ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к отображению радиолокационных изображений, а более точно - к способу создания такого отображения путем объединения множества радиолокационных изображений в мозаику этих изображений. Настоящее изобретение также относится к электрическим компьютерам и системам обработки данных, а более точно - к их приложениям к науке о Земле, например метеорологии. Настоящее изобретение также относится к организации систем обработки информации, а более точно - к использованию искусственного интеллекта с особенностями системы искусственного интеллекта, для таких наук, как науки о Земле, например метеорология. Настоящее изобретение также относится к системам связи, направленным радиоволновым системам и устройствам (например, радиолокационным или радионавигационным), а более точно - к схемам отображения метеорологических радиолокационных станций, многоэлементных радиолокационных станций, предназначенным для получения отображения или преобразования развертки, и к направленным радиоволновым системам и устройствам для указания положения (триангуляции) места шторма.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
В некоторых случаях существует потребность объединения нескольких радиолокационных изображений в одно мозаичное изображение, охватывающее некоторую географическую область. Настоящее изобретение предназначено для удовлетворения этой потребности.
По территории США разбросано большое количество метеорологических радиолокационных пунктов. Существует национальная метеорологическая радиолокационная сеть, состоящая из новых метеорологических обзорных доплеровских радиолокационных станций NEXRAD WSR-88D и более ранних недоплеровских метеорологических радиолокационных станций WSR-57 и WSR-74. Каждый такой пункт может работать независимо, но диапазоны этих пунктов могут перекрываться. Необходимо собирать данные из этих пунктов в одну мозаику, показывающую метеорологические условия в конкретном регионе или по всей стране. Настоящее изобретение предназначено для удовлетворения этой потребности.
Мозаика данных радиолокации дает информацию о месте и интенсивности осадков и непогоды в большой географической области и, следовательно, полезна для метеорологов и других людей, отвечающих за оперативный контроль и прогноз метеорологических условий. Создание мозаики данных радиолокации обычно требует преобразования точек данных из локальной географической системы координат (в которой определяют положения относительно отдельного радиолокационного пункта) в географическую систему координат мозаики. Преобразование (перепроецирование) точек данных - это задача, требующая большого объема вычислений, но при этом необходимо гарантировать и точность. Однако данные радиолокации даже из одного пункта могут состоять из свыше 100000 отдельных значений данных, каждое из которых нужно перепроецировать. Мозаика может быть построена на данных десятка таких радиолокационных пунктов. Следовательно, существует потребность в точном объединении всех этих данных из всех желаемых пунктов достаточно быстро, чтобы обеспечить текущее изображение погоды. Настоящее изобретение направлено на удовлетворение этой потребности.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
В основу настоящего изобретения поставлена задача разработки устройства и способа объединения данных из множества пунктов в одно изображение, охватывающее желаемую географическую область.
Еще одна задача настоящего изобретения состоит в том, чтобы разработать устройство и способ объединения в реальном масштабе времени данных радиолокации, например метеорологических данных радиолокации, в цифровом формате из многочисленных радиолокационных пунктов в мозаику, охватывающую некоторую географическую область.
Еще одна задача настоящего изобретения состоит в том, чтобы разработать устройство и способ объединения данных из множества источников в одно изображение, которое можно обработать на компьютере общего назначения, например на персональном компьютере.
Еще одна задача настоящего изобретения состоит в том, чтобы разработать устройство и способ, способные обеспечить создание мозаики данных радиолокации, которая может дать информацию о месте и интенсивности осадков и других метеорологических явлений в большой географической области.
Еще одна задача настоящего изобретения состоит в том, чтобы разработать устройство и способ, способные обеспечить точное объединение большого количества данных из множества желаемых пунктов достаточно быстро, чтобы обеспечить текущее изображение метеорологических или иных явлений.
И еще одна задача настоящего изобретения состоит в том, чтобы разработать устройство и способ, способные обеспечить точное и эффективное построение мозаик данных радиолокации.
Эти и другие задачи настоящего изобретения решают с помощью устройства и способа преобразования каждого из множества элементов дискретизации данных радиолокации в соответствующее местоположение сетки или клетку в мозаичном изображении. Однако, хотя каждый элемент дискретизации отображают в клетку сетки мозаики, не в каждый такой прямоугольник сетки в зоне обзора радиолокационной станции можно поместить элемент дискретизации. Это объясняется тем, что может быть больше клеток сетки, чем элементов дискретизации радиолокационной станции, или потому, что элементы дискретизации данных радиолокационной станции не полностью перекрываются. После завершения отображения элементов дискретизации в клетки предлагаемые устройство и способ обеспечивают возвращение назад и заполнение пустых мест следующим образом. Элементы дискретизации радиолокационных данных отображают в заранее заданную сетку части получаемого отображения. Каждый раз, когда в элемент этой сетки помещают элемент дискретизации, "задают" и соответствующий элемент во временной матрице. После этого проверяют временную матрицу на наличие "незаданных" или пустых элементов. Если обнаруживают элемент матрицы без элемента дискретизации, то находят ближайший по расположению элемент дискретизации данных. Этот ближайший элемент дискретизации данных и его соответствующее место в сетке используют для заполнения пустого места в сетке мозаики.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Преимущества и отличительные признаки настоящего изобретения станут очевидны из нижеследующего подробного описания изобретения со ссылками на прилагаемые чертежи, на которых:
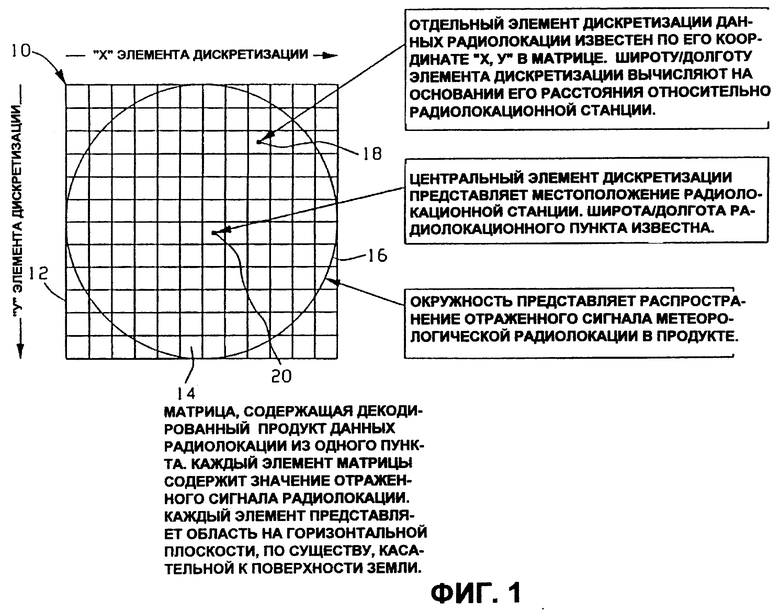
фиг. 1 изображает двухмерную матрицу для отображения продукта радиолокации из одного пункта согласно изобретению;
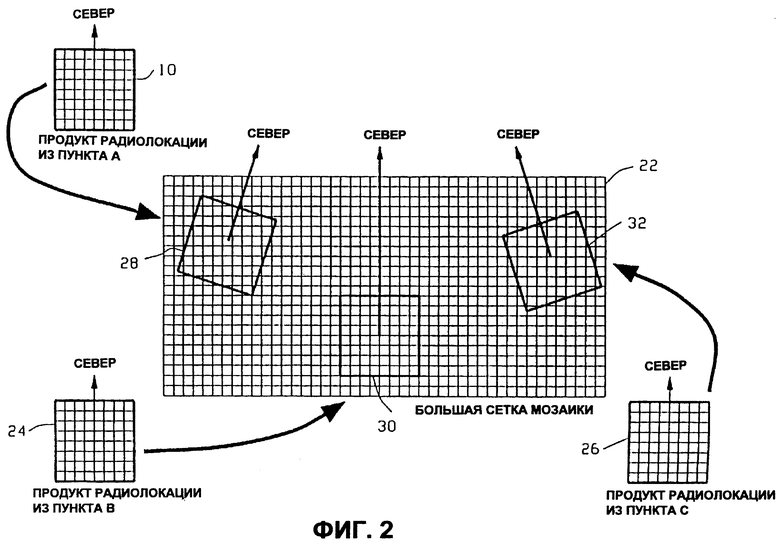
фиг.2 изображает вариант отображения данных отдельного продукта метеорологической радиолокации в сетку большей мозаики согласно изобретению;
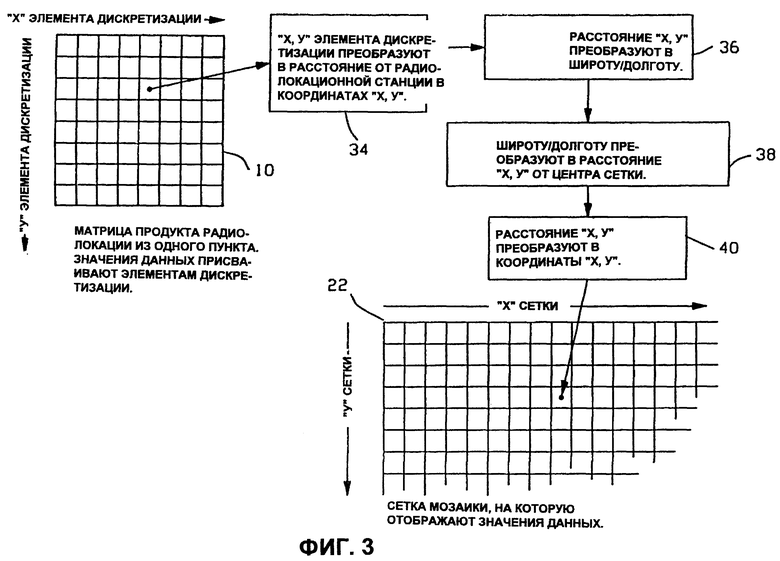
фиг. 3 изображает схему обзора для косвенного отображения отдельных значений данных радиолокации в сетку мозаики согласно изобретению;
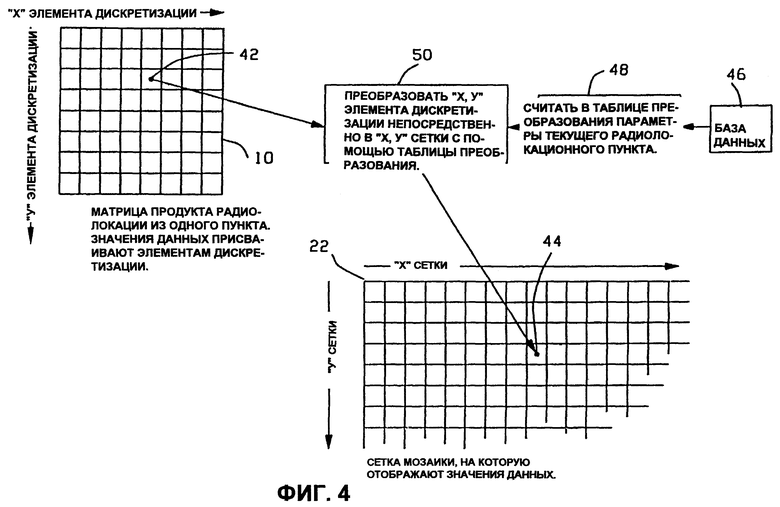
фиг. 4 изображает схему обзора непосредственного отображения отдельных значений данных радиолокации в сетку мозаики согласно предпочтительному варианту воплощения изобретения;
фиг.5 изображает таблицу преобразования, которую используют в заявленном способе согласно изобретению;
фиг. 6 изображает изображение на дисплее при картографировании данных радиолокации, которое имеет пробелы в местах, где сетки данных источника и данных пункта назначения не совпадают согласно изобретению;
фиг.7 изображает схему заполнения любого пустого места согласно изобретению;
фиг. 8А, 8В, 8С, 8D и 8Е изображают алгоритмы способа построения таблицы преобразования согласно изобретению;
фиг. 9А, 9В, 9С, 9D и 9Е изображают алгоритмы одного способа построения мозаики данных радиолокации с использованием таблиц преобразования согласно изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ЛУЧШИХ ВАРИАНТОВ ВОПЛОЩЕНИЯ ИЗОБРЕТЕНИЯ
Матрица 10 (фиг.1) построена из множества элементов или пикселов, один из которых обозначен позицией 12. Каждый элемент матрицы, например элемент 12, содержит одно значение отраженного радиолокационного сигнала. Каждый такой элемент представляет собой конечную область на горизонтальной плоскости, по существу, касательной к поверхности Земли. Матрица 10 содержит один пример декодированного продукта 14 данных радиолокации из одного пункта. В матрице 10 представление продукта 14 ограничено окружностью 16, представляющей распространение отраженного сигнала данных метеорологической радиолокации в продукте. В продукте 14 положение отдельного элемента дискретизации данных радиолокации, например положение 18, идентифицирует по его координатам х, у в матрице, причем широту и долготу элемента дискретизации вычисляют на основании его расстояния относительно радиолокационного пункта. Центральный элемент дискретизации 20 представляет местоположение радиолокационного пункта. Для фиксированного радиолокационного пункта широта и долгота радиолокационного пункта известны, так что привязка отдельного элемента дискретизации к местоположению центрального элемента дискретизации обеспечит точную информацию о положении и для этого отдельного элемента дискретизации. Данные радиолокации из одного пункта принимают в цифровом формате, что позволяет распределить значения данных в запоминающем устройстве для программ электронной вычислительной машины в виде двухмерной матрицы 10. Каждый элемент матрицы, например элемент 12, является "элементом дискретизации" данных, который отображает атмосферный параметр, например интенсивность осадков, в относительно малой конечной области, например 1 километр на 1 километр. Таким образом, координаты любого элемента дискретизации, например элемента 18, могут дать информацию о географическом расстоянии "х, у" этого элемента дискретизации от радиолокационного пункта.
Однако зачастую нужно использовать более одного продукта радиолокации в одной матрице сетки или одном визуальном представлении метеорологических условий в регионе. Это может произойти из-за того, что диапазон двух радиолокационных пунктов может перекрываться или из-за того, что желательно показать на одном дисплее данные радиолокации для географической области, которая достаточно велика, чтобы включать в себя множество радиолокационных пунктов. В таких ситуациях мозаику строят, взяв отдельные элементы дискретизации данных из радиолокационных данных для одного пункта и присваивая значения этих элементов дискретизации соответствующим местам в сетке большого масштаба, например региональной или национальной, которая предпочтительно находится в запоминающем устройстве компьютера в виде двухмерной матрицы 22.
Пример формирования такой мозаики приведен на фиг.2. Пример представляет отображение отдельных данных продукта метеорологической радиолокации из матриц 10, 24 и 26, например, из разных радиолокационных пунктов в сетку 22 мозаики большего масштаба. Каждая матрица 10, 24 и 26 отображает продукт радиолокации из одного пункта А, В или С соответственно. Каждая матрица 10, 24 и 26 аналогична матрице 10 (фиг.1). Данные из матрицы 10 объединяют с данными из других таких матриц 24 (фиг.2) и 26 для построения сетки 22 мозаики, которая охватывает географическую область, включающую все три радиолокационных пункта. Таким образом, матрицу 10 (фиг.2) отображают в часть или подматрицу 28 сетки 22, матрицу 24 отображают в часть или подматрицу 30 сетки 22, а матрицу 26 отображают в часть или подматрицу 32 сетки 22. Система координат данных радиолокации из одного радиолокационного пункта не обязательно согласована с системой координат сетки 22 мозаики. То есть элементы дискретизации матриц 10, 24 и 26 и клетки сетки 22 не обязательно имеют одинаковый размер, а соответствующие системы координат не обязательно ориентированы одинаково. По этой причине координаты каждого элемента дискретизации из матрицы 10, 24 или 26 нужно преобразовать (перепроецировать) в координаты сетки 22.
Один способ перепроецирования координат отдельной точки данных, например, для перехода от матрицы 10 к сетке 22 согласно изобретению, показан на фиг. 3. Осуществляют косвенное отображение отдельных значений данных радиолокации, например, из матрицы 10, в сетку мозаики, например сетку 22. В матрице 10 продукта радиолокации из одного пункта значения данных присвоены элементам дискретизации. Каждый элемент дискретизации преобразуют в широту и долготу, а затем преобразуют эти широту и долготу в соответствующее местоположение в сетке. На шаге 34 каждый набор координат "х, у" элемента дискретизации преобразуют в расстояние от радиолокационного пункта 20 по осям "х" и "у". На шаге 36 расстояние в виде значений "х" и "у" затем преобразуют в географические широту и долготу. На шаге 38 эти значения широты и долготы затем преобразуют в расстояние "х, у" от центра сетки 22, используя теперь оси "х" и "у" сетки 22. На шаге 40 это расстояние "х, у" преобразуют в соответствующие значения координат "х" и "у" для сетки 22. Таким образом, значения данных из матрицы 10 отображают в сетку 22 мозаики. Аналогичную процедуру можно использовать для отображения значений из других матриц 24, 26 в сетку 22. Хотя этот подход точен, он не является предпочтительным, поскольку требует большего объема вычислений - шаги 34, 36, 38 и 40 и, следовательно, не желателен для работы в реальном масштабе времени на компьютере общего назначения, например на персональном компьютере.
Альтернативный и более предпочтительный способ отображения данных из сетки одного пункта или матрицы 10 продукта в сетку 22 мозаики показан на фиг. 4. Этот способ более эффективен в реальном масштабе времени, чем предыдущий, поскольку обеспечивает отображение элементов дискретизации данных радиолокации непосредственно в сетку 22 с помощью заранее построенных таблиц преобразования.
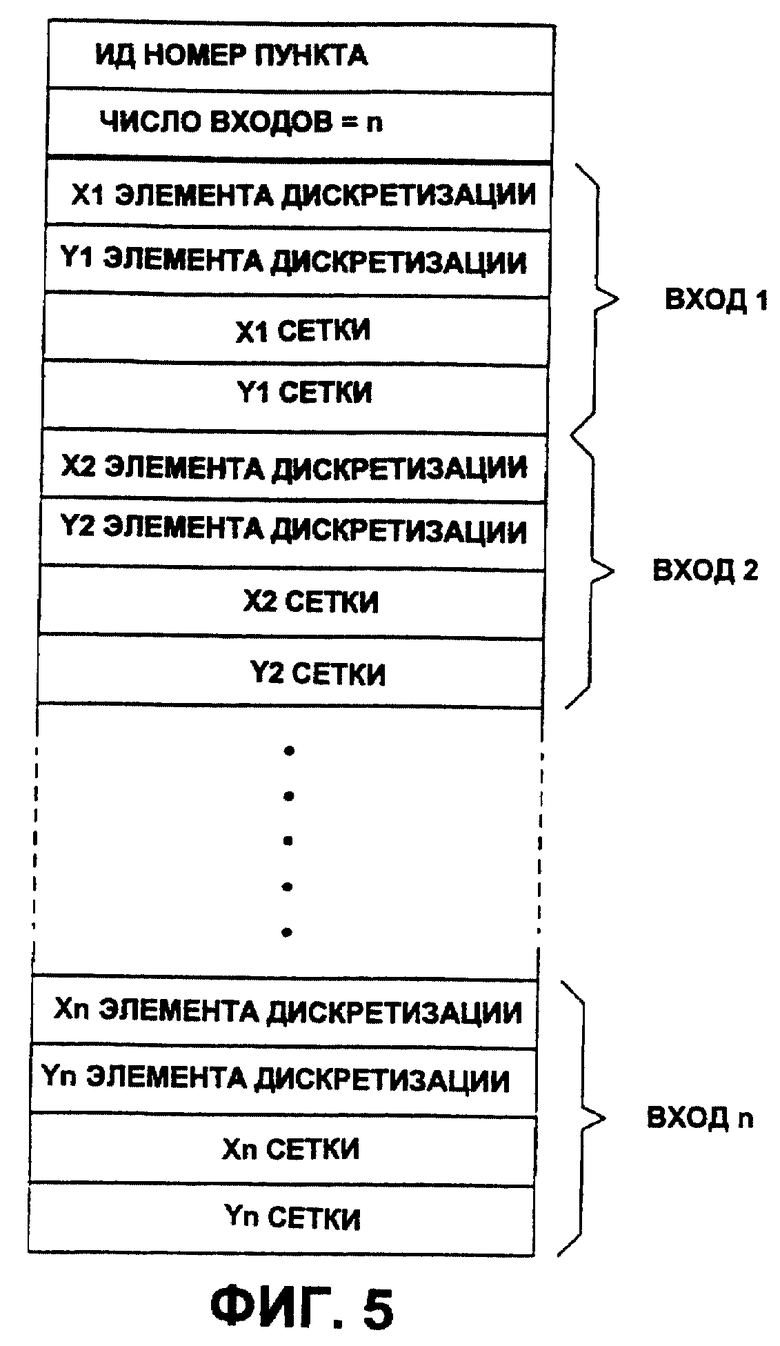
Таблицы преобразования строят с помощью алгоритмов, требующих большого объема вычислений (фиг.8) и показанных в соответствующем коде, чтобы вычислить широту и долготу каждого элемента дискретизации данных радиолокации и преобразовать значения этих широты и долготы в местоположения клеток сетки 22. Пункты радиолокации метеорологических данных обычно имеют фиксированные местоположения, так что местоположение и ориентация матрицы 10, 24 или 26 продукта для каждого такого пункта относительно местоположения и ориентации сетки 22 известны. Эти таблицы преобразования предпочтительно строят в автономном режиме и предпочтительно запоминают в виде файлов в базе данных 46 компьютера. Программа (фиг.9), которая строит мозаику, затем считывает информацию в файле подходящей таблицы преобразования по мере того, как обрабатывает данные из каждого пункта. Каждая таблица преобразования содержит список значений "х, у" и соответствующих значений "х, у" сетки, которому предшествует количество входов в самой таблице. Предпочтительный формат таблицы преобразования показан на фиг.5. Каждый вход в таблице преобразования обрабатывают путем присвоения значения данных радиолокации из "х, у" элемента дискретизации соответствующему местоположению "х, у" сетки.
На фиг. 4 в матрице 10 продукта радиолокации из одного пункта значения данных присвоены элементам дискретизации в этой матрице. Непосредственное отображение, например, элемента дискретизации 42 в клетку 44 осуществляют следующим образом. Таблицу преобразования для каждого пункта запоминают в базе данных 46. Когда имеет место отображение матрицы 10 в сетку 22, считывают таблицу преобразования для матрицы 10 этого пункта из базы данных 46 на шаге 48. Затем каждый элемент дискретизации, например элемент дискретизации 42 матрицы 10, отображают в клетку, например клетку 44 сетки 22, путем преобразования значений координат "х" и "у" этого элемента дискретизации непосредственно в значения координат "х, у" для сетки 22 посредством нахождения первых в таблице преобразования и считывания местоположения соответствующей клетки сетки из этой таблицы на шаге 50. Сетка 22 - это сетка мозаики, в которую отображают значения данных, например, из матрицы 10. Фактически шаги 34, 36, 38 и 40 осуществляют предварительно в автономном режиме, чтобы уменьшить объем обработки, необходимой при работе в реальном масштабе времени.
На фиг. 5 приведен пример формата файла для таблицы преобразования. Все вводимые значения являются целыми числами. Каждый файл специфичен для определенного пункта. Кроме того, каждый файл специфичен для системы координат и пространственного разрешения отдельного продукта, например продукта 14, и сетки мозаики, например сетки 22. Данная координата "х, у" элемента дискретизации может быть парной с более, чем одной координатой "х, у" сетки. Аналогично данная координата "х, у" сетки может быть парной с более, чем одной координатой "х, у" элемента дискретизации. Однако существует по меньшей мере один вход таблицы для каждой координаты "х, у" элемента дискретизации и существует по меньшей мере один вход для каждой координаты "х, у" сетки. Тем не менее, общее количество входов не должно превышать количество элементов дискретизации или количество клеток, в которых осуществляется отображение.
Матрица элементов дискретизации данных продукта, например матрица 10, 24 или 26, не обязательно будет полностью согласована с матрицей 22 мозаики. В результате этого некоторые клетки сетки будут вмещать более одного элемента дискретизации. По аналогичным причинам некоторые клетки сетки в диапазоне данных радиолокации не будут содержать никаких элементов дискретизации. В последнем случае в построенной мозаике должны оставаться "пустые места" (фиг. 6) 52 там, где сетки источника и места назначения, т.е. элементы дискретизации радиолокационной станции и сетка мозаики, не согласуются.
Для заполнения таких пустых мест 52 в сетке 22 используют дополнительную обработку. Этот способ реализуют следующим образом. При построении таблицы преобразования, показанном на фиг.8, идентифицируют местоположение каждого "пустого места" в сетке и отображают ближайший элемент дискретизации в клетку сетки, имеющей пустое место. Это делают с помощью временной матрицы (фиг. 7) для нахождения незаполненных клеток сетки в области обзора радиолокационной станции. Каждый раз, когда координата "х, у" оказывается парной с положением "х, у" сетки, задают элемент временной матрицы 54. Затем после завершения обработки всех местоположений "х, у" элементов дискретизации осуществляют "обратный расчет" для всех незаданных или незаполненных клеток сетки во временной матрице 54 в диапазоне радиолокационной станции, для которой затем строят таблицу преобразования. При таком обратном расчете местоположение "х, у" клетки сетки преобразуют в широту и долготу, а затем преобразуют эти широту и долготу в соответствующую координату "х, у" элемента дискретизации, чтобы найти ближайший по местоположению элемент дискретизации к этой координате "х, у" элемента дискретизации для пустого места. Каждую такую пару, "найденных путем обратного расчета" "х, у" элемента дискретизации и "х, у" сетки, добавляют в качестве входа в таблицу преобразования для этого радиолокационного пункта. Этот способ гарантирует, что каждый элемент дискретизации данных присваивается сетке мозаики и что каждой рассматриваемой затем клетке сетки в диапазоне радиолокационной станции присваивается некоторое значение данных.
На фиг.7 показано использование временной матрицы 54 для заполнения пустого места в сетке 22. Каждый элемент временной матрицы 54 может содержать любое из трех значений: первое исходное "пустое" значение (например, 1); второе "незаданное" значение (например, 0) для каждого соответствующего элемента или клетки сетки, попадающего в диапазон радиолокационной станции; и третье "заданное" значение (например, +1), указывающее, что элемент дискретизации радиолокационной станции отображен в соответствующий элемент сетки. В подматрице (например, в подматрице 32) сетки 22 элементы дискретизации данных метеорологической радиолокации из соответствующей матрицы продукта (например, матрицы 26) отображены в сетку 22 с ориентацией сетки 22, а не с ориентацией исходной матрицы, которую затем отображают. При таком способе отображения каждый раз, когда элемент сетки 22 получает элемент дискретизации, "устанавливают" соответствующий элемент во временной матрице 54, чтобы показать это. Затем проверяют временную матрицу 54 на наличие каких-либо "незаданных" или незаполненных элементов. Во временной матрице 54 окружность 56 представляет диапазон метеорологических данных в отображаемом затем продукте метеорологической радиолокации. Все элементы матрицы 54 в пределах окружности 56 предназначены для помещения в них элемента дискретизации или значения данных из соответствующей матрицы продукта, отображаемой в сетку 22. Если обнаружен элемент матрицы 54, который не "задан" таким образом, то осуществляют обратный расчет, чтобы найти заполненный элемент дискретизации данных, который является ближайшим по местоположению к этому элементу матрицы. Потом "х, у" этого элемента дискретизации и "х, у" его соответствующего местоположения в сетке вводят в таблицу преобразования, чтобы заполнить пустое место, которое в противном случае образовалось бы в сетке 22 мозаики.
Чтобы реализовать способ, соответствующий фиг.4, необходим двухэтапный способ построения мозаики. Первый из двух этапов, показанный на фиг.8А-8Е, можно осуществить автономно и на его основе строят таблицы преобразования и запоминают их в базе данных 46. Второй этап, который предназначен для работы в реальном масштабе времени и на котором используют заранее построенные таблицы преобразования для фактического построения мозаики (мозаик), показан на фиг.(9А-9Е).
Способ построения таблиц преобразования (фиг.8А-8Е), специфичных для пунктов, можно вкратце описать следующим образом. Способ реализуют для каждого радиолокационного пункта с построением отдельной таблицы для каждого радиолокационного пункта. Сначала присваивают каждому элементу во временной матрице 54 начальное значение, чтобы отразить "пробел" или стертое значение. Для каждого элемента во временной матрице преобразуют координаты "х, у" элемента в расстояние или предел от радиолокационного пункта. Если предел находится в области охвата данных радиолокации, определенной окружностью 56, то маркеру, сопровождающему этот элемент временной матрицы, присваивают индикатор "незаданный". Для каждого отображаемого затем элемента дискретизации данных радиолокации продукта радиолокации преобразуют координату "х, у" элемента дискретизации в широту и долготу; полученные широту и долготу элемента дискретизации преобразуют в местоположение "х, у" в сетке; найденную таким образом результирующую пару "х, у" элемента дискретизации и "х, у" сетки присваивают подходящему местоположению в таблице преобразования для этого пункта; для этой пары вычисляют местоположение "х, у" элемента временной матрицы; и найденному таким образом местоположению "х, у" элемента временной матрицы присваивают указание "заданный", показывающее, что в этом месте нет пропуска. После этого выполняют следующие шаги для каждого элемента во временной матрице 54. Сначала определяют, является ли элемент временной матрицы незаданным и поэтому находится в области охвата данных радиолокации, но ему не присвоен элемент дискретизации данных радиолокации. Если это так, то преобразуют координаты "х, у" элемента временной матрицы в координаты "х, у" сетки; полученные координаты "х, у" сетки преобразуют в широту и долготу; полученные значения широты и долготы преобразуют в координаты "х, у" элемента дискретизации радиолокационной станции; и заносят полученную пару координат "х, у" элемента дискретизации и координат "х, у" сетки в таблицу преобразования для этого продукта радиолокации из одного пункта, чтобы заполнить или частично заполнить пустое место в сетке мозаики. И, наконец, полученную таблицу преобразования заносят в файл в базе данных 46.
Способ построения мозаики данных радиолокации с помощью таблиц преобразования (фиг. 9) можно вкратце описать следующим образом. Сначала каждому местоположению или элементу в большой сетке 22 присваивают подходящее, заранее заданное значение. Затем выполняют следующие шаги для каждого радиолокационного пункта. Считывают из базы данных самый последний продукт данных метеорологической радиолокации для этого пункта. Потом декодируют этот продукт радиолокации и присваивают отдельные значения данных из этого продукта двухмерной матрице. Затем считывают из базы данных 46 соответствующую, заранее построенную таблицу преобразования. Потом для каждого входа извлекают из этой таблицы преобразования соответствующую координату "х, у" элемента дискретизации и соответствующую ей координату "х, у" сетки. После этого извлекают из декодированного продукта радиолокации значение данных продукта в месте нахождения "х, у" этого элемента дискретизации. Затем присваивают это значение данных продукта соответствующему местоположению "х, у" в сетке, полученному из таблицы преобразования. Эти три последних шага повторяют для каждого входа в этой таблице преобразования. И, наконец, кодируют полученные объединенные данные радиолокации в сетке и записывают их в файл в базе данных 46.
На фиг.8А, 8В, 8С, 8D, 8Е представлен алгоритм способа построения таблиц преобразования. Эти таблицы преобразования являются существенными составными частями способа (фиг.4) и соответствующей ему системы построения мозаик данных радиолокации в реальном масштабе времени, например в цифровом компьютере общего назначения. Способ можно реализовать в виде программы математического обеспечения электронного компьютера, причем эту программу предпочтительно запускать в автономном режиме, когда время не критично, так что вычисления, требующие затрат времени, проводят при реализации способа построения таблицы преобразования и, следовательно, до того, как могут потребоваться результаты этих вычислений.
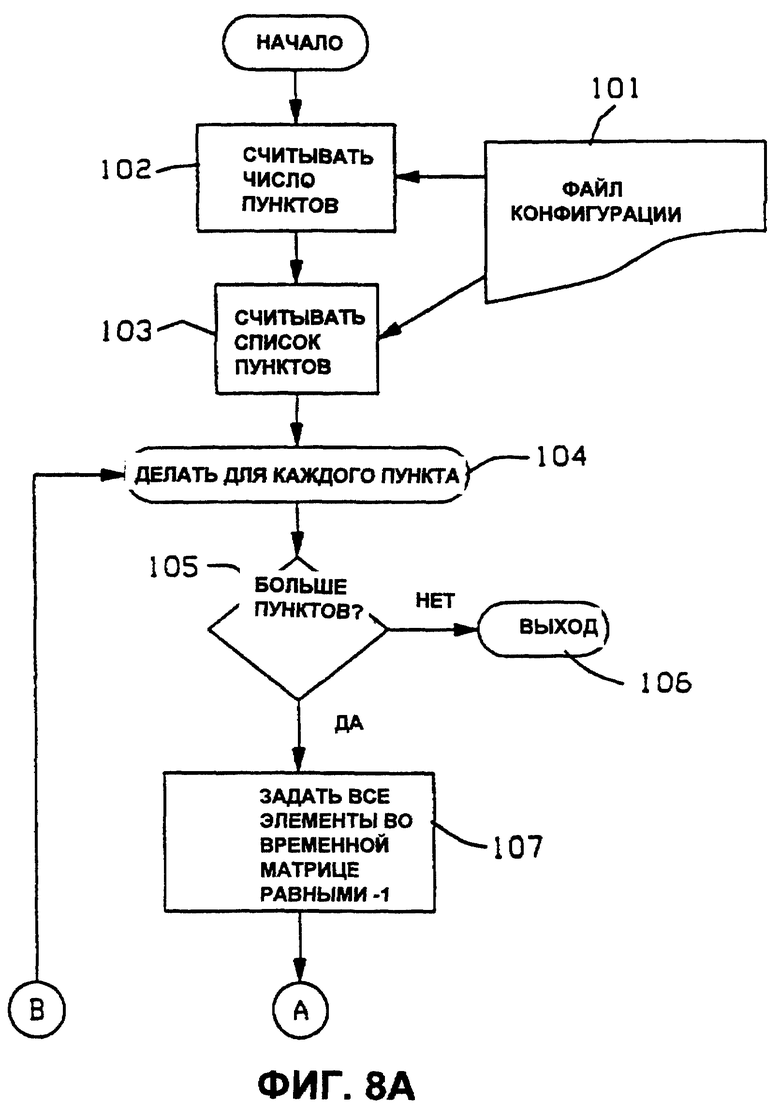
В программе используют созданный вручную файл конфигурации 101 (фиг.8А), который содержит информацию об одном или нескольких пунктах, для которых надо построить таблицу преобразования. Файл конфигурации 101 содержит количество пунктов, широту, долготу и идентификационный номер для каждого пункта. На шаге 102 программа считывает количество пунктов из файла 101, а на шаге 103 считывает информацию о пункте из файла 101 и запоминает ее в запоминающем устройстве электронной вычислительной машины для последующего использования. Затем на шаге 104 программа входит в цикл для обработки каждого такого пункта в этом списке. Этот цикл выполняют до тех пор, пока не будут обработаны все пункты (это определяют на шаге 105), и в этот момент программа завершается - шаг 106. Обработка с помощью такого алгоритма для каждого пункта начинается на шаге 107 присвоением начальных значений временной матрице путем присвоения значения -1 всем элементам этой матрицы.
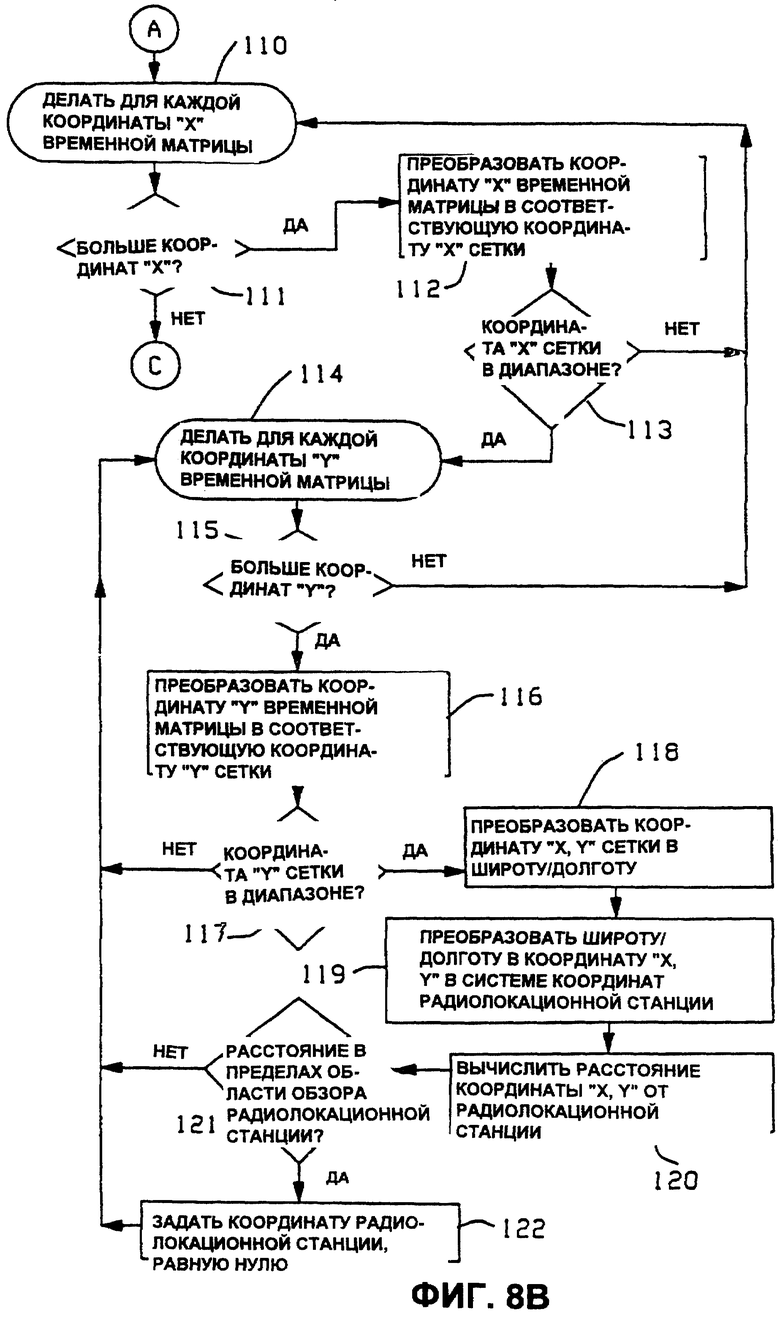
Затем строят временную матрицу по программе (фиг.8В), чтобы указать, какие элементы этой временной матрицы расположены в пределах области обзора радиолокационной станции. На шаге 110 эта программа выполняет цикл для каждой координаты "х" во временной матрице до тех пор, пока все координаты "х" не будут обработаны (это определяют на шаге 111). В этом втором цикле обрабатываемую затем координату "х" временной матрицы преобразуют на шаге 112 в соответствующую координату "х" матрицы сетки. Потом на шаге 113 определяют, находится ли полученная координата "х" сетки снаружи от границы сетки. Если это так, то программа переходит к следующей координате "х" временной матрицы - шаги 110, 111 и 112. Так должно быть для всех пунктов, расположенных вблизи от восточного или западного краев сетки, например, интересующего региона, где временная матрица 54 заходит за край сетки 22. Или же для действительной координаты "х" сетки программа переходит к еще одному циклу, начинающемуся на шаге 114, для каждой координаты "у" во временной матрице до тех пор, пока все координаты "у" не будут обработаны - шаг 115. На шаге 116 координату "у" временной матрицы, рассматриваемую затем в третьем цикле, преобразуют в соответствующую координату "у" матрицы сетки. Если на шаге 117 обнаруживают, что полученная координата "у" сетки находится снаружи от границы сетки, то программа переходит к следующей координате "у" временной матрицы - шаги 114, 115 и 116. Так должно быть для пунктов, расположенных вблизи от северного или южного краев сетки или интересующего географического региона, где временная матрица заходит за край сетки. Или же для действительных координат "у" сетки на шаге 118 положение "х, у" сетки, найденное на шагах 112 и 116, преобразуют в широту и долготу с помощью уравнений проекции, которые определяют конкретную используемую сетку. Например, для этого можно использовать уравнения конформной проекции Ламберта. Поскольку сетку обрабатывают как плоскую, а используют для отображения криволинейной поверхности, некоторая часть процесса проецирования будет использована для преобразования сетки в криволинейную поверхность или наоборот. Различные пути выполнения такого проецирования известны в картографии. Затем на шаге 119 преобразуют широту и долготу в значения координат "х" и "у" системы координат радиолокационной станции, т.е. системы координат для продукта радиолокации из одного пункта. На шаге 119 необходимо подходящее картографическое (или подобное) преобразование из широты и долготы в систему координат матрицы продукта радиолокации. Преобразование, противоположное этому, было осуществлено на шаге 118, за тем исключением, что координаты сетки не обязательно должны соответствовать координатам матрицы продукта радиолокации из одного пункта. Затем координату "х" и координату "у", найденные на шаге 119, используют на шаге 120 для вычисления расстояния в матрице продукта радиолокации места, определенного координатой "х, у", от радиолокационного пункта. На шаге 121 определяют, находится ли расстояние, найденное на шаге 120, в пределах области обзора радиолокационной станции, определяемой окружностью 16 (фиг.1). Если это так, то значение элемента временной матрицы, определяемого координатой "х, у", используемой на шагах 112 и 116, задают равным нулю на шаге 122, чтобы указать, что соответствующее значение элемента дискретизации радиолокационной станции определяется матрицей продукта радиолокации из одного пункта. В любом случае, программа переходит к следующей координате "у" на шаге 114.
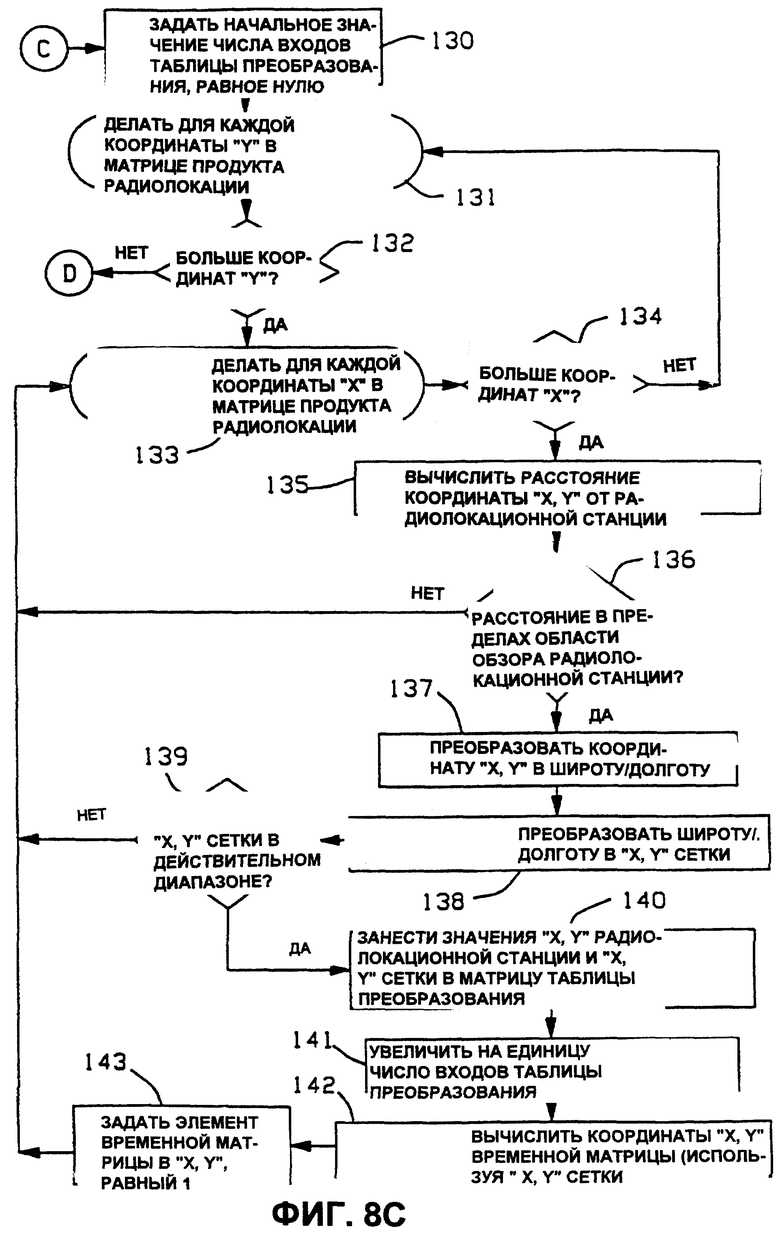
Сразу же после задания временной матрицы (фиг.8В) для идентификации элементов, попадающих в область обзора радиолокационной станции, происходит переход к формированию таблицы преобразования (фиг.8С). Формирование таблицы преобразования начинается на шаге 130, на котором количество входов таблицы преобразования задают равным нулю. Затем, начиная с шага 131, программа проводит цикл для каждой координаты "у" в растровой матрице продукта радиолокации до тех пор, пока все координаты "у" в этой матрице не будут обработаны - шаг 132. Для каждой итерации цикла, начинающегося на шаге 131, программа проводит цикл, начинающийся на шаге 133, для каждой координаты "х" в растровой матрице продукта радиолокации. Выход из этого цикла осуществляют на шаге 134 с возрастом к шагу 131, когда все координаты "х" в растровой матрице продукта радиолокации обработаны с помощью цикла, начинающегося на шаге 133. В цикле, начинающемся на шаге 133 с использованием текущей координаты "х, у" растровой матрицы продукта радиолокации, определяют на шаге 135 расстояние этой координаты в этой матрице от радиолокационного пункта. На шаге 136 определяют, выходит ли расстояние, вычисленное на шаге 135, за пределы области обзора радиолокационной станции. Если это так, то программа переходит к следующему положению "х, у" путем возврата к шагу 133. В противном случае положение находится в пределах области обзора радиолокационной станции, так что осуществляют дальнейшую обработку (фиг.8С). В процессе дальнейшей обработки на шаге 137 обрабатываемую затем координату "х, у" сначала преобразуют в широту/долготу. Термин "координата" или "положение" относится к значению "х" и значению "у", которые вместе (как декартовы координаты) определяют местоположение в системе, матрице, сетке, на поверхности и т. п. На шаге 138 полученную широту/долготу преобразуют в соответствующее положение "х, у" в системе координат сетки. На шаге 139 полученную координату "х, у" сетки проверяют на действительность. Если на шаге 139 установлено, что положение "х, у" сетки, найденное на шаге 138, недействительно (не находится в пределах заданных границ сетки), то такие координаты не заносят в создаваемую затем таблицу преобразования, и программа переходит к следующему обрабатываемому элементу в матрице продукта радиолокации путем возврата к шагу 133. В противном случае на шаге 140 координату "х, у" растровой матрицы продукта радиолокации и соответствующую координату "х, у" сетки, найденную на шаге 138, заносят в матрицу таблицы преобразования, формируемую затем в запоминающем устройстве электронной вычислительной машины. Затем на шаге 141 общее количество входов этой таблицы преобразования увеличивают на единицу. Напомним, что перед входом программы в цикл на шаге 131 этому количеству было присвоено нулевое начальное значение на шаге 130. После шага 141 координату "х, у" сетки, найденную на шаге 138 и занесенную в таблицу преобразования на шаге 140, используют на шаге 142 для вычисления координаты "х, у" временной матрицы, соответствующей этой координате "х, у" сетки. На шаге 143 значение элемента временной матрицы в этом положении "х, у" задают равным значению +1, чтобы указать, что соответствующая клетка сетки занята по меньшей мере одним значением данных из растровой матрицы продукта радиолокации. После этого программа возвращается к шагу 133. Если на шаге 132 установлено, что все координаты "у" в матрице продукта радиолокации обработаны с помощью цикла, начинающегося на шаге 131, то программа переходит к алгоритму, показанному на фиг.8D.
После того как все элементы в растровой матрице продукта радиолокации обработаны (фиг.8С), программа размещает в пределах области обзора радиолокационной станции все клетки сетки, которые не согласованы с координатой или положением из растровой матрицы продукта радиолокации (фиг.8D). Это осуществляют путем поиска временной матрицы для всех незаданных элементов, которым присвоено нулевое значение на шаге 122 (фиг.8В). Осуществляют цикл, начинающийся на шаге 150 (фиг.8D), для каждой координаты "х" во временной матрице до тех пор, пока больше не останется координат "х" для обработки - шаг 151. В этом цикле проводят еще один цикл, начинающийся на шаге 152, для каждой координаты "у" для рассматриваемой затем в цикле, начинающемся на шаге 150, координаты "х" до тех пор, пока все такие координаты "у" не будут обработаны - шаг 153. В этом цикле после определения на шаге 153, есть ли еще какие-либо координаты "у" для обработки, на шаге 154 оценивают значение в текущем местоположении "х, у" во временной матрице. На шаге 154 определяют, равен ли нулю элемент временной матрицы в месте "х, у", к которому затем адресуются оба цикла (фиг.8D). Если у этого места ненулевое значение, то оно находится либо снаружи от области обзора радиолокационной станции, либо согласовано с местоположением элемента дискретизации данных радиолокации. В противном случае, когда местоположение "х, у" остается незаданным (в этом примере ему присвоено нулевое значение), то в мозаике есть пустое место. Для каждого такого пустого места необходимо согласование с координатой элемента дискретизации данных радиолокации, ближайшего по положению к этому пустому месту. Если такое пустое место существует, то на шаге 155 определяют координату "х, у" сетки по координате "х, у" временной матрицы, рассмотренной на шаге 154. На шаге 156 преобразуют полученную координату "х, у" сетки в широту/долготу с помощью уравнений, рассмотренных выше, которые определяют проекцию сетки. Затем на шаге 157 преобразуют широту/долготу, найденную на шаге 156, в ближайшую координату "х, у" в системе координат матрицы продукта радиолокации. На шаге 158 определяют, действительна ли координата "х, у", найденная на шаге 157. Если нет, то процесс возвращается к шагу 153. Потом на шаге 159 определяют, действительна ли координата "х, у", определенная на шаге 155; если нет, то процесс возвращается к шагу 153. Если координата "х, у" продукта радиолокации действительна и координата "х, у" сетки действительна, т.е. находится в пределах интересующего региона, то на шаге 160 эти координаты заносят в матрицу таблицы преобразования на следующее имеющееся место в этой матрице. Если существует недействительная координата, то процесс переходит к следующему элементу временной матрицы на шаге 153. После того как координата "х, у" продукта радиолокации и соответствующая координата "х, у" введены в матрицу таблицы преобразования, на шаге 161 увеличивают на единицу общее количество входов в таблице преобразования. От шага 161 процесс возвращается к шагу 153. Если больше нет координат(ы) "у", то процесс возвращается к шагу 150, адресуясь к следующей координате "х" (фиг.8D). Если больше нет координат "х" для обработки, то программа переходит от шага 151 к шагу 170 (фиг. 8Е).
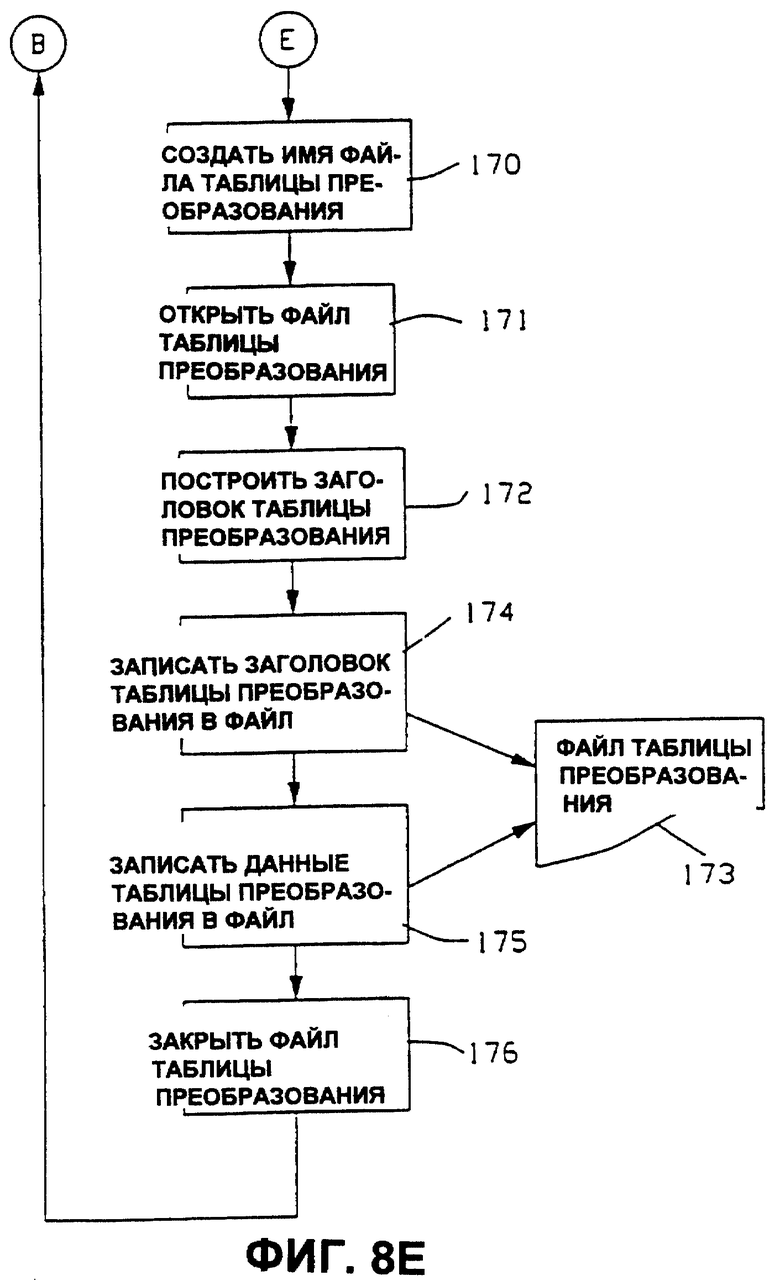
Сразу же после создания таблицы преобразования (фиг.8D) программа запоминает созданную таблицу в файле, например на диске памяти электронной вычислительной машины (фиг.8Е). Сначала на шаге 170 создают особое имя файла для таблицы преобразования, связывающее текущий идентификационный номер пункта с файлом. Затем на шаге 170 открывают файл для вывода. После этого на шаге 172 программа создает заголовок таблицы преобразования в запоминающем устройстве, содержащем, помимо другой информации, количество входов в эту таблицу, определенное на шагах 130, 141 и 161. Потом программа записывает в новый файл 173 таблицу преобразования на шагах 174 и 175. Сначала на шаге 174 записывают заголовок, созданный на шаге 172, в файл 173 таблицы преобразования, за которым на шаге 175 следует завершенная таблица преобразования. Затем файл 173 таблицы преобразования закрывают на шаге 176. Потом программа возвращается к шагу 104 (фиг.8А), чтобы продолжить обработку до тех пор, пока не будут завершены таблицы преобразования для всех пунктов в списке пунктов. При переносе или вводе одного или нескольких пунктов в мозаику необходимо лишь вернуться к программе, показанной на фиг.8А-8Е; работа программы, показанной на фиг.8А-8Е, в реальном масштабе времени необязательна.
Построение таблицы преобразования в соответствии с настоящим изобретением можно реализовать в программном обеспечении.
На фиг.8А-8Е приведен алгоритм программного обеспечения.
На фиг.9А, 9В, 9С, 9D, 9Е приведен алгоритм программы построения мозаики данных радиолокации. Программа предназначена для работы в реальном масштабе времени путем использования таблиц преобразования, построенных автономной программой (фиг.8А-8Е).
После запуска программа работает в режиме непрерывного процесса. Используют созданный вручную файл конфигурации 200, содержащий список пунктов, используемых в мозаике, для инициализации процесса на шагах 201 и 202. Сначала процесс считывает из файла конфигурации 200 число пунктов - шаг 201 и список пунктов - шаг 202, который затем запоминают в запоминающем устройстве для дальнейшего использования. Затем происходит вход в цикл - шаг 203, который идет непрерывно (фиг.9В) в виде так называемого цикла "ДЕЛАТЬ ВСЕГДА". Выполнение цикла приводит к созданию новой мозаики, которая является комбинацией большинства текущих данных из отдельных пунктов, указанных в списке пунктов. При подготовке к созданию мозаики все элементы двухмерной сетки в запоминающем устройстве электронного компьютера задают на шаге 204, равными одному и тому же заранее установленному значению, например нулю, т.е. очищают сетку от всех существующих данных. Затем дают указание "перейти к текущему пункту в списке пунктов" - шаг 205, чтобы перейти к первому пункту в списке. Потом происходит вход в еще один цикл, на котором обрабатывают радиолокационные пункты в списке пунктов по одному за раз - шаг 206 до тех пор, пока все пункты не будут обработаны - шаг 207.
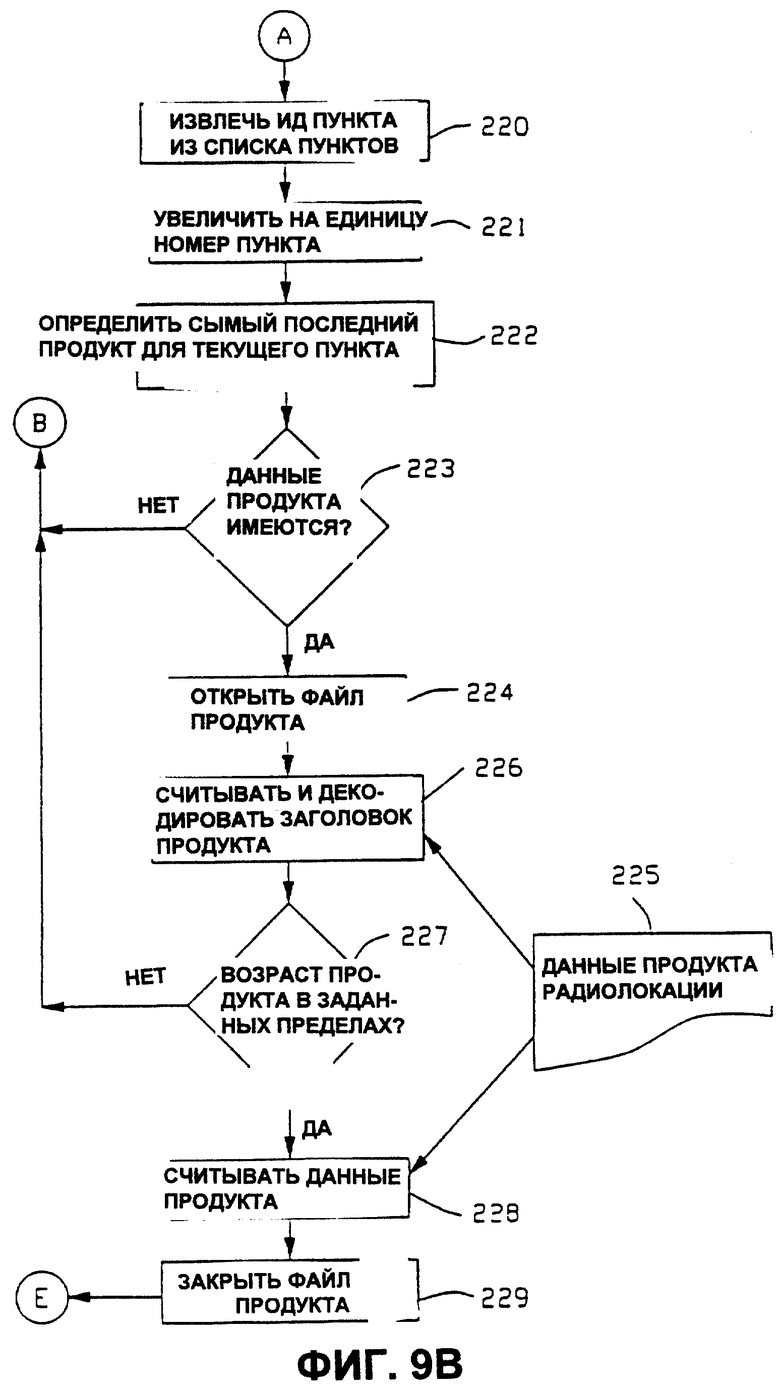
Обработка каждого радиолокационного пункта начинается (фиг.9В) извлечением идентификационного (ИД) номера пункта из списка пунктов - шаг 220 с последующим увеличением индекса пункта на единицу - шаг 221. Программа использует ИД номер пункта для размещения данных из текущего пункта в локальной базе данных 46 электронной вычислительной машины - шаг 222. Если для текущего пункта нет данных - шаг 223, то программа переходит к следующему пункту. В противном случае программа идентифицирует большинство текущих данных для пункта. Эти данные, называемые продуктом, остаются в файле 225 данных продукта радиолокации в локальной базе данных 46. Сначала этот файл открывают - шаг 224 и считывают "заголовок" продукта - шаг 226 в запоминающее устройство для программ. Заголовок содержит информацию, например дату и время получения данных и длину данных продукта. Если при проверке данных и времени получения продукта установлено, что данные слишком старые - шаг 227, то программа пропускает этот пункт и переходит к следующему пункту. В противном случае, используя длину данных, считывают остаток файла 225 - шаг 228 в запоминающее устройство электронной вычислительной машины, после чего закрывают файл 225 продукта - шаг 229.
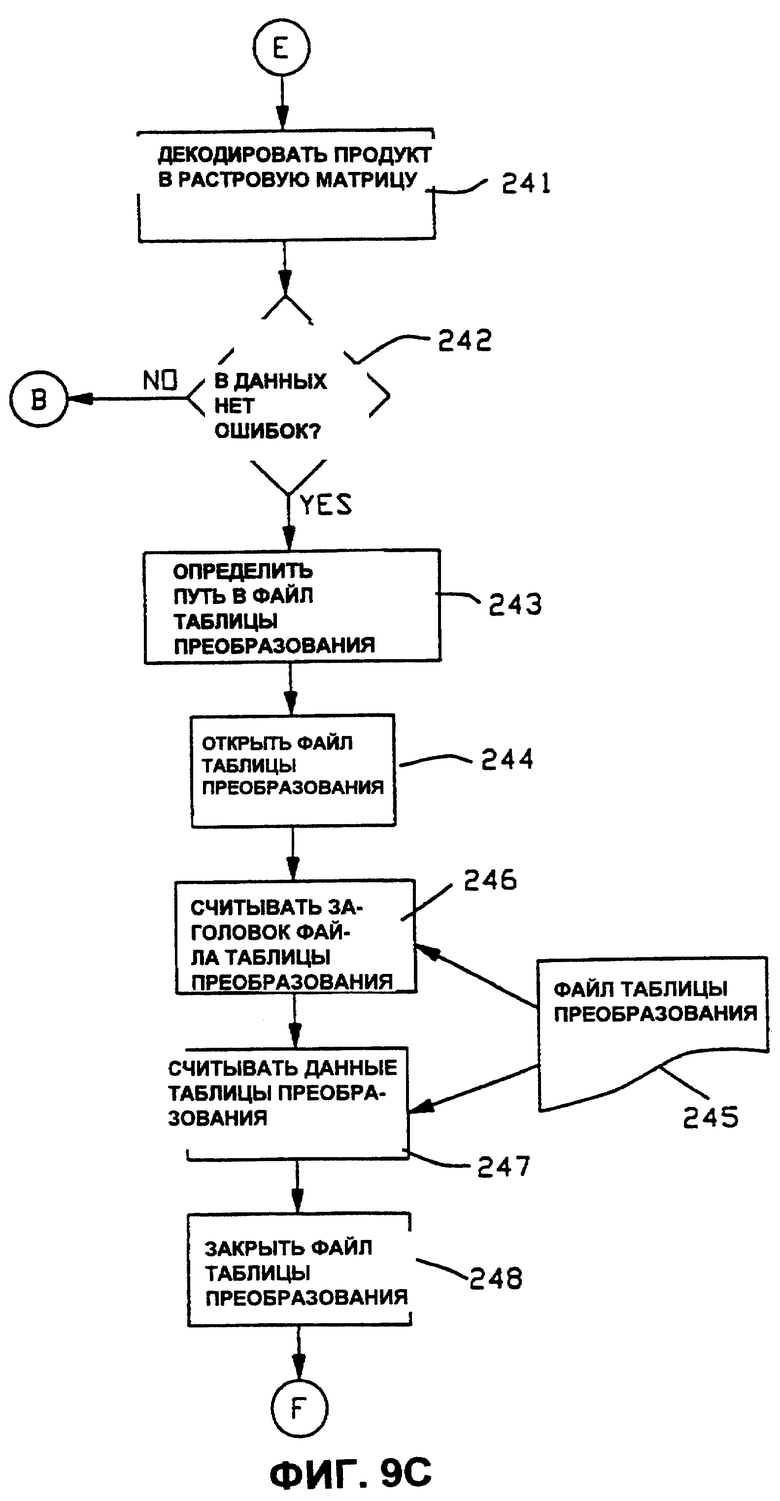
Затем (фиг.9С) данные продукта декодируют и запоминают - шаг 241 в двухмерной "растровой" матрице. Если в процессе декодирования обнаружены какие-либо ошибки, то программа переходит к следующему пункту - шаг 242. Когда продукт успешно декодирован, программа использует текущий ИД номер радиолокационного пункта, чтобы определить местоположение файла подходящей таблицы преобразования в локальной базе данных 46 электронной вычислительной машины - шаг 243. Сначала открывают файл 245 таблицы преобразования - шаг 244 и считывают - шаг 246 заголовок, содержащий входы таблицы в запоминающее устройство для программ. Потом программа использует входы таблицы, чтобы считать - шаг 247 из файла 245 полную таблицу преобразования, которую затем запоминают в запоминающем устройстве для программ. После этого файл 245 таблицы преобразования закрывают - шаг 248.
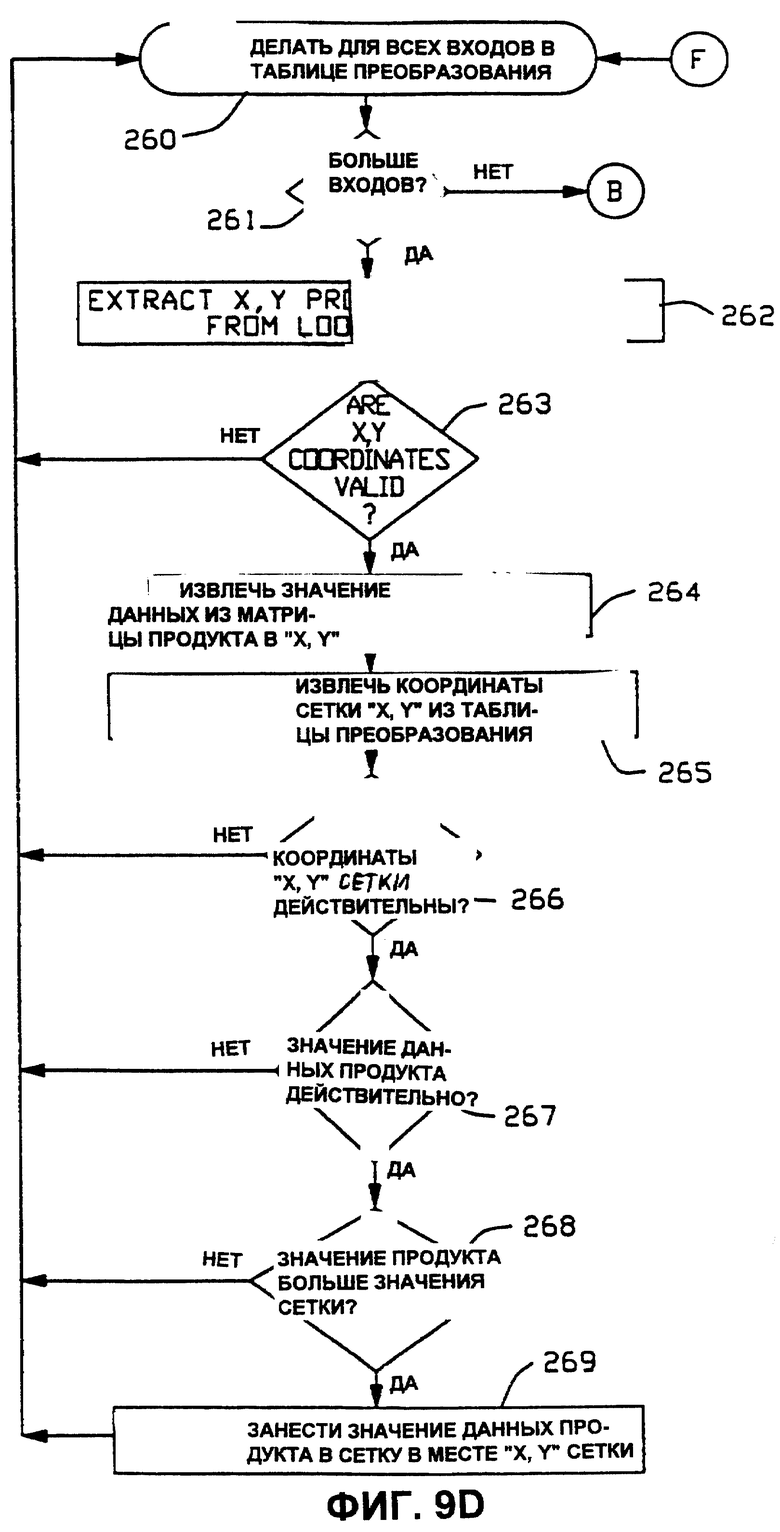
На фиг. 9D показано, как сразу после считывания таблицы преобразования, данные радиолокации из одного пункта, которые остаются в растровой матрице продукта, заносят в двухмерную сетку. Для обработки всех входов в таблице преобразования осуществляют вход в цикл - шаг 260. Когда вся обработка завершена, программа переходит к следующему пункту - шаг 261. Сначала извлекают показания "х" и "у" в двухмерную растровую матрицу продукта из таблицы преобразования - шаг 262 и проверяют их действительность - шаг 263. Недействительный вход никогда не существует на практике, но если он все же возникает, программа пропускает этот вход и переходит к следующему входу. Затем извлекают значение данных продукта - шаг 264 из матрицы данных продукта. Потом извлекают показания "х" и "у" из таблицы преобразования - шаг 265. Эти координаты также проверяют на действительность - шаг 266. На практике никогда не должно быть недействительного входа, но если он все же обнаружен, то программа переходит к следующему входу. Затем проверяют значение данных продукта на действительность - шаг 267, любые недействительные значения данных заставляют программу переходить к следующему входу таблицы преобразования. Потом сравнивают значение продукта - шаг 268 с существующим значением сетки и, если оно больше, заносят его в сетку в месте "х, у", а если не больше, то пропускают. Обработку продолжают таким образом для всех оставшихся входов в таблице преобразования.
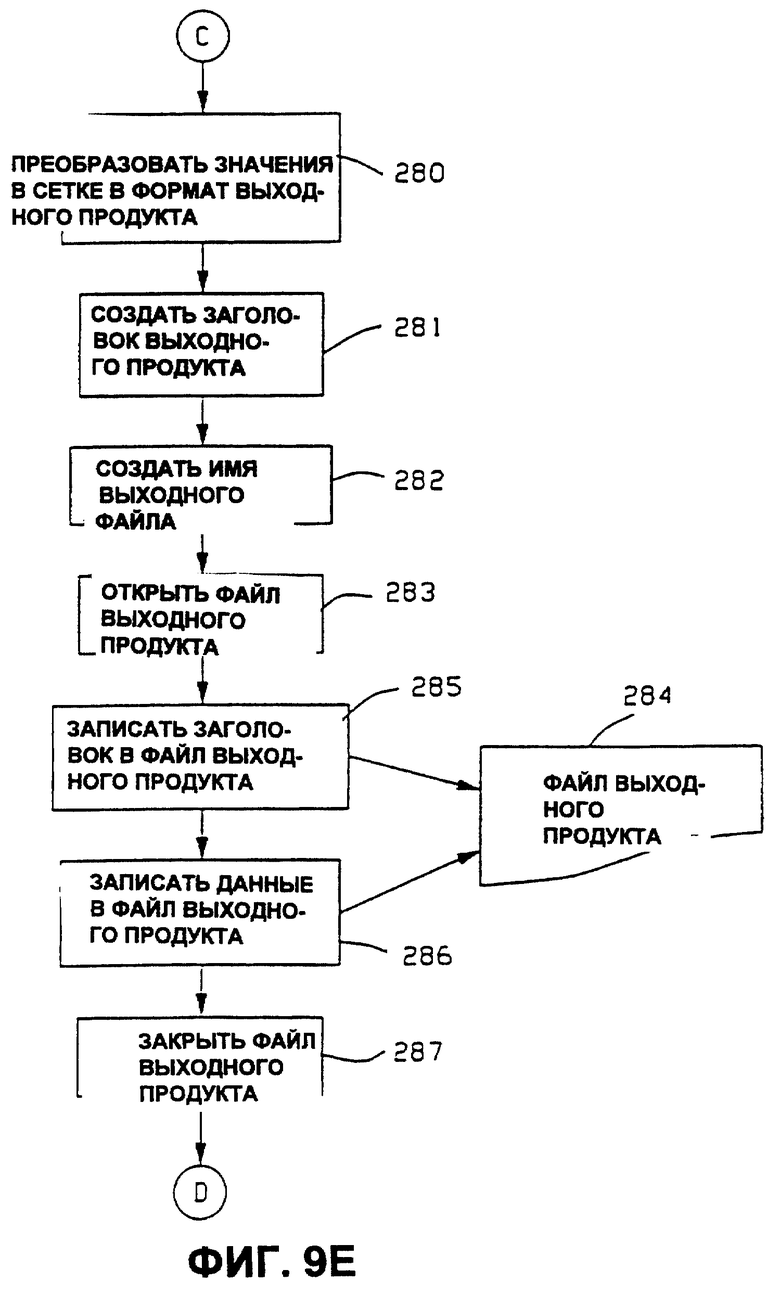
После того как обработаны все имеющиеся пункты, данные сетки преобразуют в новый продукт (фиг. 9Е). Сначала данные сетки преобразуют - шаг 280 в формат выходного продукта и заносят в буфер в запоминающем устройстве компьютера. Затем также в запоминающем устройстве компьютера создают заголовок - шаг 281, содержащий текущую дату и время, а также длину данных продукта. Создают особое имя выходного файла - шаг 282 и открывают файл под этим именем для вывода - шаг 283. Затем данные переписывают в файл 284 выходного продукта. Сначала записывают заголовок продукта - шаг 285, за которым следуют сами данные продукта - шаг 286. И, наконец, файл 284 выходного продукта закрывают - шаг 287, после чего программа переходит к началу построения следующей мозаики.
Непосредственное отображение отдельных данных радиолокации на сетку с использованием одной или нескольких заранее построенных таблиц преобразования, созданных с помощью приведенного выше программного обеспечения, можно внедрить в программное обеспечение.
На фиг.9А-9Е показан алгоритм программного обеспечения, где использованы шаги 48 и 50 (фиг.4). Вышеуказанное программное обеспечение и программное обеспечение, приведенное ниже, совместно реализуют шаги 34, 36, 38 и 40 (фиг.3).
Устройство и способ согласно изобретению осуществляют преобразование элемента дискретизации или подобного ему элемента данных радиолокации в место на сетке или клетку получаемой мозаики, а не наоборот. Если бы происходило обратное, то можно было бы случайно пропустить элементы дискретизации данных радиолокации.
Настоящее изобретение дает возможность построить мозаику с помощью любых данных, которые по характеру являются географическими или какими-либо иными территориальными в самом широком смысле этого понятия, или относятся к слиянию в точки одной мозаики данных из множества поверхностей. Тем не менее, настоятельно рекомендуется иметь такие данные в растровом формате. Тем самым можно объединять данные из разных пунктов для получения одной мозаики.
Настоящее изобретение можно реализовать с помощью заранее построенных таблиц преобразования или путем осуществления расчетов перепроецирования в реальном масштабе времени. Однако для более быстрой работы и скорейшего получения ответа в реальном масштабе времени предпочтительным является использование таблиц преобразования.
Теперь должны быть совершенно очевидны некоторые из многочисленных преимуществ изобретения. Например, устройство и способ предназначены для объединения данных из многочисленных источников в одну или несколько мозаик, что должно подходить для использования конечными пользователями. Такие устройство и способ обеспечивают возможность точного и эффективного построения мозаики. Кроме того, с их помощью можно идентифицировать местоположение любых пустых мест в мозаике. Настоящее изобретение также обеспечивает заполнение пустых мест.
Таким образом, разработаны устройство и способ объединения данных из множества пунктов в одно изображение, охватывающее желаемую географическую область. Такие устройство и способ обеспечивают возможность объединения в реальном масштабе времени данных радиолокации, например данных метеорологической радиолокации или иных данных в цифровом формате из многочисленных радиолокационных пунктов в мозаику, охватывающую некоторую географическую область. Такие устройство и способ также обеспечивают возможность объединения данных из множества источников в одно изображение, которое можно запускать на электронной вычислительной машине общего назначения, например на персональном компьютере. Такие устройство и способ обеспечивают возможность получения мозаики данных метеорологической радиолокации, которые могут дать информацию о месте и интенсивности осадков и иных метеорологических явлений в большой географической области. При использовании таблиц преобразования настоящее изобретение может обеспечить точное объединение значительного количества данных из множества желаемых пунктов достаточно быстро, чтобы получить текущее изображение метеорологических или иных явлений.




Изобретение относится к отображению радиолокационных изображений путем объединения множества таких изображений. Его использование позволяет получить технический результат в виде обеспечения возможности объединять множество радиолокационных данных в общую мозаику данных. Реализуемый компьютерным устройством способ введения первого набора данных метеорологической локации, полученных из отраженных радиолокационных сигналов, в цифровом формате с первой системой координат в мозаику данных, закрывающую область со второй системой координат, заключается в том, что преобразуют первые координаты положений для первого набора данных радиолокации в первой системе координат во вторые соответствующие координаты положений во второй системе координат. Технический результат достигается благодаря тому, что последовательно формируют несколько матриц, над которыми осуществляют соответствующие преобразования, в результате которых получают требуемую единую мозаику данных. 2 с. и 1 з.п. ф-лы, 9 ил.
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПЕРФОЛЕНТЫ | 0 |
|
SU388282A1 |
| US 5150295 A, 22.09.1992 | |||
| US 5303342 А, 12.04.1994 | |||
| Пожарный двухцилиндровый насос | 0 |
|
SU90A1 |
| Генератор изображений | 1988 |
|
SU1522240A1 |
| АКОВЕЦКИЙ В.И | |||
| Дешифрирование снимков | |||
| - М.: Недра, 1983, с.363-364. | |||

