Изобретение относится к транспортным машинам, а именно к одноколесным моторным экипажам.
Известен одноколесный экипаж, содержащий раму, ходовое колесо и педальный механизм мускульного привода (FR 2697792, B 62 K 1/00, 1992).
Недостаток его заключается в том, что мускульные усилия передаются на ходовое колесо через промежуточное звено - педальный механизм.
Наиболее близким к изобретению по технической сущности и достигаемому результату является одноколесный моторный экипаж, включающий раму с приводом (двигатель, передаточный механизм), ходовое и управляющие колеса (SU 7851, B 62 K 1/00, B 62 D 61/12, 28.02.1929).
Недостаток данного экипажа заключается в повышенной металлоемкости вследствие применения конструктивных схем привода общего назначения.
Целью изобретения является снижение металлоемкости привода одноколесного моторного экипажа.
Указанная цель достигается тем, что в одноколесном моторном экипаже, содержащем раму, привод, ходовое и управляющее колеса, охваченные бесконечной направляющей, аккумулятор, рама снабжена постоянными магнитами, а ходовое колесо - электромагнитами с образованием статора и ротора электродвигателя привода соответственно.
На чертеже изображен одноколесный моторный экипаж, вид сбоку.
Одноколесный моторный экипаж содержит аккумулятор 1, установленный на раме 2, снабженной постоянными магнитами 3 и ходовое колесо 4 с электромагнитами 5, охваченное с управляющим колесом 6 бесконечной направляющей 7.
Одноколесный моторный экипаж работает следующим образом. При прохождении электрического тока аккумулятора 1 по катушкам ходового колеса 4 возникают электромагниты 5, положение полюсов которых зависит от направления тока. В момент, когда разноименные полюсы ходового колеса 4 и рамы 2 оказываются друг против друга, с помощью коллектора переключается направление движения тока в катушках ходового колеса 4 на обратное. При этом меняются полюсы электромагнитов 5 ходового колеса 4: северный полюс N становится южным S, южный полюс S - северным N. Вследствие этого в момент наибольшего сближения притяжение между полюсами переходит в отталкивание до следующего притяжения и противостояния разноименных полюсов. Вращающий момент, получаемый от взаимодействия электромагнитов 5 ходового колеса 4 с постоянными магнитами 3 рамы 2, вызывает качение ходового колеса 4 и управляющего колеса 6 по бесконечной направляющей 7 и зависит от силы тока и количества взаимодействующих полюсов электромагнитов с постоянными магнитами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНОКОЛЕСНЫЙ МОТОРНЫЙ ЭКИПАЖ | 1997 |
|
RU2144881C1 |
| ОДНОКОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2018 |
|
RU2707486C1 |
| ОДНОКОЛЕСНЫЙ МОТОРНЫЙ ЭКИПАЖ | 1993 |
|
RU2080013C1 |
| ИМПУЛЬСНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ДЛЯ ПЕРЕДВИЖНЫХ СРЕДСТВ (ВАРИАНТЫ) | 2001 |
|
RU2172261C1 |
| МОТОР-ГЕНЕРАТОР С МАГНИТНЫМИ КОНЦЕНТРАТОРАМИ | 2019 |
|
RU2708635C1 |
| МАГНИТОГИДРОПУЛЬСОР | 2012 |
|
RU2539225C2 |
| ВЕЛОЭЛЕКТРОМОБИЛЬ | 2021 |
|
RU2769261C1 |
| СИСТЕМА ЭЛЕКТРОННОГО УПРАВЛЕНИЯ БЕСКОЛЛЕКТОРНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ (ВАРИАНТЫ) | 2018 |
|
RU2674993C1 |
| ЛИНЕЙНЫЙ МАГНИТНЫЙ ДВИГАТЕЛЬ | 2003 |
|
RU2276447C2 |
| ЭЛЕКТРОПРИВОД ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2024 |
|
RU2828907C1 |
Изобретение относится к конструкции одноколесных транспортных средств. Одноколесный моторный экипаж содержит раму (2), аккумулятор (1), ходовое мотор-колесо (4) и управляющее колесо (6), охваченные бесконечным ремнем (7). Рама (2) снабжена постоянными магнитами (3), а ходовое колесо (4) - электромагнитами (5) для образования статора и ротора электродвигателя привода соответственно. Предлагаемое техническое решение направлено на облегчение одноколесного транспортного средства. 1 ил.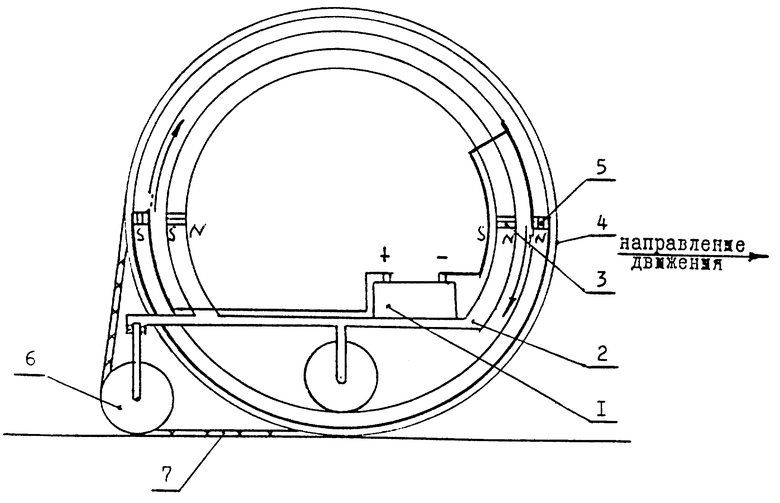
Одноколесный моторный экипаж, содержащий раму, привод, ходовое и управляющее колеса, отличающийся тем, что введен аккумулятор, ходовое и управляющее колеса охвачены бесконечной направляющей, рама снабжена постоянными магнитами, а ходовое колесо - электромагнитами с образованием статора и ротора электродвигателя привода соответственно.
| ОДНОКОЛЕСНЫЙ ЭКИПАЖ | 1925 |
|
SU7851A1 |
| GB 1436799, 26.05.1976 | |||
| US 5509492, 23.04.1996. | |||
