Изобретение касается способа и системы для оптимизации измерений, выполняемых с помощью градиометра ускорения силы тяжести, применительно к вторичной добыче нефти, а более конкретно, способа усовершенствования измерения градиента ускорения силы тяжести для вторичной добычи нефти, в котором для оптимизации добычи выявляется и осуществляется управление подземной границей или границей раздела между добываемой нефтью и текучей средой, вытесняющей нефть из коллектора, а еще более конкретно, касается способа для оптимизации измерений градиометром ускорения силы тяжести, в котором с помощью градиометра ускорения силы тяжести осуществляется контроль аномалий гравитационного поля, вызванных изменениями плотности и контрастами, обусловленными перемещением со временем подземной границы раздела между добываемой нефтью и текучей средой, вытесняющей нефть из коллектора или восстанавливающей пластовое давление.
Углеводородные коллекторы, нефтяные и газовые, образуются вследствие превращения органического вещества в различные виды углеводородных материалов, включая угли, смолы, нефти и природный газ. Предполагается, что нефтяные и газовые коллекторы образуются, когда более легкие углеводородные молекулы просачиваются к поверхности земли до тех пор, пока они не захватываются в относительно проницаемом пласте под относительно непроницаемом пластом, который "закупоривает" проницаемый пласт. Более легкие углеводородные молекулы продолжают накапливаться в относительно больших подземных коллекторах, часто они сопровождаются молекулами воды. Поскольку коллекторы существуют на различных глубинах в толще земли, они часто находятся под существенным геостатическим давлением.
Углеводородные ресурсы извлекаются из поверхностных и подземных месторождений путем разработки месторождений твердых ресурсов (уголь, смолы) и путем откачки или с помощью других способов извлечения природного газа и жидкой нефти из естественным образом возникающих подземных месторождений.
В последнем столетии природный газ и нефть извлекались с помощью бурения скважин в подземные коллекторы. Вообще, большинство коллекторов в естественном состоянии находилось под давлением из-за наличия свободного природного газа, который накапливался над жидким нефтяным пластом, и часто из-за наличия воды, которая накапливалась ниже жидкого нефтяного пласта. Поскольку залегающая в естественных условиях сырая нефть имеет плотность ниже, чем плотность воды (т.е. в диапазоне от 0,7 в случае "легкой" сырой нефти до 0,9 в случае "тяжелой" сырой нефти), сырая нефть накапливается выше водопроницаемого пласта и ниже газопроницаемого пласта. Следовательно, скважина, пробуренная в нефтепроницаемом пласте, будет давать нефть, которая получает энергию, обеспечивающую ее вытеснение, от лежащего выше газопроницаемого пласта и/или от лежащего ниже водопроницаемого пласта.
Вообще "первичная" добыча сырой нефти происходит в течение временного периода, когда естественное пластовое давление вызывает выдавливание сырой нефти наверх через буровую скважину. В некоторой точке эксплуатационного ресурса коллектора возникающее естественным образом пластовое давление фактически исчерпывается. Несколько различных методов, в общем известных как методы вторичной добычи, разработаны для извлечения сырой нефти после того, как понижается естественное пластовое давление. Обычно вторичная добыча включает восстановление пластового давления с помощью текучей среды (т.е. жидкости или газа) для понижения вязкости нефти и/или для вытеснения оставшейся сырой нефти в нефтепроницаемом слое к поверхности через одну или несколько скважин. Вытесняющая текучая среда вводится в коллектор с помощью нагнетательных скважин, через которые вытесняющая текучая среда закачивается в коллектор под давлением для того, чтобы смещать и, тем самым, вытеснять нефть в направлении добывающих скважин и к скважинам.
Для размещения нагнетательных скважин разработаны различные схемы. Например, линия, по которой размещаются нагнетательные скважины, может быть на известной границе коллектора или вблизи от нее, для того чтобы вытеснять сырую нефть в направлении добывающих скважин и к скважинам. Когда граница между находящейся под давлением текучей средой выдвигается вперед, проходя через добывающие скважины, эти добывающие скважины могут быть заглушены или, если требуется, преобразованы в нагнетательные скважины. По другой схеме нагнетательные скважины "вкрапливают" между добывающими скважинами для вытеснения нефти из нефтепроницаемого пласта от места нагнетания в направлении добывающих скважин и непосредственно к добывающим скважинам.
Для осуществления восстановления пластового давления и смещения требующейся сырой нефти из основной породы или нефтеносного песчаного пласта в направлении добывающих скважин, используются различные текучие среды, включая воду при различных температурах, пар, двуокись углерода и азот.
В технологии с закачкой воды вода при температуре окружающей среды нагнетается в коллектор для вытеснения нефти в направлении добывающих скважин и к скважинам. Нагнетаемая вода накапливается под сырой нефтью и фактически выталкивает сырую нефть с более низкой плотностью наверх в направлении ствола добывающей скважины и к нему. В тех случаях, когда нефтепроницаемый пласт является относительно тонким, исходя из геологической перспективы, а также ограничен между двумя относительно менее проницаемыми пластами (т.е. непроницаемым пластом, лежащим выше коллектора, и более проницаемый пластом, лежащим ниже коллектора), вода нагнетается при относительно высоком давлении и в таком объеме, чтобы реализовался режим "краевого вытеснения", благодаря чему сырая нефть выталкивается к нефтедобывающим скважинам. Иногда нагнетаемая вода нагревается для понижения вязкости нефти и, тем самым, перемещение сырой нефти из пор проницаемого песчаного пласта или основной породы. Технология с закачкой воды также хорошо подходит для вытеснения к добывающей скважине природного газа, "захваченного" в порах относительно малопроницаемой породы.
В технологии с закачкой пара пар используется для перемещения или вытеснения нефти из нефтеносного песка или нефтеносной породы в направлении добывающих скважин и к скважинам. Пар, который может быть в исходном состоянии перегретым, нагнетается в нефтепроницаемый пласт, чтобы вызвать восстановление пластового давления. По мере движения пара от начальной точки нагнетания его температура падает, а качество пара ухудшается, причем пар в конечном счете конденсируется в виде слоя горячей воды. Кроме того, некоторые из наиболее легких углеводородов могут быть перегнаны из сырой нефти, когда они подвергаются перемещению на границе раздела между паром/горячей водой и сырой нефтью. Нагнетание пара может быть непрерывным или на основе периодического режима "закачка-остановка".
Помимо использования воды и пара для осуществления восстановления пластового давления и вытеснения сырой нефти к добывающим скважинам также для тех же целей используются двуокись углерода и азот.
Одна из проблем, связанных с технологией вытеснения водой, паром или газом, состоит в определении границы или границы раздела между вытесняющей текучей средой и сырой нефтью. В оптимальном варианте граница между вытесняющей текучей средой и перемещаемой сырой нефтью смещалась бы предсказуемым образом через коллектор от точек нагнетания к добывающим скважинам, чтобы обеспечить максимальное получение сырой нефти. Геология коллектора обычно сложная и неоднородная и часто он содержит области или зоны с относительно более высокопроницаемым песком или породой; эти зоны с более высокой проницаемостью могут функционировать как пути с низким сопротивлением для находящейся под давлением вытесняющей текучей среды. Находящаяся под давлением вытесняющая текучая среда иногда образует каналы низкого сопротивления, известные как "воровские" зоны (зоны поглощения), через которые находящаяся под давлением текучая среда "пробивается" к добывающей скважине, вследствие чего значительно уменьшается эффективность добычи.
Наличие возможности определять положение границы раздела или контура и часто неотчетливого между смещаемой сырой нефтью и вытесняющей текучей средой, находящейся под давлением, чтобы отслеживать скорость смещения и морфологию этой границы и осуществлять управление ею, значительно увеличило бы вторичную добычу нефти.
Различные технологии разработаны для улучшения понимания конфигурации подземной геологии нефтепроницаемого коллектора. Наиболее широко используемый метод включает сейсмический эхоконтроль, при котором волна сжатия направляется вниз в подземные пласты. Начальная энергия "опрашивающей" волны обычно создается путем детонации взрывчатых веществ или с помощью специальных ударяющих в землю машин. "Опрашивающая" волна излучается из места расположения источника со скоростью распространения, зависящей от модуля упругости и плотности материала, через который она проходит. Как любая волновая энергия, "опрашивающая" волна подвергается отражению, преломлению, рассеянию, поглощению и ослабляющим эффектам, вызванным материалом, через который она проходит и от которого она отражается. Энергия отраженной волны детектируется геофонами, разнесенными пространственно от местонахождения сейсмоисточника, и данные обрабатываются для получения модели коллектора. Этот метод является хорошо разработанным и он подходит для выявления подземных структур, которые могут быть благоприятными для накопления нефти или газа.
Другие методы исследования подземной геологии включают использование гравиметров для выявления незначительных изменений в величине вектора ускорения силы тяжести с целью выявления подземных структур, которые могут быть благоприятными для накопления нефти или газа.
Различные устройства и методы, используемые для "опрашивания" подземных пластов, привели к значительному прогрессу в возможности создания 3-мерной модели или имитационного моделирования коллектора. Однако существующие технологии зондирования не позволяют выявлять местонахождение и морфологию границы или границы раздела между находящейся под давлением вытесняющей текучей средой и нефтью или природным газом в тех коллекторах, из которых добыча ведется вторичными методами. Информация о положении, морфологии и скорости перемещения границы представляла бы значительную ценность при оптимизации добычи углеводородов, которые добываются вторичными методами, особенно в вопросе эффективного использования вытесняющей текучей среды.
Исходя из вышеизложенного целью настоящего изобретения, наряду с другими, является создание способа усовершенствования измерений градиента ускорения силы тяжести, выполняемого с помощью градиометра в случае добычи текучих углеводородов, таких как нефть и природный газ, из нефтяного и/или газового коллектора, в которых осуществляется восстановление пластового давления.
Другая цель настоящего изобретения состоит в создании способа усовершенствования измерения градиента ускорения силы тяжести, выполняемого с помощью градиометра в случае вторичной добычи углеводородов, при котором находящаяся под давлением текучая среда используется для вытеснения нефти и/или природного газа из коллектора к добывающей скважине.
Еще одна цель настоящего изобретения состоит в создании способа для вторичной добычи нефти, при котором может быть определена граница или граница раздела между добываемой нефтью и находящейся под давлением текучей средой, вытесняющей добываемую нефть.
Дальнейшая цель настоящего изобретения состоит в создании способа повышения точности измерений, выполняемых с помощью градиометра ускорения силы тяжести, в случае вторичной добычи углеводородов, при которой граница или граница раздела между добываемым углеводородом и находящейся под давлением текучей средой, вытесняющей углеводород, может быть определена и впоследствии ею можно управлять для обеспечения максимальной добычи.
Указанные цели достигаются тем, что способ усовершенствования измерения градиента ускорения силы тяжести при использовании градиометра типа акселерометра, имеющего, по меньшей мере, одну пару акселерометров, вращающихся по орбите вокруг оси вращения в общей плоскости, воспринимающих изменения градиента ускорения силы тяжести при их движении по своим соответствующим орбитам и исходя из них обеспечивающих формирование соответствующих выходных электрических сигналов, содержит следующие операции:
размещение градиометра ускорения силы тяжести в точке наблюдения;
осуществление наклона общей плоскости на первый угол ниже локального горизонта и ориентирование оси по направлению с первым азимутом;
снятие данных в течение выбранного временного интервала при направлении с первым азимутом;
осуществление наклона общей плоскости на первый угол выше локального горизонта;
снятие данных в течение выбранного временного интервала при направлении с первым азимутом;
переориентирование оси на направление со вторым азимутом, смещенным на 90 градусов относительно направления с первым азимутом;
снятие данных в течение выбранного временного интервала при первом угле выше локального горизонта и при направлении со вторым азимутом;
осуществление наклона общей плоскости на первый угол ниже локального горизонта;
снятие данных в течение выбранного временного интервала при первом угле ниже локального горизонта при направлении со вторым азимутом;
усреднение разностей между сериями измерений при направлениях с первым азимутом и со вторым азимутом для компенсации систематических ошибок конкретного измерительного прибора и градиентов, обусловленных конкретным измерительным прибором.
Первый угол может составлять менее 1 градуса. Первый угол может составлять 0,9 градуса.
Указанные цели достигаются и тем, что способ усовершенствования измерения градиента ускорения силы тяжести при использовании градиометра типа акселерометра, имеющего, по меньшей мере, одну пару акселерометров, вращающихся по орбите вокруг оси вращения в общей плоскости, воспринимающих изменения градиента ускорения силы тяжести при их движении по своим соответствующим орбитам и исходя из них обеспечивающих формирование соответствующих выходных электрических сигналов, содержит следующие операции:
размещение градиометра ускорения силы тяжести в точке наблюдения;
осуществление наклона общей плоскости на первый угол выше локального горизонта и ориентирование оси по направлению с первым азимутом;
снятие данных в течение выбранного временного интервала при направлении с первым азимутом;
осуществление наклона общей плоскости на первый угол ниже локального горизонта;
снятие данных в течение выбранного временного интервала при направлении с первым азимутом;
переориентирование оси на направление со вторым азимутом, смещенным на 90 градусов относительно направления с первым азимутом;
снятие данных в течение выбранного временного интервала при первом угле ниже локального горизонта и при направлении со вторым азимутом;
осуществление наклона общей плоскости на первый угол выше локального горизонта;
снятие данных в течение выбранного временного интервала при первом угле выше локального горизонта при направлении со вторым азимутом;
усреднение разностей между сериями измерений при направлениях с первым и вторым азимутом для компенсации систематических ошибок конкретного измерительного прибора и градиентов, обусловленных конкретным измерительным прибором.
Первый угол может составлять менее 1 градуса. Первый угол может составлять 0,9 градуса.
Другие цели и преимущества настоящего изобретения станут очевидными из нижеследующего подробного описаниями в сочетании с прилагаемыми чертежами, на которых аналогичные части обозначены одинаковыми позициями.
Настоящее изобретение описывается ниже с помощью примера со ссылкой на прилагаемые чертежи, на которых:
фиг. 1 изображает поперечное сечение нефтеносной ловушки или коллектора, из которого добывают нефть вторичными методами, показывающий в идеализированном виде границу раздела между вытесняющей текучей средой и смещаемой нефтью;
фиг. 1А - идеализированное схематичное представление границы раздела между вытесняющей текучей средой и смещаемой нефтью;
фиг.1В - идеализированное представление контраста по плотности на границе раздела, показанной на фиг.1А;
фиг. 2 - вид сверху коллектора, представленного на фиг.1, показывающий границу нефти в виде полосы из точечного пунктира в случае прямолинейной конфигурации вытеснения;
фиг. 3 - вид фиг.2, показывающий нефтяную границу, смещенную от положения, показанного на фиг.2;
фиг.4 - пример пятиточечной конфигурации добычи;
фиг. 5 иллюстрирует, каким образом возмущается однородное гравитационное поле при введении какой-либо массы;
фиг.5А - вид сверху поля, показанного на фиг.5;
фиг. 6 - изометрический вид предпочтительного градиометра ускорения силы тяжести с вырезом выбранных участков для получения большей ясности;
фиг. 7 - функциональную блок-схему, показывающую каким образом обрабатывается выходной сигнал акселерометра, входящего в градиометр ускорения силы тяжести, показанный на фиг.6;
фиг.8 представляет математический вывод для протокола, зависящего от конкретного устройства, для исключения систематических ошибок измерительного прибора и собственных градиентов;
фиг.9 представляет математический вывод для протокола, зависящего от конкретного устройства, для того чтобы исключить горизонтальные градиенты из оценок градиента кривизны и оценить горизонтальные градиенты, обе операции объединены с компенсацией систематической ошибки измерительного прибора и собственных градиентов;
фиг. 10А и 10В - схему последовательности операций тестового протокола для получения множества серий данных; и
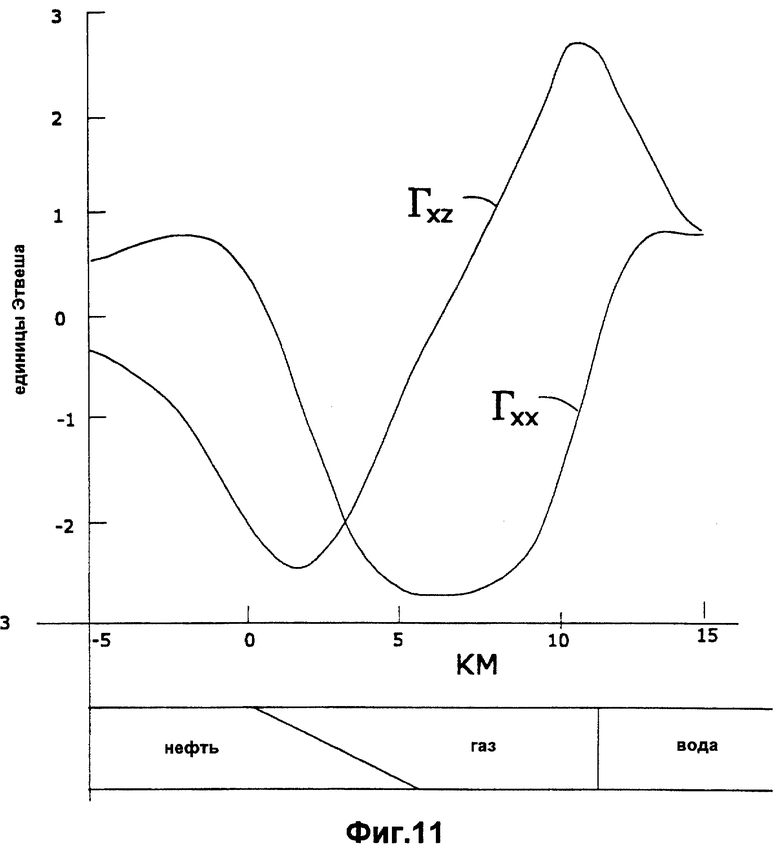
фиг. 11 - графическое представление значений градиента на границе раздела.
Предпочтительный вариант осуществления изобретения
На фиг. 1 показано идеализированное и примерное геологическое образование, имеющее нефтесодержащие пласты. Как показано, нефтепроницаемый пласт 10 ограничен сверху относительно непроницаемым вышележащим пластом 12 (известным как "закупоривающий") и снизу относительно проницаемым пластом 14. Нефтепроницаемый пласт 10 обычно представляет собой мелкозернистый или крупнозернистый песок, пропитанный сырой нефтью, которая обычно накапливается между частицами. В обычном образовании пласты могут образовывать неглубокий купол или антиклинальную складку, под которой накапливается нефть; нефть часто сопровождается природным газом и водой. В тех коллекторах, которые включают природный газ, нефть и воду, природный газ стремится образовать слой или область над нефтью, а вода стремится образовать слой или область ниже нефти. В зависимости от геостатического давления в нефтесодержащем пласте часть газа может перейти в раствор с нефтью. Вообще межфазные границы обычно неотчетливые, хотя в некоторых случаях границы могут быть геологически отчетливыми.
Как показано слева на фиг.1, пласты смещены в вертикальном направлении вдоль линии 16 сброса, так что смещенный пласт 14 породы создает клин 18, который определяет боковую границу нефтепроницаемого пласта 10. Аналогичным образом боковая стенка соляного купола 20, который часто обнаруживается вместе с нефтяными пластами, определяет другую боковую границу нефтепроницаемого пласта 10. Вообще имеющий боковую границу нефтепроницаемый пласт 10, ограниченный нижележащей и вышележащей породой, определяется как коллектор и может возникать на глубинах от несколько десятков до нескольких тысяч футов (от несколько метров до несколько тысяч метров) ниже поверхности земли. Изображение на фиг. 1 иллюстрирует коллектор на глубине несколько сотен футов (несколько сотен метров) и является только примером огромного разнообразия геологических конфигураций, в которых обнаружены нефтяные коллекторы.
На фиг.1 представлены четыре башенные вышки, каждая с буровой скважиной, которая проходит через несколько пластов в нефтепроницаемый пласт 10. Когда находящийся под естественным повышенным давлением нефтяной коллектор первоначально вскрывается с помощью скважины, нефть вытесняется через скважину к поверхности. Однако со временем давление в коллекторе уменьшается до такой точки, когда массоперенос к поверхности прекращается или падает до неприемлемо низкого дебита. В этой точке можно вызвать поток нефти, используя насосы на поверхности, чтобы выкачивать нефть, или путем восстановления пластового давления путем нагнетания воды, пара или газа (т.е. двуокиси углерода или азота) в коллектор через нагнетательные скважины. В примере, показанном на фиг.1, две скважины слева являются нагнетательными скважинами, нагнетающими текучую среду, восстанавливающую пластовое давление, в нефтепроницаемый пласт 10, а две скважины справа являются добывающими скважинами, через которые выводится сырая нефть. Полностью черный участок нефтепроницаемого пласта справа представляет имеющуюся сырую нефть, а часть пласта с точечным пунктиром слева представляет ту часть пласта 10, где нефть смещается и замещается нагнетаемой вытесняющей текучей средой.
На фиг.1 переход от области с точечным пунктиром к черной области представляет межфазную границу или "фронт" между вытесняющей текучей средой, находящейся под давлением, наступающей слева, и сырой нефтью, которая тем самым смещается направо в направлении добывающих скважин. Фиг.1А - это идеализированное представление перехода между вытесняющей текучей средой и смещаемой нефтью и оно иллюстрирует физическое явление, которое не полностью понятно и которое может включать не показанные параметры или особенности. Предполагая, что нефтепроницаемый пласт полностью насыщен нефтью, и в случае, когда вытесняющей текучей средой является пар, температура пара, который может быть вначале перегретым, понижается по мере его продвижения от точки нагнетания, и пар является источником скрытого тепла. В некоторой точке качество пара ухудшается (т.е. увеличивается содержание воды), а теплота парообразования передается окружающей нефти. В этой точке пар и/или нагретая конденсированная вода может подвергаться принудительному перемешиванию с нефтью и может возникнуть фракционная перегонка, индуцированная паром, во время которой некоторые легкие углеводороды в перемещаемой нефти испаряются, чтобы смешаться с паром. В некоторой точке в этом процессе качество пара падает до нуля или до близкого к нулю (т.е. пар конденсируется в горячую воду). На фиг.1А постепенное увеличение плотности точечного пунктира слева направо представляет перемещение нефти из пор. Вообще примерно 90% нефти перемещается из любого произвольно определенного элемента объема, а 10% нефти остается в качестве остаточной нефти; оставшийся объем обычно замещается 30% пара и 60% воды. На фиг.1А пар показан как перерезающий нефть, поскольку пар имеет тенденцию подниматься в пределы нефтепроницаемого пласта. Граница часто неотчетливая и ее морфология может изменяться в результате того, что происходит смешивание с водой в более нижних частях нефтепроницаемого пласта и с природным газом в более верхней части нефтепроницаемого пласта.
Несмотря на то, что фиг.1 иллюстрирует добычу сырой нефти вторичными методами, такая же конфигурация существует для добычи вторичными методами природного газа, остающегося в порах газопроницаемого пласта. В случае, когда коллектор, показанный на фиг.1, является газовой ловушкой, нагнетаемая текучая среда (обычно вода) будет приводить к перемещению захваченного природного газа в направлении добывающих скважин и к этим скважинам.
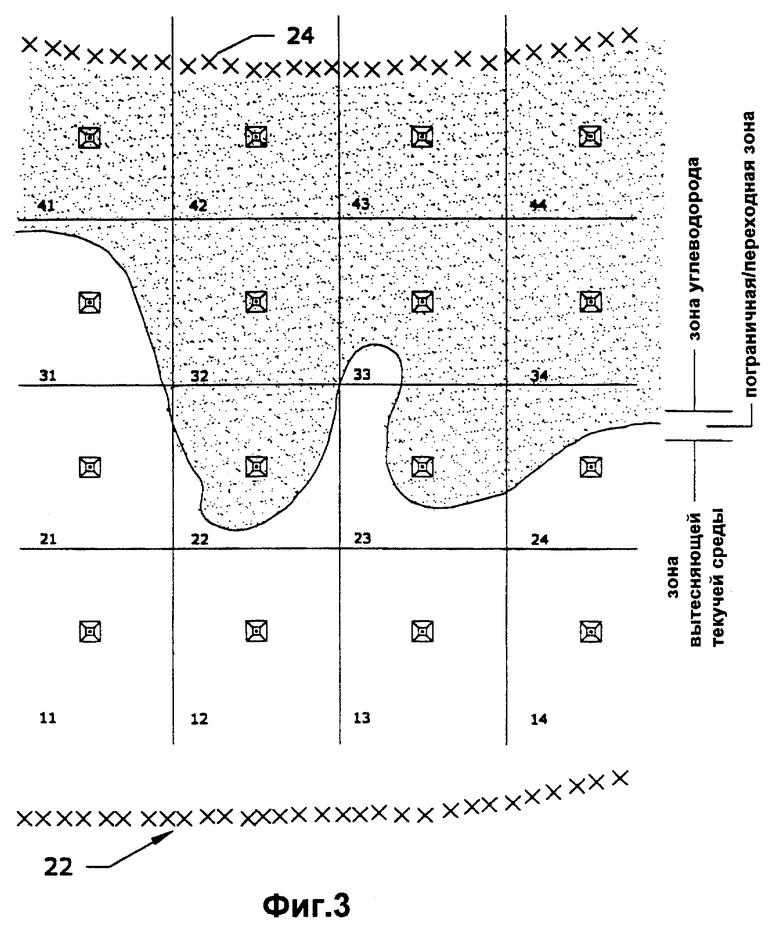
Фиг.2 - вид в плане месторождения, представленного на фиг.1, показывающий прямоугольную сетку размещения шестнадцати скважин, расположенных по центру установленных участков месторождения, идентифицируемых с помощью номеров рядов и столбцов. Обозначение 22 в нижней части фиг.2 представляет местоположение находящейся под поверхностью линии 16 сброса, показанной на фиг. 1, а криволинейное обозначение 24 в верхней части фиг.2 представляет контур периметра соляного купола 20, показанного на фиг.1. На фиг.2 скважины на участках 11, 12, 13, 14 месторождения являются нагнетательными скважинами, нагнетающими вытесняющую текучую среду в нефтепроницаемый пласт 10, а оставшиеся скважины - обычные добывающие нефтяные скважины. Зона точечного пунктира, проходящая частично через участки 21, 11 месторождения и полностью через участки 12, 13, 14 месторождения слева направо на фиг.2, представляет положение находящейся под поверхностью границы между нефтью и вытесняющей текучей средой, находящейся под давлением. Как можно понять, граница или "фронт" является неясным и неоднородным, отражая варьирование проницаемости нефтепроницаемого пласта 10. Вообще граница будет перемещаться со временем через месторождение от нагнетательных скважин к добывающим скважинам.
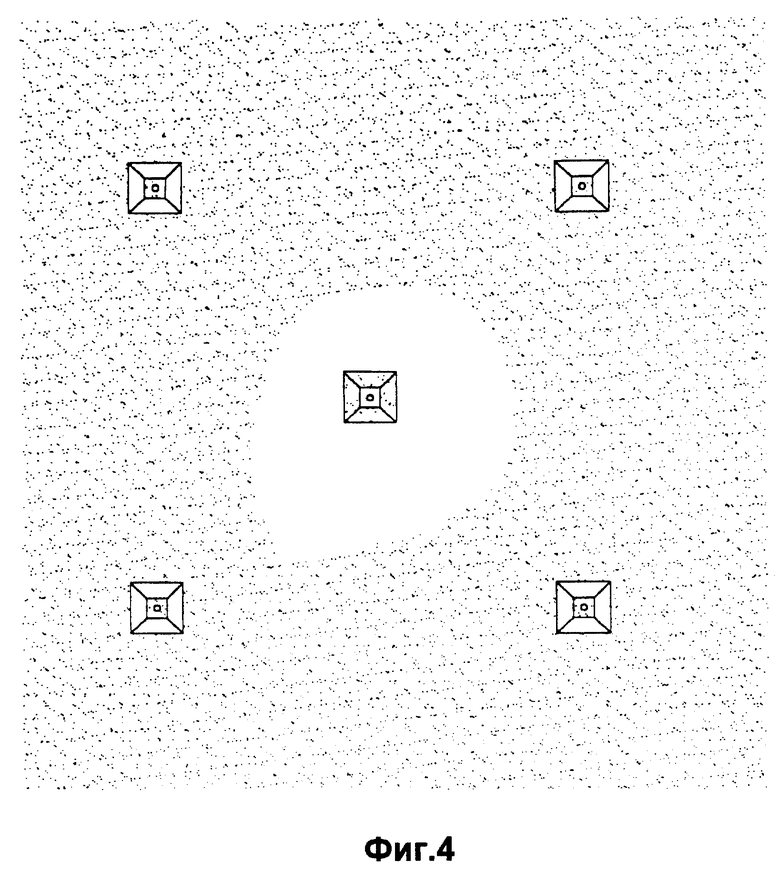
Конфигурация, показанная на фиг.2, известна как конфигурация прямолинейного вытеснения, поскольку образующие линию нагнетательные скважины на участках 11, 12, 13, 14 месторождения закачивают вытесняющую текучую среду в нефтепроницаемый пласт. В альтернативных конфигурациях нагнетательные скважины размещены между добывающими скважинами, как показано, например, в пятиточечной конфигурации на фиг.4. При пятиточечной конфигурации нагнетательная скважина размещается в центре группы из четырех добывающих скважин. Через расположенную по центру нагнетательную скважину нагнетается вытесняющая текучая среда для создания границы, находящейся под поверхностью, которая проходит вокруг нагнетательной скважины, чтобы продвигать, перемещать или вытеснять нефть в направлении добывающих скважин и к скважинам. Вариации пятиточечной конфигурации включают семиточечную и девятиточечную конфигурации (не показаны), в которых расположенная по центру нагнетательная скважина окружена семью или девятью добывающими скважинами соответственно.
Фиг. 3 представляет месторождение, представленное на фиг.2, смещенное со временем, чтобы показать перемещение границы между вытесняющей текучей средой и перемещаемой нефтью за какой-то временной интервал. Вообще разность по времени между фиг.2 и 3 может измеряться неделями, месяцами или годами в зависимости от размера рассматриваемого коллектора, а также дебита скважин и расхода текучей среды при нагнетании в скважину. Как показано, граница сдвинулась дальше от нагнетательных скважин, причем различные участки фронта передвигались с различными скоростями так, что, по существу, изменилась морфология границы. А более конкретно, граница слева прошла мимо скважин на участках 21, 31 месторождения, а граница справа прошла только мимо скважины на участке 24 месторождения. Кроме того, часть границы между скважинами на участках 22, 23 месторождения продвинулась на участок 33 месторождения и в направлении скважины на участке 33. Конкретная морфология границы, показанная на участке 33 месторождения между скважинами на участках 22, 23 месторождения, убедительно наводит на мысль о зоне поглощения, т.е. об объеме, занимаемом материалом с относительно высокой проницаемостью, что позволяет вытесняющей текучей среде, находящейся под давлением, образовывать через него канал, который может пробиваться к добывающей скважине и существенно уменьшить эффективность добычи.
Информация о положении, протяженности, морфологии и скорости границы со временем представляла бы ценные сведения при управлении нагнетательными скважинами для оптимизации области, продвинутой за счет перемещения границы и, следовательно, оптимизации добычи. Информация, касающаяся изменений нефтяного пласта со временем, является полезной для предсказания тенденций к его истощению, указывая на местоположение и протяженность оставшихся ресурсов, и обеспечивает информацию о размещении новых нагнетательных и добывающих скважин для оптимального увеличения дебета.
Применительно к условиям, показанным на фиг.1А, плотность произвольного элемента объема является функцией от плотности жидких и газовых текучих сред, насыщенности жидкими и газовыми текучими средами, плотности основной породы и пористости основной породы. Изменение плотности Δρ для элемента объема коллектора ΔV может быть представлено как Δρ= P(ρfΔf+ρgΔg), где ρf - плотность жидкости, Δf - изменение в насыщенности жидкостью, ρg - плотность газа, а Δg - изменение газонасыщенности.
Вообще порода имеет обычную плотность между примерно 1,9 и 3,0 г/см3, а нефть имеет плотность между 0,7 г/см3 в случае легкой нефти и 0,9 г/см3 в случае более тяжелой нефти; таким образом, нефтепроницаемый материал может рассматриваться как материал, имеющий составную плотность. Когда вытесняющая текучая среда смещает и замещает захваченную нефть, составная плотность изменяется вследствие перемещения нефти и занятия пор остаточной нефтью и вытесняющим материалом. Для произвольного элемента объема в точке А на фиг.1А плотность является функцией основной породы, остаточной нефти (примерно 10%), а также вновь введенных пара (примерно 30%) и воды (примерно 60%). Следовательно, разность в плотности для элемента объема в точке А и точке В, показанных на фиг.1А, представляет контраст по потности, который будет влиять на локальный градиент ускорения силы тяжести таким образом, что на поверхности могут быть установлены изменения этого градиента. Вообще контраст по плотности будет меньше, чем несколько десятых г/см3; предполагается, что горизонтальный размер зоны переноса, на которой возникает контраст по плотности, составляет диапазон между десятками и сотнями футов (метров).
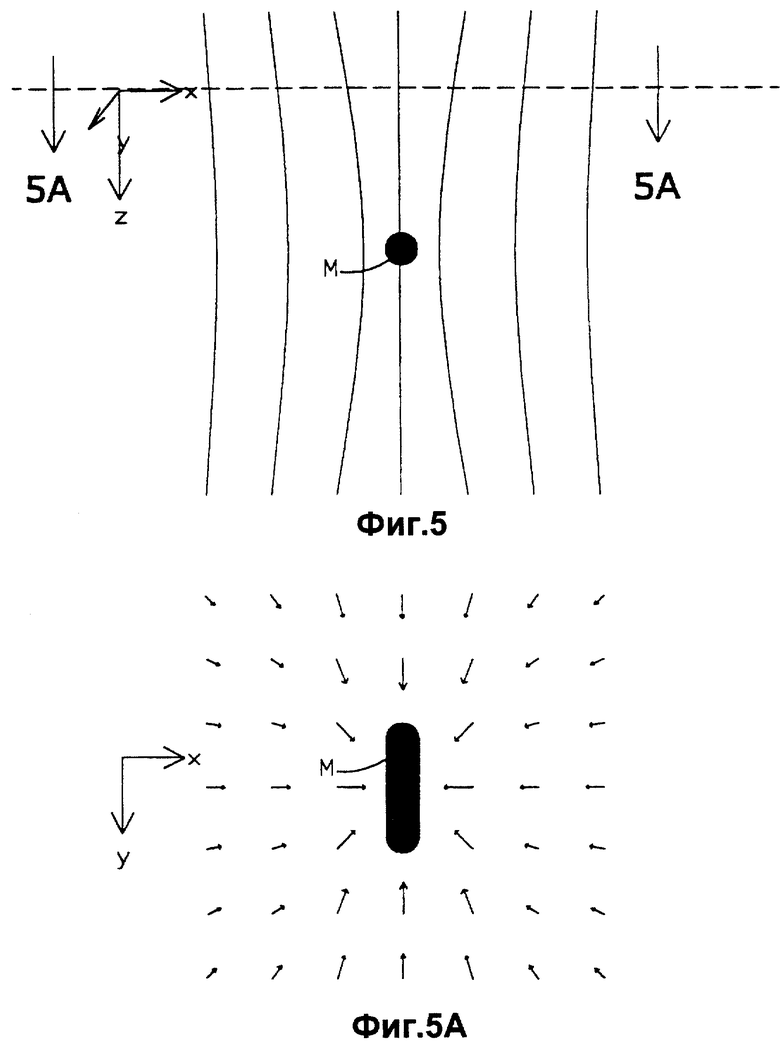
Гравитационное поле Земли изменяется между нижней величиной примерно 978 Гал (9,78 м/с2) на экваторе до примерно 983 Гал (9,83 м/с2) на полюсах с градиентами, характеризуемыми в единицах "Этвеш", где один "Этвеш" равен 10-9 с-2. Для идеализированной однородной сферы эквипотенциальные поверхности вне сферы также являются сферическими. Однако неоднородности плотности в сфере приводят к тому, что эквипотенциальная поверхность становится не сферической; для такой поверхности кривизна в любой точке различна в различных направлениях. Два направления, по которым кривизна является максимальной и минимальной, называются основными направлениями; разность в кривизне по этим двум направлениям называется дифференциальной кривизной, ниже это поясняется более подробно. В случае Земли локальные изменения ускорения силы тяжести вызываются отклонениями поверхности Земли от геометрической сферы, геологией поверхности, приливами воды, атмосферными приливами, а также изменением относительного положения Земли, Луны и Солнца. Для любого относительно небольшого элемента объема в свободном пространстве идеализированное гравитационное поле может рассматриваться как совокупность однонаправленных силовых линий, ориентированных по локальной вертикали и имеющих нулевую амплитуду в направлениях х, у. В случае, если некоторая масса помещается в пределах этого элемента объема, гравитационное поле будет возмущаться. Например, и как показано на фиг.5, плотная масса М цилиндрической формы, имеющая полусферические концы и конечную длину по главной оси, расположенная в центре произвольного элемента объема, будет возмущать локальное гравитационное поле в пределах этого элемента объема, приводя к тому, что силовые линии, ближайшие к массе М, будут искривляться в направлении массы М, а силовые линии, более отдаленные от ближайших силовых линий, будут искривляться в направлении массы М в меньшей степени.
Для любой точки наблюдения в пределах произвольного элемента объема гравитационное поле в этой точке наблюдения может быть разложено на составляющие х, у, z, из которых вектор z будет иметь наибольшую величину, а векторы х, у будут иметь соответствующие величины, которые являются функцией от местонахождения точки наблюдения относительно возмущающей массы М. Для точек наблюдения в плоскости выше или ниже массы М, показанной на фиг.5, информация о векторах в этой точке наблюдения будет давать информацию об отклонении или угле наклона как показателе возмущения поля. В условиях примера, показанного на фиг.5А, достаточное число наблюдений в плоскости над массой М (или плоскости ниже массы М) будет создавать совокупность данных, из которой можно получить одну или несколько изопотенциальных поверхностей, которые графически определяют возмущение гравитационного поля, вызванное введением массы М.
Вообще гравитационное поле вдоль оси z может быть измерено с помощью одноосевых гравиметров, в обычных типах которых используются лазеры и высокоточные часы для измерения времени падения массы между двумя вертикально разнесенными точками в вакуумированном пространстве. Градиометры в отличие от гравиметров измеряют градиенты кривизны (или дифференциальную кривизну, или эллиптичность эквипотенциальных поверхностей гравитационного поля), горизонтальные градиенты (или скорость изменения увеличения ускорения силы тяжести в горизонтальном направлении) или вертикальные градиенты (или скорость увеличения ускорения силы тяжести в вертикальном направлении). Для измерения градиента ускорения силы тяжести разработаны различные способы и приборы. Эти способы и измерительные приборы включают измерение отклонения в горизонтальной плоскости массы, подвешенной на струне (метод Бугера), и крутильного поворота, происходящего на горизонтально подвешенном коромысле с неравными массами на его концах (коромысла Кавендиша и Этвеша). В современных градиометрах ускорения силы тяжести используются акселерометры с восстанавливающей силой для измерения горизонтальных составляющих х, у градиента ускорения силы тяжести. Вообще и в наиболее простой форме, в акселераторе используется масса, подвешенная на конце податливаемого балансира. Выявляется любое отклонение положения массы от нулевого положения, вызванное ускорением, которое испытывает масса, и масса возвращается в свое нулевое положение с помощью магнитного поля, прикладываемого с помощью возвращающей магнитной катушки. Ток, протекающий через возвращающую катушку, пропорционален ускорению, которое испытывает масса.
Некоторые современные градиометры ускорения силы тяжести используют несколько пар акселерометров, которые перемещаются с постоянной скоростью по орбитальному пути вокруг оси. Информация от каждого акселерометра при любом угловом положении на орбите дает информацию о горизонтальном ускорении, которое испытывает акселерометр. В условиях, показанных на фиг.5А, акселерометр, перемещающийся с постоянной угловой скоростью по орбитальному пути в плоскости наблюдения выше массы М, будет испытывать положительное и отрицательное ускорения в направлениях х, у и формировать выходной сигнал синусоидальной формы, который модулирован информацией об аномалии ускорения силы тяжести в этой плоскости наблюдения. Когда плоскость наблюдения нормальна локальной вертикали, тогда выходной сигнал акселерометра не содержит составляющую, представляющую ось z. И наоборот, как поясняется ниже, в применении к предпочтительному тестовому протоколу, если акселерометр находится в плоскости наблюдения, которая наклонена относительно силовых линий, тогда выходной сигнал акселерометра также будет модулирован и информацией, связанной с осью z.
Градиометр ускорения силы тяжести, подходящий для настоящего изобретения, включает измеритель градиента ускорения силы тяжести (ИГУ), продаваемый Lockheed Martin corporation (Буффало, штат Нью-Йорк, США); Lockheed Martin ИГУ, базовая конструкция которого показана на фиг.6, является предпочтительным применительно к настоящему изобретению. Базовая конструкция и работа Lockheed Martin ИГУ описаны в патенте США 5,357,802, выданном 25 октября 1994 г. Хофмейеру и Эффлеку (Hofmeyer и Affleck) и имеющем название "Градиометр с вращающимися акселерометрами" ("Rotating Accelerometer Gradiometer"), раскрытие которого включено в настоящее описание путем ссылки.
Как показано на фиг.6 и 7, ИГУ включает восемь акселерометров 100, установленных на одинаковом радиусе и на равноотстоящем друг от друга расстоянии по периметру роторного узла 102, который вращается с постоянной и регулируемой угловой скоростью относительно оси Аx вращения. Роторный узел 102 включает ротор 104, выполненный на опорном валу 106 с возможностью вращения вместе с ним. Роторный узел 102 закреплен с возможностью вращения в подшипниках 108 и, в свою очередь, в гибко установленном узле 110, предохраняющем от вибрации. Обрабатывающие электронные схемы 112 размещены на роторе 104 вблизи каждого акселерометра 100 для обработки их выходных сигналов, как пояснено ниже при рассмотрении фиг.7. Внутренний кожух 114 включает роторный узел 102 и выполнен с возможностью вращения вместе с роторным узлом 102. Наружный кожух 116 содержит в себе внутренние компоненты и включает один или несколько нагревателей 118, выполненных для обеспечения работы измерительного прибора при некоторой регулируемой температуре выше окружающей среды (т.е., примерно 115oF (46,1oC)) и включает также экран 120 для защиты от магнитного поля. Узел 122 токособирательных контактных колец на верхнем конце опорного вала 106 обеспечивает сопряжение электрическое/сигнальное с роторным узлом 102 и работающими на нем устройствами. Датчик 124 положения вала на нижнем конце опорного вала 106 взаимодействует с тензодатчиком 126 для обеспечения информации о вращательном положении. Выходной сигнал тензодатчика 126 подается на компьютер и регулятор скорости, который, в свою очередь, управляет двигателем 128 на верхнем конце устройства, чтобы обеспечивать регулируемую скорость вращения.
Каждый акселерометр 100 формирует синусоидольно изменяющийся аналоговый выходной сигнал, который является функцией ускорения, которое испытывает каждый акселерометр, когда этот акселерометр совершает орбитальное движение относительно оси вращения. Для градиометра, имеющего ось вращения, ориентированную вдоль силовых линий в идеально однородном и не возмущенном гравитационном поле, каждый акселерометр испытывает одни и те же силы под действием ускорения, когда они продвигаются вдоль орбитального пути. Однако, если локальное гравитационное поле возмущено из-за наличия одной или более масс и/или ось вращения наклонена относительно локальных вертикальных силовых линий, тогда каждый акселерометр будет испытывать различные ускорения, проходя по орбите. Количественная величина выходного сигнала каждого акселерометра в совокупности с его вращательным положением дает информацию относительно локальных градиентов ускорения силы тяжести.
В любой точке наблюдения градиент ускорения силы тяжести - это производная второго порядка от скалярной величины Г гравитационного потенциала и представляется симметричным тензором Гij из девяти компонент второго порядка следующим образом: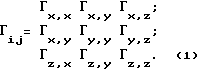
Компоненты Гx,z и Гy,z приблизительно равны изменению силы тяжести вдоль направлений х и у, соответственно, и известны как составляющие горизонтального градиента, a Гz,z известен как вертикальный градиент силы тяжести. Дифференциальная кривизна связана с Гx,x, Гy,y и Гx,y следующим образом:
[(Гx,x-Гy,y)2 + 4(Гx,y)2]1/2/F, (2)
где F - сила тяжести.
Помимо дифференциальной кривизны формула (2) вектор кривизны, модуль которого равен дифференциальной кривизне, также определяется величиной λ следующим образом:
λ = -1/2tan-1[2Гx,y/(Гy,y-Гx,x)], (3)
где λ - угол вектора дифференциальной кривизны относительно оси х.
Как известно, диагональные элементы являются скалярными инвариантами и удовлетворяют соотношению Лапласа
0 = Гx,x + Гy,y + Гz,z, (4)
из которого следует
Гz,z = -(Гx,x + Гy,y). (5)
Кроме того, три пары из девяти элементов являются симметрично равными, т. е. , Гx,z = Гz,x, Гy,z = Гz,y и, наконец, Гx,y = Гy,x так что тензор характеризуется пятью независимыми компонентами.
Градиенты Гy,y - Гx,x и 2 Гx,y в формуле (1) - это две компоненты градиента кривизны, a Гx,z и Гy,z - две компоненты горизонтального градиента; Гz,z - компонента вертикального градиента.
Выходной сигнал акселерометров обрабатывается в соответствии с блок-схемой, показанной на фиг.7; обработка может осуществляться с помощью отдельных полупроводниковых функциональных приборов, с помощью программных средств или аппаратно реализованного программного обеспечения, управляемого микропроцессорами или компьютерами, с помощью специализированной интегральной схемы (СИС) или путем их комбинирования.
Как показано, предварительно обработанные выходные сигналы восьми акселерометров 100 измерителя градиента ускорения силы тяжести, ИГУ, представленного на фиг.6, разделяются на две группы А и В по четыре сигнала, причем каждая группа поделена на две подгруппы, т.е., (А1, А2), (A3, А4), (B1, B2) и (В3, В4).
Выходные сигналы A1, A2 акселерометров подаются на входы суммирующего устройства SUM(A1+A2), а выходные сигналы A3, А4 аналогичным образом подаются на суммирующее устройство SUM(A3+A4). Суммированные выходные сигналы устройств SUM(A1+A2) и SUM(A3+A4) подаются на вычитатель SUB-A. Аналогичным образом выходные сигналы B1, B2 акселераторов подаются на входы суммирующего устройства SUM(B1+B2), а выходные сигналы В3, В4 аналогичным образом подаются на вход суммирующего устройства SUM(B3+B4). Суммированные выходные сигналы устройств SUM(B1+B2) и SUM(B3+B4) подаются на вычитатель SUM-B. Суммирование сигналов диаметрально противоположных акселерометров 100 фактически уничтожает составляющую ускорения, обусловленную любым смещением роторного узла в плоскости XY. Операция по определению разности в схемах SUB-A и SUB-B вычитания исключает влияние любого углового ускорения роторного узла, которое может возникать при реакции на сигналы коррекции угловой скорости, посылаемые для двигателя регулятором скорости.
Группа из четырех демодуляторов демодулирует выходные сигналы устройств SUB-A и SUB-B вычитания при отклике на синфазный и квадратурный опорные сигналы с частотой в два раза большей частоты вращения роторного узла, которые формируются источником опорных сигналов. Источник опорных сигналов может включать генератор со схемой фазовой синхронизации, который автоматически синхронизуется по фазе с вращением роторного узла 102 при отклике на выходной сигнал тензодатчика 126. Синфазный опорный сигнал sin 2ΩT подается на демодуляторы DEMOD-SA и DEMOD-SB, соединенные, соответственно, с выходами схем SUB-A и SUB-B вычитания. Аналогичным образом квадратурный опорный сигнал cos 2ΩT подается на демодуляторы DEMOD-CA и DEMOD-CB, также подключенные, соответственно, к выходам схем SUB-A и SUB-B вычитания. Выходные сигналы четырех демодуляторов DEMOD-SA, DEMOD-SB, DEMOD-CA и DEMOD-CB имеют форму взятых в квадрат синусного и косинусного сигналов. А более конкретно, на выходе DEMOD-SA формирует величину 2R(Гx,x-Гy,y)sin22Ωt и составляющие, связанные с 4Ωt, демодулятор DEMOD-CA формирует величину 4RГxycos22Ωt и составляющие с 4Ωt, демодулятор DEMOD-SB на выходе формирует величину минус 4RГxysin22Ωt и составляющие с 4Ωt и, наконец, демодулятор DEMOD-CB формирует на выходе величину 2R(Гxx-Гyy)cos22Ωt и составляющие с 4Ωt. Множитель 2R - это расстояние между противоположно расположенными акселерометрами, т.е. расстояние между парой акселерометров А1 и А2.
Схема SUM-A суммирования получает выходной сигнал с демодуляторов DEMOD-SA и DEMOD-CB и подает суммарный выходной сигнал на низкочастотный фильтр LP-A. Аналогичным образом схема SUM-B суммирования принимает выходной сигнал с демодуляторов DEMOD-SB и DEMOD-CA и подает суммарный выходной сигнал на низкочастотный фильтр LP-B.
Выходные сигналы демодуляторов DEMOD-SA, DEMOD-SB, DEMOD-CA и DEMOD-CB включают высокочастотные составляющие в смысле частот, равных четырехкратной вращательной частоте роторного узла. Данные по градиенту, не считая скалярного коэффициента, определяются возведенными в квадрат синусоидальными и возведенными в квадрат косинусоидальными составляющими демодулированных сигналов. Эти составляющие суммируются вместе в схемах SUM-A и SUM-B суммирования для получения значения по постоянному току данных по градиенту, наряду с высокочастотными составляющими. Функция низкочастотных фильтров LP-A и LP-B, соответственно, - фильтровать выходные сигналы схем SUN-A и SUM-B суммирования и ослаблять высокочастотные составляющие так, чтобы обеспечить получение требующихся составляющих сигналов по постоянному току, представляющих данные по градиенту. Данные по градиенту выводятся из низкочастотного фильтра LP-A в виде выражения, которое включает член 2R(Гxx-Гyy), а из низкочастотного фильтра LP-B в виде выражения 4R(Гxy).
Деление выходных сигналов 2R(Гxx-Гyy) и 4R(Гxy) на 2R дает два результата, (Гxx-Гyy) и 2R(Гxy), которые определяют вектор кривизны; модуль вектора кривизны известен как "дифференциальная кривизна" или "тенденция к горизонтальному наведению" и равен квадратному корню из суммы (Гxx-Гyy)2 и (2Гxy)2.
Направление λ вектора кривизны относительно оси Х представляется следующим образом:
λ = -1/2tan-1(2гxy/(Гyy-Гxx).
Приведенное выше описание в связи с фиг.7 представляет функцию ИГУ, когда чувствительные оси акселерометров находятся в плоскости, нормальной к вертикали. При этой ориентации измерительный прибор оптимизирован для выявления х, у составляющих градиента ускорения силы тяжести. Однако в выходной сигнал вследствие конструкции самого измерительного прибора может быть введен ряд ошибок. При конструировании ИГУ делается попытка, чтобы масса была однородно и симметрично распределена вокруг оси Аx вращения. Поскольку в ИГУ используются отдельные разрозненные приборы, то относительно оси вращения существует некоторая массовая асимметрия. Кроме того, ИГУ является несимметричным по массе выше и ниже плоскости ротора 104. Если массовая асимметрия небольшая, то асимметрия физически приближена к акселерометрам и предполагается, что она
оказывает влияние в виде составляющей ошибки измерения.
В соответствии с настоящим изобретением и, как поясняется ниже в связи с тестовым протоколом, показанным на фиг.10, ИГУ работает по крайней мере в двух ортогонально разнесенных в пространстве направлениях (т.е. под углом 90 градусов). Поскольку ошибки, связанные с систематической ошибкой конкретного измерительного прибора и ошибки из-за градиента, обусловленного конкретным измерительным прибором, являются "постоянными" для самого измерительного прибора и связанных с ним структур, то вращение ИГУ вокруг его оси вращения для двух ортогональных направлений не будет изменять значения систематической ошибки конкретного измерительного прибора и ошибок в измерениях градиента, связанных с конкретным измерительным прибором, хотя одновременно при этом знак измеренных постоянных градиентов Земли меняется на противоположный. Путем усреднения разностей между сериями данных, полученных при двух ортогональных направлениях, могут быть получены абсолютные значения градиентов кривизны Земли, поскольку систематическая ошибка конкретного измерительного прибора и градиенты, обусловленные конкретным измерительным прибором, будут взаимно скомпенсированы.
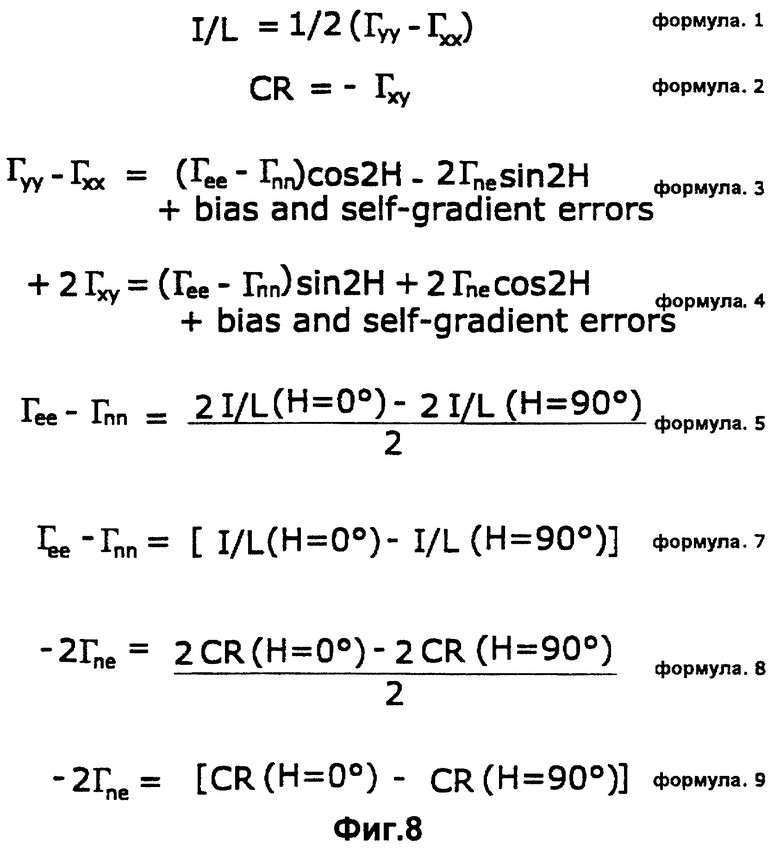
Как поясняется в математическом представлении, показанном на фиг.8, первичный выходной сигнал ИГУ может быть охарактеризован как "линейная (по линии)" I/L компонента, а вторичный выходной сигнал может быть охарактеризован как "перекрестная" CR компонента. В применении к функциональной блок-схеме, показанной на фиг.7, линейная и перекрестная компоненты могут быть определены, как показано в формуле (1) и формуле (2) на фиг.8. Ось X ИГУ может быть ориентирована, например, на север, и, используя последовательность углов эйлера, градиенты кривизны, измеренные с помощью измерительного прибора в системе координат х, у, могут быть выражены в виде функции постоянных градиентов кривизны Земли в системе координат север и восток, как представлено в формуле (3) и формуле (4) на фиг.8. Линейные выходные сигналы ИГУ при направлении с азимутом на север (0 градусов) представлены на фиг.8, как I/L(H= 0o), а для ортогонального измерения, как I/L(H=90o). Аналогичным образом перекрестные выходные сигналы ИГУ при направлении на север и восток представляются, как CR(H= 0o), a для ортогонального измерения, как CR(H=90o), так что значения градиента кривизны без систематической ошибки могут быть получены из формул (5) - (9), представленных на фиг.8.
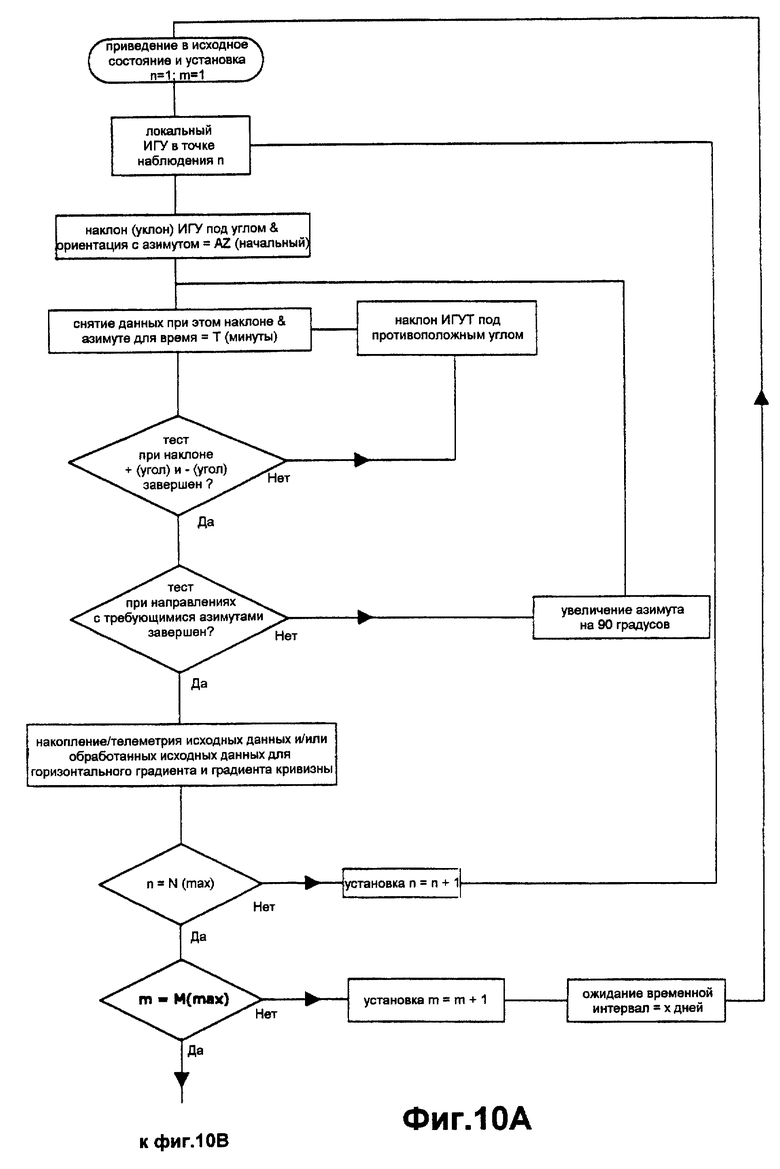
Как поясняется ниже в связи с фиг.10А и 10В, ИГУ работает при выполнении тестового протокола с осью вращения, "наклоненной" под небольшим положительным углом и небольшим отрицательным углом относительно горизонтальной плоскости для создания горизонтальной составляющей ускорения силы тяжести, чтобы возбуждать в ИГУ контуры управления компенсацией с обратной связью и обеспечить возможность калибровки скалярных коэффициентов акселерометров. Однако при наклоненной оси вращения в измерениях кривизны, выполненных с помощью ИГУ, возникают горизонтальные градиенты ускорения силы тяжести Земли. Выполнение измерений с помощью ИГУ, наклоненного под небольшим углом выше горизонтали и под небольшим углом ниже горизонтали, в сочетании с измерениями, выполненными при направлениях с двумя азимутами, которые отличаются на 90 градусов, приведет к получению измерений, которые дублируют требующиеся градиенты кривизны и из которых исключены нежелательные горизонтальные градиенты.
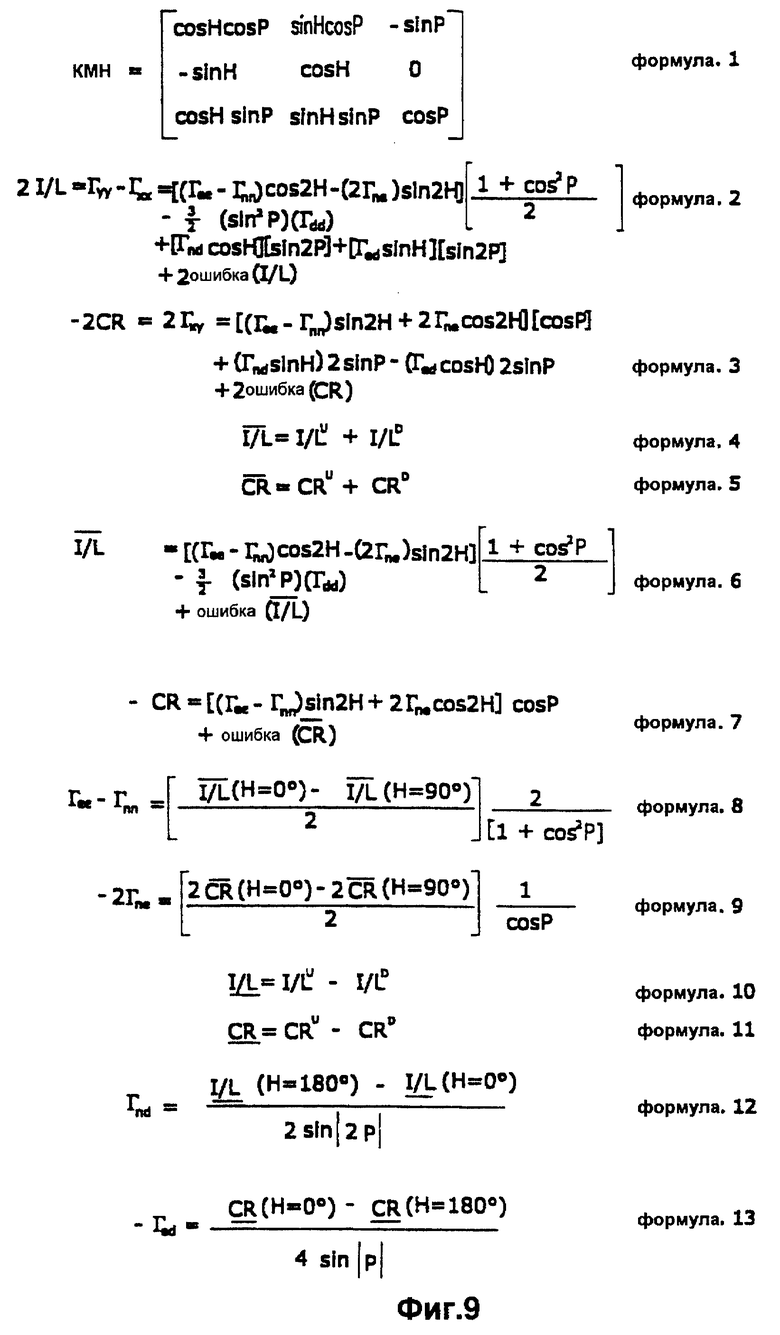
ИГУ включает ортогональные оси вращения и наклона, из которых ось вращения сохраняется горизонтальной в локальной х, у плоскости, когда измерительный прибор поворачивают вокруг его оси вращения, чтобы наклонить измерительный прибор вверх или вниз относительно локальной горизонтальной плоскости. Компонента I/L указывает линию, которая находится в плоскости х, у ИГУ, которая может быть ориентирована на направление с каким-то азимутом, когда плоскость х, у измерительного прибора наклонена под некоторым небольшим углом относительно локальной х, у плоскости. Вторичный выходной сигнал градиометра - "перекрестная" CR компонента, как пояснялось выше в связи с формулами (1) и (2) на фиг.8. В условиях математического представления, показанного на фиг.9, I/L и CR градиенты, измеренные ИГУ в его системе координат х, у, могут быть выражены в виде функции компонент тензора градиента Земли в геодезической системе отсчета: север, восток и вниз. Косинусная матрица направлений (КМН), которая преобразует геодезическую систему координат, север, восток и вниз в систему координат измерительного прибора, х, у, z, при направлении с углом Н и угле наклона Р, представлена в формуле (1) на фиг.9. Выходные сигналы I/L и CR ИГУ связаны с геодезическими градиентами, как представлено в формулах (2) и (3) на фиг.9, где члены "ошибка (I/L)" и "ошибка (CR)" включают собственную систематическую ошибку измерительного прибора и все ошибки в измерении градиента, обусловленные конкретным измерительным прибором. Как показано в формулах (4) и (5), указываются суммы результатов измерений при наклоне вверх и вниз, где надстрочный индекс "U" указывает наклон "вверх", а надстрочный индекс "D" указывает наклон "вниз", причем формулы (6) и (7) показывают взаимосвязь с геодезическими градиентами. Выполнив измерения при Н=0 градусов и Н=90 градусов и вычислив сумму линейного и перекрестного значений, в результате получаются формулы (8) и (9) для оценки градиентов кривизны, Гee-Гnn и 2Гne без связи их с горизонтальными градиентами Гnd и Гed и вертикальным градиентом Гdd, причем эти величины не содержат систематической ошибки и ошибок, обусловленных собственными градиентами конкретного измерительного прибора. Формулы (10) и (11) представляют разность между измерениями I/L и CR при наклонах "вверх" и "вниз", а формулы (12) и (13) дают оценку горизонтальных градиентов исходя из данных измерений, выполненных, кроме того, при 180 градусах.
В соответствии с тестовым протоколом настоящего изобретения и, как показано на фиг.10А и 10В, ряд измерительных пунктов n устанавливается на нефтяном месторождении. Каждый измерительный пункт может быть в виде участка очищенной земли или, более предпочтительно, в виде асфальтовой или цементной подушки. Важно, чтобы местоположение измерительного пункта было постоянным в течение первого и последующих тестов. Пункты измерений предпочтительно могут иметь вид прямоугольной периодической структуры, образованной из мест наблюдения, полярной структуры из мест наблюдения или смешанной, включая пункты наблюдения, которые не относятся к заранее определенному рисунку и могут рассматриваться как случайно помещенные в пределах обследуемого месторождения. Например, в применении к фиг.2 и 3 места, в которых проводятся измерения, могут соответствовать местоположению показанных номеров, рядов и столбцов участков месторождения.
ИГУ предпочтительно устанавливается на небольшой колесной тележке, которая может двигаться от пункта к пункту, как предусмотрено тестом. В зависимости от расстояния между пунктами наблюдения ИГУ может транспортироваться, например, с помощью колесного или другого транспортного средства. Если требуется, то ИГУ может устанавливаться на колесном транспортном средстве и включаться от пункта к пункту и измерения могут выполняться с транспортного средства. Однако предпочтение имеет подвижная тележка, поскольку использование тележки устраняет из совокупности данных гравитационные аномалии, вводимые колесным транспортным средством. В каждом пункте измерения тележка поднимается на опоры с регулируемой высотой.
Как показано на схеме последовательности операций на фиг.10А, система приводится в исходное положение и параметры m и n устанавливаются, равными 1; при этом n представляет число заранее установленных пунктов измерения, где максимальное число пунктов измерения N(max), a m представляет число серий данных, которые должны быть получены за все время, где максимальное число M(max).
ИГУ размещается в первом пункте измерений и до начала снятия данных все предметы, имеющие достаточно большую массу, чтобы повлиять на измерения (транспортное(ые) средство(а), источники питания, локальное компьютерное управление, персонал и т.д.), перемещаются на достаточно удаленное расстояние от измерительного прибора, чтобы минимизировать любые неблагоприятные влияния на измерительный прибор от этих предметов. Вообще предпочтительно, чтобы каждый пункт измерения не располагался вблизи неподвижных, закрепленных на месте конструкций, изготовленных человеком, чтобы минимизировать появление больших сигналов, не связанных с местоположением границ раздела.
Затем ИГУ устанавливают в исходное положение, а ось вращения наклоняют на некоторый заранее выбранный угол наклона (т.е. плюс примерно 0,9 градуса в случае настоящего изобретения), достаточный для того, чтобы получить отклик по оси z в акселерометрах, а измерительный прибор ориентируют по направлению с азимутом ноль градусов. Как пояснялось выше в связи с фиг.9, "наклон" роторного узла на некоторый угол, достаточный для того, чтобы восемь акселерометров восприняли вектор ускорения силы тяжести, позволяет измерительному прибору получать выходные сигналы каждого акселерометра для установления величины ускорения силы тяжести, определения скалярного коэффициента каждого акселерометра, разностей между скалярными коэффициентами акселерометров и определения величины согласования так, чтобы все акселерометры давали идентичные, легко различимые выходные сигналы. Как показано на схеме последовательности операций на фиг.10А, измерительный прибор, кроме того, впоследствии наклоняют на угол, противоположный первому углу, чтобы можно было исключить перекрестные связи с горизонтальными градиентами. Следовательно, данные измерений, полученные при первом угле наклона, включают систематическую ошибку измерительного прибора и, аналогичным образом, данные измерений, полученные при противоположном угле наклона, подобным же образом включают в себя систематические ошибки измерительного прибора; тогда данные измерений для обоих углов наклона могут быть усреднены для компенсации систематической ошибки.
Затем ИГУ снимает данные в пункте наблюдения в течение некоторого промежутка времени, достаточного для гарантирования того, чтобы источники ошибок были сведены к минимуму; в случае предпочтительного ИГУ подходящим для снятия данных считается временной интервал порядка нескольких минут (т.е. примерно пять минут) при каждом направлении.
Затем измерительный прибор отклоняют на противоположный угол (т.е. минус примерно 0,9 градуса в случае настоящего изобретения) и повторяют этап снятия данных при начальном азимуте. Когда снятие данных завершено при направлении с начальным азимутом для обеих ориентаций, с наклоном вверх и наклоном вниз, измерительный прибор поворачивают на азимут, увеличенный на 90 градусов, и повторяют этап снятия данных при наклоне вверх и наклоне вниз. Снятие данных при наклоне вверх и наклоне вниз нужно проводить при направлениях только с двумя азимутами; однако, если требуется, то для увеличения точности снятия данных этап снятия данных при наклоне вверх и наклоне вниз может повторяться при направлениях с большим числом азимутов. Поворот измерительного прибора на новое направление включает поворот самого измерительного прибора, его тележки и любых связанных с ним конструкций, включая любое окружающее ограждение. Поворот конструкций, связанных с работой самого измерительного прибора, помогает свести к минимуму источники ошибок. Как пояснялось выше в связи с фиг.8, поворот азимута выполняется для обеспечения информации, необходимой для устранения источников ошибок, связанных с массовой несимметрией самого измерительного прибора и его непосредственного окружения. Эта последовательность продолжается до тех пор, пока не будут сняты данные по меньшей мере в направлениях с тремя ортогональными азимутами; однако в случае предпочтительного варианта данные снимаются при 0, 90, 180, 270 градусов и затем опять при 0 градусов. Если требуется дополнительная информация, то этапы снятия данных могут повторяться при различных направлениях.
Как пояснялось более подробно выше, снятие данных при направлениях с различными азимутами и различных углах наклона осуществляется для сведения к минимуму источников ошибок и фактически для увеличения чувствительности измерительного прибора.
Затем n увеличивается на единицу, ИГУ перемещают на ближайший следующий измерительный пункт и последовательность действий на этом пункте повторяется.
Когда на каждом из n измерительных пунктов данные сняты (т.е. n=N(max)), то первая серия данных полностью получена. В соответствии с настоящим изобретением промежуток времени (измеренный в неделях, месяцах или годах) проходит такой, в течение которого нефтяное месторождение подвергается непрерывному или не непрерывному повышению давления с помощью нагнетаемой вытесняющей текучей среды, чтобы вызвать смещение границы раздела между вытесняющей текучей средой и добываемыми углеводородами. После того, как межтестовый период прошел, тестовая последовательность, показанная на фиг.10А, повторяется для получения другой серии данных, называемой второй серией данных. Как можно понять, третий, четвертый и последующие тесты могут проводиться по прошествии подходящих межтестовых временных интервалов, чтобы получать третий, четвертый и последующие серии данных. На практике наличие двух последовательных серий данных (т. е. М(mах)= 2) достаточно для получения приемлемых данных.
Каждая серия данных включает информацию о градиенте ускорения силы тяжести по месторождению, включающую влияние подземной геологии, изменения, обусловленные рельефом местности и созданными человеком, неподвижными закрепленными на месте конструкциями, включая башенные вышки, трубопроводы, насосы, двигатели и т.д., которые обычно находятся на территории нефтяного месторождения. Кроме того, эта серия данных будет включать информацию, касающуюся влияния на градиент ускорения силы тяжести границы раздела между вытесняющей текучей средой и смещаемыми углеводородами. Однако нет способа, не являющегося предположительным, который мог бы точно определить местоположение границы раздела исходя из единственной серии данных. Как и в случае первой серии данных, вторая и последующие серии данных аналогичным образом включают информацию, касающуюся влияния на градиент ускорения силы тяжести геологии, рельефа местности и созданных человеком конструкций, а также границы раздела на новом месте. Следовательно, информация, касающаяся геологии, рельефа местности и созданных человеком конструкций, будет представлять относительно инвариантные (неизменяющиеся) общие данные или сигнальную информацию одинакового вида для каждой серии данных, а информация, касающаяся перемещающейся со временем границы раздела, не будет общей для различных серий данных.
Источники ошибок, которые могут отрицательно повлиять на точность, могут включать геологические перемещения, такие как уплотнение нефтяного коллектора и перемещение уровня подземных вод.
Для обработки первой и второй (и/или последующих серий данных) и в качестве начального шага разрабатывается теоретическая модель взаимосвязи градиента ускорения силы тяжести с пластами ниже интересующего углеводородного коллектора. Для любого углеводородного коллектора, из которого ведется вторичная добыча, есть вероятность, что совокупность геофизических данных, включая модель коллектора, может быть получена из предварительной акустической съемки, каротажа скважин, керна, анализа продукта пробных скважин и знаний о наличии или отсутствии (и изменениях) вытесняющей текучей среды в продукте добывающих скважин. Если требуется, то известные геофизические данные могут быть объединены с имеющимися данными о градиенте ускорения силы тяжести. А более конкретно, данные по градиенту могут быть "наилучшим образом подогнаны" к геофизическим данным для получения модели коллектора с предсказанием вперед и/или данные по градиенту могут быть аналогично "наилучшим образом подогнаны" к геофизическим данным, используя методы инверсного преобразования для получения наилучшей модели коллектора и модельной границы между вытесняющей текучей средой и добываемым углеводородом.
Для получения информации о подземной плотности могут использоваться либо методы моделирования вперед (также известный как непрямой метод) либо прямые методы. Методы моделирования вперед начинаются с использования существующих знаний о пластах коллектора, в которые выполняется нагнетание, и делаются предположения об изменениях в уровнях насыщенности различными текучими средами, при этом включаются знания, полученные из других геологических измерений (например, сейсмических) и других наблюдений за нефтяным месторождением, таких как изменения давления и температуры в наблюдаемых скважинах. Из этой начальной модели могут быть сделаны вычисления градиентов с течением времени. Для этого может быть использован метод моделирования вперед Талвани (Talwani), раскрытый в работе "Вычисление с помощью цифрового компьютера магнитных аномалий, вызванных телами произвольной формы" ("Computation with the help of a digital computer of magnetic anomalies caused by bodies of arbitrary shape, Geophysics, vol. 30, 5, pps. 797-817 (1965)). Вычисленные значения сравниваются с наблюдаемыми значениями градиента с течением времени и начальная модель с использованием метода итераций модифицируется так, чтобы вычисленные значения соответствовали значениям, полученным в результате наблюдений. Анализ величин насыщенности в конечной модели дает положение фронта между вытесняющей текучей средой и смещаемыми углеводородами.
В прямых методах используются существующие знания о коллекторе в качестве граничных условий и полученные при наблюдении данные инвертируются для получения изменений подземной плотности, которые, как и в методах моделирования вперед, связаны с изменениями насыщенности текучими средами.
Когда получены данные по градиенту с течением времени (т.е. 4D), то для определения изменения распределения подземной плотности (морфология пластов) за временной интервал имеются многочисленные машинные методы вычислений. Прямые методы использования данных по градиенту для оценки распределения плотности попадают в категорию линейных задач, а прямые методы, которые определяют возмущения границы для тел с постоянной плотностью, попадают в категорию нелинейных задач, как описано Д.У. Васко в статье "Разрешение и вариационные операторы ускорения силы тяжести и градиометрия ускорения силы тяжести", опубликованной в Геофизике (D.W. Vasco, Resolution and Variance Operators of Gravity and Gravity Gradiometry, Geophysics, vol. 54, no. 7 (July 1989), pps. 889-899). Решение Васко линеаризует соотношения между призмами (массовой плотности или изменения плотности) и связанными с ними градиентами ускорения силы тяжести и решает обратное преобразование путем итераций, используя обобщенные инверсии. Прямые методы также включают методы, описанные С. К. Римером и Дж.Ф. Фергюсоном в статье "Метод упорядоченного двумерного обратного преобразования Фурье ускорения силы тяжести в приложении к кальдере Безмолвного Каньона в Неваде", опубликованной в Геофизике (S.К. Reamer, L.F. Ferguson, Regularized two-dimensional Fourier gravity inversion method with application to the Silent Canyon caldera, Nevada, Geophysics, vol. 54, 4 (April 1989), pps. 486-496) и методы с импульсами Галеркина, описанные в включенной выше предварительной заявке США 60/099,937, поданной 11 сентября 1998. Вообще и для метода Васко могут быть включены ограничивающие условия, такие как толщина пласта больше или равна нулю или все границы лежат под поверхностью; другие ограничивающие условия включают разумные диапазоны для плотности по М. Куер и Р.Байер, как описано в статье "Программы на Фортране для решения линейных инверсных задач", опубликованной в Геофизике (M. Cuer, R. Bayer, Fortran Routines for Linear Inverse Problems, Geophysics, vol. 45, 11 (November 1980), pps. 1706-1719).
Начальная модель будет улучшена при увеличении данных и может быть получена единственная наилучшая известная оценка в этот момент времени. Модель, передняя или обратная, затем аналитически возмущается для определения взаимосвязи между изменениями градиента ускорения силы тяжести и изменениями морфологии пластов. Непрямые методы для возмущения стартовой или начальной модели вперед включают "Направленные методы Монте Карло алгоритма модельной "закалки" и генетического алгоритма ["Метод общей оптимизации в геофизическом обратном преобразовании", М. Сен и П.Л. Стоффа ("Global Optimization Method in Geophysical Inversion, M. Sen, P.L. Stoffa, Elsevler, Amsterdam, 1995)].
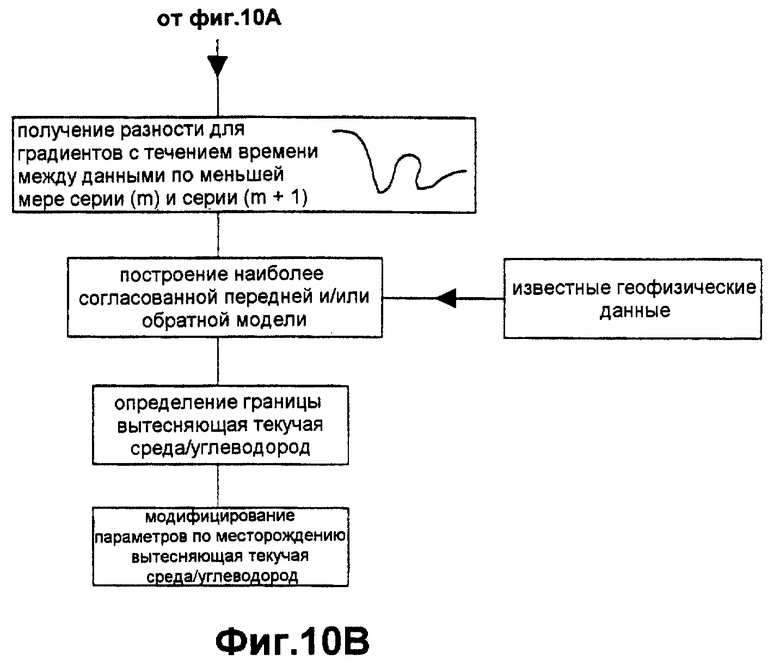
Затем фактический градиент ускорения силы тяжести (графическое представление которого для Гxz и Гxx показано на фиг.11) сравнивается с предсказанным по теоретической модели для выработки последовательных итераций модели, чтобы наблюдалось стремление к схождению градиентов, с последовательно уменьшающимися разностями при сравнениях. По мере получения дополнительных данных измерений, как показано в тестовой последовательности на фиг.10А и 10В, модель последовательно улучшается. Перед каждым уточнением модели данные измерений обрабатываются для устранения известных и статистически оцененных источников ошибок, включая эффекты геологического "шума".
При достаточном количестве данных измерений возможно с помощью компьютерного процессора для обработки данных создать отображаемую на компьютере анимацию перемещения и морфологии границы раздела со временем для отображения на компьютерном мониторе или подобном устройстве отображения. Обработанные данные, полученные при отображении, дают информацию о границе между вытесняющей текучей средой и добываемым углеводородом. Затем перемещение границы и скорости перемещения могут быть графически отпечатаны или нанесены на график для использования управляющим нефтяным месторождением, который может управлять нагнетаемыми скважинами в отношении параметров давления и количества для использования морфологии границы таким образом, чтобы получить максимальную добычу при наиболее низкой стоимости вторичной добычи. Иллюстрация углеводородных границ и их изменения также могут использоваться управляющим нефтяным месторождением для идентификации возможных зон поглощения, как предполагалось на участках 22, 23 месторождения, показанных на фиг. 3. Обеспечение управляющего нефтяным месторождением таким наглядным представлением развивающейся ситуации позволяет ему применять этот анализ для оценки, корректировки и компенсации для изменения условий и поддержания или увеличения добычи на месторождении.
Несмотря на то, что в качестве предпочтительного измерительного прибора для выявления градиента ускорения силы тяжести показан градиометр типа акселерометра, также подходят другие устройства, способные измерять или иным образом устанавливать локальный градиент ускорения силы тяжести. К другим устройствам относятся парные гравиметры такого типа, в которых используются падающие массы в вакуумированном пространстве, при этом ускорение падающей массы измеряется с помощью лазерного луча и высокоточных часов, а также приборы, чувствующие ускорение силы тяжести, в которых используются сверхпроводниковые датчики.
Настоящее изобретение предлагает выгодные способ и систему для оптимизации измерений, выполняемых с помощью градиометра ускорения силы тяжести, для выявления подземных границ текучей среды в случае вторичной добычи нефти, с помощью которых стоимость добычи может быть понижена и/или может быть увеличено количество добытого углеводорода. Настоящее изобретение аналогичным образом хорошо подходит для использования при выявлении перемещения подземных текучих сред, включая, например фронты загрязненных и/или токсичных текучих сред.
Как будет понятно специалистам в данной области техники, различные изменения и модификации могут быть выполнены в способе и системе для вторичной добычи углеводорода, которые проиллюстрировали настоящее изобретение, не выходя за пределы существа и объема изобретения, как оно определено в прилагаемой формуле и в устанавливаемых по закону ее эквивалентах.



Использование: для контроля аномалий гравитационного поля при вторичной добычи нефти. Сущность: измерения градиента ускорения силы тяжести, выполняемые с помощью градиометра типа акселерометра, оптимизируются путем наклона плоскости измерительного прибора, в котором проводятся измерения, на выбранный угол выше и ниже горизонта для получения данных, из которых могут быть исключены систематические ошибки измерительного прибора с помощью вычитания или какой-либо другой обработки, и путем снятия данных при направлении с первым азимутом, а затем при направлении со вторым ортогональным азимутом для того, чтобы получить абсолютные независимые измерения градиента. Технический результат: оптимизация добычи углеводородов, добываемых вторичными. 2 с. и 4 з.п. ф-лы, 11 ил.
Приоритет по пунктам:
06.11.1998 по пп. 1 и 4;
11.05.1999 по пп. 2, 3 и 6.
| Вертикальный градиентометр | 1973 |
|
SU651285A1 |
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| US 5218864 А, 15.06.1993 | |||
| US 5357802 А, 25.10.1994 | |||
| СПОСОБ НАСТРОЙКИ ГРАДИЕНТОМЕТРА | 1988 |
|
SU1593420A1 |
| ГРАВИТАЦИОННЫЙ ТРЕХКОМПОНЕНТНЫЙ ГРАДИЕНТОМЕТР | 1992 |
|
RU2046380C1 |

