Область применения изобретения
Настоящее изобретение в общем имеет отношение к области землеройных работ, а более конкретно, к имеющему множество рабочих режимов управлению приведением в движение, и к системе и способу управления приведением в движение гусеничного канавокопателя.
Предпосылки к созданию изобретения
Машина для экскавации в виде гусеничного канавокопателя 30, показанного на фиг.1 и 2, типично содержит двигатель 36, соединенный с приводом левой гусеницы 32 и с приводом правой гусеницы 34, которые совместно образуют участок 45 тягача гусеничного канавокопателя 30. Приспособление 46, обычно соединенное с задней частью участка 45 тягача, типично осуществляет специфический тип землеройной работы.
Цепь 50 канавокопателя часто используют для рытья относительно широких канав (траншей) с относительно высокой скоростью. Цепь 50 канавокопателя обычно остается над землей в транспортной конфигурации 56, когда канавокопатель 30 маневрирует на рабочей площадке. Во время экскавации, цепь 50 канавокопателя опускают в положение 39 ниже поверхности земли, при этом канавокопатель 30 проникает в землю и выкапывает канаву на желательной глубине и с желательной скоростью, находясь в конфигурации 58 проходки канавы.
Другим популярным приспособлением для землеройных работ является так называемое колесо 60 для прохода скальной породы, показанное на фиг.3, которое может работать аналогично цепи 50 канавокопателя. Известны также дополнительные приспособления, такие как TERRAIN LEVELER™, выпускаемые фирмой Vermeer Manufacturing Company of Pella, Iowa (США), которые также работают аналогичным образом.
Как это показано на фиг.4, орган 592 рулевого управления типично предусмотрен для управления направлением движения, а орган 590 управления приведением в движение типично предусмотрен для ограничения скорости движения гусеничного канавокопателя 30. Рычаг 506 дроссельной заслонки двигателя типично предусмотрен для ограничения частоты вращения двигателя 36. Эти органы управления позволяют оператору производить маневры гусеничного канавокопателя 30 как в транспортной конфигурации 56, так и в конфигурации 58 проходки канавы.
Некоторые известные гусеничные канавокопатели 30 снабжены многорежимной системой приведения в движение и управления гусеницами. Оператор канавокопателя выбирает режим, который лучше всего подходит для типа требующегося маневра и имеющейся рабочей среды в любой данный момент времени. В некоторых известных гусеничных канавокопателях 30, этот выбор делают за счет регулировки селекторного переключателя 594 рабочих режимов и селекторного переключателя 596 диапазона двигателя гусеницы на пульте управления оператора. Транспортное положение селекторного переключателя 594 рабочих режимов типично подходит для транспортной конфигурации 56 канавокопателя, в то время как положение проходки канавы типично подходит для конфигурации 58 проходки канавы. Селекторный переключатель 596 «высокий/низкий диапазон двигателя» типично используют для выбора относительной желательной скорости движения канавокопателя 30 по поверхности земли.
При осуществлении экскавации, установочные параметры для задания специфического диапазона и/или режима обычно определяют с учетом ряда факторов, в том числе с учетом желательной скорости проходки канавы и типа грунта, вынимаемого при экскавации. Например, установка переключателя 596 в высокий режима обычно подходит для проходки канавы в рыхлом грунте, когда гусеничный канавокопатель 30 типично работает с относительно более высокой скоростью и с более низким тяговым усилием. Более низкое тяговое усилие, создаваемое при более высокой скорости, позволяет использовать более высокий процент имеющейся мощности. При встрече с более плотным грунтом, таким как бетон, увеличивают тяговое усилие, приложенное к приспособлению 46 для проходки канавы, которое типично приводится в действие при помощи двигателя 36, что приводит к соответствующему снижению скорости гусеничного канавокопателя 30. Более высокое тяговое усилие, создаваемое при более низкой скорости, также позволяет использовать более высокий процент имеющейся мощности. Для последнего случая обычно подходит установка переключателя 596 в низкий диапазон.
Системы управления некоторых известных гусеничных канавокопателей 30 реконфигурируют за счет выбора между различными рабочими режимами и диапазонами, что изменяет зависимости между входными и выходными данными.
В машине для экскавации типа гусеничного канавокопателя типично используют один или несколько датчиков, которые контролируют различные физические параметры машины. Полученную при помощи этих датчиков информацию обычно используют как входные данные для регулировки различных функций машины, и/или для снабжения оператора информацией, типично за счет передачи преобразованного сигнала датчика на один или несколько экранов 500 или дисплеев, таких как, например, тахометр.
Обычно желательно поддерживать постоянный уровень выходной мощности двигателя 36 во время экскавации в режиме проходки канавы, что, в свою очередь, позволяет приспособлению 46 для проходки канавы работать при оптимальном уровне выходной мощности при проходке канавы. В некоторых применениях желательно поддерживать максимальный выходной уровень мощности двигателя 36. Управление гусеничным канавокопателем 30 во время экскавации описано в патенте США 5,509,220, устраняющее необходимость в том, чтобы оператор делал частые подстройки при помощи органа 590 управления приведением в движение, для того, чтобы поддерживать заданный уровень выходной мощности двигателя 36.
Предприятия-изготовители гусеничных канавокопателей стремятся к тому, чтобы снизить до минимума трудности работы гусеничного канавокопателя как в транспортном режиме, так и в режиме проходки канавы, и повысить производительность гусеничного канавокопателя в различных рабочих режимах. Настоящее изобретение позволяет удовлетворить эти потребности.
Краткое изложение изобретения
В соответствии с настоящим изобретением предлагаются система и способ управления приведением в движение гусеничного канавокопателя, который содержит многорежимный орган управления приведением в движение и рулевое управление, которые имеют множество рабочих режимов, в ответ на выбор одного из рабочих режимов гусеничного канавокопателя. В частности, в соответствии с настоящим изобретением предлагается система управления с высоким режимом проходки канавы, низким режимом проходки канавы и режимом транспортировки, которая получает сигнал обратной связи от частот вращения приводов гусениц, частоты вращения двигателя, гидравлических давлений приводов гусениц и гидравлического давления привода приспособления. Сигнал привода гусеницы при необходимости изменяют за счет обратной связи от гидравлического давления привода гусеницы или от частоты вращения привода гусеницы. Более того, сигнал привода гусеницы при необходимости изменяют за счет обратной связи от гидравлического давления привода приспособления. Регулируемые оператором установочные параметры при необходимости позволяют изменять реакцию системы управления, за счет изменения связи между сигналом привода гусеницы и гидравлическим давлением привода приспособления. Характеристики различных режимов могут быть дополнительно изменены за счет выбора различных диапазонов частоты вращения двигателя хода.
Краткое описание чертежей
На фиг.1 показан вид сбоку гусеничного канавокопателя, который содержит приспособление для проходки канав, снабженное цепью канавокопателя.
На фиг.2 показан обобщенный вид сверху гусеничного канавокопателя, который содержит привод правой гусеницы, привод левой гусеницы и привод приспособления.
На фиг.3 показан вид сбоку гусеничного канавокопателя, который содержит связанное с ним приспособление для проходки канав, снабженное колесом для скальной породы.
На фиг.4 показан вид спереди известного пульта управления гусеничного канавокопателя, который содержит орган управления приведением в движение, рычаг дроссельной заслонки двигателя, рулевое управление и дисплей.
На фиг.5 показан вид в перспективе панели управления гусеничного канавокопателя, которая содержит многорежимный орган управления приведением в движение, многорежимное рулевое управление, ручку регулятора нагрузки, селекторный переключатель рабочих режимов, переключатель выбора диапазона двигателя гусеницы и дисплей с множеством кнопок навигации и выбора в меню.
На фиг.6 показан вид спереди панели управления, показанной на фиг.5.
На фиг.7 показана фрагментарно панель управления, показанная на фиг.5 и 6.
На фиг.8 показан многорежимный орган управления приведением в движение, показанный на фиг.5-7, и связанные с ним функции при работе гусеничного канавокопателя.
На фиг.9 показана графическая иллюстрация работы многорежимного рулевого управления, показанного на фиг.5-7, как в режиме транспортировки, так и в режиме проходки канавы.
На фиг.10 показана графическая иллюстрация характеристик управления приводом левой и правой гусеницы, для выбора направления движения (поворота) гусеничного канавокопателя, работающего в одном из режимов проходки канавы, когда используют многорежимное рулевое управление, показанное на фиг.5, 6, 7 и 9.
На фиг.11 показана графическая иллюстрация характеристик управления приводом левой и правой гусеницы гусеничного канавокопателя, работающего в режиме транспортировки, когда используют многорежимное рулевое управление, показанное на фиг.5, 6, 7 и 9.
На фиг.12 показана блок-схема компьютерной схемы для управления приведением в движение и рулевым механизмом гусеничного канавокопателя с использованием многорежимного управления приведением в движение и многорежимного рулевого управления, ручки регулятора нагрузки, селекторного переключателя рабочих режимов, переключателя выбора диапазона двигателя гусеницы и дисплея с кнопками навигации и выбора в меню.
На фиг.12А показана блок-схема с примерным списком параметров, связанных с множеством уставок (настроек) оператора, использованных в компьютерной схеме, показанной на фиг.12.
На фиг.12В показана блок-схема с примерным списком параметров, связанных с множеством расчетное значений, вычисленных при помощи компьютерной схемы, показанной на фиг.12, и использованных в ней.
На фиг.12С показана блок-схема с примерным списком параметров, связанных с множеством предварительно заданных значений, использованных в компьютерной схеме, показанной на фиг.12.
На фиг.12D показана блок-схема с примерным списком параметров, связанных с множеством опорных значений, использованных в компьютерной схеме, показанной на фиг.12.
На фиг.13 показан график множителя нагрузки в зависимости от частоты вращения двигателя при специфической уставке, а также показан изменяемый относительный диапазон множитель нагрузки/ частота вращения двигателя, с верхней границей и нижней границей.
На фиг.14 показаны изменяемый относительный диапазон и график, показанные на фиг.13, где местоположение диапазона увеличено за счет поворота по часовой стрелки ручки регулятора нагрузки.
На фиг.15 показаны изменяемый относительный диапазон и график, показанные на фиг.13, где местоположение диапазона уменьшено за счет поворота против часовой стрелки ручки регулятора нагрузки.
На фиг.16 показан обобщенный вид блок-схемы привода правой гусеницы с использованием управления с обратной связью по давлению.
На фиг.17 показан обобщенный вид блок-схемы привода приспособления с использованием сигнала давления, передаваемого в компьютерную схему, за счет чего используют обратную связь по давлению приспособления для управления приводами гусениц.
На фиг.18 показан способ управления для вычисления границ относительного диапазона множитель нагрузки/ частота вращения двигателя, показанного на фиг.13-15, при заданных входных параметрах тока.
На фиг.19 показан способ управления для вычисления множителя нагрузки, показанного на фиг.13-15, при заданных входных параметрах тока.
На фиг.20 показан способ управления для вычисления поправки обратной связи по давлению от приспособления при заданных входных параметрах тока, в котором используют установку в положение обратной связи по давлению от приспособления.
На фиг.21 показан способ управления для вычисления сигнала привода левой гусеницы и сигнала привода правой гусеницы при заданных входных параметрах тока в низком режиме проходки канавы.
На фиг.22 показан способ управления для определения и выбора соответствующего параметра управления двигателем гусеницы при установке селекторного переключателя диапазона двигателя гусеницы в токовый режим.
На фиг.23 показан способ управления для вычисления ошибки рассогласования частоты вращения привода правой гусеницы и ошибки рассогласования частоты вращения привода левой гусеницы при заданных входных параметрах тока.
На фиг.24 показан способ управления для вычисления ошибки рассогласования давления привода правой гусеницы и ошибки рассогласования давления привода левой гусеницы при заданных входных параметрах тока.
На фиг.25 показан способ управления для определения и выбора соответствующей ошибки рассогласования привода правой гусеницы и соответствующей ошибки рассогласования привода левой гусеницы при установке селектора обратной связи привода гусеницы в токовый режим.
На фиг.26 показан способ управления для вычисления поправочного коэффициента привода правой гусеницы и поправочного коэффициента привода левой гусеницы при заданных входных параметрах тока.
На фиг.27 показан способ управления для вычисления сигналов приводов левой и правой гусениц при заданных входных параметрах тока в высоком режиме проходки канавы.
На фиг.28 показан способ управления для вычисления сигналов приводов левой и правой гусениц при заданных входных параметрах тока в транспортном режиме.
На фиг.29 показан график зависимости поправочного коэффициента приспособления от давления привода приспособления при специфической уставке и показан изменяемый относительный диапазон поправочный коэффициент приспособления/ давление привода приспособления, с верхней границей и нижней границей.
Подробное описание изобретения
Как уже было указано выше, настоящее изобретение имеет отношение к созданию системы и способа управления приведением в движение и направлением движения гусеничного канавокопателя 30. В описании настоящего изобретения содержатся множество признаков и режимов системы и способа управления приведением в движение и направлением движения, что позволяет оценить различные функции и параметры системы.
В предпочтительной конфигурации, система управления содержит компьютерную схему 182, которая позволяет вычислять различные параметры, координировать различные функции и обеспечивать связь с оператором. В примерной конфигурации, компьютерная схема 182 содержит множество контроллеров и других компонентов в соответствии со стандартом PLUS+1™ фирмы Sauer-Danfoss, Inc. of Ames, Iowa (США). Примерные модули контроллера содержат модуль контроллера МС050-010, модуль контроллера МС050-020, входной модуль 1X024-010 и выходной модуль 0X024-010, которые все могут быть закуплены на фирме Sauer-Danfoss, Inc. of Ames, Iowa (США). В примерной конфигурации, различные параметры хранят в долговременной (энергонезависимой) памяти, а программы хранят в EPROM (СППЗУ).
Обратимся теперь к рассмотрению чертежей, а более конкретно, к рассмотрению фиг.5 и 6, на которых показана панель 52 управления оператора, которая содержит многорежимный орган 90 управления приведением в движение, многорежимное рулевое управление 92, селекторный переключатель 94 рабочих режимов, ручку 380 регулятора нагрузки, рычаг 206 дроссельной заслонки двигателя, селекторный переключатель 96 диапазона двигателя гусеницы и дисплей 100 оператора с множеством кнопок 102 навигации и выбора в программном меню. Органы управления и функциональные клавиши панели 52 управления оператора служат для приведения в действие и выбора конфигурации гусеничного канавокопателя, такого как гусеничный канавокопатель 30. Более конкретно, эти органы управления приводят в действие гусеничный канавокопатель 30 за счет регулирования привода 32 левой гусеницы и привода 34 правой гусеницы. В соответствии с одним из вариантов, орган 90 управления приведением в движение, рулевое управление 92, селекторный переключатель 94 рабочих режимов, селекторный переключатель 96 диапазона двигателя гусеницы и установочные параметры программного меню работают совместно для того, чтобы эффективно приводить в движение и направлять (поворачивать) гусеничный канавокопатель 30 в одном из множества рабочих режимов. Орган 90 управления приведением в движение и рулевое управление 92 преимущественно представляют собой многорежимные органы управления, причем каждый из органов 90 и 92 управления осуществляет множество функций в зависимости от выбранного рабочего режима, диапазона двигателя хода и установочных параметров программного меню системы управления.
Одним из важных преимуществ схемы управления, показанной на фиг.5-7, является развязка или разделение функций рулевого управления (управления направлением движения) от функций управления приведением в движение (управления тягой), при управлении гусеничным канавокопателем 30. Приведением в движение приводов левой и правой гусениц 32 и 34 управляют при помощи органа 90 управления приведением в движение, в то время как направлением движения гусеничного канавокопателя 30 независимо управляют при помощи рулевого управления 92. Управление гусеничным канавокопателем 30 при работе в любом из множества рабочих режимов существенно упрощается за счет использования многорежимных органа управления приведением в движение и рулевого управления 90 и 92.
Обратимся теперь к рассмотрению фиг.7 и 8, на которых показан многорежимный орган 90 управления приведением в движение гусеничного канавокопателя 30 в одном из множества рабочих режимов. Орган 90 управления приведением в движение имеет нейтральное положение 120, положение 122 максимально вперед, положение 124 максимально назад и соответствующие диапазоны 126 и 128 положений вперед и назад. В качестве примера (но без ограничения) можно указать, что многорежимный орган 90 управления приведением в движение преимущественно работает в различных транспортных режимах и различных режимах проходки канавы. Выбор специфического транспортного режима или режима проходки канавы преимущественно определяется состоянием селекторного переключателя 94 рабочих режимов, который, совместно с селекторным переключателем 96 диапазона двигателя гусеницы и установочными параметрами программного меню системы управления, изменяет режимы органа 90 управления приведением в движение.
В примерном варианте, показанном на фиг.7, гусеничный канавокопатель 30 работает в режиме транспортировки, который преимущественно задают за счет установки селекторного переключателя 94 рабочих режимов в положение режима транспортировки. Приведение в движение, вперед и назад, гусеничного канавокопателя 30 преимущественно зависит от положения органа 90 управления приведением в движение между передним и задним максимальными положениями 122 и 124. Орган 90 управления приведением в движение вырабатывает сигнал 309 приведения в движение (см. фиг.12), который преимущественно пропорционален перемещению органа 90 управления приведением в движение в переднем или заднем направлении относительно нейтрального положения 120. Более того, сигнал приведения в движение преимущественно отображает заданную частоту вращения двигателя привода гусеницы, измеренную в числе оборотов в минуту (об/мин). При необходимости, характеристики органа управления приведением в движение могут быть дополнительно изменены при помощи селекторного переключателя 96 диапазона двигателя хода и установочных параметров программного меню системы управления.
В соответствии с другими вариантами, сигнал приведения в движение может отображать заданное давление насоса привода гусеницы, измеренное в фунтах на квадратный дюйм (psi).
Многорежимное рулевое управление 92, показанный на фиг.7 и 9, выполнено с возможностью работы во множестве режимов, причем характеристики его работы в специфическом режиме преимущественно могут быть изменены за счет выбора одного из множества рабочих режимов, задаваемых при помощи селекторного переключателя 94 рабочих режимов. При необходимости, характеристики рулевого управления могут быть дополнительно изменены при помощи селекторного переключателя 96 диапазона двигателя хода и установочных параметров программного меню системы управления. В соответствии с одним из вариантов, рулевое управление 92 выполнено в виде содержащего потенциометр поворотного органа управления, имеющего нейтральное или нулевое положение 140 (см. фиг.9) и диапазон левых и правых положений, имеющих максимальное левое положение 142 и максимальное правое положение 144. В соответствии с другим вариантом, рулевое управление 92 содержит рулевое колесо, имеющее главным образом такие же положения. Рулевое управление 92 преимущественно имеет поворот на 150 градусов влево и на 150 градусов вправо относительно нулевого положения 140. В соответствии с еще одним вариантом, рулевое управление 92 представляет собой поворотный позиционный датчик. Альтернативно, рулевое управление 92 может иметь другие диапазоны поворота. Величина поворота (канавокопателя) влево и вправо преимущественно пропорционально степени поворота рулевого управления 92 от нулевого положения 140 в левом и правом направлениях, соответственно.
Рулевое управление 92 управляет направлением перемещения (поворотом) гусеничного канавокопателя 30 преимущественно за счет снижения скорости перемещения только одной гусеницы 34 или 32 относительно другой гусеницы 32 или 34. В соответствии с одним из вариантов настоящего изобретения, эта скорость перемещения гусеницы при снижении становится равной нулю в соответствующем правом или левом положении 149 или 147 в одном из режимов проходки канавы. Перемещение в максимальное правое или левое положения 144 или 142 приводит к снижению скорости несколько ниже нуля (отрицательная скорость), как это показано на фиг.10. Эта несколько отрицательная скорость позволяет соответствующей гусенице 34 или 32 сопротивляться волочению вперед за счет противоположной гусеницы 32 или 34. При нахождении канавокопателя в транспортном режиме, скорость при снижении доходит до нулевой точки 148 и до нулевой точки 146 ориентировочно посредине соответствующих левого и правого диапазонов управления. Установка в положение за этой средней точкой 148 или 146 изменяет направление вращения соответствующего привода правой или левой гусеницы 34 или 32 и увеличивает скорость перемещения гусеницы в обратном направлении. Максимальная скорость перемещения гусеницы в обратном направлении, которую получают соответственно на правой 144 или левой 142 границах диапазона, равна по величине скорости перемещения противоположной гусеницы, как это показано на фиг.11. Полоса 150 вращения в обратном направлении на фиг.10 и 11 образована в областях, в которых приводы гусениц 32 и 34 движутся в противоположных направлениях.
В соответствии с одним из вариантов настоящего изобретения, задача снижения частоты вращения только одного привода гусеницы 32 или 34 относительно другого привода гусеницы 34 или 32 решена за счет выработки управляющего сигнала 92L масштабирования привода левой гусеницы раздельно от управляющего сигнала 92R масштабирования привода правой гусеницы. Более того, характеристики управляющих сигналов 92L и 92R могут быть изменены при помощи селекторного переключателя 94 рабочих режимов, как это показано на фиг.10 и 11.
Вне зависимости от рабочего режима, поворот гусеничного канавокопателя 30 в правом направлении производят за счет поворота рулевого управления 92 от нулевого положения 140 в правом направлении, к максимальному правому положению 144. Когда рулевое управление 92 поворачивают в правом направлении, управляющий сигнал 92L масштабирования привода левой гусеницы 32 поддерживают на уровне 100%, как это показано линиями 156 на фиг.10 и 11, в то время как управляющий сигнал 92R масштабирования привода правой гусеницы 34 уменьшают, как это показано линиями 160. Аналогично, поворот гусеничного канавокопателя 30 в левом направлении производят за счет поворота рулевого управления 92 в левом направлении. Максимальный левый поворот, например, характеризуется тем, что управляющий сигнал 92R масштабирования привода правой гусеницы 34 поддерживают на уровне 100%, как это показано линиями 154, в то время как управляющий сигнал 92L масштабирования привода левой гусеницы 32 снижают несколько ниже 0% в режимах проходки канавы и снижают до -100% в режиме транспортировки, как это показано точками 142 на линиях 158.
Несмотря на то, что зависимости между положением рулевого управления 92 и управляющими сигналами 92R и 92L масштабирования показаны кусочно линейными на фиг.10 и 11, следует иметь в виду, что в других вариантах настоящего изобретения могут быть использованы нелинейные зависимости.
Обратимся теперь к рассмотрению фиг.12, на которой показано, что привод левой гусеницы 32 типично содержит насос 40 левой гусеницы, соединенный с двигателем 44 левой гусеницы, а привод правой гусеницы 34 типично содержит насос 38 правой гусеницы, соединенный с двигателем 42 правой гусеницы. Датчики 198 и 192 частоты вращения двигателей левой и правой гусениц преимущественно подключены соответственно к двигателям 44 и 42 приводов левой и правой гусениц. Насосы 40 и 38 приводов левой и правой гусениц, приводимые в действие при помощи двигателя 36, преимущественно регулируют поток рабочей жидкости (масла), поступающий в двигатели 44 и 42 левой и правой гусениц, в ответ на поступление сигнала 318 управления насосом левой гусеницы и сигнала 319 управления насосом правой гусеницы, соответственно. Это, в свою очередь, обеспечивает приведение в движение приводов левой и правой гусениц 32 и 34.
В соответствии с предпочтительным вариантом, приспособление 46 типично соединено с задней частью участка 45 тягача гусеничного канавокопателя 30. Известны различные приспособления 46, каждое из которых специализировано для проведения специфического типа операции экскавации. На фиг.1 показан тип приспособления 46, в котором используют цепь 50 канавокопателя, а на фиг.3 показано приспособление 46, в котором используют колесо 60 для скальной породы. Известны также и другие приспособления, такие как TERRAIN LEVELER™, выпускаемые фирмой Vermeer Manufacturing Company of Pella, Iowa (США).
При маневрировании канавокопателя между рабочими площадками, приспособление 46 поднято выше уровня поверхности земли, что приводит к транспортной конфигурации 56 гусеничного канавокопателя 30. Для осуществления экскавации, приспособление 46 опускают ниже уровня поверхности земли, что приводит к конфигурации 58 проходки канавы.
Экскавацию осуществляют при подаче гидравлической энергии на приспособление 46 и приводы гусениц 32 и/или 34, когда гусеничный канавокопатель 30 находится в конфигурации 58 проходки канавы. Эта энергия вызывает перемещение активного участка приспособления 46, то есть цепи 50 канавокопателя или колеса 60 скальной породы. При необходимости, на активном участке приспособления 46 могут быть установлены инструменты (орудия) для экскавации, изготовленные из подходящего твердого материала, такие как зубья из карбида металла или другие режущие инструменты. Гидравлическую энергию подают на приводы гусениц 32 и/или 34 что приводит гусеничный канавокопатель 30 в движение для продвижения подземного участка приспособления 46 в нетронутый грунт. При этом активный участок приспособления 46 и установленные на нем инструменты входят в зацепление с грунтом, разрушают его и уносят из зоны экскавации.
Как это показано на фиг.12, приспособление 46 дополнительно содержит двигатель 48 приспособления, преимущественно получающий энергию от насоса 49 приспособления. Датчик 186 частоты вращения преимущественно подключен к двигателю 48 приспособления и вырабатывает сигнал 324 частоты вращения приспособления. Насос 49 приспособления, который приводится в действие при помощи (основного) двигателя 36, преимущественно регулирует поток рабочей жидкости (масла) в двигатель 48 приспособления, который, в свою очередь, приводит в действие приспособление 46. Насосом 49 приспособления преимущественно управляют при помощи команд, передаваемых при помощи сигнала 322 управления насосом приспособления, вырабатываемого компьютерной схемой 182, как это показано на фиг.12. Альтернативно, управление приспособлением может быть осуществлено за счет управления двигателем 48 приспособления. Один или несколько двигателей 48 приспособления и один или несколько насосов 49 приспособления могут быть использованы вместе в параллельном гидростатическом контуре.
В соответствии с некоторыми вариантами настоящего изобретения, работу двигателя 44 левой гусеницы, двигателя 42 правой гусеницы и двигателя 48 приспособления контролируют при помощи соответствующих датчиков 198, 192 и 186 частоты вращения. Выходные сигналы датчиков 198, 192 и 186 передают в компьютерную схему 182. В соответствии с некоторыми вариантами настоящего изобретения, рабочее гидравлическое давление, созданное между двигателем 44 левой гусеницы, двигателем 42 правой гусеницы и двигателем 48 приспособления и их соответствующими насосами 40, 38 и 49, контролируют при помощи соответствующих датчиков давления, вырабатывающих соответственно сигнал 320 гидростатического давления левой гусеницы, сигнал 321 гидростатического давления правой гусеницы и сигнал 323 гидростатического давления приспособления, передаваемые в компьютерную схему 182.
В соответствии с предпочтительным вариантом осуществления настоящего изобретения, различные сигналы и установочные параметры используют в системе управления для осуществления различных задач и функций. В соответствии с настоящим изобретением эти переменные величины системы управления обычно могут быть подразделены на семь основных категорий. Эти категории, которые могут перекрывать друг друга, введены для систематизации описания настоящего изобретения. Эти и другие элементы настоящего изобретения также могут быть классифицированы в соответствии с другими способами, так что использованный способ классификации не следует толковать как вносящий какие-либо ограничения в настоящее изобретение.
В частности, описанные ниже различные сигналы и установочные параметры могут быть использованы в одном или нескольких рабочих режимах. Характеристики некоторых сигналов и установочных параметров могут быть изменены в зависимости от выбранного рабочего режима, положения переключателя диапазона приведения в движение и других установочных параметров программного меню системы управления. Взаимосвязи между различными сигналами и установочными параметрами и характеристиками этих сигналов и установочных параметров придают гибкость системе управления и поэтому повышают адаптируемость гусеничного канавокопателя 30 к различным видам применения.
В соответствии с некоторыми вариантами, некоторые из различных сигналов и установочных параметров 391, 392, 393 и 394 хранят в энергонезависимой памяти в компьютерной схеме 182, как это показано на фиг.12. Другие сигналы и установочные параметры могут представлять собой выходной сигнал, поступающий от рычага или ручки управления, или цифровой сигнал, поступающий от такого компонента, как двигатель 36.
Первая категория сигналов и установочных параметров системы управления содержит группу предварительно заданных установочных параметров 393, которые предварительно заданы при изготовлении системы управления. Примеры таких предварительно заданных установочных параметров 393 показаны на фиг.12С. Эти параметры включают в себя максимальную рабочую частоту 304 вращения двигателя (об/мин), ширину 305 относительного диапазона 330 (об/мин) и значение (значения) 316 сигнала (сигналов) максимального перемещения насоса, значение 351 полной (максимальной) частоты вращения двигателя привода в высоком диапазоне, значение 352 полной частоты вращения двигателя привода в низком диапазоне и значение 353 полного (максимального) давления двигателя привода гусеницы. Предварительно заданы также пропорциональный 340, интегральный 341 и дифференциальный 342 поправочные коэффициенты ошибки системы управления, а также функция 343 времени и предельное значение 344 ошибки. Другие варианты настоящего изобретения позволяют задавать и/или повторно устанавливать некоторые или все из указанных параметров в другое время.
Вторая категория сигналов и установочных параметров содержит группу опорных значений 394, полученных во время процедуры калибровки. Примеры этих опорных значений 394 показаны на фиг.12D. Эти значения включают в себя пороговое значение 302R сигнала перемещения для насоса правой гусеницы и соответствующее пороговое значение 302L сигнала перемещения для насоса левой гусеницы. В способе калибровки для определения этих значений просто увеличивают сигналы 319 и 318 управления соответствующих насосов 38 и 40 до тех пор, пока соответствующие двигатели 42 и 44 не начнут двигаться. Значения сигналов 319 и 318 управления, которые вызывают начало перемещения, записывают как соответствующие пороговые значения 302R и 302L и запоминают в компьютерной схеме 182.
Третья категория сигналов и установочных параметров содержит группу установочных параметров 391 оператора, которые оператор задает время от времени. Примеры этих установочных параметров 391 оператора показаны на фиг.12А. В качестве дополнительных примеров можно привести регулировку селекторного переключателя 94 рабочих режимов, регулировку селекторного переключателя 96 двигателя привода гусеницы, регулировку положения дроссельной заслонки 206 двигателя и задание сигнала 308 регулирования нагрузки в процентах. Сигнал 308 регулирования нагрузки преимущественно задают при помощи ручки 380 регулятора нагрузки, которая создает сигнал 0% при полном повороте против часовой стрелки, 100% при полном повороте по часовой стрелке и пропорциональные значения между этими предельными значениями. Дисплей 100 оператора и кнопки 102 навигации и выбора в программном меню позволяют видеть и редактировать различные параметры в меню системы управления. Альтернативно, вместо дисплея 100 могут быть использованы сенсорный экран и/или компьютерная мышь. В соответствии с предпочтительным вариантом, установочные параметры, которые можно редактировать с использованием дисплея 100, включают в себя сигнал 303 управления предельной нагрузкой (об/мин), предельное значение 306Н приведения в движение в высоком режиме в процентах, предельное значение 306L приведения в движение в низком режиме в процентах, положение селектора 325 обратной связи, положение выключателя 326 управления с обратной связью по давлению от приспособления, нижнюю границу 327 относительного диапазона давлений приспособления и верхнюю границу 328 относительного диапазона давлений приспособления. Различные другие вспомогательные органы 99 управления при необходимости также могут быть предусмотрены на пульте 52 управления оператора. Некоторые операторы и некоторые технологии проходки канав могут предусматривать использование одного или нескольких указанных установочных параметров на постоянной основе. В соответствии с некоторыми вариантами, некоторые из указанных установочных параметров могут быть предварительно заданы при изготовлении системы управления и не могут быть изменены оператором.
Четвертая категория сигналов и установочных параметров содержит установочные параметры, которые оператор регулирует более часто или непрерывно. В качестве примеров можно привести перемещение рычага 90 управления приведением в движение и перемещение рулевого управления 92. При установке рычага 90 управления приведением в движение в нейтральное положение 120, сигнал 309 приведения в движение равен 0%. Перемещение вперед рычага 90 управления приведением в движение увеличивает сигнал 309 приведения в движение, причем в максимальном переднем положении 122 сигнал 309 приведения в движение достигает 100%. При перемещении рычага 90 управления приведением в движение в обратном направлении, сигнал 309 приведения в движение становится отрицательным и возрастает по величине, причем в максимальном обратном (заднем) положении 124 сигнал 309 приведения в движение достигает -100%. Выбор положения рулевого управления 92 вырабатывает два сигнала 92R и 92L масштабирования рулевого управления в процентах, в соответствии с графиками, показанными на фиг.10 и 11, на которых показана зависимость между положением рулевого управления 92 (фиг.9) и двумя сигналами 92R и 92L. Более того, характеристики этих сигналов 92R и 92L зависят от рабочего режима селекторного переключателя 94. В положении 140 оба сигнала 92R и 92L равны 100%. Перемещение рулевого управления 92 по часовой стрелке уменьшает правый сигнал 92R масштабирования рулевого управления, как уже было указано здесь выше. Аналогично, перемещение против часовой стрелки от центрального положения 140 уменьшает левый сигнал 92L масштабирования рулевого управления, как уже было указано здесь выше. В то время как один из сигналов 92R или 92L масштабирования рулевого управления меньше чем 100%, другой сигнал 92L или 92R масштабирования рулевого управления равен 100% как это показано линиями 154 и 156 на фиг.10 и 11.
Пятая категория сигналов и установочных параметров содержит сигналы, которые индицируют измеренные физические параметры канавокопателя 30 или параметры окружающей среды, и/или реакцию канавокопателя 30 на воздействие системы управления и окружающей среды. В качестве примеров таких сигналов можно привести сигнал 312 частоты вращения двигателя (об/мин), вырабатываемый при помощи датчика 208 частоты вращения двигателя. Эта категория также содержит сигнал частоты 314 вращения привода правой гусеницы (об/мин), вырабатываемый при помощи датчика 192 частоты вращения двигателя правой гусеницы, и соответствующий сигнал частоты 315 вращения привода левой гусеницы (об/мин), вырабатываемый при помощи датчика 198 частоты вращения двигателя левой гусеницы. Кроме того, эта категория содержит гидростатическое давление 321 привода правой гусеницы, гидростатическое давление 320 привода левой гусеницы, сигнал 324 частоты вращения привода приспособления (об/мин), вырабатываемый при помощи датчика 186 частоты вращения двигателя приспособления, гидростатическое давление 323 привода приспособления и различные температуры системы и окружающей среды.
Шестая категория сигналов и установочных параметров содержит группу расчетных значений 392, вычисленных при помощи компьютерной схемы 182 системы управления для дальнейшего использования в системе управления. Примеры этих расчетных значений 392 показаны на фиг.12В. Они включают в себя множитель 317 нагрузки, нижнюю границу 310 относительного диапазона множителя нагрузки/ частоты вращения двигателя, верхнюю границу 311 относительного диапазона множителя нагрузки/ частоты вращения двигателя, эффективное давление 346 привода приспособления, поправочный коэффициент 348 приспособления, значение 350 максимальной частоты вращения двигателя привода, ошибку 361 рассогласования двигателя привода левой гусеницы, ошибку 361S рассогласования частоты вращения двигателя привода левой гусеницы, ошибку 361Р рассогласования давления двигателя привода левой гусеницы, ошибку 362 рассогласования двигателя привода правой гусеницы, ошибку 362S рассогласования частоты вращения двигателя привода правой гусеницы, ошибку 362Р рассогласования давления двигателя привода правой гусеницы, промежуточную ПИД поправку 365 двигателя привода левой гусеницы, промежуточную ПИД поправку 366 двигателя привода правой гусеницы, эффективную ошибку 363 рассогласования двигателя привода правой гусеницы, эффективную ошибку 364 рассогласования двигателя привода правой гусеницы, поправочный коэффициент 371 двигателя привода левой гусеницы, поправочный коэффициент 372 двигателя привода правой гусеницы и эффективный поправочный коэффициент 373 приспособления.
Седьмая категория сигналов и установочных параметров включает в себя сигналы, полученные при помощи системы управления и предназначенные для управления параметрами системы. Примеры этих сигналов включают в себя сигнал 318 управления насосом левой гусеницы и сигнал 319 управления насосом правой гусеницы. Для некоторых факультативных режимов и конфигураций системы управления, эта категория может включать в себя сигнал 322 управления насосом приспособления. Предусмотрено, что в альтернативной конфигурации канавокопателя 30 могут быть использованы различные двигатели, регулировку которых можно осуществлять с использованием такого сигнала. В этом случае, различные сигналы привода в этой категории могут быть выработаны при помощи системы управления и переданы на двигатели.
Ввод в систему управления описанных выше сигналов и установочных параметров может быть осуществлен оператором при помощи дискретного физического переключателя (например, за счет селекторного переключателя 94 рабочих режимов), может быть осуществлен оператором при помощи выбора значения непрерывного физического контроля (например, за счет выбора положения рычага 90 управления приведением в движение), или может быть осуществлен оператором при помощи выбора дискретного или непрерывного параметра с использованием дисплея 100 оператора и кнопок 102 меню (например, за счет уставки 303 предельного значения регулятора нагрузки). Описанный здесь выше способ ввода и изменения этих параметров может быть перераспределен между точками физического и виртуального ввода в систему управления, что не выходит за рамки настоящего изобретения.
Система управления в соответствии с настоящим изобретением содержит средства, позволяющие оператору гусеничного канавокопателя выбирать рабочий режим, наиболее подходящий к имеющимся условиям. В соответствии с предпочтительным вариантом осуществления настоящего изобретения, этот выбор оператор производит с использованием четырех вводов. Первым вводом является установка селекторного переключателя 94 рабочих режимов в положение "High Trench" (высокий режим проходки канавы), "Low Trench" (низкий режим проходки канавы) или "Transport" (режим транспортировки). Вторым вводом является установка селекторного переключателя 96 диапазона двигателя гусеницы селекторный переключатель в положение "High Range" (высокий диапазон) или "Low Range" (низкий диапазон). Третьим вводом является установка селектора 325 обратной связи привода гусеницы в положение "Track Speed" (частота вращения гусеницы) или "Track Pressure" (давление гусеницы). Четвертым вводом является установка выключателя 326 управления с обратной связью по давлению от приспособления в положение "On" (включен) или "Off” (выключен). Различные рабочие режимы являются полезными и подходящими в различных условиях. Далее описаны общие характеристики и нормативы для каждого режима.
Что касается выбора положения переключателя 96 диапазона двигателя гусеницы, то положение "High Range" позволяет оператору выбирать более высокую частоту вращения гусеницы за счет существенного снижения тягового усилия. Наоборот, выбор положения "Low Range" обеспечивает более высокое тяговое усилие, но при существенно сниженной потенциальной частоте вращения. Любой из двух выборов может быть сделан независимо от положения переключателя 94 режимов, селектора 325 обратной связи гусеницы и выбора положения выключателя 326 управления с обратной связью по давлению от приспособления. Этот выбор соответствующим образом изменяет конфигурацию гидравлических двигателей 42 и 44 привода гусеницы и значение 350 максимальной частоты вращения двигателя привода для дальнейшего использования в системе управления, как это показано на фиг.22. Работа как в транспортной конфигурации, так и в конфигурации проходки канавы может быть осуществлена в положениях "High Range" и "Low Range". Однако положение "Low Range" лучше подходит для большинства режимов проходки канавы.
Что касается положения селектора 325 обратной связи гусеницы, то выбор положения "Track Speed" изменяет конфигурацию системы управления с образованием первого контура ПИД на основании сигнала 315 частоты вращения двигателя привода левой гусеницы и второго контура ПИД на основании сигнала 314 частоты вращения двигателя привода правой гусеницы. Аналогичным образом, выбор положения "Track Pressure" изменяет конфигурацию системы управления с образованием первого контура ПИД на основании сигнала 320 рабочего давления привода левой гусеницы и второго контура ПИД на основании сигнала 321 рабочего давления привода правой гусеницы. В соответствии с предпочтительным вариантом, положение селектора 325 обратной связи гусеницы является эффективным, когда селекторный переключатель 94 рабочих режимов установлен в положение "High Trench" или "Transport".
Что касается выбора положения выключателя 326 управления с обратной связью по давлению от приспособления, то выбор положения "On" конфигурирует систему управления так, чтобы образовать контур управления на основании сигнала 323 рабочего давления привода приспособления. В соответствии с предпочтительным вариантом, этот выбор положения выключателя 326 производят тогда, когда селекторный переключатель 94 рабочих режимов установлен в положение "High Trench" или "Low Trench". Вычисление и применение коэффициента 373 масштабирования управления с обратной связью по давлению от приспособления показано на фиг.20.
В соответствии с предпочтительным вариантом, выбор положения "Low Trench" (низкий режим проходки канавы) селекторного переключателя 94 рабочих режимов конфигурирует систему управления так, чтобы работать с обратной связью по частоте вращения двигателя, как это дополнительно показано на фиг.18-21. Выбор положения "High Trench" (высокий режим проходки канавы) конфигурирует систему управления так, чтобы работать обратной связью по частоте вращения двигателя и с контуром ПИД обратной связи (выбранным при помощи селектора 325 обратной связи), как это дополнительно показано на фиг.18-20 и 22-27. Выбор положения "Transport" (режим транспортировки) конфигурирует систему управления так, чтобы работать с контуром ПИД обратной связи (выбранным при помощи селектора 325 обратной связи), как это дополнительно показано на фиг.22-26 и 28.
Различные комбинации положений селекторного переключателя 94 рабочих режимов, селекторного переключателя 96 диапазона двигателя гусеницы, селектора 325 обратной связи и выключателя 326 управления с обратной связью по давлению от приспособления могут быть объединены в единственном селекторе рабочих режимов, который имеет множество подходящих положений. Более того, функциональные характеристики каждой комбинации положений могут быть перераспределены между другими переключателями и положениями, которые типичный оператор находит интуитивно.
Выбор соответствующего положения селекторного переключателя 94 рабочих режимов, селектора 325 обратной связи и выключателя 326 управления с обратной связью по давлению от приспособления зависит от рабочей среды и характеристик вынимаемого грунта. Например, в некоторых условиях, когда вынимаемый грунт является твердым, выбор положений "High Trench" / "Track Pressure" / "Attachment Pressure Feedback - Off" (высокий режим проходки канавы/ давление гусеницы/ выключение обратной связи по давлению от приспособления) имеет преимущества по сравнению с выбором положений "High Trench" / "Track Speed" / "Attachment Pressure Feedback - Off" (высокий режим проходки канавы/ частота вращения гусеницы/ выключение обратной связи по давлению от приспособления). Это преимущество получают за счет того, что прикладывают заданное давление и непрерывно регулируют усилие, приложенное к вынимаемому грунту. В другом примере, когда опора гусеницы является твердой, а вынимаемый грунт является мягким, выбор положений "High Trench"/ "Track Speed"/ "Attachment Pressure Feedback - Off" (высокий режим проходки канавы/ частота вращения гусеницы/ выключение обратной связи по давлению от приспособления), обеспечивает преимущества за счет регулирования скорости гусеничного канавокопателя 30. В соответствии с еще одним примером, когда вынимаемый грунт является неоднородным, выбор положений "High Trench" / "Track Pressure" / "Attachment Pressure Feedback - On" (высокий режим проходки канавы/ давление гусеницы/ включение обратной связи по давлению от приспособления) является предпочтительным, так как он позволяет поддерживать постоянное усилие экскавации. В соответствии с последним примером, когда вынимаемый грунт является очень твердым, выбор положений "Low Trench" / "N/A" / "Attachment Pressure Feedback - On" (высокий режим проходки канавы/ нет данных/ включение обратной связи по давлению от приспособления) позволяет обеспечивать наилучшие рабочие параметры с использованием только частоты вращения двигателя 36 и обратной связи с использованием сигнала 323 давления приспособления. В некоторых случаях, наилучшая комбинация положений может быть найдена метод проб и ошибок. Обычно задачей является достижение максимальной производительности в показателях скорости проходки канавы. Эта задача часто связана с размером комьев грунта, вынимаемых канавокопателем. Получение слишком малых комьев может свидетельствовать о том, что расходуется чрезмерная энергия на разрушение вынимаемого грунта. Часто, переключение в другой режим позволяет улучшить положение. Описанное ниже манипулирование некоторыми задаваемыми оператором параметрами также может быть использовано для настройки и/или оптимизации рабочих характеристик гусеничного канавокопателя 30, чтобы лучше соответствовать требованиям специфической работы.
Обратимся теперь к рассмотрению чертежей, чтобы облегчить более глубокое обсуждение, а более конкретно, к рассмотрению фиг.5-28, на которых показана многорежимная система управления, предназначенная для использования с гусеничным канавокопателем 30.
На фиг.13-15 показан изменяемый относительный диапазон 330, в котором зависимость между частотой 312 вращения двигателя и множителем 317 нагрузки является пропорциональной. Оператор может выбирать и позднее изменять местоположение относительного диапазона 330, за счет его сдвига 331 вправо (увеличения) или сдвига 332 влево (уменьшения), с использованием ручки 380 регулятора нагрузки. Как это показано на фиг.14, поворот по часовой стрелке ручки 380 регулятора нагрузки вызывает сдвиг 331 вправо (увеличение) положения относительного диапазона 330. Наоборот, поворот против часовой стрелке ручки 380 регулятора нагрузки вызывает сдвиг 332 влево (уменьшение) положения относительного диапазона, как это показано на фиг.15. Специфическое положение ручки 380 регулятора нагрузки может быть выбрано в соответствии с предпочтениями оператора и/или в соответствии с текущими параметрами проходки канавы. Относительный диапазон 330 и множитель 317 нагрузки, как это показано на фиг.13-15 и вычислено на фиг.18 и 19, имеют линейную пропорциональную зависимость. В соответствии с другими вариантами настоящего изобретения могут быть использованы другие нелинейные функциональные зависимости, в которых могут быть использованы другие элементы, такие как элемент демпфирования.
На фиг.16 показан контур регулирования, который позволяет контролировать давления 321 и 320 привода гусеницы (которые аппроксимированы давлением в рабочей линии 244 высокого давления, при отбросе давления в обратной линии 246), чтобы определять и прикладывать соответствующие сигналы 319 и 318 управления к насосам 38 и 40 привода гусеницы, когда гусеничный канавокопатель 30 работает в режиме управления с обратной связью по давлению от привода гусеницы (который выбран при помощи селектора 325 обратной связи). Расход рабочей жидкости каждого из насосов 38 и 40 прямо пропорционален соответствующим сигналам 319 и 318 управления. Задачей этого контура регулирования является поддержание специфического уровня 321 и 320 давления на двигателях 42 и 44 привода гусеницы, вне зависимости от частоты вращения приводов гусениц 34 и 32. Тяговое усилие приводов гусениц 34 и 32 связано с этими давлениями 321 и 320 и, следовательно, регулируется ими. В соответствии с одним из вариантов, заданные давления 321 и 320 определяют путем умножения полного (максимального) давления 353 двигателя на соответствующие управляющие сигналы 92R и 92L масштабирования, сигнал 309 положения рычага управления приведением в движение, множитель 317 нагрузки, коэффициент 373 масштабирования обратной связи по давлению от приспособления и предельное значение 306Н приведения в движение в высоком режиме, как это дополнительно описано со ссылкой на фиг.24. Отклонения от этих значений приводят к появлению сигналов 361Р и 362Р ошибки, которые система управления стремится свести к минимуму.
На фиг.17 показан контур регулирования, который позволяет контролировать давление 323 привода приспособления (которое аппроксимировано давлением в рабочей линии 248 высокого давления, при отбросе давления в обратной линии 250), когда гусеничный канавокопатель 30 работает с выключателем 326 управления с обратной связью по давлению от приспособления в положении "On" (включено). В частности, оператор задает нижнюю и верхнюю границы 327 и 328 относительного диапазона давлений приспособления, образующие относительный диапазон 329 управления с обратной связью по давлению от привода приспособления. Как это дополнительно описано на фиг.20 и показано на фиг.29, текущее рабочее давление 323 привода приспособления сравнивают с верхней и нижней границами 327 и 328. Если это давление ниже нижней границы 327, то поправочный коэффициент 348 приспособления выбирают равным 100%, что приводит к увеличению тягового усилия привода гусениц 32 и 34. Если это давление выше верхней границы 328, то поправочный коэффициент 348 приспособления выбирают равным 0%, что приводит к уменьшению тягового усилия привода гусениц 32 и 34. Если это давление находится между границами 327 и 328, то поправочный коэффициент 348 приспособления вычисляют так, как это показано на фиг.20, при этом он будет пропорционален положению давления 323 привода приспособления внутри диапазона, имеющему значение 100% у нижней границы 327 и значение 0% у верхней границы 328. Это значение тогда присваивают эффективному поправочному коэффициенту 373 приспособления, если селекторный переключатель 94 рабочих режимов не установлен в положение "Transport" (режим транспортировки) и выключатель 326 управления с обратной связью по давлению от приспособления установлен в положение "On" (включено). В противном случае, эффективный поправочный коэффициент 373 приспособления выбирают равным 100%, что эффективно отключает обратную связь по давлению от привода приспособления. Оператор может сдвигать вправо (333) или сдвигать влево (334) положение нижней границы 327. Аналогичным образом, оператор может независимо сдвигать вправо (335) или сдвигать влево (336) положение верхней границы 328. Подстройка границ 327 и 328 относительного диапазона 329 управления с обратной связью по давлению от привода приспособления может быть использована для дополнительной настройки и оптимизации гусеничного канавокопателя 30, чтобы лучше соответствовать требованиям специфической работы. В приведенном выше примерном варианте описана линейная зависимость между поправочным коэффициентом 348 приспособления и давлением 323 привода приспособления. В соответствии с другими вариантами может быть использована нелинейная зависимость. Кроме того, в приведенном здесь выше примерном варианте, оператор может подстраивать границы 327 и 328 относительного диапазона 329 управления с обратной связью по давлению от привода приспособления. В соответствии с другими вариантами, границы 327 и 328 могут быть предварительно заданы при изготовлении системы управления и не могут быть изменены оператором.
На фиг.18-28 описан вариант настоящего изобретения с использованием блок-схем, которые позволяют вычислять и изменять различные переменные величины системы управления, чтобы управлять приводом гусениц 32 и 34 в различных рабочих режимах. Следует иметь в виду, что могут быть использованы и другие алгоритмы, которые позволяют получить эквивалентные зависимости между различными переменными.
На фиг.18 показан способ, при помощи которого вычисляют и запоминают верхнюю границу 311 и нижнюю границу 310 относительного диапазона 330. Входные данные для этого способа, которые находят в операциях 602-608, включают в себя максимальную рабочую частоту 304 вращения двигателя, определяемую в операции 602, ширину 305 относительного диапазона, определяемую в операции 604, сигнал 303 управления предельной нагрузкой, определяемый в операции 606, и сигнал 308 регулирования нагрузки, определяемый в операции 608. Нижнюю границу 310 вычисляют и запоминают в операции 610, а верхнюю границу 311 и запоминают в операции 612. Затем цикл вычислений повторяют.
На фиг.19 показан способ, при помощи которого вычисляют и запоминают множитель 317 нагрузки. Входные данные для этого способа, которые находят в операциях 620-626, включают в себя фактическую частоту 312 вращения двигателя, определяемую в операции 620, нижнюю границу 310 относительного диапазона 330, определяемую в операции 622, и верхнюю границу 311 относительного диапазона 330, определяемую в операции 624, и ширину 305 относительного диапазона, определяемую в операции 626. Частоту 312 вращения двигателя проверяют в операции 628 и если находят, что она меньше или равна нижней границе 310, тогда множитель 317 нагрузки устанавливают на 0% в операции 630 и запоминают. Если результат операции 628 отрицательный, тогда частоту 312 вращения двигателя проверяют в операции 632. Если находят, что частота 312 вращения двигателя находится между верхней границей 311 и нижней границей 310, тогда множитель 317 нагрузки вычисляют в операции 634 и запоминают. Если результат операции 632 отрицательный, тогда частоту 312 вращения двигателя проверяют в операции 636. Если находят, что частота 312 вращения двигателя больше или равна верхней границе 311, тогда множитель нагрузки устанавливают на 100% в операции 638 и запоминают. Если результат операции 636 отрицательный, тогда вырабатывают ошибку выхода из диапазона в операции 640. Цикл вычислений повторяют после того, как запоминают множитель 317 нагрузки, или после операции 640.
На фиг.20 показан способ, при помощи которого вычисляют и запоминают эффективный поправочный коэффициент 373 приспособления. Входные данные для этого способа, которые находят в операциях 641-645, включают в себя верхнюю границу 328 диапазона давлений приспособления, определяемую в операции 641, нижнюю границу 327 диапазона давлений приспособления, определяемую в операции 642, положение 94 селекторного переключателя рабочих режимов, определяемое в операции 643, выбор положения выключателя 326 управления с обратной связью по давлению от приспособления, определяемый в операции 644, и рабочее давление 323 привода приспособления, определяемое в операции 645. Рабочее давление 323 привода приспособления проверяют в операции 646, и если находят, что оно больше или равно верхней границы 328 диапазона давлений приспособления, тогда эффективное давление 346 привода приспособления устанавливают равным верхней границы 328 диапазона давлений приспособления в операции 647; в противном случае рабочее давление 323 привода приспособления вновь проверяют в операции 648. Если находят, что рабочее давление 323 привода приспособления меньше чем или равно нижней границе 327 диапазона давлений приспособления, тогда эффективное давление 346 привода приспособления устанавливают равным нижней границе 327 диапазона давлений приспособления в операции 649; в противном случае рабочее давление 323 привода приспособления вновь проверяют в операции 650. Если находят, что рабочее давление 323 привода приспособления больше чем нижняя граница 327 диапазона давлений приспособления и меньше чем верхняя граница 328 диапазона давлений приспособления, тогда эффективное давление 346 привода приспособления устанавливают равным рабочему давлению 323 привода приспособления в операции 651; в противном случае ошибку выхода из диапазона вырабатывают в операции 652 и цикл вычислений повторяют. В операции 653 вычисляют поправочный коэффициент 348 приспособления. В операции 654 проверяют положение селекторного переключателя 94 рабочих режимов, и если он стоит в положении "Transport" (режим транспортировки), то эффективный поправочный коэффициент 373 приспособления устанавливают равным 100% и запоминают в операции 655; в противном случае положение выключателя 326 управления с обратной связью по давлению от приспособления проверяют в операции 656. Если выключатель 326 установлен в положение "On" (включено), тогда эффективный поправочный коэффициент 373 приспособления устанавливают равным поправочному коэффициенту 348 приспособления и запоминают в операции 657; в противном случае эффективный поправочный коэффициент 373 приспособления устанавливают равным 100% и запоминают в операции 658. Затем цикл вычислений повторяют.
На фиг.21 показан способ, при помощи которого вычисляют и запоминают сигнал 318 управления приводом левой гусеницы и сигнал 319 управления приводом правой гусеницы, когда система управления установлена в низкий режим проходки канавы. Входные данные для этого способа, которые находят в операциях 660-676, включают в себя левый сигнал 92L масштабирования рулевого управления, определяемый в операции 660, правый сигнал 92R масштабирования рулевого управления, определяемый в операции 662, сигнал 309 положения рычага управления приведением в движение, определяемый в операции 664, множитель 317 нагрузки, определяемый в операции 666, эффективный поправочный коэффициент 373 приспособления, определяемый в операции 668, предельное значение 306L приведения в движение в низком режиме, определяемое в операции 670, полное (максимальное) значение 316 сигнала привода, определяемое в операции 672, пороговое значение 302L (сигнала управления) для привода левой гусеницы, определяемое в операции 674, и пороговое значение 302R (сигнала управления) для привода правой гусеницы, определяемое в операции 676. Сигнал 318 управления приводом левой гусеницы вычисляют и запоминают в операции 678, а сигнал 319 управления приводом правой гусеницы вычисляют и запоминают в операции 680. Затем цикл вычислений повторяют.
На фиг.22 показан способ, при помощи которого вычисляют и запоминают надлежащее значение 350 максимальной частоты вращения двигателя привода. Входные данные для этого способа, которые находят в операциях 702-706, включают в себя положение переключателя 96 диапазона двигателя гусеницы, определяемое в операции 702, значение 351 полной (максимальной) частоты вращения двигателя привода в высоком диапазоне, определяемое в операции 704, и значение 352 полной (максимальной) частоты вращения двигателя привода в низком диапазоне, определяемое в операции 706. Положение переключателя 96 диапазона двигателя гусеницы проверяют в операции 708 и если находят, что переключатель находится в положении "high" (высокий диапазон), тогда значение 350 максимальной частоты вращения двигателя привода устанавливают равным значению 351 полной (максимальной) частоты вращения двигателя привода в высоком диапазоне в операции 710 и запоминают. Если результат операции 708 отрицательный, тогда положение переключателя проверяют в операции 712. Если находят, что переключатель 96 диапазона двигателя гусеницы находится в положении "low" (низкий диапазон), тогда значение 350 максимальной частоты вращения двигателя привода устанавливают равным значению 352 полной (максимальной) частоты вращения двигателя привода в низком диапазоне в операции 714 и запоминают. Если результат операции 712 отрицательный, тогда ошибку выхода из диапазона вырабатывают в операции 716. Цикл вычислений повторяют после запоминания значения 350 максимальной частоты вращения или после операции 716.
На фиг.23 показан способ, при помощи которого вычисляют и запоминают ошибку 361S рассогласования частоты вращения привода левой гусеницы и ошибку 362S рассогласования частоты вращения привода правой гусеницы. Входные данные для этого способа, которые находят в операциях 717-725, включают в себя левый сигнал 92L масштабирования, определяемый в операции 717, правый сигнал 92R масштабирования, определяемый в операции 718, сигнал 309 положения рычага управления приведением в движение, определяемый в операции 719, множитель 317 нагрузки, определяемый в операции 720, эффективный поправочный коэффициент 373 приспособления, определяемый в операции 721, предельное значение 306Н приведения в движение в высоком режиме, определяемое в операции 722, значение 350 максимальной частоты вращения двигателя привода, определяемое в операции 723, частоту 315 вращения привода левой гусеницы, определяемую в операции 724, и частоту 314 вращения привода правой гусеницы, определяемую в операции 725. Ошибку 361S рассогласования частоты вращения привода левой гусеницы вычисляют и запоминают в операции 726, а ошибку 362S рассогласования частоты вращения привода правой гусеницы вычисляют и запоминают в операции 727. Затем цикл вычислений повторяют.
На фиг.24 показан способ, при помощи которого вычисляют и запоминают ошибку 361Р рассогласования давления привода левой гусеницы и ошибку 362Р рассогласования давления привода правой гусеницы. Входные данные для этого способа, которые находят в операциях 728-736, включают в себя левый сигнал 92L масштабирования, определяемый в операции 728, правый сигнал 92R масштабирования, определяемый в операции 729, сигнал 309 положения рычага управления приведением в движение, определяемый в операции 730, множитель 317 нагрузки, определяемый в операции 731, эффективный поправочный коэффициент 373 приспособления, определяемый в операции 732, предельное значение 306Н приведения в движение в высоком режиме, определяемое в операции 733, значение 353 полного (максимального) давления двигателя привода гусеницы, определяемое в операции 734, рабочее давление 320 привода левой гусеницы, определяемое в операции 735, и рабочее давление 321 привода правой гусеницы, определяемое в операции 736. Ошибку 361Р рассогласования давления привода левой гусеницы вычисляют и запоминают в операции 737, а ошибку 362Р рассогласования давления привода правой гусеницы вычисляют и запоминают в операции 738. Затем цикл вычислений повторяют.
На фиг.25 показан способ, при помощи которого выбирают и запоминают ошибку 361 рассогласования привода левой гусеницы и ошибку 362 рассогласования привода правой гусеницы. Входные данные для этого способа, которые находят в операциях 739-743, включают в себя ошибку 361S рассогласования частоты вращения привода левой гусеницы, определяемую в операции 739, ошибку 361Р рассогласования давления привода левой гусеницы, определяемую в операции 740, ошибку 362S рассогласования частоты вращения привода правой гусеницы, определяемую в операции 741, ошибку 362Р рассогласования давления привода правой гусеницы, определяемую в операции 742, и выбор положения селектора 325 обратной связи привода гусеницы, определяемый в операции 743. Выбор положения селектора 325 обратной связи привода гусеницы проверяют в операции 744, и если селектор стоит в положении "Track Speed" (частота вращения гусеницы), то ошибку 361 рассогласования привода левой гусеницы устанавливают равной ошибке 361S рассогласования частоты вращения привода левой гусеницы и запоминают, а ошибку 362 рассогласования привода правой гусеницы устанавливают равной ошибке 362S рассогласования частоты вращения привода правой гусеницы и запоминают в операции 745; в противном случае выбор положения селектора 325 обратной связи привода гусеницы вновь проверяют в операции 746. Если селектор 325 обратной связи привода гусеницы стоит в положении "Track Pressure" (давление гусеницы), то ошибку 361 рассогласования привода левой гусеницы устанавливают равной ошибке 361Р рассогласования давления привода левой гусеницы и запоминают, а ошибку 362 рассогласования привода правой гусеницы устанавливают равной ошибке 362Р рассогласования давления привода и запоминают в операции 747; в противном случае ошибку выхода из диапазона вырабатывают в операции 748. Затем цикл вычислений повторяют.
На фиг.26 показан способ, при помощи которого вычисляют и запоминают левый ПИД поправочный коэффициент 371 и правый ПИД поправочный коэффициент 372. Входные данные для этого способа, которые находят в операциях 750-756, включают в себя ошибку 361 (рассогласования) привода левой гусеницы, определяемую в операции 750; ошибку 362 (рассогласования) привода правой гусеницы, определяемую в операции 752; предельное значение 344 ошибки, определяемое в операции 754; и переменные Р 340, I 341, D 342, и СТ 343 ПИД регулирования, определяемые в операции 756. Промежуточную ПИД поправку 365 двигателя привода левой гусеницы вычисляют, как это показано в операции 758, и проверяют в операции 760. Если промежуточная ПИД поправка 365 двигателя привода левой гусеницы больше чем предельное значение 344 ошибки, тогда эффективную ошибку 363 рассогласования двигателя привода правой гусеницы устанавливают равной предельному значению 344 ошибки и запоминают в операции 762; в противном случае промежуточную ПИД поправку 365 двигателя привода левой гусеницы проверяют в операции 764. Если промежуточная ПИД поправка 365 двигателя привода левой гусеницы меньше, чем отрицательное предельное значение 344 ошибки, тогда эффективную ошибку 363 рассогласования двигателя привода правой гусеницы устанавливают равной отрицательному предельному значению 344 ошибки и запоминают в операции 766; в противном случае эффективную ошибку 363 рассогласования двигателя привода правой гусеницы устанавливают равной промежуточной ПИД поправке 365 двигателя привода левой гусеницы и запоминают в операции 768. Вычисления продолжают в операции 770, в которой вычисляют промежуточную ПИД поправку 366 двигателя привода правой гусеницы и затем проверяют в операции 772. Если промежуточная ПИД поправка 366 двигателя привода правой гусеницы больше чем предельное значение 344 ошибки, тогда эффективную ошибку 364 рассогласования двигателя привода правой гусеницы устанавливают равной предельному значению 344 ошибки и запоминают в операции 774; в противном случае промежуточную ПИД поправку 366 двигателя привода правой гусеницы проверяют в операции 776. Если промежуточная ПИД поправка 366 двигателя привода правой гусеницы меньше чем отрицательное предельное значение 344 ошибки, тогда эффективную ошибку 364 рассогласования двигателя привода правой гусеницы устанавливают равной отрицательному предельному значению 344 ошибки и запоминают в операции 778; в противном случае эффективную ошибку 364 рассогласования двигателя привода правой гусеницы устанавливают равной промежуточной ПИД поправке 366 двигателя привода правой гусеницы и запоминают в операции 780. Вычисления продолжают в операции 782, в которой вычисляют и запоминают поправочный коэффициент 371 двигателя привода левой гусеницы, и в операции 784, в которой вычисляют и запоминают поправочный коэффициент 372 двигателя привода правой гусеницы. Затем цикл вычислений повторяют.
На фиг.27 показан способ, при помощи которого вычисляют и запоминают сигнал 318 управления приводом левой гусеницы и сигнал 319 управления приводом правой гусеницы, когда система управления установлена в высокий режим проходки канавы. Входные данные для этого способа, которые находят в операциях 802-826, включают в себя левый сигнал 92L масштабирования, определяемый в операции 802, правый сигнал 92R масштабирования, определяемый в операции 804, сигнал 309 положения рычага управления приведением в движение, определяемый в операции 806, множитель 317 нагрузки, определяемый в операции 808, эффективный поправочный коэффициент 373 приспособления, определяемый в операции 810, предельное значение 306Н приведения в движение в высоком режиме, определяемое в операции 812, полное (максимальное) значение 316 сигнала привода, определяемое в операции 814, пороговое значение 302L для привода левой гусеницы, определяемое в операции 816, пороговое значение 302R для привода правой гусеницы, определяемое в операции 818, левый ПИД поправочный коэффициент 371, определяемый в операции 820, правый ПИД поправочный коэффициент 372, определяемый в операции 822, пороговое значение 302L для привода левой гусеницы, определяемое в операции 824, и пороговое значение 302R для привода правой гусеницы, определяемое в операции 826. Сигнал 318 управления приводом левой гусеницы вычисляют и запоминают в операции 828, а сигнал 319 управления приводом правой гусеницы вычисляют и запоминают в операции 830. Затем цикл вычислений повторяют.
На фиг.28 показан способ, при помощи которого вычисляют и запоминают сигнал 318 управления приводом левой гусеницы и сигнал 319 управления приводом правой гусеницы, когда система управления установлена в транспортный режим. Входные данные для этого способа, которые находят в операциях 840-852, включают в себя левый сигнал 92L масштабирования, определяемый в операции 840, правый сигнал 92R масштабирования, определяемый в операции 842, сигнал 309 положения рычага управления приведением в движение, определяемый в операции 844, левый ПИД поправочный коэффициент 371, определяемый в операции 846, правый ПИД поправочный коэффициент 372, определяемый в операции 848, пороговое значение 302L для привода левой гусеницы, определяемое в операции 850, и пороговое значение 302R для привода правой гусеницы, определяемое в операции 852. Сигнал 318 управления приводом левой гусеницы вычисляют и запоминают в операции 854, а сигнал 319 управления приводом правой гусеницы вычисляют и запоминают в операции 856. Затем цикл вычислений повторяют.
В соответствии с некоторыми вариантами настоящего изобретения используют множитель 317 нагрузки и объединенный с ним изменяемый оператором относительный диапазон 330, которые показаны на фиг.13-15 и вычислены на фиг.18 и 19. Множитель 317 нагрузки, который обеспечивает обратную связь двигателя 36 с системой управления, используют для вычисления сигнала 318 управления приводом левой гусеницы и сигнала 319 управления приводом правой гусеницы в низком и высоком режимах проходки канавы, как это показано соответственно на фиг.21 и 27.
Множитель 317 нагрузки и относительный диапазон 330 преимущественно позволяют непрерывно регулировать частоту вращения приводов гусениц 32 и 34 или тяговое усилие (в зависимости от положения селектора 325 обратной связи), на основании нагрузки двигателя.
Это позволяет двигателю 36 непрерывно работать при высоких уровнях выходной мощности, в результате чего может быть обеспечена высокая производительность гусеничного канавокопателя 30. Другими словами, если гусеничный канавокопатель 30 встречает уплотненный грунт, так что частота 312 вращения двигателя понижается, тогда множитель 317 нагрузки уменьшают, что приводит к снижению частоты вращения приводов гусениц 32 и 34 или тягового усилия. Это действие несколько уменьшает нагрузку на двигатель 36 и позволяет повысить частоту вращения двигателя. Наоборот, если гусеничный канавокопатель 30 встречает рыхлый грунт, так что частота вращения двигателя 36 повышается, тогда множитель 317 нагрузки увеличивают, что приводит к увеличению частоты вращения приводов гусениц 32 и 34 или тягового усилия. Это действие повышает нагрузку, приложенную к двигателю 36, и снижает частоту вращения двигателя. За счет надлежащего регулирования переменных системы управления, можно поддерживать частоту вращения двигателя 36 в области высокого уровня выходной мощности и для этого непрерывно и автоматически регулировать частоту вращения приводов гусениц 32 и 34 или тяговое усилие.
Возможность регулировки оператором относительного диапазона 330 за счет поворота ручки 380 регулятора нагрузки преимущественно позволяет оператору осуществлять регулировку гусеничного канавокопателя 30 в соответствии с данными условиями окружающей среды или с желательными рабочими характеристиками. Изменение приложенной к двигателю 36 нагрузки за счет различного использования имеющейся мощности и крутящего момента позволяет изменять и регулировать результаты проходки канавы.
Компьютерная схема 182, раскрытая в описании настоящего изобретения, может содержать одно или несколько вычислительных устройств. Эти вычислительные устройства могут быть физически распределены по объему гусеничного канавокопателя 30 и могут быть встроены в некоторые компоненты гусеничного канавокопателя 30; например, система управления двигателем 36 может иметь вычислительное устройство, которое входит в компьютерную схему 182. Могут быть использованы различные вычислительные устройства, в том числе контроллер и компьютер. Вычислительные устройства могут быть цифровыми или аналоговыми и могут быть программируемыми при помощи программного обеспечения.
В некоторых случаях, в приведенном выше описании указаны специфические единицы измерения для специфических переменных, например, об/мин. Следует иметь в виду, что в каждом таком случае может быть использована и другая система единиц изменения. Кроме того, предусматривается, что при необходимости может быть использована преобразованная система единиц изменения, например, частота вращения (об/мин) привода гусеницы может быть преобразована в линейную скорость перемещения гусеницы (м/мин).
Некоторые сигналы, которые описаны выше со ссылкой на чертежи, описаны как сигналы специфического типа, имеющие специфические единицы измерения. Например, указано, что сигнал 309 приведения в движение имеет диапазон от -100% до 100%, а сигналы 318 и 319 управления насосами приводов гусениц даны в мА электрического тока. Однако следует иметь в виду, что в этих и других случаях могут быть использованы различные другие типы сигналов и единиц измерения, что не выходит за рамки настоящего изобретения; например, сигналы 318 и 319 управления насосами приводов гусениц могут быть сигналами широтно-импульсной модуляции (ЩИМ). Аналогичным образом, эти сигналы также могут быть преобразованы в сигналы другого типа внутри самой системы управления, например, сигнал 309 приведения в движение первоначально может быть аналоговым сигналом (мВ) в органе 90 управления приведением в движение и затем может быть преобразован в цифровой сигнал. Эти преобразования могут быть осуществлены в различных местоположениях, в том числе в устройстве, которое вырабатывает сигнал, в преобразователе сигнала, в контроллере и/или в компьютерной схеме 182.
В соответствии с некоторыми вариантами, в приведенном выше описании измеряют рабочее давление гидростатического привода в одной точке данного гидравлического контура, для использования при создании обратной связи с системой управления. В соответствии с другими вариантами, давление гидростатического привода может быть изменено в нескольких точках вдоль гидравлического контура и усреднено. В соответствии с некоторыми другими вариантами, давление гидростатического привода может быть изменено на насосе или двигателе, за счет измерения давлений на обеих сторонах насоса или двигателя и вычисления их разности.
В приведенном описании изобретения изложены варианты настоящего изобретения, имеющие различные контуры управления с обратной связью. Известны различные способы управления с обратной связью, в том числе такие, которые позволяют вычислять ошибки, корректировать усиление, вычислять время линейного нарастания сигнала, вычислять задержки, усреднять данные, определять гистерезис и осуществлять другие математические операции с обратной связью. Следует иметь в виду, что некоторые из этих способов могут быть объединены и введены в описанные выше варианты.
Акроним ПИД, использованный в данном описании, относится к технике пропорционально-интегрально-дифференциального регулирования, которая известна сама по себе. В соответствии с некоторыми вариантами настоящего изобретения, одно или несколько действий могут отсутствовать в контуре ПИД регулирования, за счет чего получают систему управления с ПИ (с пропорционально-интегральным) регулированием, с ПД (с пропорционально-дифференциальным) регулированием или с П (с пропорциональным) регулированием.
Уже известны электрогенераторы и электродвигатели, причем известно также, что они могут быть объединены для образования электрического привода. Более того, двигатель может приводить в действие электрогенератор, причем электродвигатель может быть оперативно подключен к приводу гусеницы. Предусмотрено, что описанный выше электрический привод может быть заменен гидростатическим приводом в описанной выше области применения. Описанная здесь система управления может быть адаптирована для того, что управлять электрическим приводом. В этом случае, управление частотой вращения электрического привода можно сравнить с управлением перемещением насоса гидростатического привода, а управление крутящим моментом электрического привода можно сравнить с управлением давления гидростатического привода.
Приведенное выше описание, примеры и данные дают полное представление об изготовлении и использовании настоящего изобретения. Несмотря на то, что были описаны различные варианты осуществления изобретения, совершенно ясно, что в них специалистами в данной области могут быть внесены изменения и дополнения, которые не выходят однако за рамки приведенной далее формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАНАВОКОПАТЕЛЬ С АВТОМАТИЧЕСКИМ ВРЕЗАНИЕМ И РЕГУЛИРОВКОЙ ГЛУБИНЫ СТРЕЛЫ | 2008 |
|
RU2515140C2 |
| Колёсно-гусеничное шасси транспортного средства повышенной проходимости | 2022 |
|
RU2787607C1 |
| УПРАВЛЯЕМЫЙ ГУСЕНИЧНЫЙ ХОДОВОЙ МЕХАНИЗМ | 2015 |
|
RU2679792C2 |
| УСТРОЙСТВО И СПОСОБ РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2006 |
|
RU2429986C2 |
| ДВУХГУСЕНИЧНЫЙ ТРАКТОР | 2013 |
|
RU2607932C2 |
| Система и способ управления движением самоходной горной машины | 2018 |
|
RU2764007C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ СИСТЕМЫ ПРИВОДА/РУЛЕВОГО УПРАВЛЕНИЯ ГУСЕНИЧНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2247048C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ГУСЕНИЧНЫМ ТРАНШЕЙНЫМ ЭКСКАВАТОРОМ | 1995 |
|
RU2141907C1 |
| ГУСЕНИЧНЫЙ ТРАКТОР | 2008 |
|
RU2385249C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГУСЕНИЧНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2001 |
|
RU2194297C1 |
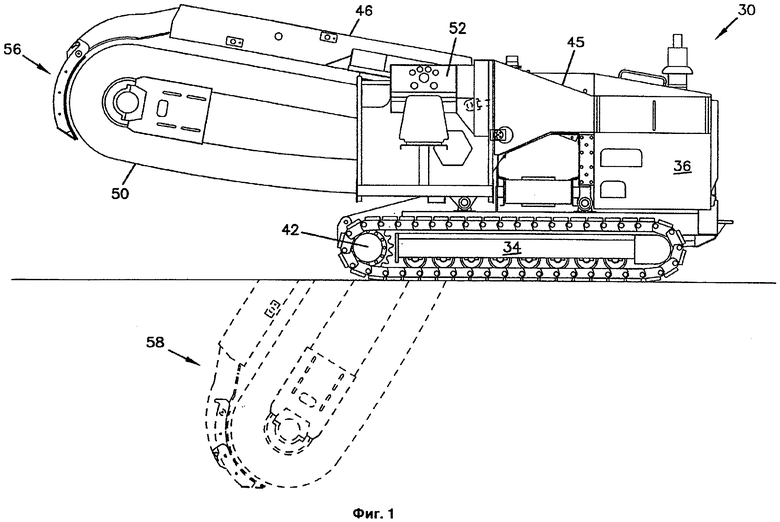
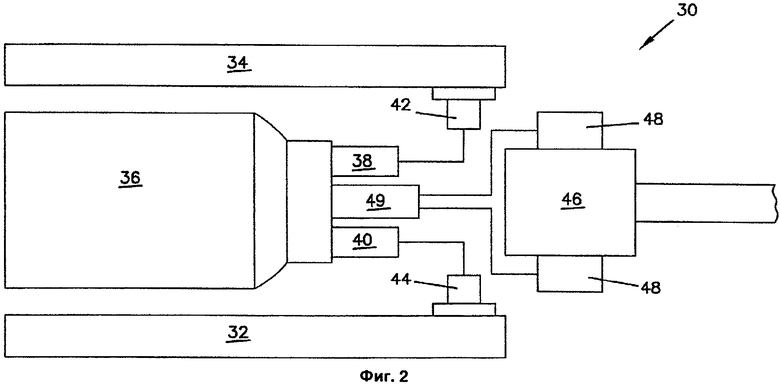
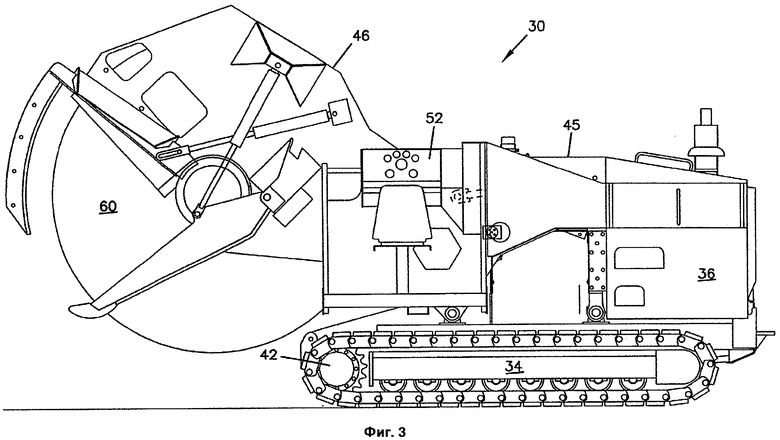
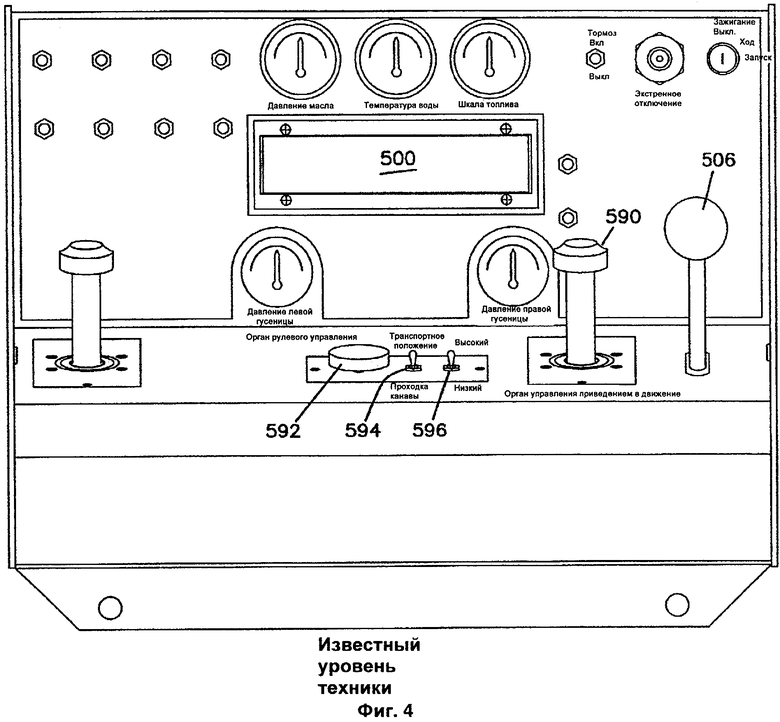
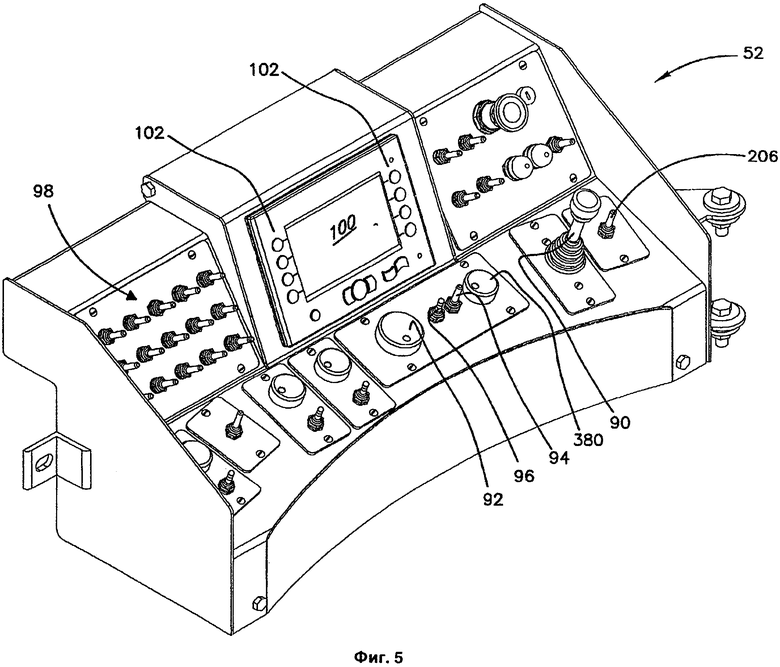
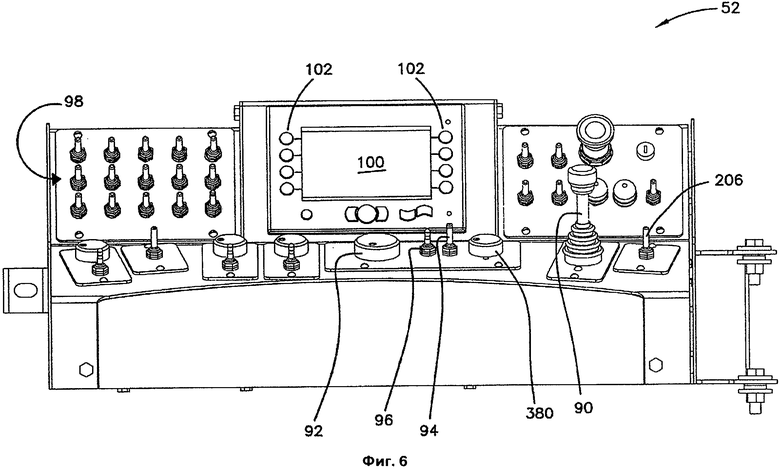
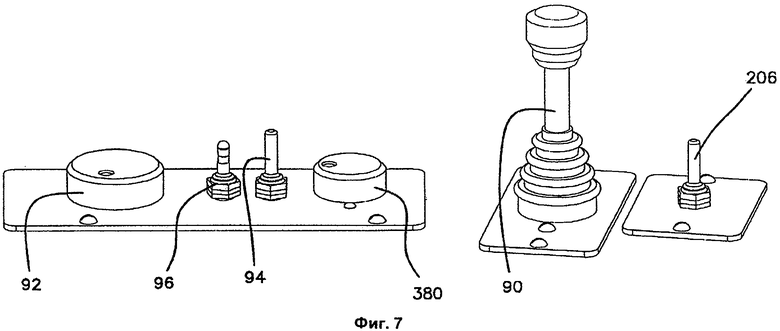
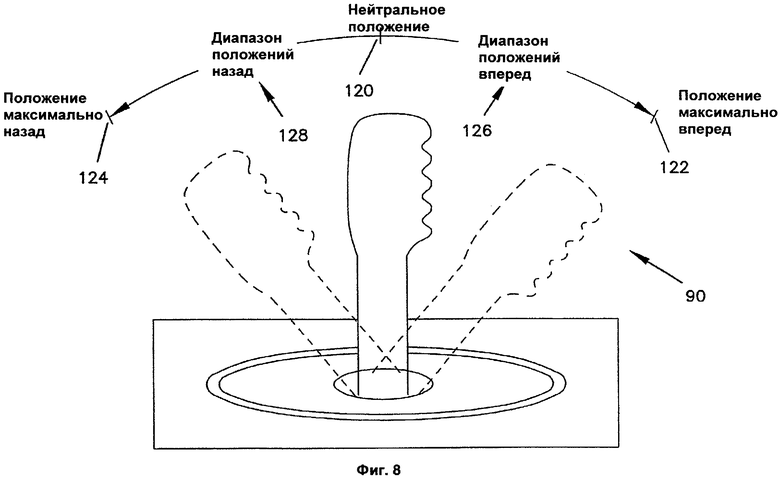
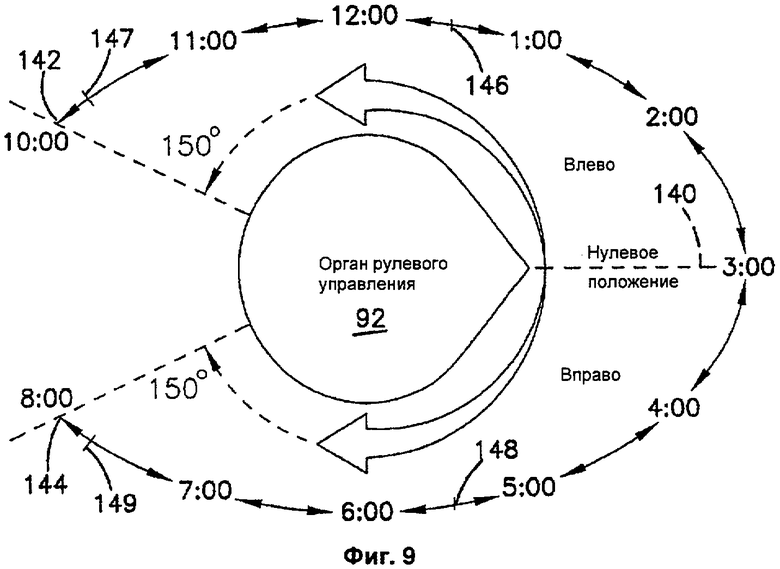

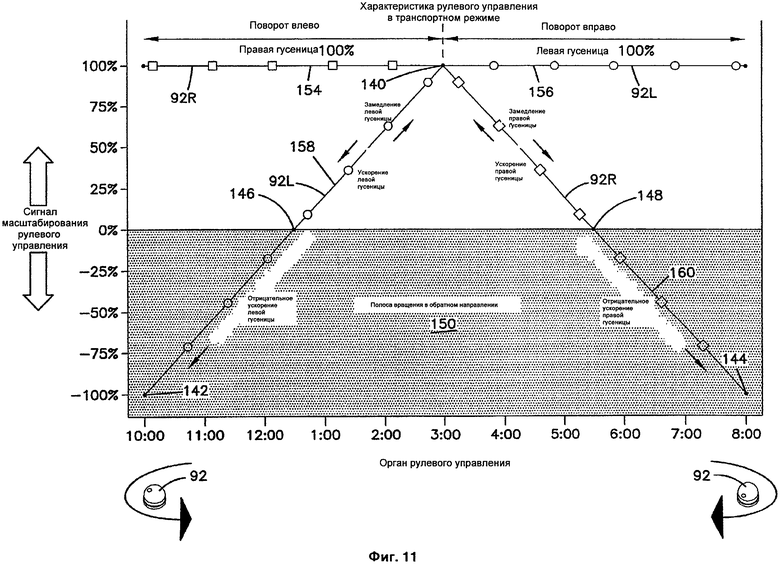
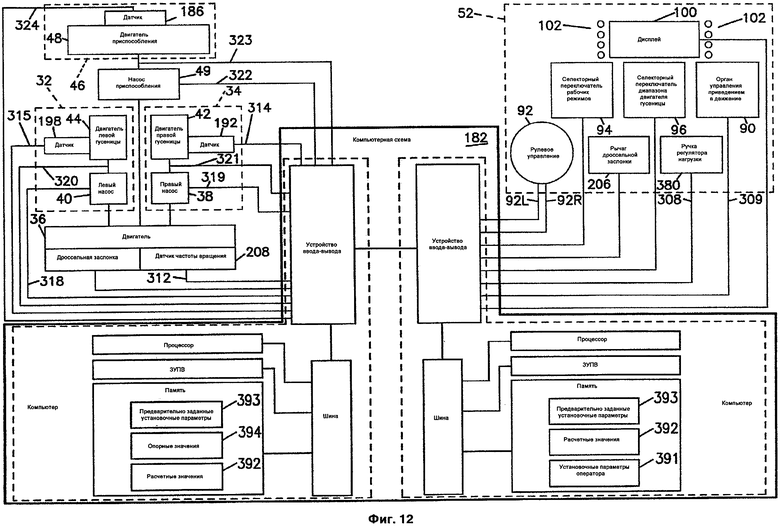
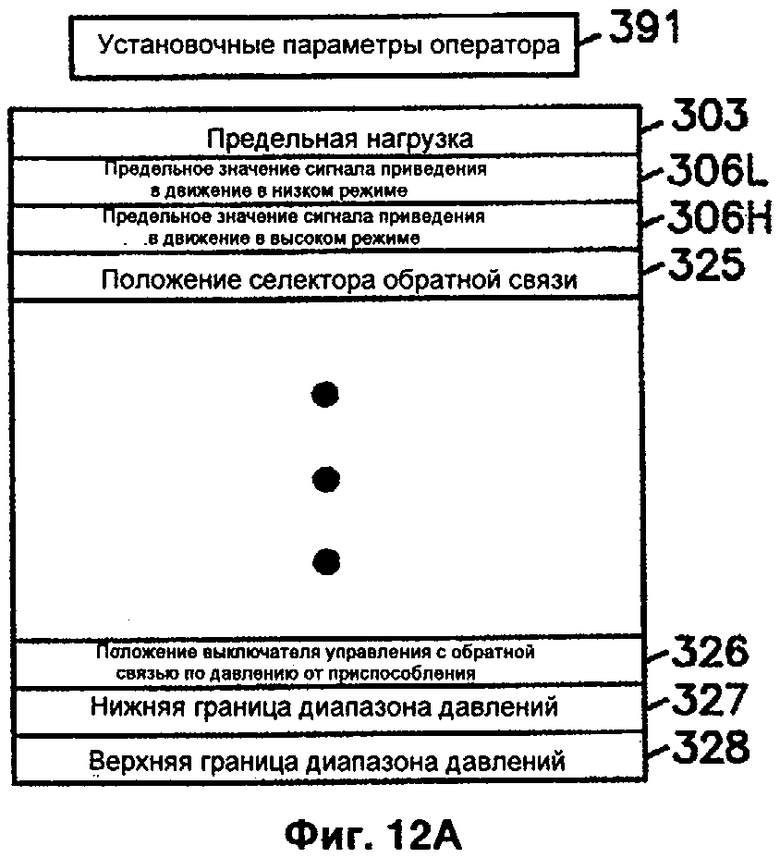
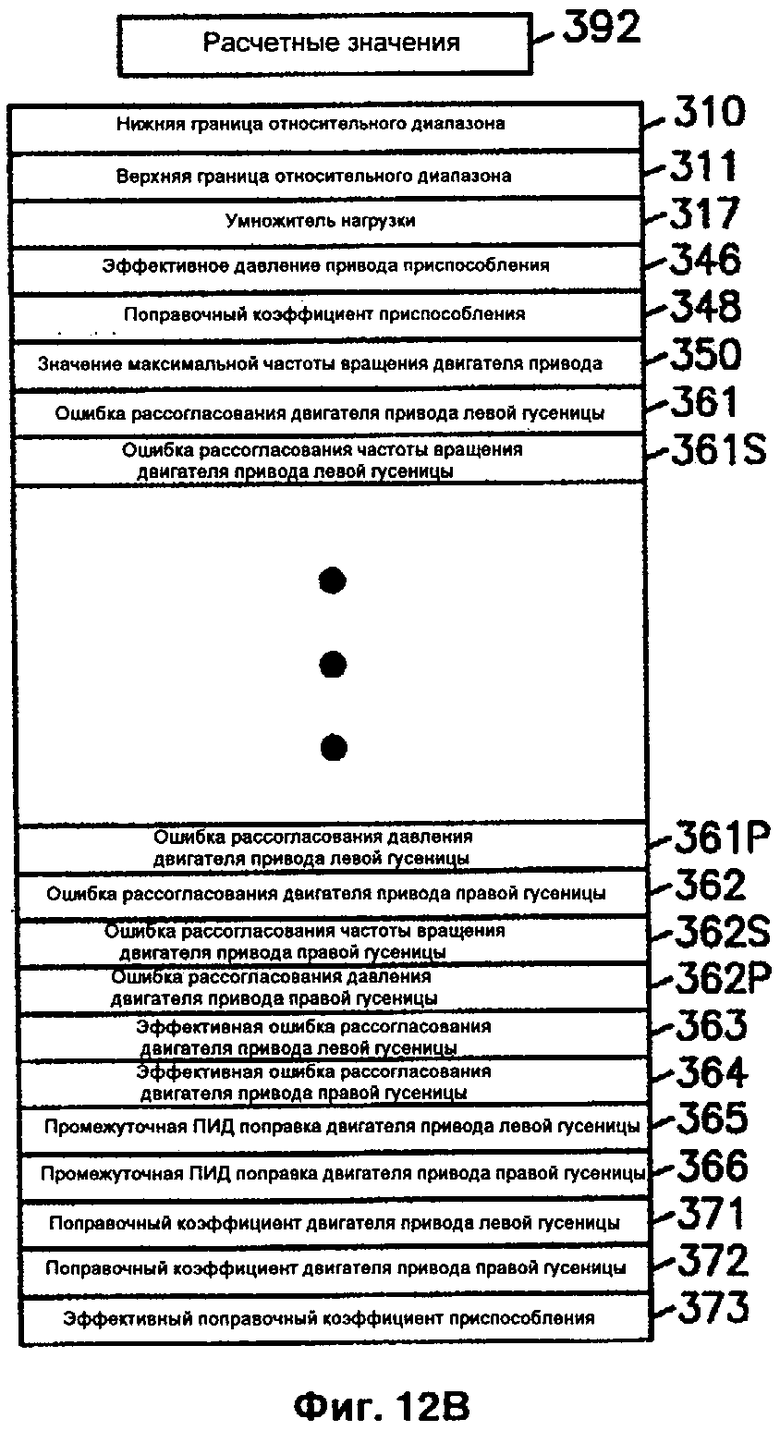
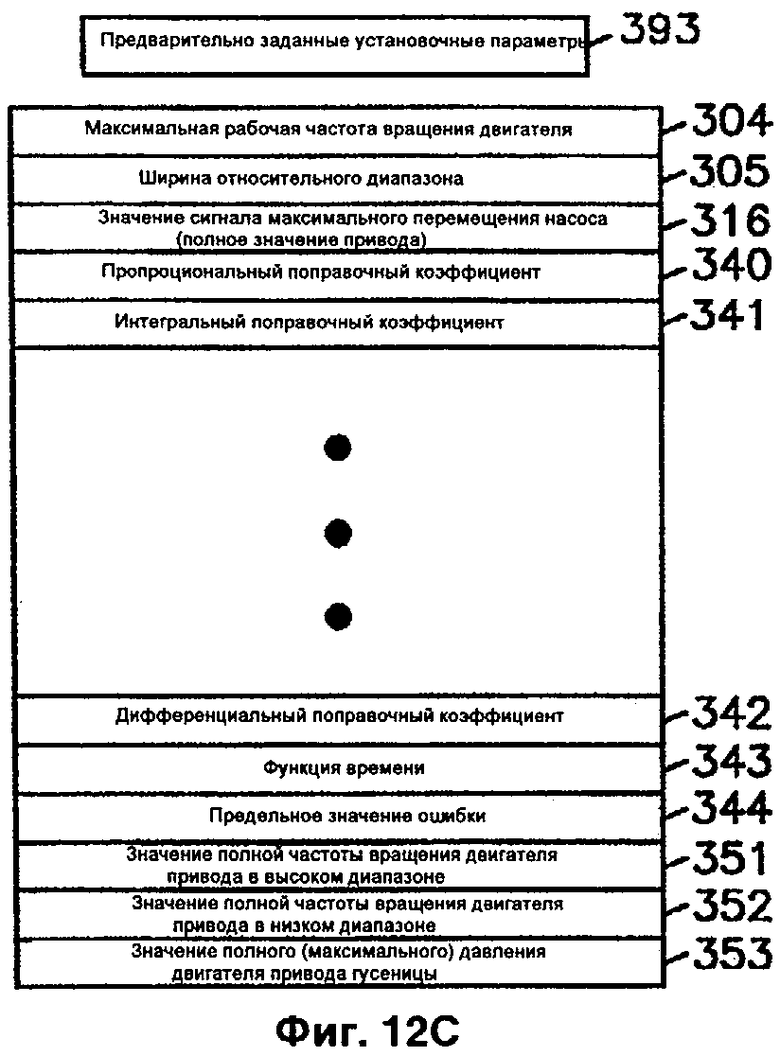
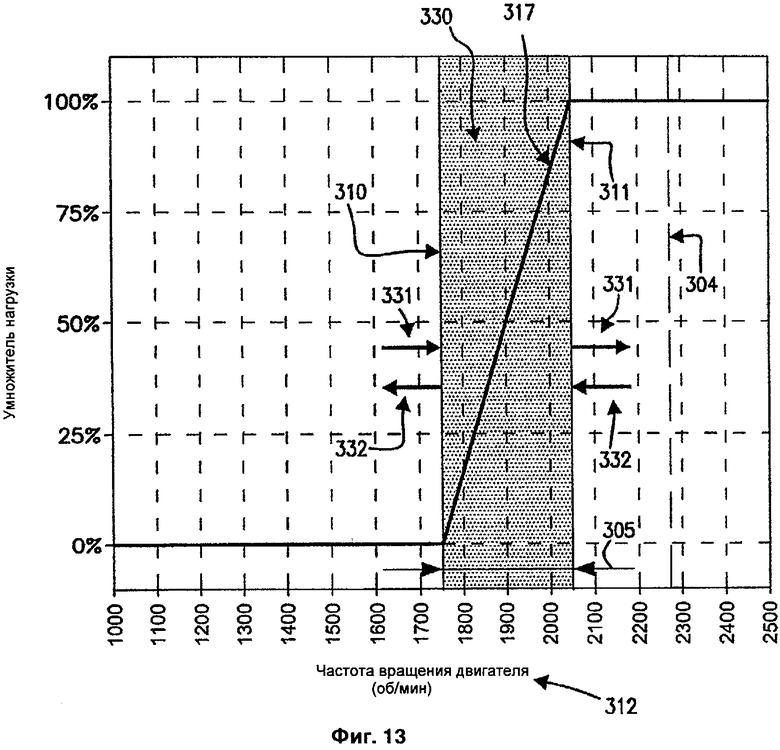
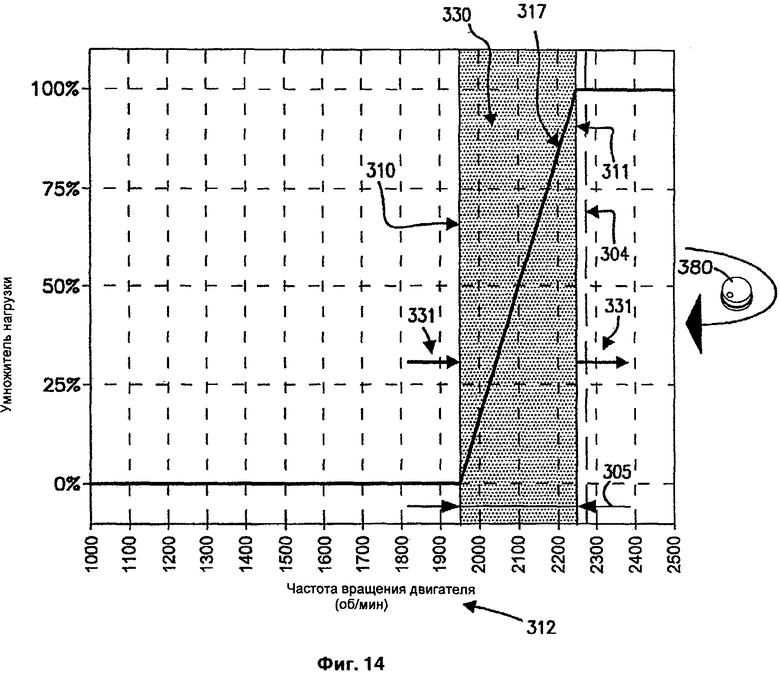
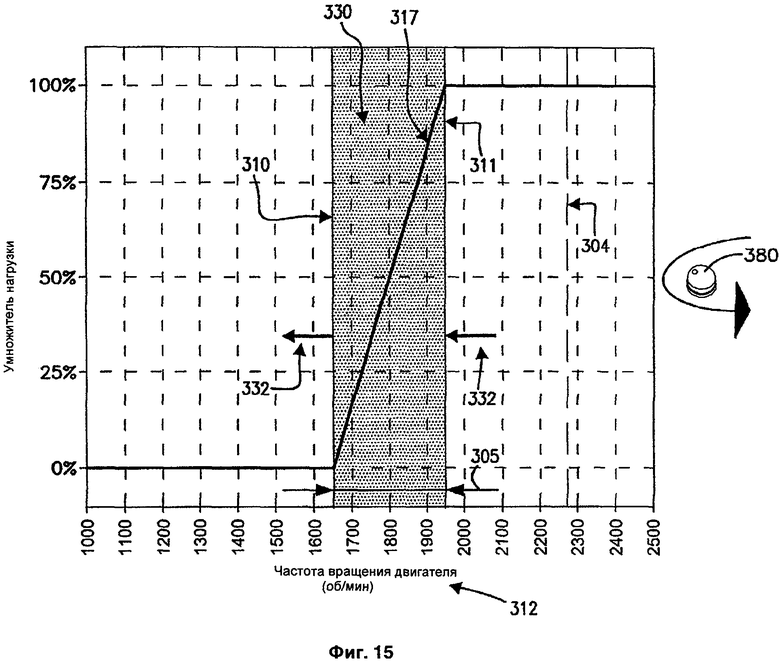
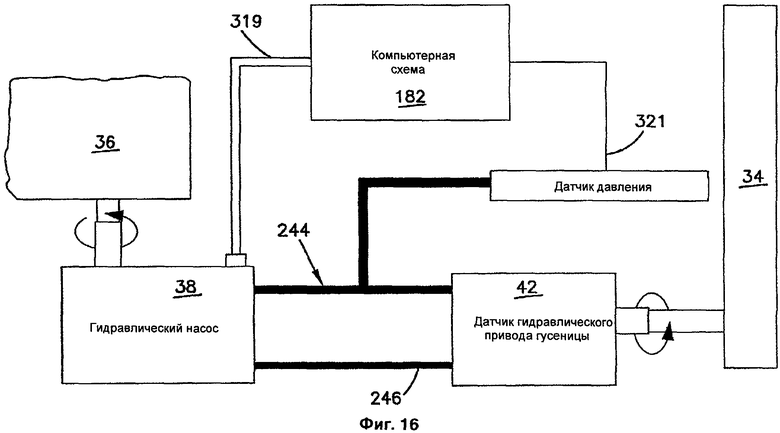
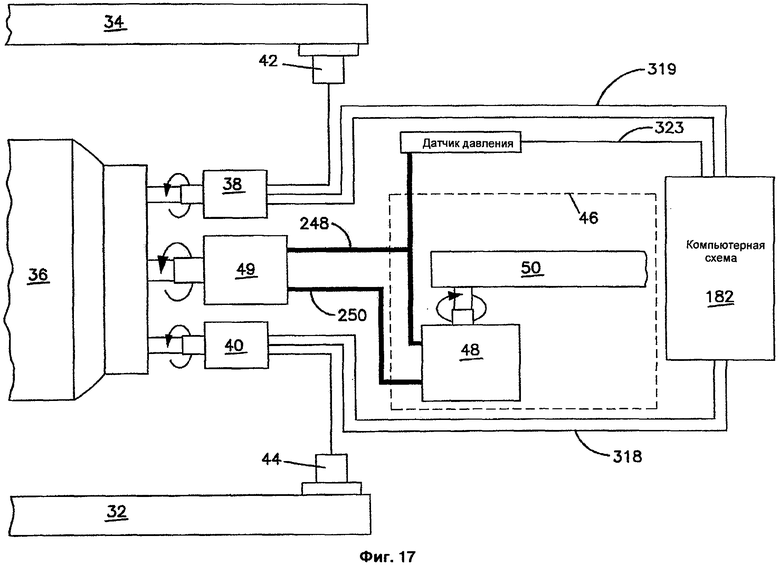
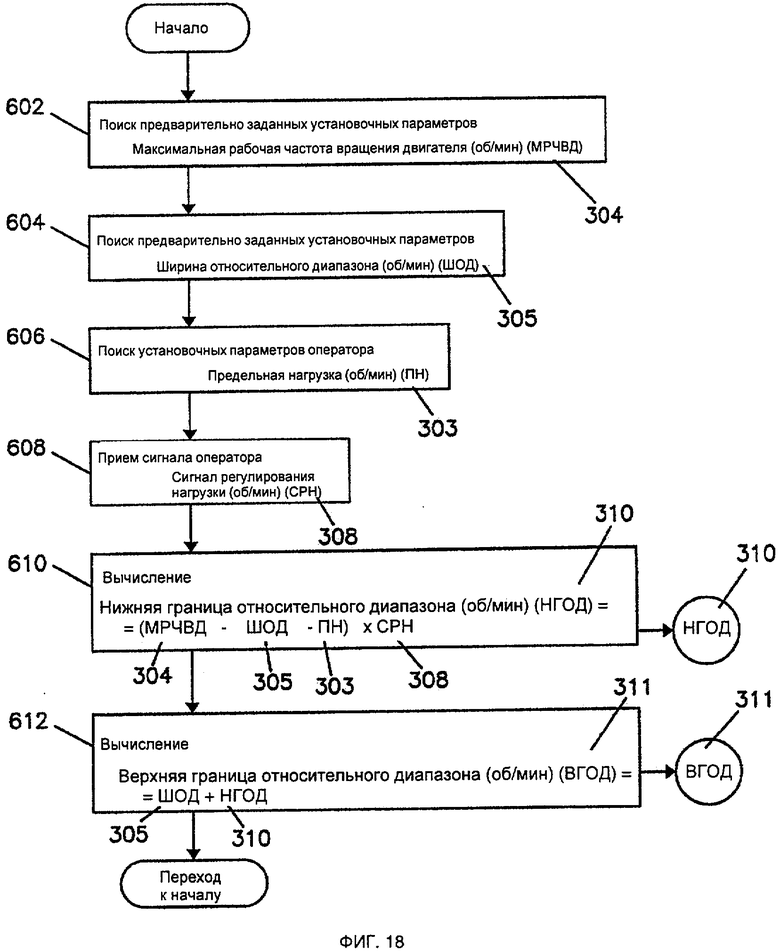
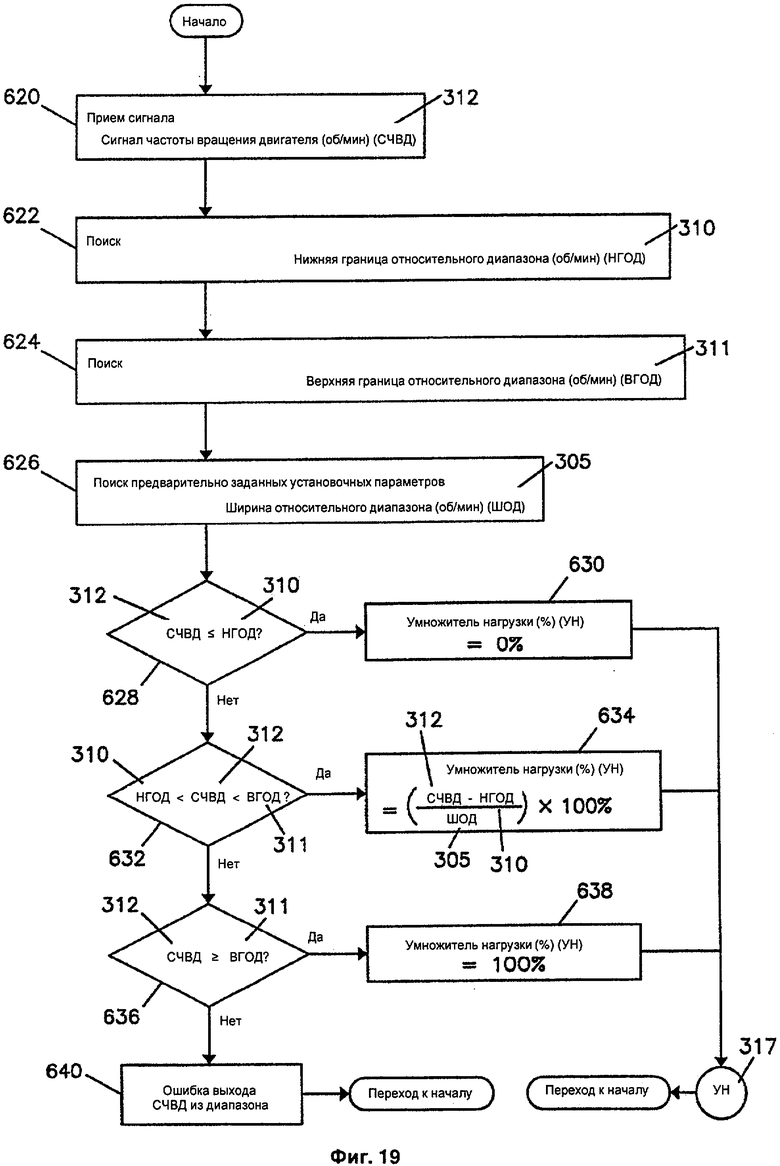
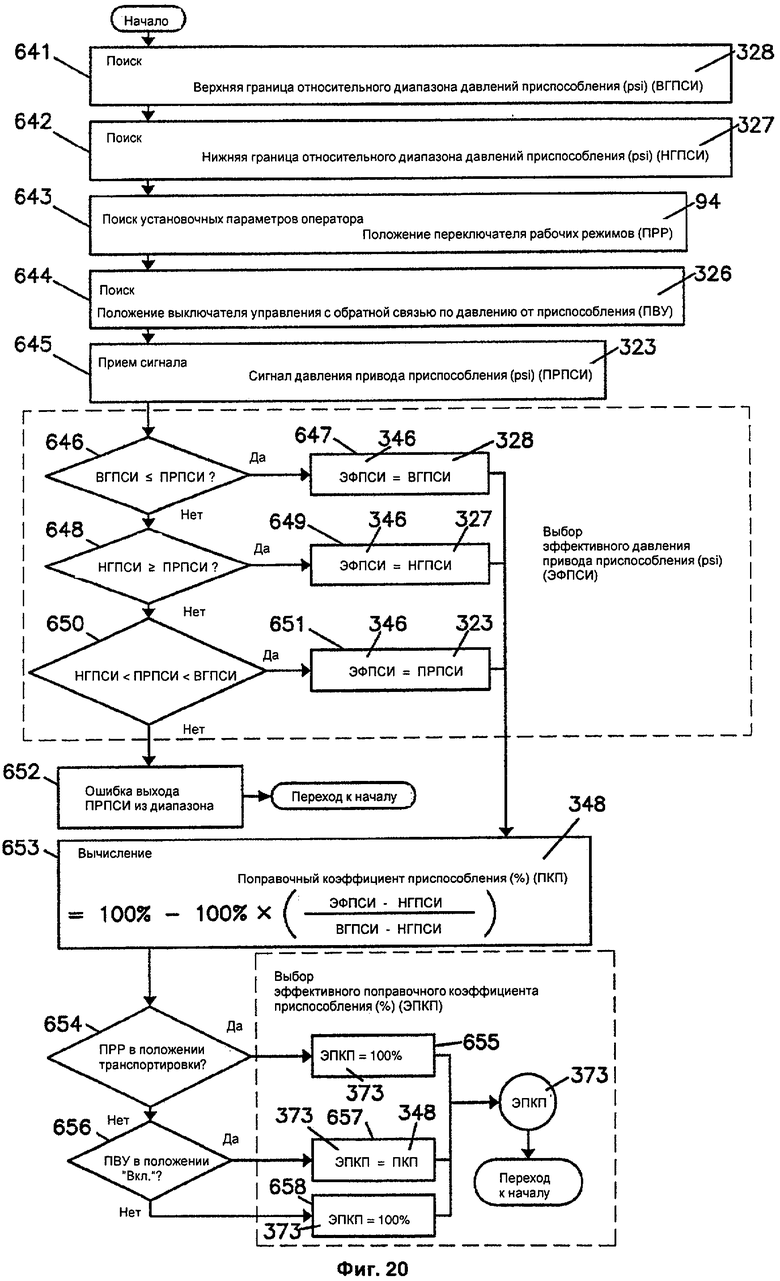
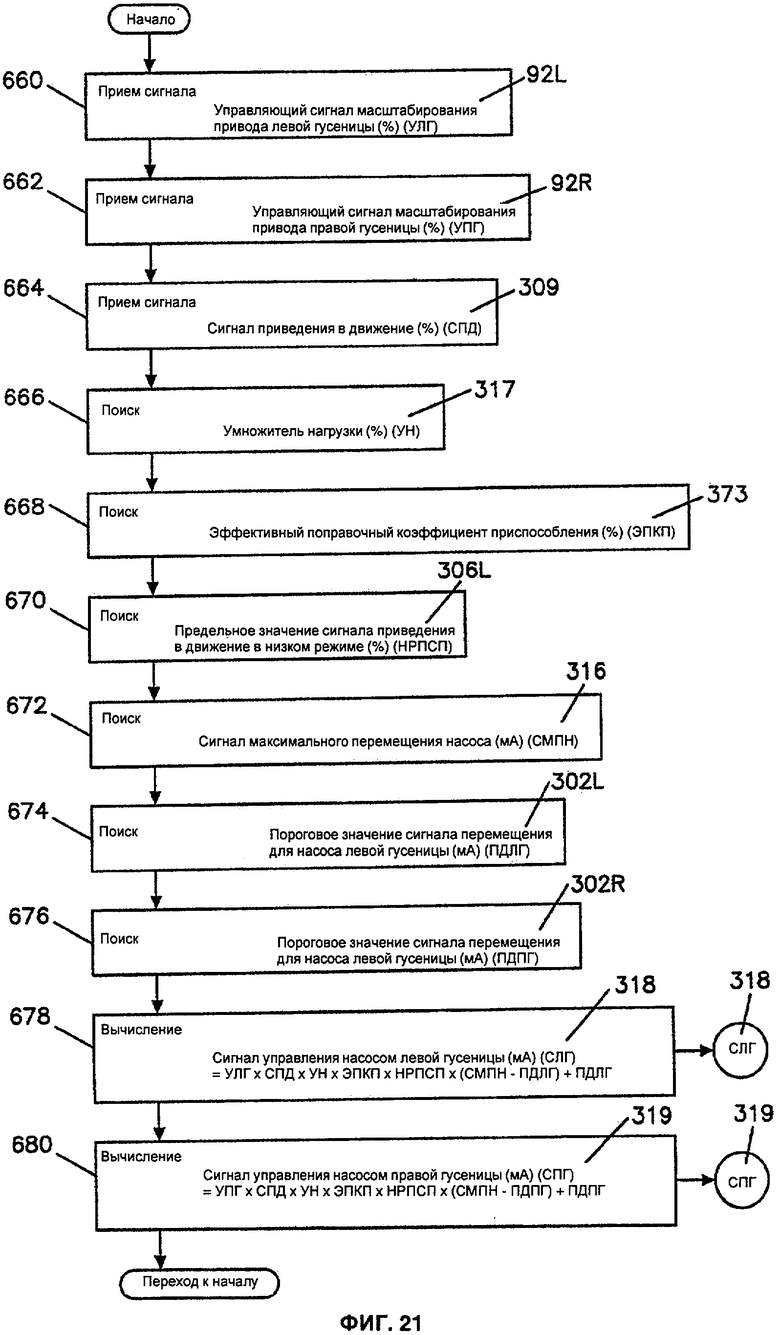
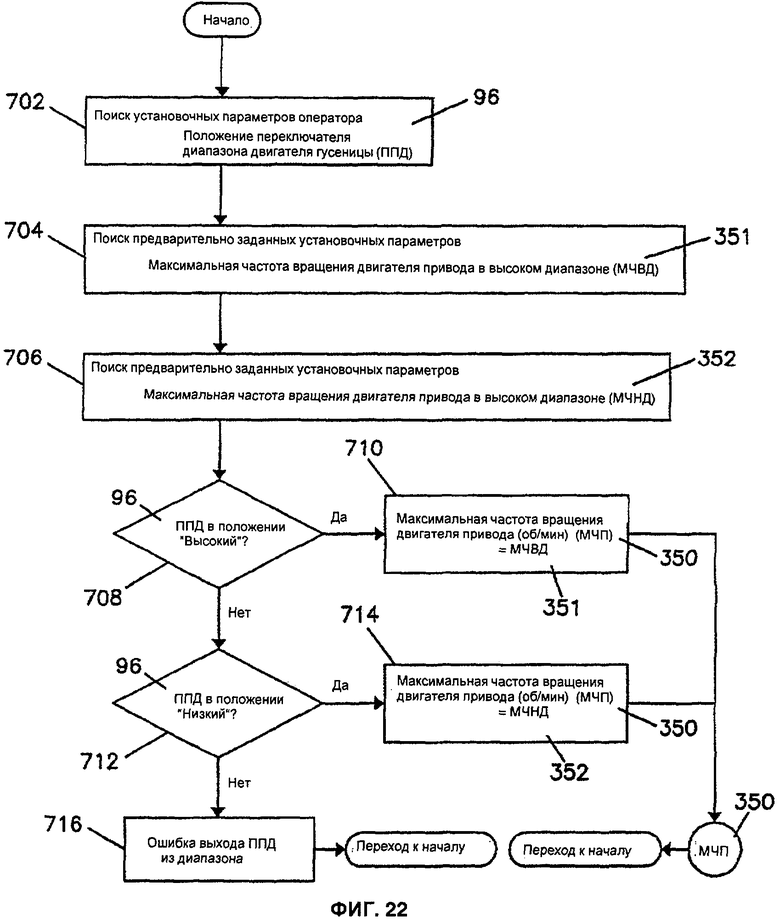
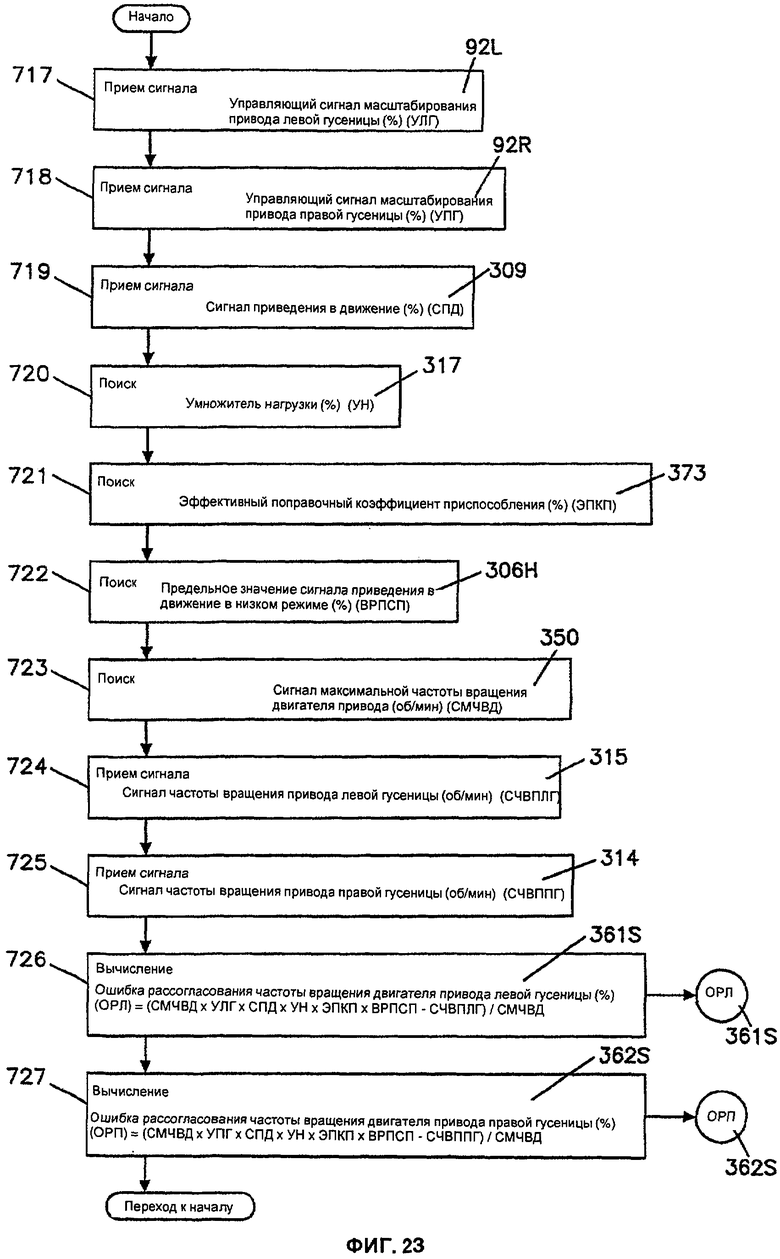
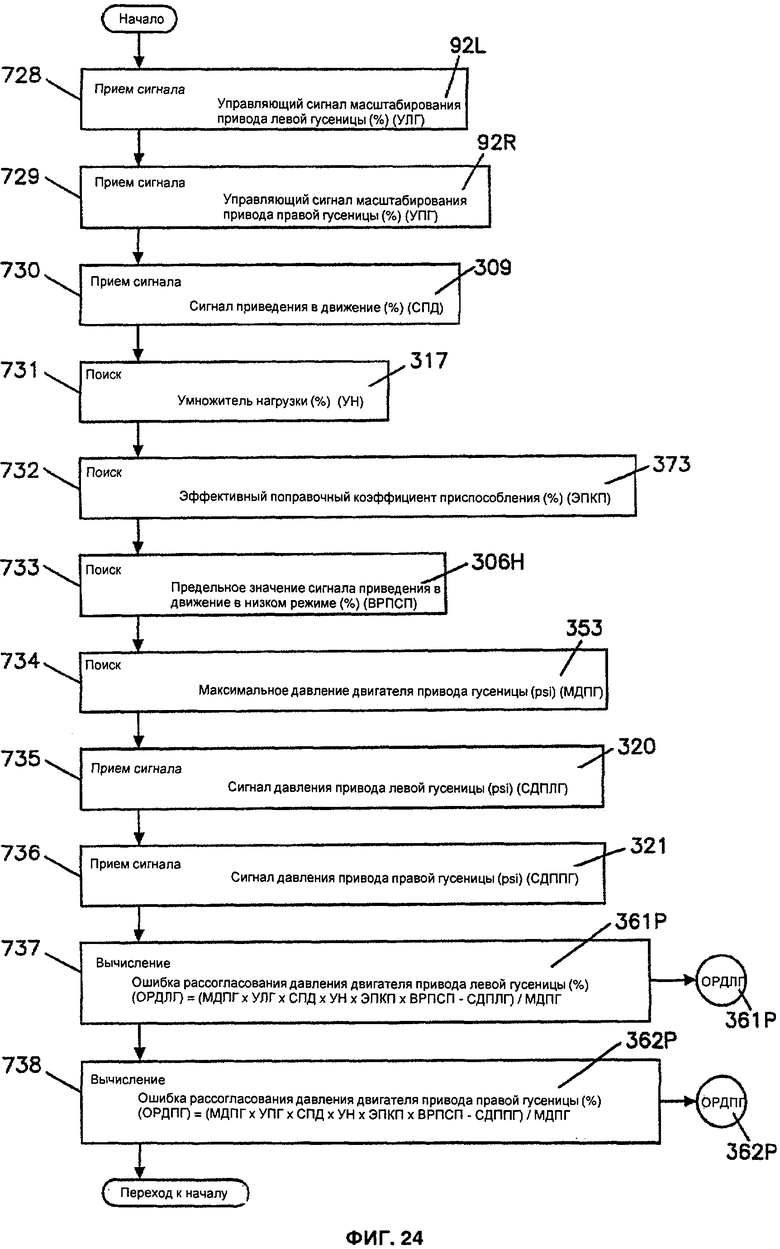
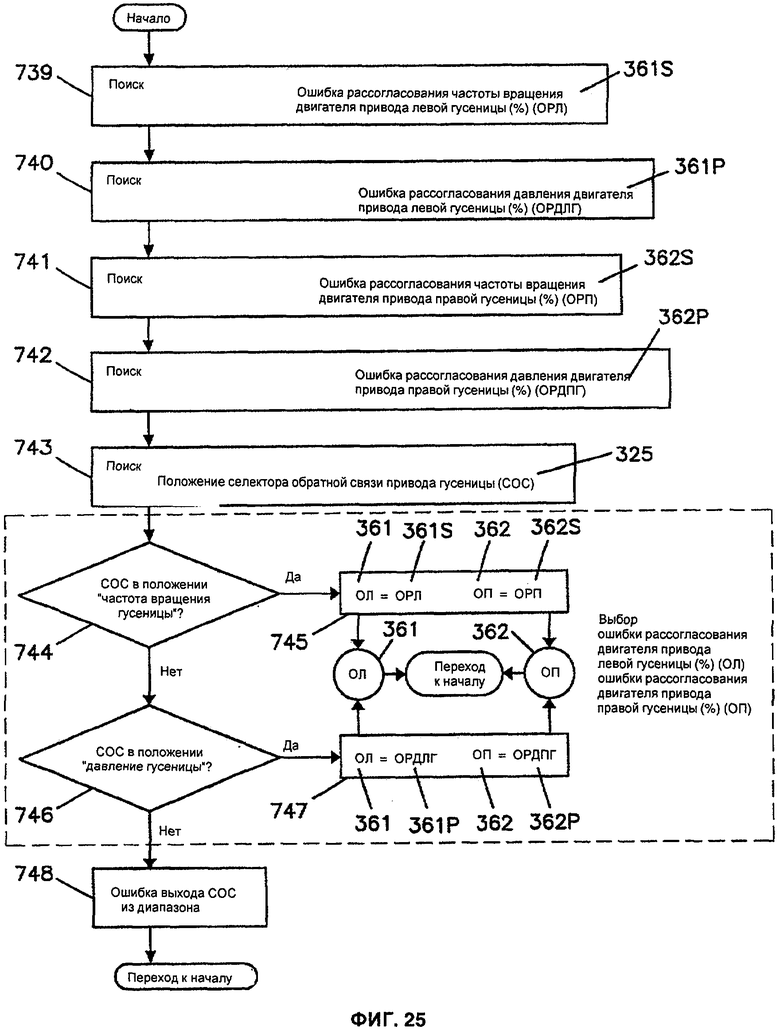
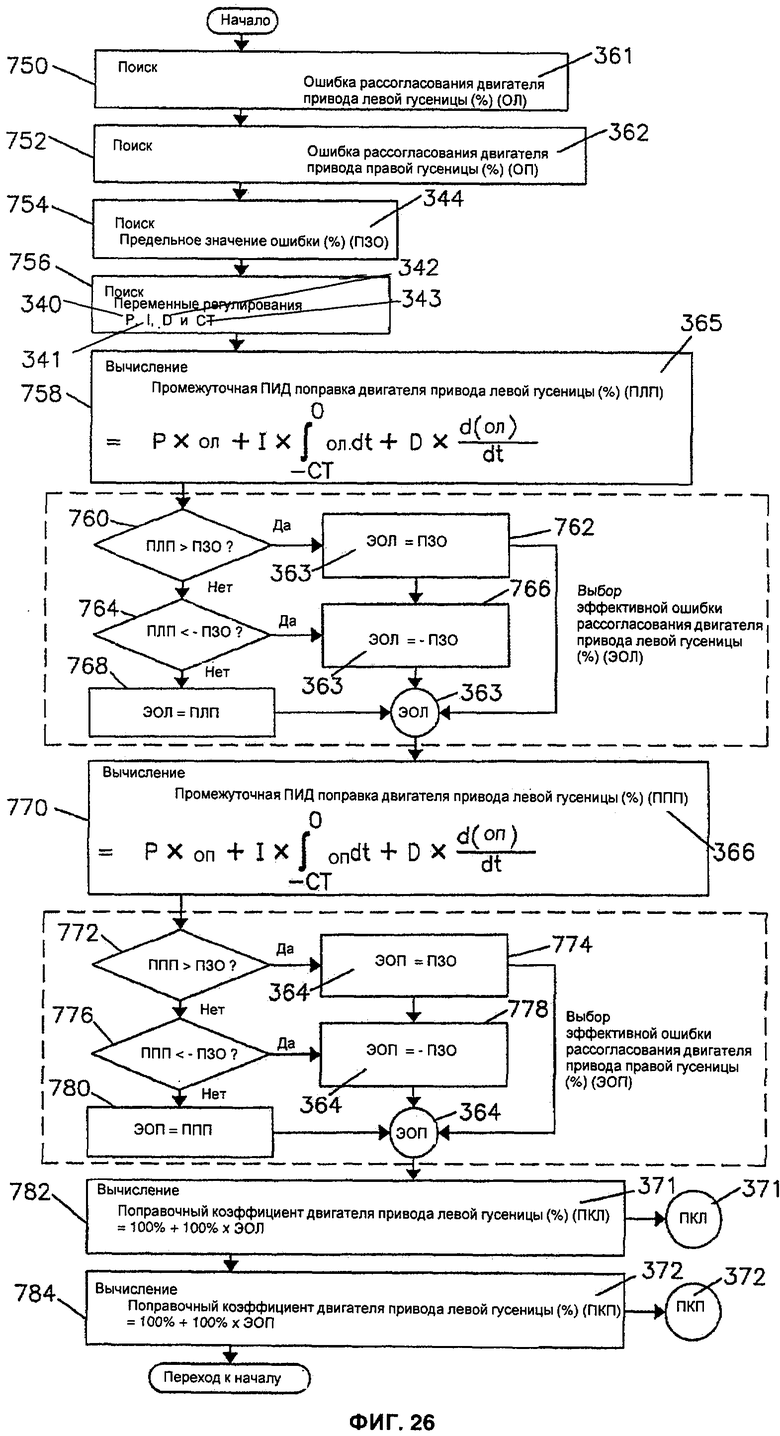
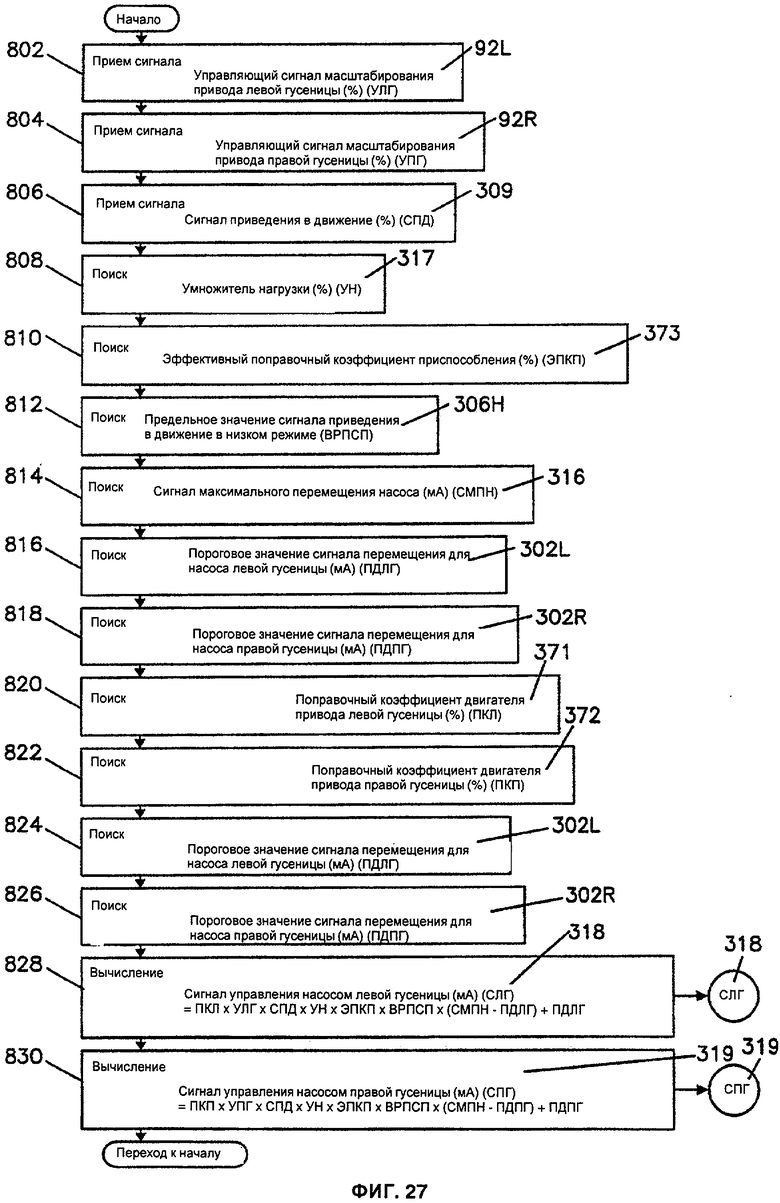
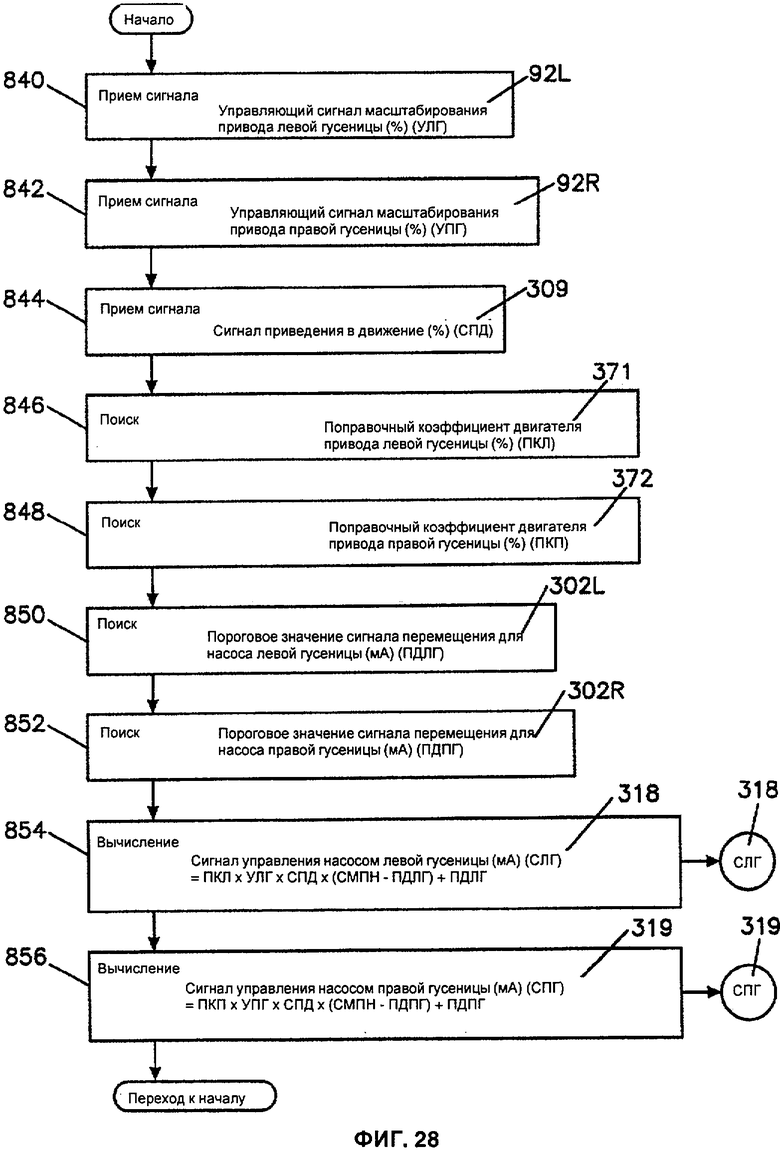
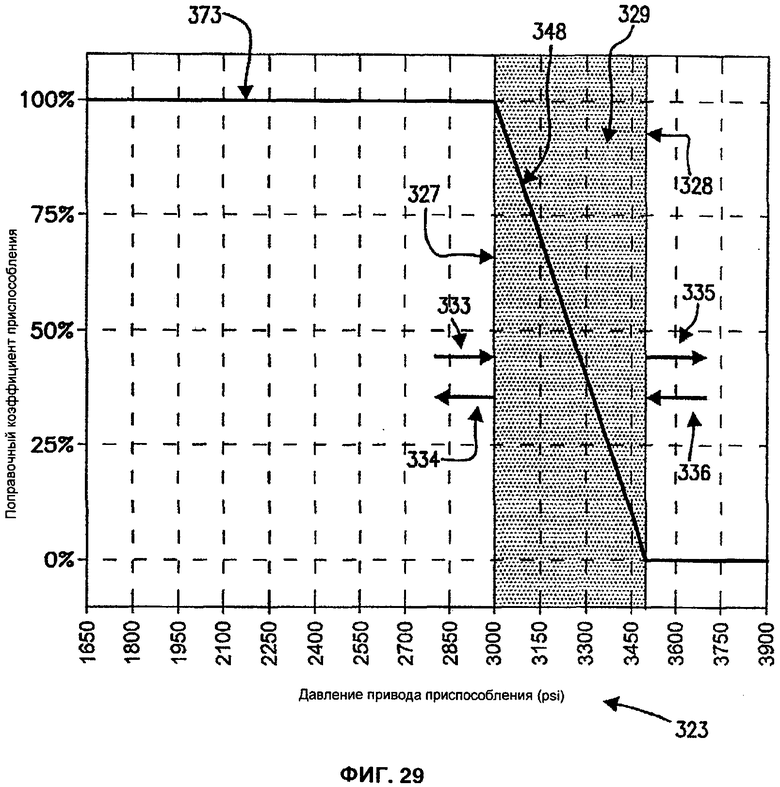
Предложенная группа изобретений относится к системе управления приведением в движение транспортного средства, в частности может использоваться для управления работой экскаватора или канавокопателя. Техническим результатом является снижение до минимума трудоемкости работы транспортного средства как в транспортном режиме, так и в рабочем режиме, и повышение его производительности в различных рабочих режимах. Система управления приведением в движение транспортного средства содержит контроллер, который вырабатывает сигнал приведения в движение транспортного средства, для управления приведением в движение транспортного средства. Причем контроллер использует гидравлическое давление гидростатического привода приспособления в качестве переменной величины для изменения сигнала приведения в движение. Кроме того, указанная система управления содержит множество изменяющих сигнал вводов, которые могут быть использованы для управления эффектом приведения в движение, вызванным сигналом приведения в движение транспортного средства. При этом изменяющие сигнал вводы содержат: первый изменяющий сигнал ввод, полученный от органа управления приведением в движение, которым вручную может управлять оператор канавокопателя; второй изменяющий сигнал ввод, полученный от органа рулевого управления, которым вручную может управлять оператор канавокопателя; третий изменяющий сигнал ввод, полученный от гидравлического давления гидростатического привода приспособления; четвертый изменяющий сигнал ввод, полученный от частоты вращения двигателя; пятый изменяющий сигнал ввод, полученный от частоты вращения или гидравлического давления левого гидростатического привода; и шестой изменяющий сигнал ввод, полученный от частоты вращения или гидравлического давления правого гидростатического привода. 5 н. и 10 з.п. ф-лы, 33 ил.
1. Система управления приведением в движение транспортного средства, которое содержит приспособление для экскавации, приводимое в действие гидростатическим приводом приспособления, который содержит гидравлический насос, питающий гидравлический двигатель, содержащая контроллер, который вырабатывает сигнал приведения в движение транспортного средства, для управления приведением в движение транспортного средства, причем контроллер использует гидравлическое давление гидростатического привода приспособления в качестве переменной величины для изменения сигнала приведения в движение, причем транспортное средство представляет собой канавокопатель, содержащий: левое устройство приведения в движение, которое приводится в движение при помощи левого гидростатического привода, приводимого в действие при помощи двигателя; правое устройство приведения в движение, которое приводится в движение при помощи правого гидростатического привода, приводимого в действие при помощи двигателя; приспособление для экскавации, которое приводится в движение при помощи гидростатического привода указанного приспособления, приводимого в действие при помощи двигателя; и систему управления, которая вырабатывает сигнал приведения в движение транспортного средства, для управления приведением в движение транспортного средства при помощи левого и правого устройств приведения в движение, причем указанная система управления содержит множество изменяющих сигнал вводов, которые могут быть использованы для управления эффектом приведения в движение, вызванным сигналом приведения в движение транспортного средства, причем изменяющие сигнал вводы содержат: первый изменяющий сигнал ввод, полученный от органа управления приведением в движение, которым вручную может управлять оператор канавокопателя; второй изменяющий сигнал ввод, полученный от органа рулевого управления, которым вручную может управлять оператор канавокопателя; третий изменяющий сигнал ввод, полученный от гидравлического давления гидростатического привода приспособления; четвертый изменяющий сигнал ввод, полученный от частоты вращения двигателя; пятый изменяющий сигнал ввод, полученный от частоты вращения или гидравлического давления левого гидростатического привода; и шестой изменяющий сигнал ввод, полученный от частоты вращения или гидравлического давления правого гидростатического привода.
2. Система управления по п. 1, в котором приспособление для экскавации содержит установленную на стреле землеройную цепь.
3. Система управления по п. 1, в которой транспортное средство содержит левый гидростатический привод, который приводит в действие левое устройство приведения в движение транспортного средства, и правый гидростатический привод, который приводит в действие правое устройство приведения в движение транспортного средства.
4. Система управления по п. 3, в которой левое и правое устройства приведения в движение содержат гусеницы.
5. Система управления по п. 1, в котором третий, четвертый, пятый и шестой изменяющие сигнал вводы могут быть включены или выключены оператором.
6. Система управления по п. 1, в которой контроллер использует алгоритм обратной связи для нахождения характерной реакции сигнала управления приведением в движение транспортного средства, причем в указанном алгоритме обратной связи использован поправочный коэффициент приспособления, основанный на гидравлическом давлении гидростатического привода приспособления, для масштабирования сигнала управления приведением в движение транспортного средства, при этом поправочный коэффициент приспособления непрерывно определяют как функцию гидравлического давления гидростатического привода приспособления и при помощи диапазона давлений привода приспособления с верхней границей и нижней границей, причем поправочный коэффициент приспособления выбирают равным 100% на нижней границе и ниже нее и равным 0% на верхней границе и выше нее, и поправочный коэффициент приспособления снижают от 100% до 0% от нижней границы до верхней границы.
7. Система управления по п. 1 или 6, в которой гидростатический привод приспособления приводится в действие при помощи двигателя, имеющего частоту вращения двигателя, причем контроллер использует частоту вращения двигателя в качестве другой переменной для изменения сигнала управления приведением в движение транспортного средства, при этом система управления определяет полосу частот вращения двигателя, и когда частота вращения двигателя находится внутри полосы частот вращения двигателя, величина сигнала управления приведением в движение транспортного средства увеличивается при повышении частоты вращения двигателя и уменьшается при снижении частоты вращения двигателя.
8. Система управления по п. 7, в которой сигнал управления приведением в движение транспортного средства управляет гидростатическим приводом приведения в движение транспортного средства, причем гидростатический привод приведения в движение имеет частоту вращения привода и давление привода, при этом контроллер использует множество выбираемых оператором алгоритмов обратной связи для нахождения характерной реакции сигнала управления приведением в движение транспортного средства, причем множество выбираемых оператором алгоритмов обратной связи включают в себя: первый алгоритм, который использует показатели, основанные на гидравлическом давлении гидростатического привода приспособления, на частоте вращения двигателя и на разности между измеренной частотой вращения привода приведения в движение и расчетной частотой вращения привода приведения в движение, чтобы масштабировать сигнал управления приведением в движение транспортного средства; и второй алгоритм, который использует показатели, основанные на гидравлическом давлении гидростатического привода приспособления, на частоте вращения двигателя и на разности между измеренным давлением привода приведения в движение и расчетным давлением привода приведения в движение, чтобы масштабировать сигнал управления приведением в движение транспортного средства.
9. Система управления по п. 8, которая дополнительно содержит третий алгоритм, который использует гидравлическое давление гидростатического привода приспособления и частоту вращения двигателя в качестве показателей для масштабирования сигнала управления приведением в движение транспортного средства и не использует разность между измеренной частотой вращения привода приведения в движение и расчетной частотой вращения привода приведения в движение или разность между измеренным давлением привода приведения в движение и расчетным давлением привода приведения в движение в качестве показателей для масштабирования сигнала управления приведением в движение транспортного средства.
10. Система управления по п. 1 или 7, в которой приспособление для экскавации содержит цепь для экскавации или колесо для экскавации, приводимые в движение при помощи гидростатического привода приспособления.
11. Система управления приведением в движение транспортного средства, которое содержит приспособление для экскавации, приводимое в действие гидростатическим приводом приспособления, который содержит гидравлический насос, питающий гидравлический двигатель, содержащая контроллер, который вырабатывает сигнал приведения в движение транспортного средства, для управления приведением в движение транспортного средства, причем контроллер использует гидравлическое давление гидростатического привода приспособления в качестве переменной величины для изменения сигнала приведения в движение, при этом система управления образует диапазон давлений приспособления, причем, когда гидравлическое давление гидростатического привода приспособления находится внутри диапазона давлений, величина сигнала приведения в движение транспортного средства снижается в ответ на увеличение гидравлического давления гидростатического привода приспособления и увеличивается в ответ на снижение гидравлического давления гидростатического привода приспособления, причем диапазон давлений имеет верхнюю и нижнюю границы, и в которой величина сигнала приведения в движение транспортного средства не изменяется в ответ на изменение гидравлического давления гидростатического привода приспособления, когда гидравлическое давление гидростатического привода приспособления больше, чем верхняя граница, или меньше, чем нижняя граница.
12. Система управления по п. 11, которая дополнительно содержит панель управления, образующую интерфейс пользователя, позволяющий пользователю перемещать диапазон давлений вверх и вниз в диапазоне гидравлических давлений.
13. Система для управления системой приведения в движение экскаватора, причем система приведения в движение экскаватора содержит левое устройство приведения в движение, приводимое в действие при помощи первого гидростатического привода, и правое устройство приведения в движение, приводимое в действие при помощи второго гидростатического привода, причем первый гидростатический привод и второй гидростатический привод приводятся в действие при помощи двигателя, при этом указанная система содержит: контроллер, который вырабатывает первый выходной сигнал управления первым гидростатическим приводом, позволяющий изменять производительность первого гидростатического привода, и второй выходной сигнал управления вторым гидростатическим приводом, позволяющий изменять производительность второго гидростатического привода, причем контроллер использует алгоритмы обратной связи для нахождения характерной реакции первого выходного сигнала управления первым гидростатическим приводом и второго выходного сигнала управления вторым гидростатическим приводом; причем первый алгоритм обратной связи использует первый пропорционально-интегрально-дифференциальный поправочный коэффициент для масштабирования первого выходного сигнала управления первым гидростатическим приводом, а второй алгоритм обратной связи использует второй пропорционально-интегрально-дифференциальный поправочный коэффициент для масштабирования второго выходного сигнала управления вторым гидростатическим приводом; и при этом первый пропорционально-интегрально-дифференциальный поправочный коэффициент основан на разности между измеренным гидростатическим давлением первого гидростатического привода и расчетным гидростатическим давлением первого гидростатического привода, а второй пропорционально-интегрально-дифференциальный поправочный коэффициент основан на разности между измеренным гидростатическим давлением второго гидростатического привода и расчетным гидростатическим давлением второго гидростатического привода.
14. Система для управления системой приведения в движение экскаватора, причем система приведения в движение экскаватора содержит устройство приведения в движение, приводимое в действие при помощи гидростатического привода приведения в движение, при этом гидростатический привод приведения в движение приводится в действие при помощи двигателя, причем двигатель имеет систему управления частотой вращения двигателя, которая содержит: контроллер, который вырабатывает сигнал приведения в движение транспортного средства, позволяющий изменять производительность гидростатического привода приведения в движение, причем контроллер использует алгоритм обратной связи для нахождения характерной реакции сигнала управления приведением в движение транспортного средства; причем алгоритм обратной связи использует множитель нагрузки, основанный на частоте вращения двигателя, в качестве показателя для масштабирования сигнала управления приведением в движение транспортного средства, при этом множитель нагрузки изменяется непосредственно при изменении частоты вращения двигателя, когда частота вращения двигателя находится в полосе частот вращения двигателя; при этом алгоритм обратной связи также использует поправочный коэффициент приведения в движение, основанный на рабочих характеристиках гидростатического привода приведения в движение, в качестве показателя для масштабирования сигнала управления приведением в движение транспортного средства, причем рабочие характеристики гидростатического привода приведения в движение выбирают из группы, в которую входят: а) разность между измеренным гидравлическим давлением гидростатического привода приведения в движение и расчетным гидравлическим давлением гидростатического привода приведения в движение; и b) разность между измеренной частотой вращения гидростатического привода приведения в движение и расчетной частотой вращения гидростатического привода приведения в движение.
15. Система приведения в действие экскаватора, который содержит двигатель, который приводит в действие гидростатический привод приведения в движение, для приведения в действие устройства приведения в движение экскаватора, причем двигатель имеет частоту вращения двигателя, при этом экскаватор также содержит приспособление для экскавации и исполнительный механизм для подъема и опускания приспособления для экскавации, причем указанная система содержит: контроллер, который вырабатывает сигнал приведения в движение транспортного средства, позволяющий изменять производительность гидростатического привода приведения в движение, который использует множество выбираемых оператором алгоритмов обратной связи для нахождения характерной реакции сигнала управления приведением в движение транспортного средства, при этом множество алгоритмов обратной связи используют множество показателей для нахождения характерной реакции сигнала управления приведением в движение транспортного средства, включающие в себя: умножитель нагрузки, заданный как функция частоты вращения двигателя и при помощи полосы частот вращения двигателя, причем полоса частот вращения двигателя имеет нижнюю границу полосы частот вращения двигателя и верхнюю границу полосы частот вращения двигателя, причем умножитель нагрузки изменяется непосредственно при изменении частоты вращения двигателя, когда частота вращения двигателя находится в полосе частот вращения двигателя; первый поправочный коэффициент приведения в движение, основанный на разности между измеренным гидравлическим давлением гидростатического привода приведения в движение и расчетным гидравлическим давлением гидростатического привода приведения в движение; и второй поправочный коэффициент приведения в движение, основанный на разности между измеренной частотой вращения гидростатического привода приведения в движение и расчетной частотой вращения гидростатического привода приведения в движение.
| US 6766236 B1, 20.07.2004 | |||
| US 3750762 A1, 07.08.1973 | |||
| Реактив для выявления микроструктуры алюминиевых сплавов | 1984 |
|
SU1260716A1 |
| US 5509220 A1, 23.04.1996 | |||
| US 20050278100 A1, 15.12.2005 | |||
| ВСЕСОЮЗНАЯ I n^rr[irHij-i[x^f^^:F-Kd | 0 |
|
SU370063A1 |
| УСТАНОВКА И СПОСОБ ДЛЯ ГРУНТОВАНИЯ ТРУБОПРОВОДА | 1994 |
|
RU2119997C1 |

