Изобретение относится к области контроля и диагностирования систем автоматического управления и их элементов и может использоваться для диагностирования линейных динамических объектов, содержащих ПИ-регуляторы.
Известен способ диагностирования апериодических звеньев, по которому в контролируемом объекте возможен поиск одиночных дефектов (Авторское свидетельство СССР N 781768, М.Кл. G 05 B 23/02, 1980).
Наиболее близким к предлагаемому изобретению техническим решением является способ измерения параметров реальных интегрирующих звеньев (Авторское свидетельство СССР N 711545, М.Кл. G 05 B 23/02, 1980), при котором процесс измерения состоит из двух операций: установки коэффициента передачи блока масштабирования и собственно измерения параметров звена.
Известно устройство диагностирования апериодических звеньев, по которому в контролируемом объекте возможен поиск одиночных дефектов (Авторское свидетельство СССР N 781768, М.кл. G 05 B 23/02, 1980).
Наиболее близким к предлагаемому изобретению техническим решением является устройство измерения параметров реальных интегрирующих звеньев (Авторское свидетельство СССР N 711545, М.Кл. G 05 B 23/02, 1980), имеющее сумматор и блок масштабирования, вход которого подключен к выходу исследуемого звена, выход - к первому входу сумматора, второй вход которого связан с выходом интегратора, а выход - со входом измерительного блока.
Недостатком этих способа и устройства является то, что для определения параметров исследуемого звена на него необходимо подать последовательно два тестовых сигнала - прямоугольный и ступенчатый сигнал, кроме этого, в процессе измерения параметров системы необходим этап компенсации, а само устройство не позволяет осуществлять контроль параметров звена.
Цель изобретения - расширение возможностей способа для контроля параметров динамических систем, содержащих изодромные звенья (ПИ-регуляторы), и упрощение процесса контроля параметров системы, что достигается сокращением времени измерения путем подачи только одного тестового сигнала и устранения этапа компенсации.
Указанная цель достигается тем что предлагается новая совокупность действий.
1. Предварительно определяют номинальные параметры диагностической модели звена вида
где y - выходной сигнал; k -коэффициент усиления; x - входной сигнал звена; T - постоянная времени; p - переменная Лапласа.
Для этого на вход заведомо исправного звена подают прямоугольный импульс с длительностью τ и амплитудой ν. Определяют время контроля звена Tк из соотношения Tк > τ , где τ - длительность тестового импульсного сигнала. Это неравенство вытекает из необходимости контроля переходных процессов, обусловленных как появлением, так и исчезновением тестового импульсного сигнала.
2. Определяют номинальное значение коэффициента усиления звена. Поскольку исследуемое звено линейно, к нему применим принцип суперпозиции, т.е. реакцию исследуемого звена на прямоугольный импульс можно рассматривать как сумму реакций звена на положительное ступенчатое воздействие, приложенное в момент времени t, и отрицательное ступенчатое воздействие той же амплитуды, приложенное в момент времени t + τ. Тогда реакция исследуемого звена на прямоугольный импульс длительности τ может быть представлена
где h(t) - реакция звена на ступенчатое воздействие с амплитудой ν. Для рассматриваемого звена
h(t) = ν•k•(t+T), (2)
где ν - амплитуда прямоугольного импульса.
Тогда из (1) и (2)
Установившееся значение выходного сигнала контролируемого звена (t _→ ∞)
y(∞) = ν•k•τ.
Отсюда можно найти номинальное значение коэффициента усиления контролируемого звена k:
Согласно формуле (4) выходной сигнал заведомо исправного звена делят на сигнал, численно равный произведению ν•τ, результат деления соответствует значению коэффициента усиления k заведомо исправного звена.
3. Определяют номинальное значение постоянной времени T звена. Реакция звена на прямоугольный импульс с длительностью τ и амплитудой ν представлена на фиг. 1. Из графика видно, что
ν•k•T = h(τ)-ν•k•τ,
где h(τ) - реакция звена на прямоугольный сигнал в момент времени τ.
Отсюда можно найти выражение для нахождения постоянной времени звена T:
Величину, численно равную коэффициенту усиления k заведомо исправного звена, умножают на величину, численно равную ν•τ, результат перемножения отнимают от выходного сигнала блока фиксации максимального значения выходного сигнала звена h(τ). Результат вычитания делят на произведение величины, численно равной коэффициенту усиления k заведомо исправного звена, и величины, равной ν. Результатом деления является сигнал, численно равный значению постоянной времени T заведомо исправного звена.
4. Вычитая из сигнала, равного постоянной времени T напряжения уставки, и изменяя величину уставки, добиваются минимальной по модулю разности между двумя сигналами. Полученное напряжение уставки считают номинальным значением постоянной времени Tном звена.
5. Вычитая из сигнала, равного коэффициенту усиления k напряжения установки, и изменяя величину уставки, добиваются минимальной по модулю разности между двумя сигналами. Полученное напряжение уставки считают номинальным значением коэффициента усиления kном звена.
6. Замещают заведомо исправное звено на контролируемое звено.
7. При контроле звеньев для каждого контролируемого звена выполняют операции, изложенные в пунктах 2 и 3 для определения k и T при неизменных значениях уставок, определенных в пунктах 4, 5.
8. Разность Δk между коэффициентом усиления контролируемого звена k и определенным ранее напряжением уставки kном подают на первую схему допускового контроля, на выходе которой при отклонении коэффициента усиления от номинального значения больше допустимого (|Δk| > Δk) появляется сигнал единичной амплитуды, являющийся признаком отклонения k от номинального значения.
9. Разность ΔT между постоянной времени контролируемого звена T и определенным ранее напряжением уставки Tном подают на вторую схему допускового контроля, на выходе которой при отклонении постоянной времени от номинального значения больше допустимого (|ΔT| > ΔT) появляется сигнал единичной амплитуды, являющийся признаком отклонения T от номинального значения.
В качестве ближайшего аналога устройства выбрано устройство, описанное в а. с. СССР N 711545, М.кл. G 05 B 23/02, 1980. Оно содержит интегратор, блок масштабирования, сумматор, блок измерения, исследуемое звено. Для контроля неисправностей в ПИ-регуляторах сконструировано устройство, функциональная схема которого представлена на фиг. 2, на фиг. 3 - структурная схема аналогового устройства, реализующего способ.
Устройство содержит:
1 - схему запуска;
2 - блок формирования импульсного сигнала;
3 - блок фиксации максимального значения сигнала;
4 - контролируемое звено;
5 - первый блок деления;
6 - первый сумматор;
7 - первый усилитель;
8 - второй сумматор;
9 - второй блок деления;
10 - первую схему допускового контроля;
11 - второй усилитель;
12 - третий сумматор;
13 - вторую схему допускового контроля;
14 - третий усилитель;
S1, S2 - диагностические признаки дефектов "K" и "T" соответственно.
Выход схемы запуска 1 соединен с управляющими входами блока формирования тестового импульсного сигнала 2 и блока фиксации максимального значения выходного сигнала звена 3, выход блока формирования тестового импульсного сигнала 2 соединен со входом контролируемого звена 4, выход которого соединен с первым входом первого блока деления 5, первым (инвертирующим) входом первого сумматора 6 и входом блока фиксации максимального значения выходного сигнала звена 3, на второй вход первого блока деления 5 подается сигнал, численно равный произведению ν•τ, выход блока фиксации максимального значения выходного сигнала звена 3 соединен со вторым (неинвертирующим) входом первого сумматора 6, выход первого блока деления 5 соединен со входом первого блока усиления 7 с коэффициентом усиления ν и первым (неинвертирующим) входом второго сумматора 8, выход первого блока усиления 7 соединен со вторым входом второго блока деления 9, на второй (инвертирующий) вход второго сумматора 8 подается напряжение уставки kном, выход второго сумматора 8 подключен к сигнальному входу первой схемы допускового контроля 10, управляющий вход которой соединен с выходом второго усилителя 11, на вход которого подается напряжение уставки kном, выход первого сумматора 6 соединен с первым входом второго блока деления 9, выход второго блока деления 9 соединен с первым (неинвертирующим) входом третьего сумматора 12, выход третьего сумматора 12 соединен с сигнальным входом второй схемы допускового контроля 13, управляющий вход которой подключен к выходу третьего усилителя 14, на вход третьего усилителя и инвертирующий вход третьего сумматора 12 подается напряжение уставки Tном.
Устройство работает следующим образом.
Схема запуска 1 запускает одновременно блок формирования импульсного сигнала и блок фиксации максимального значения выходного сигнала звена 3. Тестовый импульсный сигнал подается на вход контролируемого звена 4, выходной сигнал которого одновременно подается на вход блока фиксации максимального значения выходного сигнала звена 3, вход блока деления 5 и инвертирующий вход первого сумматора 6. По истечении времени t= τ схема запуска 1 останавливает формирование ступенчатого импульса с амплитудой ν (на вход контролируемого звена начинает поступать сигнал с нулевой амплитудой). По истечении времени контроля Tк схема запуска останавливает блок фиксации максимального значения выходного сигнала звена 3. При этом на выходе блока деления 5 будет сигнал, равный оценке коэффициента усиления k, а на выходе блока 9 - значение, равное оценке постоянной времени T контролируемого звена. Если оценки коэффициента усиления звена k и постоянной времени T получены для заведомо исправного звена, то производится компенсация этих сигналов изменением уставок Tном и kном путем минимизации сигналов на выходах блоков 13 и 10 соответственно. Полученные уставки принимаются в качестве номинальных параметров и остаются неизменными при диагностировании соответствующих звеньев, когда вместо заведомо исправного (эталонного) звена к устройству подключается контролируемое звено. Усилители 14 и 11 имеют коэффициенты усиления βT < 1 и βk < 1 и служат для получения опорных напряжений схем допускового контроля, определяющих максимальные допустимые отклонения контролируемых параметров ΔT и Δk. Схемы допускового контроля 10 и 13 представляют собой нелинейные блоки с релейной статической характеристикой, представленной на фиг. 4. Выходной сигнал блоков допускового контроля принимает значение 0 при нахождении контролируемого параметра в зоне допуска (-Δ, +Δ) и значение 1 при выходе параметра за пределы указанного интервала. Абсолютные значения границ зоны допустимых отклонений контролируемого параметра изменяются при изменении уставок Tном и kном. Допустимые относительные отклонения параметров T и K задаются коэффициентами усиления блоков 11 и 14:
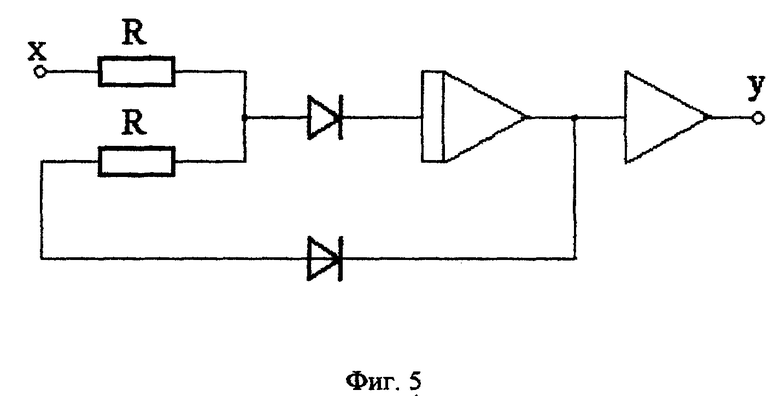
В качестве блока для фиксации максимального значения выходного сигнала звена использовалось устройство, представленное на фиг. 5 (Тетельбаум И.М., Шнейдер Ю. Р. 400 схем для АВМ.-М.:Энергия, 1978.-248 с., ил. С.120). Устройство предоставляет собой инерционное звено с относительно малой постоянной времени, на входе и в цепи обратной связи усилителя которого включены диоды. Интегрирующий усилитель работает лишь тогда, когда выполняется условие x > y. Во всех остальных случаях усилитель запоминает величину, бывшую в конце периода выполнения условия x > y. Когда x ≤ y, разрядки конденсатора цепи обратной связи не происходит, так как в замыкающей ее цепи включены навстречу друг другу два диода.
Использование одних и тех же электронных блоков как на этапе получения номинальных параметров, так и на этапе их контроля позволяет устранить ошибки контроля, связанные с неадекватностью номинальной модели, погрешностями блоков умножения, деления, усиления. Погрешность определения постоянной времени зависит от длительности τ тестового сигнала и времени контроля Tк. Зависимость этой погрешности была исследована путем цифрового моделирования на ПЭВМ устройства, представленного на фиг. 2.
В качестве оценки правильности контроля параметров контролируемых звеньев были взяты относительные погрешности определения параметров δ1 и δ2 :
где kном - номинальный коэффициент усиления заведомо исправного звена;
K - значение параметра звена, определенное в результате контроля;
Tном - номинальная постоянная времени заведомо исправного звена;
T - значение параметра звена, определенное в результате контроля.
На фиг. 6 представлена зависимость погрешности определения коэффициента усиления контролируемого звена k от отношения длительности тестового сигнала  к величине постоянной времени Tном при различных значениях длительности времени контроля Tk:δ1(τ), Tk = n Tном, на фиг. 7 - зависимость погрешности определения постоянной времени контролируемого звена T от отношения длительности тестового сигнала τ к величине постоянной времени Tном при различной длительности времени контроля Tk:δ2(τ), Tк = n Tном. Результаты моделирования подтверждают правильность рассуждений о наличии оптимальных значений τ и Tк, так, для правильного контроля параметров звена длительность тестового сигнала должна быть меньше времени контроля τ < Tк, длительность времени контроля Tк не зависит от постоянной времени звена и может быть практически произвольной.
к величине постоянной времени Tном при различных значениях длительности времени контроля Tk:δ1(τ), Tk = n Tном, на фиг. 7 - зависимость погрешности определения постоянной времени контролируемого звена T от отношения длительности тестового сигнала τ к величине постоянной времени Tном при различной длительности времени контроля Tk:δ2(τ), Tк = n Tном. Результаты моделирования подтверждают правильность рассуждений о наличии оптимальных значений τ и Tк, так, для правильного контроля параметров звена длительность тестового сигнала должна быть меньше времени контроля τ < Tк, длительность времени контроля Tк не зависит от постоянной времени звена и может быть практически произвольной.





Изобретение относится к контролю и диагностированию систем автоматического управления и их элементов. Технический результат изобретения заключается в расширении возможностей метода контроля параметров динамических систем и упрощении процесса контроля параметров системы. Предлагаемый способ контроля содержит следующую совокупность действий: определение номинальных параметров диагностической модели звена, определение значения коэффициента усиления исправного звена; определение значения постоянной времени этого звена; определение номинального значения постоянной времени звена; определение номинального значения коэффициента усиления звена; замену исправного звена на контролируемое; определение значений коэффициента усиления и постоянной времени для каждого контролируемого звена при неизменных уставках; для каждого контролируемого звена определяется отклонение постоянной времени от номинального значения; для каждого контролируемого звена определяется отклонение коэффициента усиления звена от номинального значения. Устройство контроля содержит схему запуска, блок формирования импульсного сигнала, схему фиксации максимального значения сигнала, контролируемое звено, первый блок деления, первый сумматор, первый усилитель, второй усилитель, второй блок деления, первую схему допускового контроля, второй усилитель, третий сумматор, вторую схему допускового контроля, третий усилитель. 2 с.п. ф-лы, 7 ил.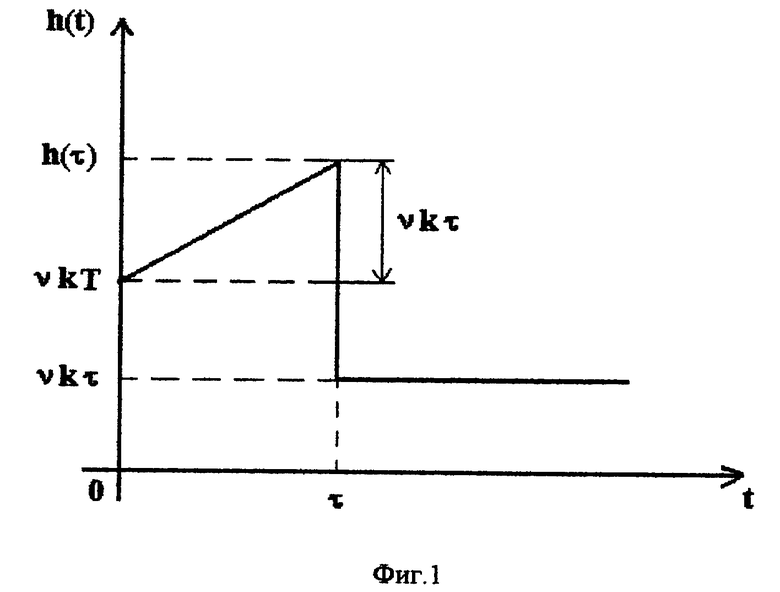
 , где y - выходной сигнал звена, k - коэффициент усиления, x - входной сигнал звена, T - постоянная времени, p - переменная Лапласа, предварительно определяют номинальные параметры контролируемого звена, для чего фиксируют время контроля звена Tк, подают на вход заведомо исправного звена прямоугольный импульс, длительность τ которого выбирают из соотношения τ < Tк, выходной сигнал звена делят на сигнал, численно равный произведению ν•τ, результат деления принимают за номинальное значение коэффициента усиления k звена, выходной сигнал звена в конце времени контроля вычитают из сигнала, численно равного максимальному значению выходного сигнала звена, полученную разность делят на произведение номинального значения коэффициента усиления k звена и сигнала, численно равного амплитуде ν, результат деления принимают за постоянную времени T заведомо исправного звена, из него вычитают напряжение уставки и, изменяя ее величину, добиваются минимальной по модулю разности между этими двумя сигналами, полученное напряжение уставки считают номинальным значением постоянной времени Tном звена, из сигнала, равного коэффициенту усиления k заведомо исправного звена, вычитают напряжение уставки и, изменяя величину уставки, добиваются минимальной по модулю разности между двумя сигналами, полученное напряжение уставки считают номинальным значением коэффициента усиления kном звена, замещают заведомо исправное звено контролируемым звеном, для контролируемого звена выполняют изложенные выше операции для определения параметров k и T, разность сигналов Δk между коэффициентом усиления контролируемого звена k и определенным ранее напряжением уставки, соответствующим kном, подают на первую схему допускового контроля, по наличию сигнала единичной амплитуды на выходе первой схемы допускового контроля принимают решение об отклонении параметра k от номинального значения, разность сигналов ΔT между постоянной времени контролируемого звена T и определенным ранее напряжением уставки, соответствующим Tном, подают на вторую схему допускового контроля, по наличию сигнала единичной амплитуды на выходе второй схемы допускового контроля принимают решение об отклонении параметра T от номинального значения.
, где y - выходной сигнал звена, k - коэффициент усиления, x - входной сигнал звена, T - постоянная времени, p - переменная Лапласа, предварительно определяют номинальные параметры контролируемого звена, для чего фиксируют время контроля звена Tк, подают на вход заведомо исправного звена прямоугольный импульс, длительность τ которого выбирают из соотношения τ < Tк, выходной сигнал звена делят на сигнал, численно равный произведению ν•τ, результат деления принимают за номинальное значение коэффициента усиления k звена, выходной сигнал звена в конце времени контроля вычитают из сигнала, численно равного максимальному значению выходного сигнала звена, полученную разность делят на произведение номинального значения коэффициента усиления k звена и сигнала, численно равного амплитуде ν, результат деления принимают за постоянную времени T заведомо исправного звена, из него вычитают напряжение уставки и, изменяя ее величину, добиваются минимальной по модулю разности между этими двумя сигналами, полученное напряжение уставки считают номинальным значением постоянной времени Tном звена, из сигнала, равного коэффициенту усиления k заведомо исправного звена, вычитают напряжение уставки и, изменяя величину уставки, добиваются минимальной по модулю разности между двумя сигналами, полученное напряжение уставки считают номинальным значением коэффициента усиления kном звена, замещают заведомо исправное звено контролируемым звеном, для контролируемого звена выполняют изложенные выше операции для определения параметров k и T, разность сигналов Δk между коэффициентом усиления контролируемого звена k и определенным ранее напряжением уставки, соответствующим kном, подают на первую схему допускового контроля, по наличию сигнала единичной амплитуды на выходе первой схемы допускового контроля принимают решение об отклонении параметра k от номинального значения, разность сигналов ΔT между постоянной времени контролируемого звена T и определенным ранее напряжением уставки, соответствующим Tном, подают на вторую схему допускового контроля, по наличию сигнала единичной амплитуды на выходе второй схемы допускового контроля принимают решение об отклонении параметра T от номинального значения.
| Устройство для измерения параметров звеньев систем регулирования | 1978 |
|
SU711545A1 |
| Устройство для диагностирования апериодических звеньев | 1978 |
|
SU781768A1 |
| Устройство для контроля параметров инерционных звеньев | 1979 |
|
SU873248A1 |
| Устройство для измерения параметров инерционных звеньев систем автоматического регулирования | 1980 |
|
SU877478A1 |
