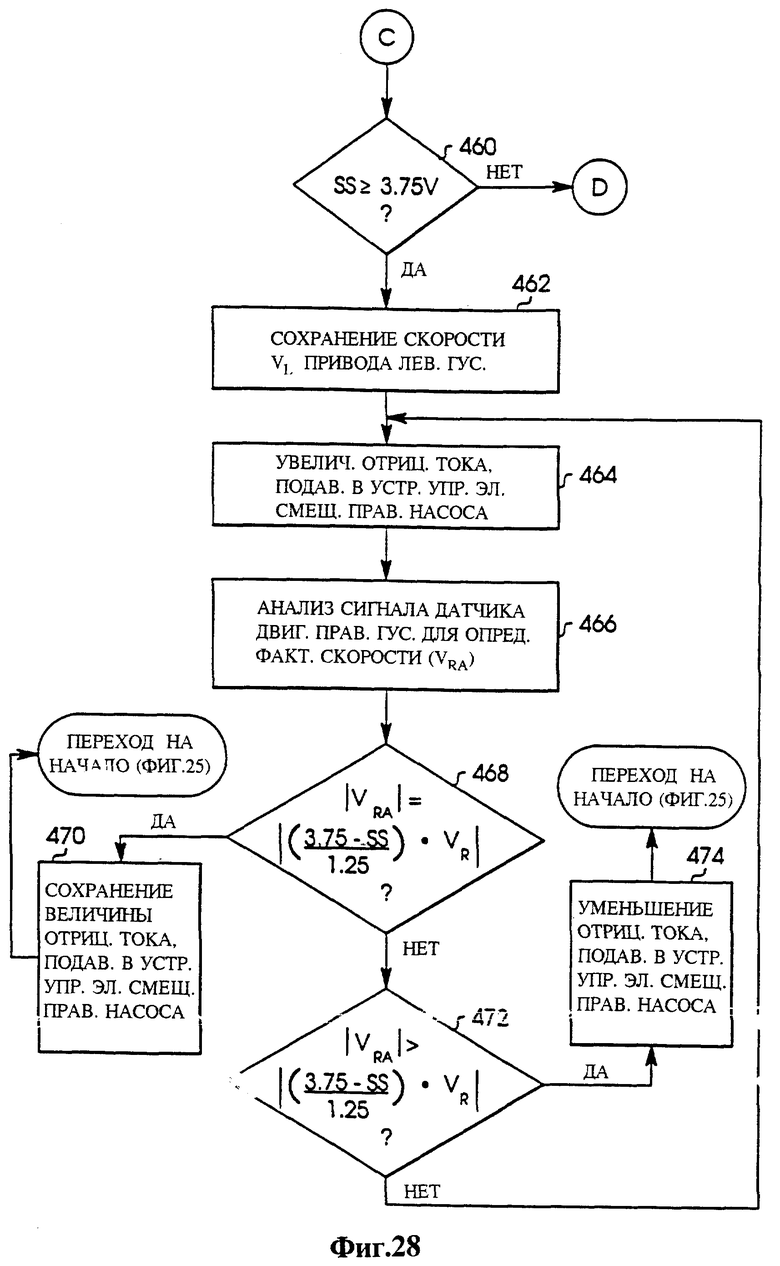
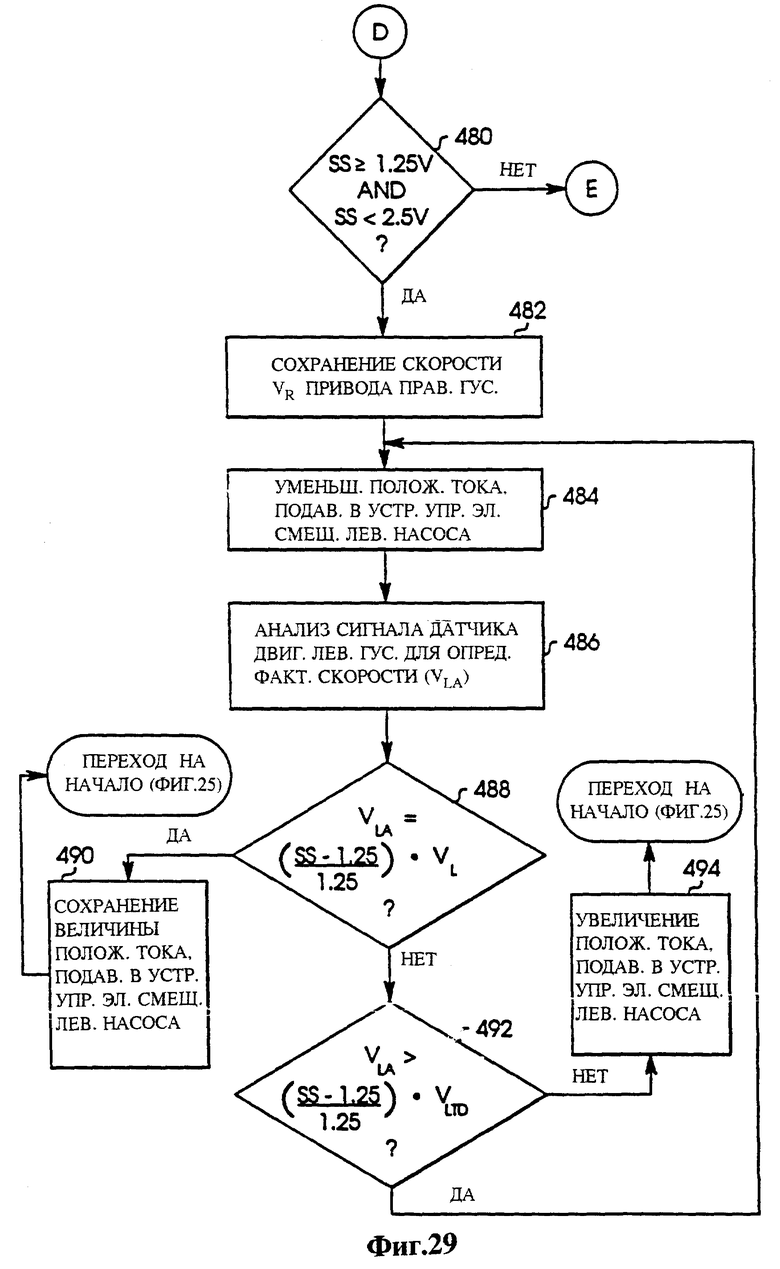
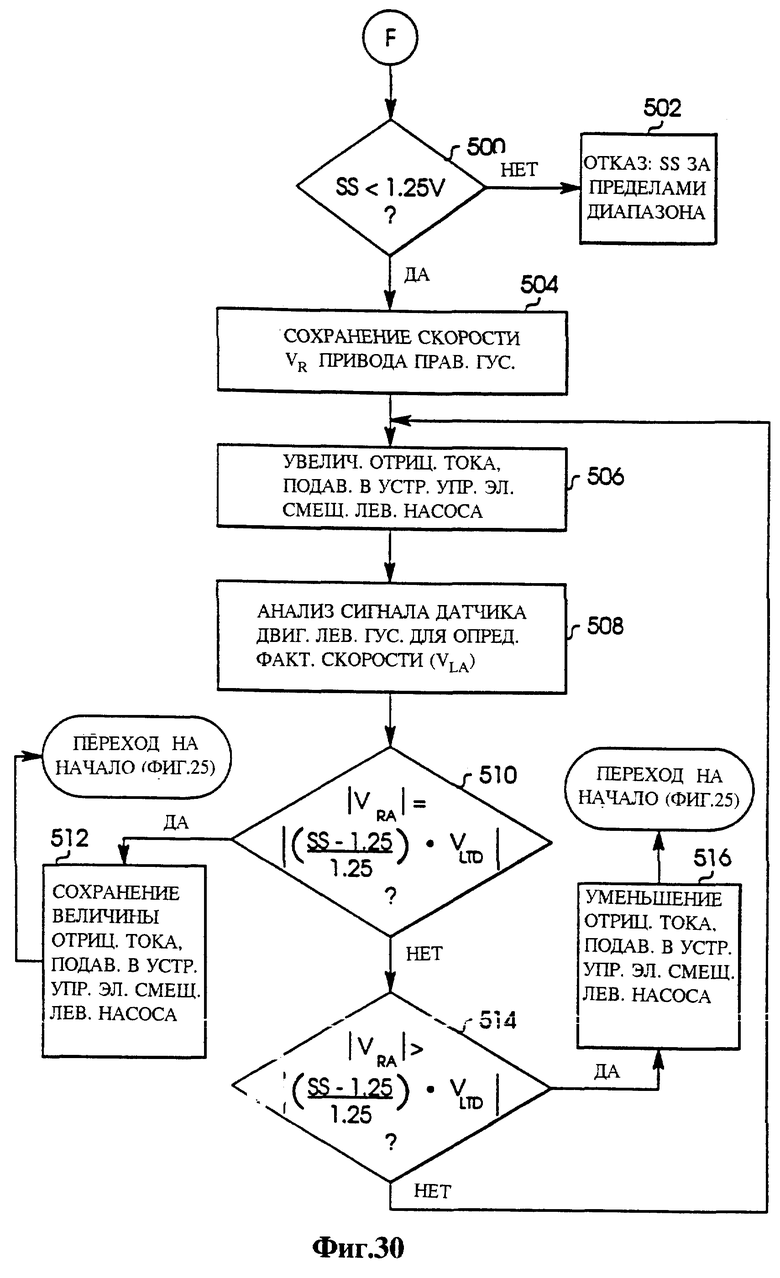
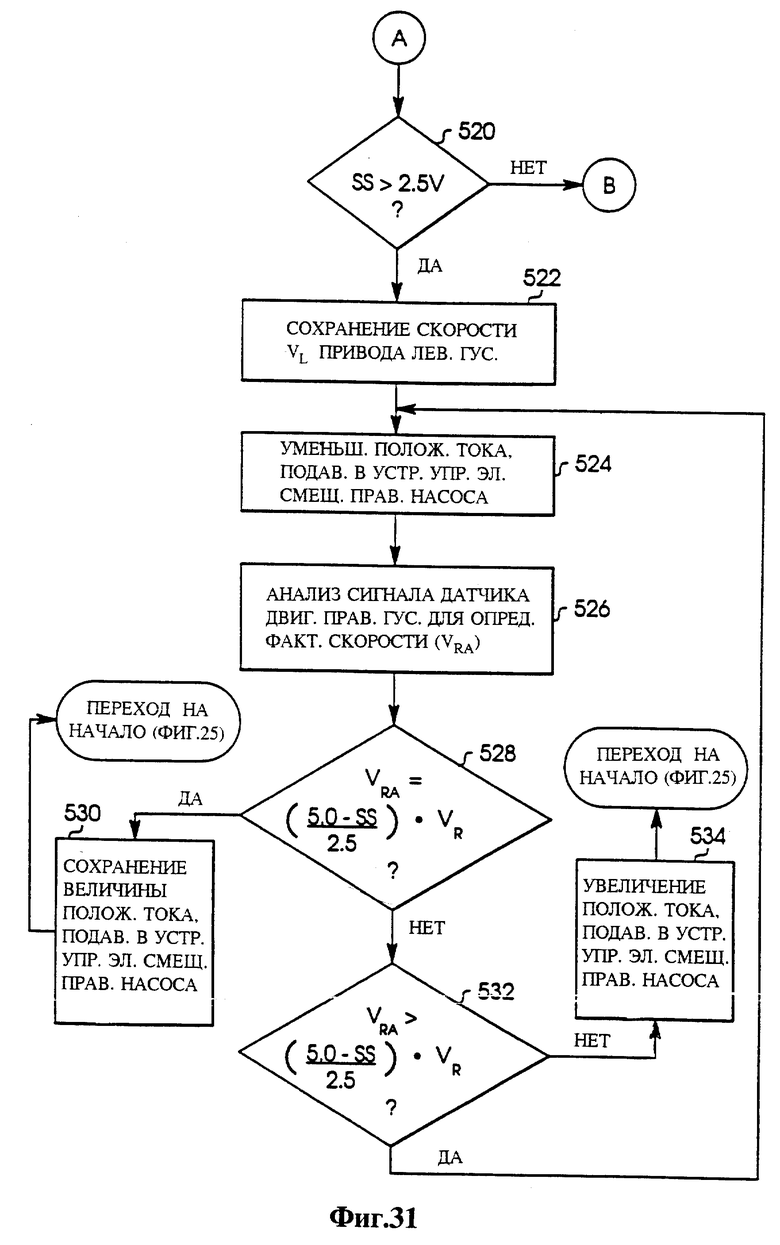
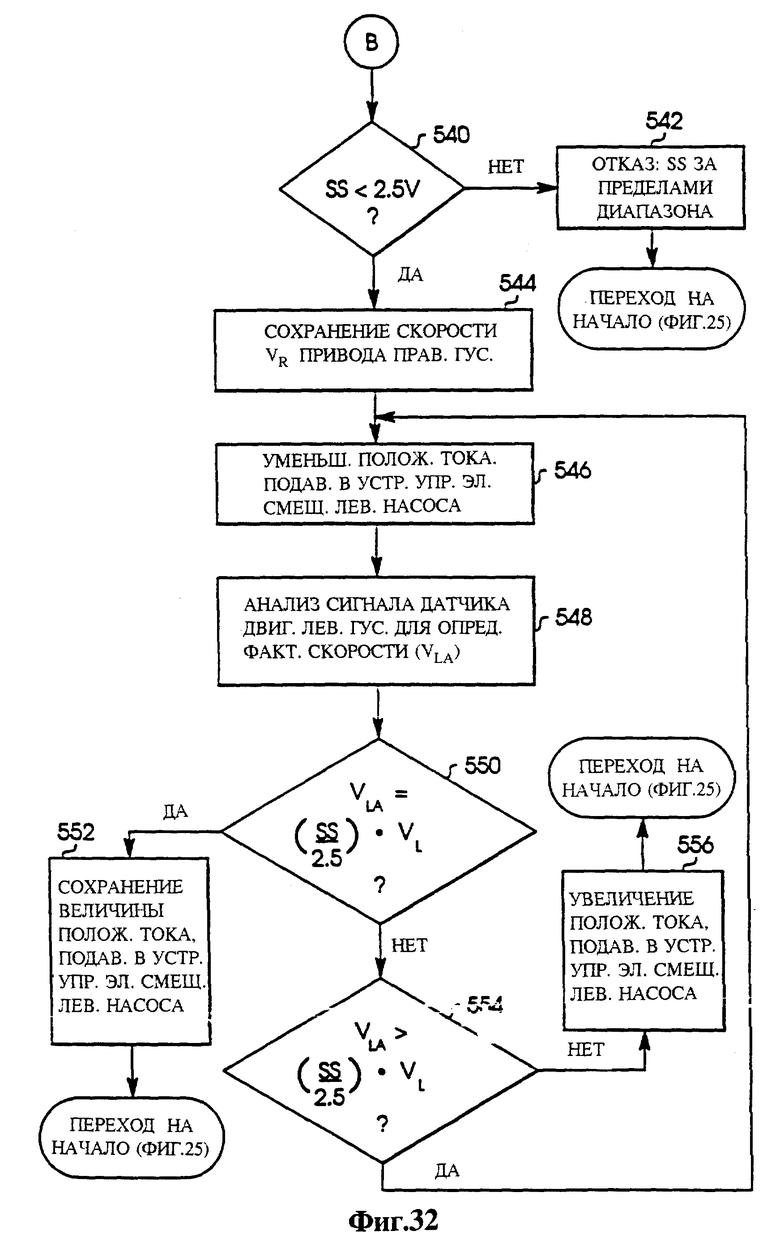
Изобретение относится к системам и способам управления гусеничными траншейными экскаваторами. В системе и способе управления гусеничным траншейным экскаватором предусмотрены органы многорежимного управления поступательным движением и поворотом, которые осуществляют несколько функций в зависимости от выбора одного из нескольких режимов работы. Компьютер в ответ на сигналы от этих органов управления изменяет функции органов многорежимного управления поступательным движением и поворотом в зависимости от выбранного режима работы и координирует тягу двигателя и приводов левой и правой гусениц экскаватора. Во время работы экскаватора дисплей выдает оператору информацию о состоянии экскаватора, отказах и другую информацию. Контролируется присутствие оператора в зоне управления экскаватором. При обнаружении, что оператор покинул зону управления, выемка грунта и работа экскаватора прекращаются. При обнаружении одного или нескольких серьезных нарушений в работе предпочтительно происходит автоматическое выключение двигателя. Технический результат заключается в том, что изобретение позволяет упростить управление экскаватором, сократить время на обучение оператора и обеспечить оператора оперативной и диагностической информацией, касающейся безопасности работы. 2 с. и 7 з.п.ф-лы, 32 ил.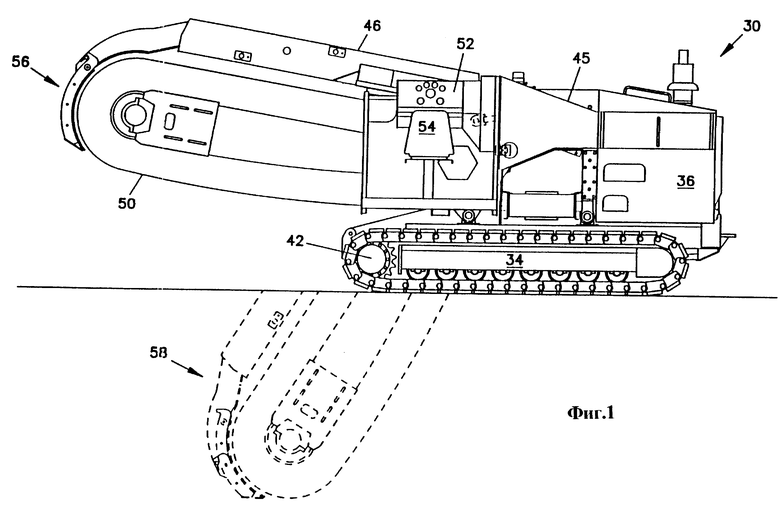
| Экономайзер | 0 |
|
SU94A1 |
| ЗЕМЛЕРЕЗНАЯ МАШИНА | 1991 |
|
RU2005853C1 |
| RU 2004699 C1 15.12.93. | |||

