Изобретение относится к области механизации растениеводства в сельском хозяйстве, в частности, к воздействию пропашных с/х культур с помощью устройств, обеспечивающих при проходах по полю фиксацию своих рабочих органов относительно рядков растений и тем самым автоматизацию ухода за растениями без их повреждений.
Известен способ движения с/х агрегата по спиральной траектории (так называемой спирали из двухцентровых завитков) по патенту N 1782377 [1]. Его недостатками являются сложность, большие трудоемкость и временные затраты по обслуживанию способа, а область применения - обработка больших полей с/х растений энергоемкой техникой, в первую очередь, тракторами.
Однако наиболее близким по технической сущности к предлагаемому устройству является устройство по патенту РФ N 2076586 [2], содержащее радиально установленную поворотную ферму (или балку), одним концом опираемую на ведущее ходовое колесо, другим концом опираемую шарнирно на неподвижную центральную опору, и рабочий орган, установленный на ферме (или балке). Но данное устройство предназначено для уборки навоза с/х животных с круглых площадок, поэтому у него рабочим органом является набор скребков и нет никакой надобности их движения по спиральной траектории.
Технический результат использования предлагаемого устройства заключается в существенном снижении трудозатрат, повышении производительности, качества и автоматизации обработки сравнительно небольших (до нескольких десятков метров в диаметре) приусадебных участков.
Технический результат по применению предлагаемого устройства с набором рабочих органов, предназначенных для обработки рядков растений по спиральной траектории, обеспечивается тем, что устройство снабжено механической передачей с гибкой связью без проскальзывания в зубчатом колесе передачи, коаксиально и неподвижно закрепленном на центральной опоре, второе колесо передачи установлено с возможностью вращения на периферийном участке балки, при этом рабочий орган связан с одной из двух линий гибкой связи и установлен на балке по ходовой посадке для обеспечения своего движения вместе с линией гибкой связи вдоль балки при перемещении балки вокруг центральной опоры за счет движения ведущего ходового колеса.
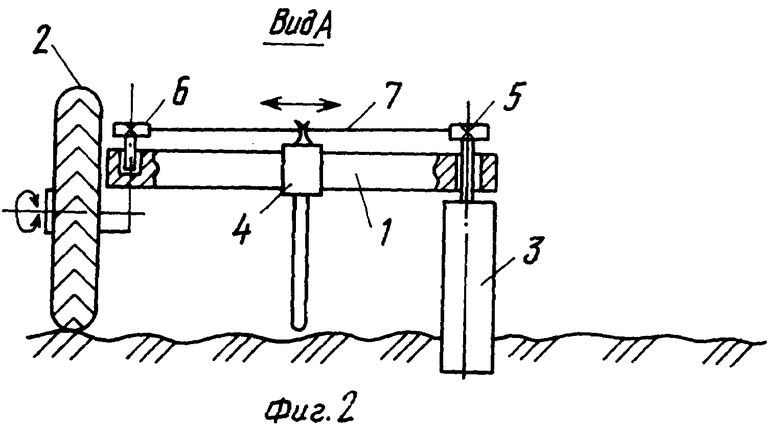
На фиг. 1 и 2 схематично показано устройство в двух видах: соответственно вид сверху и вид сбоку (вид А).
Устройство состоит из поворотной радиальной балки 1, ведущего ходового колеса 2, центральной опоры 3, рабочего органа 4, механической передачи, включающей зубчатое колесо 5, колесо 6 и гибкую связь 7.
В качестве балки 1 можно использовать трубы, швеллер, двутавр и т.п. (т. е. поперечное сечение балки принципиального значения не имеет, лишь бы балка была достаточно жесткой по продольной оси и малой массы), а в качестве механической передачи с гибкой связью без проскальзывания - цепную или зубчато-ременную передачу (хотя в данном устройстве зубчатым должно быть только центральное колесо 5, а колесо 6 необязательно зубчатым), в качестве рабочего органа 4 - плуг и т.п., в качестве ходового колесо 2 - колесо от трактора, в качестве его привода - двигатели различного типа (электрические, внутреннего сгорания и т.п.) с редукторами или без них, а в их отсутствии - тягу крупного домашнего скота или даже ручную тягу.
На фиг. 1 также показаны длинными штрихами окружность - граница обрабатываемого участка - траектория движения ведущего ходового колеса 2, короткими штрихами - спиральная траектория рабочего органа 4.
Ограничением применения устройства является то, что устройством можно обрабатывать сравнительно небольшие участки земли (в основном приусадебные, до нескольких соток гектара площади), так как длина балки 1 (до нескольких десятков метров) ограничена ее предельно допустимой продольной деформацией.
Устройство устанавливают на участке стационарно для неоднократного использования при возделывании культур, начиная от посадки растений для сбора урожая. В первую обработку участка под новые посадки формируют борозды и рядки будущих растений, здесь начало движения рабочего органа по спиральной траектории безразлично (кроме того, возможно реверсивное движение). В последующие обработки начальное положение рабочего органа должно быть строго фиксировано по отношению к сформированным рядкам растений и бороздам между ними. Шаг спиральной траектории определяется радиусом центрального зубчатого колеса 5 механической передачи с гибкой связью 7, поэтому менять параметры этого колеса и соответственно шаг спиральной траектории можно только после уборки урожая до первой обработки участка под новые посадки.
Одним из достоинств устройства является возможность реверсивного движения рабочего органа 4 по спиральной траектории в зависимости от направления поворота балки 1.
Еще одним существенным достоинством данного устройства является высокая надежность его работы в смысле фиксации его рабочего органа 4 относительно рядков растений, что определяется независимостью рабочего органа 4 и его передачи с гибкой связью от возможной пробуксовки ведущего ходового колеса 2, например, на мокрой почве, так как нет никаких передач вращения ходового колеса 2 к рабочему органу 4.
Устройство работает следующим образом.
Рабочий орган 4 устанавливают в исходном положении (для полной обработки участка это должна быть одна из двух крайних точек спиральной траектории). Далее с началом поворота балки 1 за счет движения ведущего ходового колеса 2 движение рабочего органа 4 происходит автоматически. Движение рабочего органа 4 по траектории логарифмической спирали получается как результат двух одновременных движений: одного - по окружности и второго - по радиусу этой окружности.
Формула траектории в полярных координатах следующая:
ρ = ρo+ к • ϕ,
где ρ - текущая величина радиуса положения органа на балке;
ρo - исходная величина радиуса начала отсчета движения;
к - шаг спирали (в данном случае к = r, где r - радиус центрального зубчатого колеса 5);
ϕ - угол поворота (в радианах) балки 1 вокруг центральной опоры 3 относительно начала отсчета движения.
С учетом этой формулы на одной балке в принципе может одновременно использоваться не один, а несколько подвижных рабочих органов, связанных с одной линией гибкой связи и отстоящих друг от друга на расстоянии, кратном шагу спирали, чтобы не нарушить рядки и не повредить растения. При этом повышается производительность труда, может быть применена одновременная обработка участка разными типами рабочих органов, но увеличиваются энергозатраты процесса обработки кратно числу рабочих органов, хотя эти энергозатраты в любом случае значительно меньше энергозатрат при применении традиционной с/х техники, в первую очередь на тракторной тяге. При этом в отличие от колес тракторов ведущее ходовое колесо устройства не нарушает структуру обрабатываемой почвы, так как постоянно движется по своему следу на границе обрабатываемого участка.
Источники информации
1. Патент РФ N 1782377, A 01 B 69/06, 1992. Бюл. N 47.
2. Патент РФ N 2076586, A 01 K 1/00, 1997. Бюл. N 10.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОРМОРАЗДАТЧИК-ДОЗАТОР | 2000 |
|
RU2170008C1 |
| УСТРОЙСТВО ДЛЯ УБОРКИ НАВОЗА | 1994 |
|
RU2076586C1 |
| ДОЗАТОР В.А. СЕДУНОВА | 1999 |
|
RU2163355C1 |
| ПРОБООТБОРНИК В.А.СЕДУНОВА | 1995 |
|
RU2100793C1 |
| Приспособление для мечения животных | 1982 |
|
SU1042715A1 |
| Транспортирующее устройство | 1984 |
|
SU1235478A1 |
| Способ приготовления корма | 1977 |
|
SU634730A1 |
| Устройство для удаления навоза | 1986 |
|
SU1360664A1 |
| СПОСОБ РАЗМНОЖЕНИЯ ПОДВОЕВ | 1999 |
|
RU2165689C1 |
| МОСТОВОЙ АГРЕГАТ ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ РАБОТ | 2003 |
|
RU2255453C2 |
Изобретение относится к области механизации растениеводства в сельском хозяйстве, в частности к возделыванию сельскохозяйственных культур. Устройство содержит радиально установленную поворотную балку, которая одним концом опирается на ведущее ходовое колесо, а другим концом шарнирно соединена с неподвижной центральной опорой. Механическая передача имеет гибкую связь без проскальзывания в зубчатом колесе передачи, неподвижно закрепленном на центральной опоре. Второе колесо передачи установлено с возможностью вращения на периферийном участке балки. Рабочий орган связан с одной из двух линий гибкой связи и установлен на балке по ходовой посадке для движения вместе с линией гибкой связи вдоль балки при ее вращении вокруг центральной опоры за счет движения ведущего ходового колеса. Такое конструктивное выполнение позволит снизить трудозатраты, повысить производительность, качество и автоматизацию спиральной обработки приусадебных участков площадью до нескольких соток гектара. 2 ил.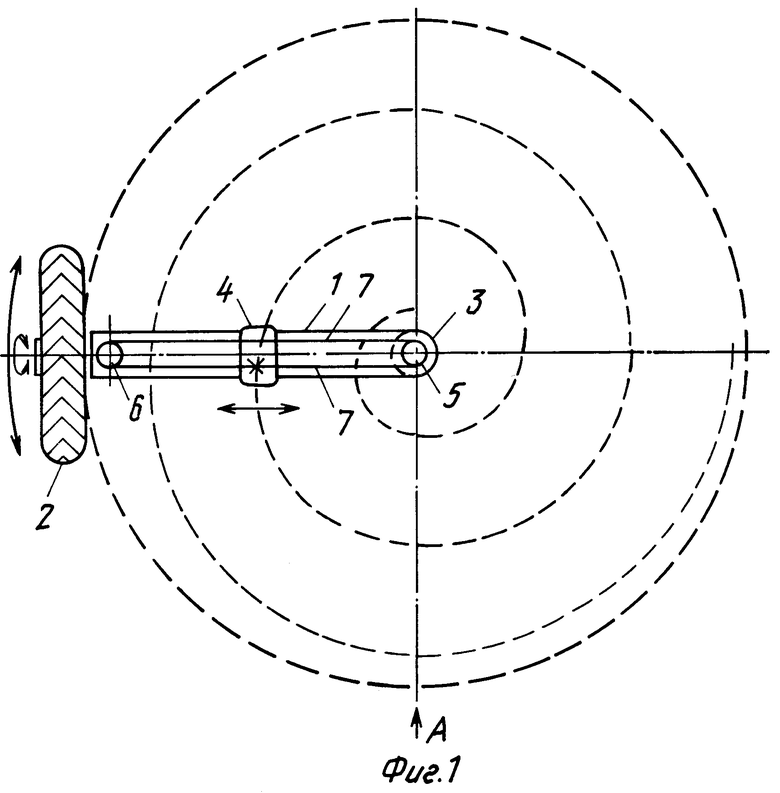
Устройство для движения рабочего органа по спиральной траектории, содержащее радиально установленную поворотную балку, одним концом опираемую на ведущее ходовое колесо, другим концом опираемую шарнирно на неподвижную центральную опору, и рабочий орган, установленный на балке, отличающееся тем, что оно снабжено механической передачей с гибкой связью без проскальзывания в зубчатом колесе передачи, коаксиально и неподвижно закрепленном на центральной опоре, второе колесо передачи установлено с возможностью вращения на периферийном участке балки, при этом рабочий орган связан с одной из двух линий гибкой связи и установлен на балке по ходовой посадке для обеспечения своего движения вместе с линией гибкой связи вдоль балки при перемещении балки вокруг центральной опоры за счет движения ведущего ходового колеса.
| RU 2055455 C1, 10.03.1996 | |||
| УСТРОЙСТВО ДЛЯ УБОРКИ НАВОЗА | 1994 |
|
RU2076586C1 |
| Устройство для канатной тяги сельскохозяйственных орудий по спирали | 1932 |
|
SU29059A1 |
| Способ движения сельскохозяйственного агрегата по спиральной траектории | 1990 |
|
SU1782377A1 |
| Устройство для передвижения сельскохозяйственных орудий | 1934 |
|
SU44075A1 |
