Изобретение относится к области автоматического управления подвижными объектами и может быть использовано в машиностроительной, горной и других отраслях промышленности.
Цель изобретения - повышение точности устройства.
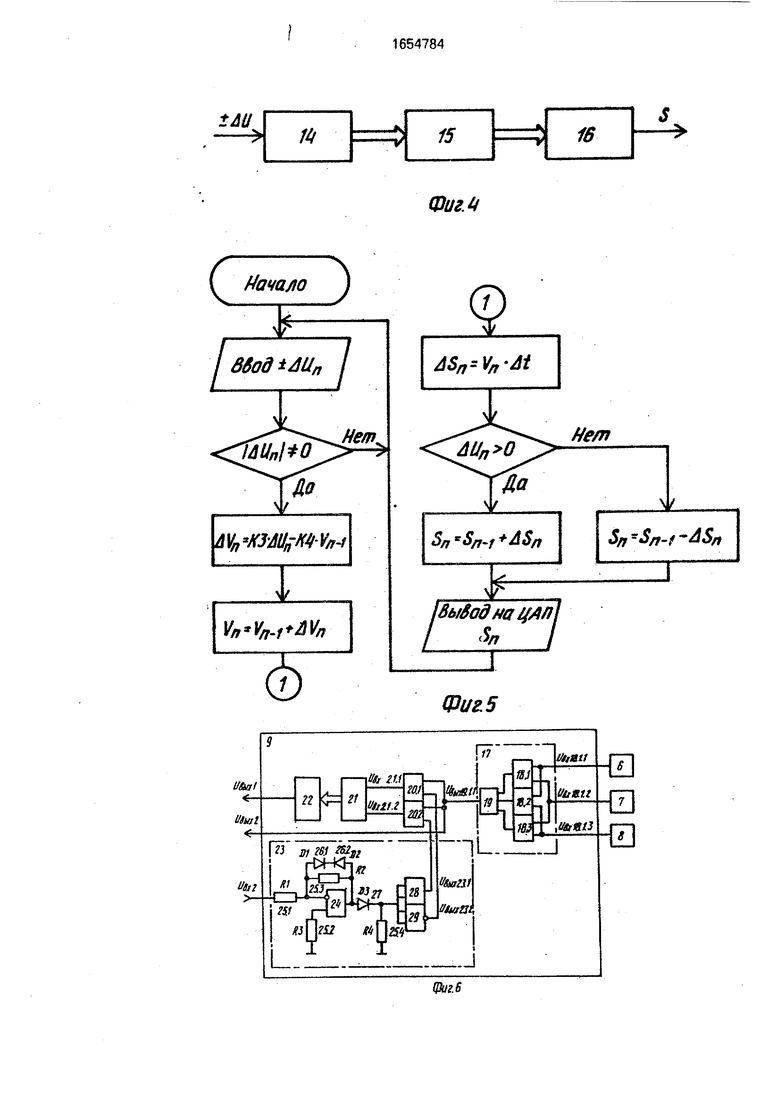
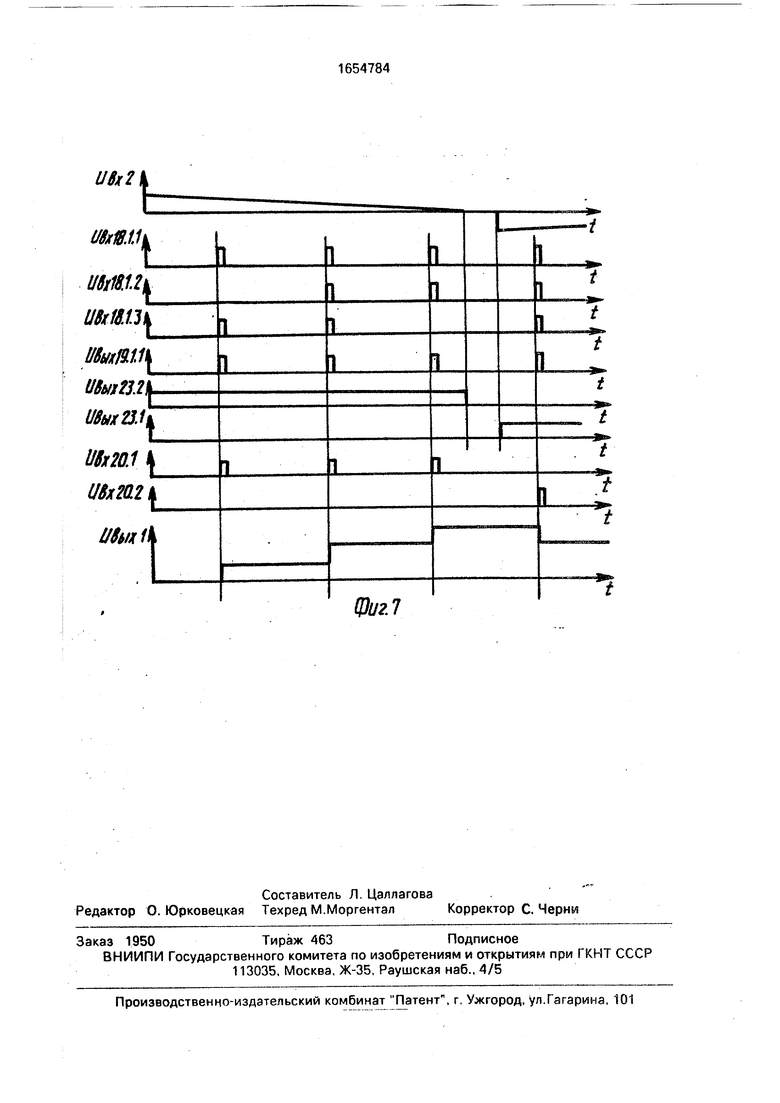
На фиг. 1 изображена блок-схема предлагаемого устройства; на фиг, 2 - пример участка маршрута движения, вдоль которого расположены метки; на фиг. 3 - графики, иллюстрирующие достижение положительного результата при реализации устройства для управления транспортным средством; на фиг. 4 - функциональная схема блока вычисления величины перемещения транспортного средства; на фиг 5 - алгоритм вычисления значений текущей величины перемещения; на фиг. 6 - функциональная схема формирователя опорного сигнала, на фиг. 7 - временная диаграмма, поясняющая работу формирователя опорного сигнала.
Устройство для управления транспортным средством (фиг, 1) содержит последовательно соединенные задатчик 1 положения транспортного средства, первый сумматор 2, блок 3 управления, реверсивный преобразователь 4 и исполнительный механизм 5, а также датчики 6-8 наличия меток, расположенных вдоль маршрута движения транспортного средства, подключенные выходами к первым трем входам формироо ел
4 XI 00
Јь
вателя 9 опорного сигнала. Кроме того, устройство содержит последовательно соединенные блок 10 вычисления величины перемещения транспортного средства, блок 11 сравнения, блок 12 памяти и второй сумматор 13, подключенный выходом к второму входу первого сумматора 2, а вторым входом - к выходу блока 10 вычисления величины перемещения транспортного средства, первый выход формирователя 9 опорного сигнала соединен с вторым входом блока 11 сравнения, второй выход - с входом управления записью блока 12 памяти, а второй вход - с выходом первого сумматора 2 и с входом блока 10 вычисления величины перемещения транспортного средства.
Блок вычисления величины перемещения транспортного средства включает в себя аналого-цифровой преобразователь (АЦП) 14, ЭВИ 15 и цифроаналоговый преобразователь 16.
Формирователь опорного сигнала содержит избирательный блок 17, состоящий из трех элементов 2И 18.1-18.3 и одного элемента ЗИЛИ 19, элементы 2И 20.1 и 20.2, счетчик 21 импульсов цифроаналоговый преобразователь 22, блок 23 определения знака сигнала, состоящий из операционного усилителя 24, четырех резисторов 25.1- 25.4, двух стабилитронов 26.1 и 26.2, диода 27, элементов И 28 и И-НЕ 29.
Устройство работает следующим образом.
Сигнал задания на перемещение с за- датчика 1 положения суммируют в сумматоре 2 с сигналом отрицательной обратной связи. При появлении разницы по величине между сигналами на входах сумматора 2 на его выходе появляется сигнал рассогласования, который поступает в блок 3 управления, на вход блока 10 вычисления величины перемещения транспортного средства и на второй вход формирователя 9 опорного сигнала, по знаку которого формирователь 9 опорного сигнала определяет суммировать или вычитать метки, считываемые датчиками 6-8, т.е.распознает направление движения транспортного средства. В зависимости от знака сигнала на входе блок 3 управления подает команду на реверсивный преобразователь 4, который вырабатывает сигнал напряжения, пропорциональный входному сигналу, и выдает его на электродвигатель исполнительного механизма 5, положительной или отрицательной полярности в зависимости от знака поступившего сигнала, вследствие этого выходной вал электродвигателя исполнительного механизма 5 вращается в прямом или обратном
направлении, а транспортное средство движется вперед или назад. При движении транспортного средства от начальной точки (От. о) до предопределенного задатчиком 1
положения расстояния считываются метки Mi, расположенные вдоль маршрута движения через равные отрезки пути Д Si (фиг. 2), датчиками 6-8, установленными на транспортном средстве. По подсчитываемому ко0 личеству меток формирователь 9 в зависимости от знака сигнала на втором входе этого блока, информирующего о направлении движения транспортного средства, формирует опорный сигнал (фиг. 3,
5 характеристика а). По сигналу рассогласования на входе сумматора 2 непрерывно вычисляется значение текущей величины перемещения транспортного средства (фиг. 3, характеристика б). В блоке 11 сравнения
0 определяют разность сигналов, поступающих с блока 10 вычисления величины перемещения транспортного средства на инверсный вход и с формирователя 9 опорного сигнала на прямой вход. Сигнал разно5 сти с выхода блока 11 сравнения с учетом его знака запоминают в блоке 12 памяти по сигналу, поступающему с второго выхода формирователя 9 опорного сигнала на второй вход блока памяти 12 в моменты считы0 вания очередной метки. Сигнал с блока 10 вычисления величины перемещения транспортного средства суммируют в сумматорре 13 с сигналом, поступающим с блока 12 памяти, и полученный суммарный скорректи5 рованный сигнал (фиг. 3 характеристика 6) инвертируют в этом же блоке, а затем используют в качестве сигнала отрицательной обратной соязи, подавая его с выхода сумматора 13 на второй вход сумматора 2. При
0 равенстве по величине сигналов на двух входах сумматора 2 на его выходе сигнал отсутствует, следовательно, на выходе блока 3 управления отсутствует сигнал, поступающий на вход реверсивного
5 преобразователя 4, поэтому на выходе преобразователя сигнал напряжения равен нулю, электродвигатель исполнительного механизма 5 не получает питающего напряжения, и транспортное средство останавли0 вается. При отсутствии сигнала на выходе сумматора 2 блок 10 вычисления величины перемещения транспортного средства не производит вычислений.
Аналоговый сигнал, поступающий на
5 вход АЦП, преобразуется в параллельный код и считывается ЭВМ. По значению считанного сигнала ЭВМ вычисляет текущее перемещение транспортного средства.
Математическое описание скорости перемещения транспортного средстчя можно
представить в виде апериодического эвена, для которого выходная координата - линейная скорость, а управляющее воздействие - напряжение, подаваемое на вход первого сумматора 2.
+ Vn-i K1 ип,дв,
где Т - механическая постоянная времени транспортного средства;
Vn-i - значение линейной скорости, предшествующее очередному такту вычислений;
Л Vn - изменение линейной скорости за отрезок времени,;
ип,дв - напряжение, подаваемое на электродвигатель;
К1 - коэффициент пропорциональности.
Un, Дв Ди-К2,
где AUn - величина сигнала рассогласования между заданным значением на перемещение и величиной обратной связи по положению;
К2 - коэффициент пропорциональности блока управления и реверсивного преобразователя.)
Запишем апериодическое звено в виде
-K4AVn-i.
Тогда текущее значение линейной скорости определится по выражению
Vn Vn-i+ AVn.
Приращение перемещения за очередной такт расчета определится по выражению
At.
Текущее значение перемещения вычисляется по выражению
Sn Sn-i+ ASn,
где Sn - текущее значение вычисляемого перемещения;
Sn-1 - значение вычисляемого перемещения, предшествующее очередному такту расчета.
Алгоритм вычисления значения величины текущего перемещения в реальном масштабе времени представлен на фиг. 5, где счетчиком времени является таймер ЭВМ.
Алгоритм функционирования и схемная реализация формирователя 9 опорного сигнала (фиг. 1) поясняются функциональной схемой (фиг. 6) и временной диаграммой (фиг. 7). Формирователь 9 опорного сигнала работает следующим образом. При наличии сигналов сдатчиков 6-8 наличия меток (фиг. 1 и 6) хотя бы на двух входах избирательного
блока 17 (Uex.18.1.1, 11вх18.1.2, ивх.18.1.3). состоящего из трех элементов 2И 18,1-18,3 и одного элемента ЗИЛ И 19. на его выходе появляется импульс (фиг. 7, 1)вых. 19.1.1).
Этот импульс поступает на выход формирователя 9 опорного сигнала (11вых.2), далее идет на второй вход блока 12 памяти (фиг. 1) и служит сигналом для записи очередной информации, поступающей на первый вход
блока 12 памяти. Этот же импульс с выхода избирательного блока 177 поступает на счетчик 21 импульсов (фиг. 6) через один из элементов 2И 20.1 или 20.2. т.е. через тот канал, на котором присутствует разрешающий сигнал, поступающий с блока 23 определения знака сигнала.
На вход (11вх2) блока 23 определения знака сигнала подается сигнал рассогласования с выхода сумматора 2 (фиг. 1). В эависимости от знака (полярности) сигнала рассогласования на первом или втором выходе блока 23 определения знака сигнала (ивых.23.1, DBX.23.2) появляется разрешающий сигнал (фиг. 6 и 7). Счетчик 21 импульсов суммирует или вычитает из своего содержимого импульсы в зависимости от того, на какой из двух входов (Квх. 20.1. ивх.20.2) они поступают. Содержимое счетчика 21 выдается через шину данных в виде
параллельного цифрового кода на вход циф- роаналогового преобразователя, ЦАП 22 преобразует сигнал из цифрового в аналоговый и выдает его на выход (1/вых. 1) формирователя 9 опорного сигнала (фиг. 6 и 7).
Формула изобретения
Устройство для управления транспортным средством, содержащее последовательно соединенные задатчик положения транспортного средства, первый сумматор, блок управления, реверсивный преобразователь и исполнительный механизм, а также датчики наличия меток, расположенных
вдоль маршрута движения транспортного средства, подключенные выходами к соответствующим первым входам формирователя опорного сигнала, отличающееся тем, что, с целью повышения точности устройства, оно содержит последовательно соединенные блок вычисления величины перемещения транспортного средства, блок сравнения, блок памяти и второй сумматор, подключенный выходом к второму
входу первого сумматора, а вторым входом - к выходу блока вычисления величины перемещения транспортного средства, первый выход формирователя опорного сигнала соединен с вторым входом блока
сравнения, второй выход - с входом управления записью блока памяти, а второй дом блока вычисления величины перемеще- вход - с выходом первого сумматора и вхо- ния транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1991 |
|
RU2018902C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ДВИЖЕНИЯ СПЕЦИАЛЬНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2582502C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АМПЛИТУДЫ И ФАЗЫ ДИСБАЛАНСА | 1992 |
|
RU2045006C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2530704C1 |
| СПОСОБ БЕССПУТНИКОВОЙ НАВИГАЦИИ | 2016 |
|
RU2642507C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПЕРЕМЕЩЕНИЯ СКЛАДСКИХ ГРУЗОВЫХ ПЛАТФОРМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2619843C1 |
| СПОСОБ И СИСТЕМА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ И ПОЗИЦИОНИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2012 |
|
RU2499714C2 |
| СПОСОБ И СИСТЕМА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ И ПОЗИЦИОНИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2014 |
|
RU2559869C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАССЫ НЕТТО | 1990 |
|
RU2036440C1 |
| Устройство для синхронизации часов по радиоканалу | 1983 |
|
SU1230442A2 |

Изобретение относится к области авто- матического управления подвижными объектами и может быть использовано в машиностроительной, горной и других отраслях промышленности. Цель изобретения - повышение точности устройства. В известном устройстве при управлении транспортным средством задают значение величины перемещения от начальной точки отсчета по определенному маршруту вдоль которого расположены метки, считываемые тремя датчиками наличия меток, установленными на транспортном средстве, выходные сигналы которых подают на формирователь опорного сигнала, формирующий опорный сигнал в соответствии с подсчитываемым количеством меток, сравнивают сигнал обратной связи с сигналом, соответствующим заданному значению величины перемещения, и при совпадении этих сигналов производят останов. Новым в устройстве является вычисление значения текущей величины перемещения, корректирование си(нала. соответствующего значению текущей величины перемещения по опорному сигналу в моменты считывания .череднси метки и использование его в качестве сигнала обратной связи. 7 ил. In
О
W
т
Лг «Л SMS J
с
Начало
)
M XMlfrM-V/r-f
I
Vi, Ґ„.,№
(5
Фиг. И
Д$п--Ч М
Не/п
Sn Sfi-i+ASn
&-1вь/6од на ц/wl I /
I
Фиг, 5
U8x2
фиг 7
| СПОСОБ ПОЛУЧЕНИЯ ТВОРОЖНОЙ ЗАПЕКАНКИ | 1998 |
|
RU2146459C1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
