Изобретение относится к транспортному машиностроению, в т.ч. нетрадиционному, а именно к движителю наземного, водного или воздушного транспортного средства, в т.ч. маховому.
Известен движитель, содержащий рабочий орган в виде диска и несущий элемент в виде штока, у которого диск закреплен на штоке под непрямым углом к последнему, а шток выполнен с возможностью поворота вокруг своей оси, колебательного движения вокруг нее и проходит через центр диска (см. авт. свид. СССР N 954330, публ. 30.08.82).
Универсальность движителя, отнесенного к водному транспорту, состоит в регулировке и соответствующем выборе амплитуды и частоты возвратно-поступательного движения штока и угла поворота его относительно своей продольной оси, чем обеспечивается выбор направления и величины тяги.
К существенному недостатку движителя относится жесткая связь рабочего органа с приводным валом (штоком).
Известен движитель, включающий привод с изменяемой геометрией, содержащий приводной вал, на котором установлена с возможностью вращения относительно приводного вала ступица с рабочим органом и упругие элементы, связывающие вал с рабочим органом, а также жестко установлена втулка, образующая цилиндрической поверхности которой непараллельна оси вращения приводного вала, а ось внутреннего отверстия ступицы, установленной на втулке, параллельна образующей цилиндрической поверхности втулки, а ступица установлена с возможностью вращения между сопряженными с ней дискообразными ведущими элементами, причем плоскости сопряжения дискообразных ведущих элементов со ступицей направлены под углом к оси приводного вала так, что ось внутреннего отверстия ступицы, установленной на втулке, перпендикулярна к этим плоскостям сопряжения (см. патент РФ N 2102250, кл. B 60 B 19/04, публ. 20.01.98).
Привод обеспечивает автоматическое увеличение проходимости без потери управляемости и сохранение автоматической регулировки повышения тягово-сцепных свойств ведущего колеса, за счет осуществления упругой, фрикционной и одновременно жесткой связи рабочего органа (колеса) c приводным валом как в вертикальной, так и в горизонтальной плоскостях.
К существенному недостатку привода относится невозможность плавной регулировки угла наклона рабочего органа (колеса) или амплитуды его поперечного осциллирующего движения при вращении приводного вала.
Техническим результатом является упрощение привода и управления, а также повышение универсальности.
Указанный результат достигается тем, что втулка и дискообразные ведущие элементы выполнены составными из внутренней и наружной подвижных между собой втулок и дисков ведущих и наружных, причем их оси вращения расположены под углом к взаимно пересекающимся образующим наружной и внутренней цилиндрической поверхности наружной втулки, параллельным осям пересечения и перпендикулярным к соответствующим взаимно пересекавшимся наружным и внутренним плоскостям дисков ведущих, связанных с наружной втулкой зацеплением вращения и вдоль осевого перемещения и упругими элементами с осью управления, а рабочий орган связан упругими элементами с автономным приводным валом.
Кроме того, рабочий орган закреплен на ступице таким образом, что плоскость его вращения расположена нормально к оси вращения приводного вала для увеличения угла маховых движении.
На чертеже схематически изображен движитель.
Движитель включает привод с изменяемой геометрией, содержащий приводной вал 1, на котором установлена с возможностью вращения относительно приводного вала ступица 2 с рабочим органом 3, например, диска с колесом и упругие элементы 4, связывающие вал с рабочим органом, а также жестко установлена втулка, образующая цилиндрической поверхности которой не параллельна оси 0-0 вращения вала, а ось 02-02 внутреннего отверстия ступицы 2, установленной на наружной втулке 5-1, параллельна образующей цилиндрической поверхности этой втулки. Ступица 2 установлена с возможностью вращения между сопряженными с ней дискообразными ведущими элементами, направленными под углом α к оси 0-0 вращения приводного вала.
Втулка и дискообразные ведущие элементы выполнены составными из внутренней 5 и наружной 5-1 подвижных между собой втулок и дисков ведущих 6-1 и 7-1 и наружных 6 и 7 так, что их оси вращения 01-01 и 02-02 расположены под некоторым углом α с взаимно пересекающимися образующими наружной и внутренней цилиндрической поверхности наружной втулки 5-1, параллельными осями пересечения 01-01 и 02-02 и перпендикулярными к соответствующим взаимно пересекающимся наружными и внутренними плоскостям дисков ведущих 6-1 и 7-1, связанных с наружной втулкой 5-1 зацепления вращения и вдоль осевого перемещения и упругими элементами 4 с осью управления 10, а рабочий орган 3 может быть закреплен на ступице 2 нормально или к оси 0-0 вращения приводного вала 1 или к оси 02-02 вращения ступицы 2 и связан упругими элементами 4 с автономным приводным валом 11 корпуса движителя 12. Диск наружный 7 закреплен на приводном валу жестко, а диск 6 - зацеплением вращения и подпирается упругим элементом 4 с возможностью вдоль осевого перемещения регулировочной гайкой 6 и фиксацией контргайкой 9. Таким образом, общий вид движителя представляет жестко установленную на приводном валу 1 наружную катушку (на чертеже заштрихована правосторонней штриховкой), состоящую из наружных дисков 6 и 7 и внутренней втулки 5 с упруго подвижным основанием в виде наружного диска 6, на втулке 5 которой размещена аналогичная внутренняя катушка (на чертеже заштрихована левосторонней штриховкой), состоящая из внутренних дисков ведущих 6-1 и 7-1 наружной втулки 5-1 с упруго подвижным основанием в виде диска ведущего 6-1, на наружной втулке 5-1 которой установлена на элементах качения, например шариках, роликах и т.п., ступица 2 с рабочим органом 3, плоскость вращения которого может быть установлена нормально как к оси 0-0 вращения приводного вала 1 с большой амплитудой осцилляции, что эффективнее для движителя, работающего в сплошной среде (вода-воздух), так и нормально к оси 02-02 вращения ступицы 2, что эффективнее для движителя наземного транспорта.
Работа движителя, например, наземного транспортного средства с рабочим органом в виде диска с колесом 3 осуществляется от общего привода (на чертеже не показан), с подачей Mкр на приводной вал 1 - колесо катится с нормальной (прямолинейной) геометрией качения. Для увеличения силы тяги Mкр одновременно подают и на автономный приводной вал 11. При взаимодействии колеса с грунтом (или иного рабочего органа с внешней средой) силы, действующие на колесе, затормаживают рабочий орган 3 со ступицей 2, а приводной вал 1 с наружной катушкой (см. правостороннюю штриховку на чертеже), продолжая вращение, действуют на ступицу 2 через внутреннюю катушку (см. левостороннюю штриховку на чертеже), которая удерживает ступицу 2 от провертывания через упругий элемент 4 осью управления 10, путем поворота которой на 180o плавно меняется значение угла от α до 90o (к оси 0-0 вращения приводного вала 1) и с последующим поворотом на 180o в том же направлении - плавно меняется значение угла от 90o до угла α в противоположном направлении, осуществляя управление движением колеса движителя наземного транспортного средства от автономного приводного вала 11, при условии, что рабочий орган (колесо) 3 закреплен на ступице 2 с плоскостью вращения, расположенной нормально к оси 02-02 вращения ступицы 2 (на чертеже положение F штриховой со стрелкой линией). При включении Мкр на приводной вал 1 отклоненное на некоторый угол колесо 3 автоматически увлекается во вращение плоскостями сопряжения внутренней катушки в направлении F, и качение происходит по криволинейной синусоидальной формы траектории, и к силам сцепления и трения между колесом и грунтом добавляется сила бокового сдвига призмы грунта. Т.к. в проекции на вертикальную плоскость наклоненное колесо дает эллипс, то в других точках траектории качения повышенное тяговое усилие реализуется за счет качения эллипса, аналогично мягко шагающему движителю с шагом, равным длине большой оси эллипса, обуславливая загребающий эффект в вертикальной плоскости, чем достигается управление регулировкой автоматического повышения тягово-сцепных свойств колеса (или другого рабочего органа). Ступица 2, ведомая плоскостями сопряжения внутренней катушки, автоматически становится ведомой плоскостями сопряжения наружной катушки, жестко связанной с приводным валом 1, поэтому колесо 3 производит силовые движения в горизонтальной плоскости, вдоль и относительно оси 0-0 приводного вала 1 с силами F (см. чертеж вверху), производя на грунте (или окружающей среде) загребающие (или маховые) и выталкивающие силы, дополнительно к указанным выше, направленным назад и вверх, относительно направления движения, чем достигается управление регулировкой автоматического увеличения проходимости колеса.
Управляемое движение торможения такого колеса лишено недостатков известного торможения потому, что основано на "управлении регулировкой автоматического повышения тягово-сцепных свойств колеса", описанных выше, при условии отсутствия Мкр на колесе, а при использовании в качестве движущей силы количества инерционного движения всего транспортного средства, т.е. при смене источника движения, характер и направление движущих сил между колесом и грунтом меняется на противоположный: тягово-сцепные преобразуются (не пропадая совсем) в тормозяще-сцепные, которые является более простой, надежной и эффективной формой торможения в любых условиях движения.
Для движителя, работающего в сплошной среде (вода-воздух) с рабочим органом в виде винта гребного, или воздушного, или крыла, в т.ч. диска, возможно тарельчатого и т.п., закрепленного на ступице 2 с плоскостью вращения, расположенной нормально к оси 0-0 вращения приводного вала 1 (см. чертеж) для увеличения угла маховых движений, их работа управляется регулировкой скорости вращения (оборотов) приводных валов 1 и 11 или частотой осцилляции рабочего органа 3, обуславливая регулировку величины тяги, а изменение угла наклона рабочего органа 3 относительно корпуса движителя 12 или амплитуды синусоидального движения с приводом от автономного приводного вала 11 изменяет направление вектора тяги.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД С ИЗМЕНЯЕМОЙ ГЕОМЕТРИЕЙ | 1996 |
|
RU2102250C1 |
| СПОСОБ ОБРАЗОВАНИЯ МАХОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ В ВИДЕ МАШУЩЕГО ВИНТА | 2010 |
|
RU2482010C2 |
| САМОХОДНОЕ КРЕСЛО ДЛЯ ИНВАЛИДОВ | 1991 |
|
RU2033125C1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ | 1992 |
|
RU2038248C1 |
| ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА (ДТС) | 2014 |
|
RU2582639C1 |
| МАШИНА ДЛЯ ДОБЫЧИ ЛАКРИЧНОГО СЫРЬЯ | 1999 |
|
RU2163431C1 |
| Стенд для испытания муфт | 1990 |
|
SU1763925A1 |
| ПРОПУЛЬСИВНЫЙ КОМПЛЕКС ТОРПЕДЫ, СПОСОБ РАБОТЫ И ВАРИАНТЫ ДВИЖИТЕЛЯ | 2020 |
|
RU2757339C1 |
| Приспособление для поддержания постоянства скорости вращения двигателя внутреннего горения при пуске в ход инерционным стартером | 1932 |
|
SU47980A1 |
| УПРАВЛЯЕМАЯ ПОДВЕСКА ДВУХКОЛЕСНОГО БЛОКА | 2020 |
|
RU2740522C1 |
Изобретение относится к транспортному машиностроению, в частности к движителям наземного, водного или воздушного транспортного средства. Движитель, включающий привод с изменяемой геометрией, содержит приводной вал, на котором установлена с возможностью вращения относительно приводного вала ступица с рабочим органом, а также жестко установлена втулка. Ступица установлена с возможностью вращения между сопряженными с ней дискообразными ведущими элементами. Втулка и дискообразные ведущие элементы выполнены составными из внутренней и наружной подвижных между собой втулок и дисков, ведущих и наружных. Оси вращения дисков расположены под углом к взаимно пересекающимся образующим наружной и внутренней цилиндрических поверхностей наружной втулки, параллельным осям пересечения и перпендикулярным соответствующим взаимно пересекающимся наружным и внутренним плоскостям ведущих дисков. Ведущие диски связаны с наружной втулкой зацеплением вращения и вдоль осевого перемещения и упругими элементами с осью управления. Рабочий орган связан упругими элементами с автономным приводным валом. Достигается упрощение конструкции привода и управления движителем. 1 з.п. ф-лы, 1 ил.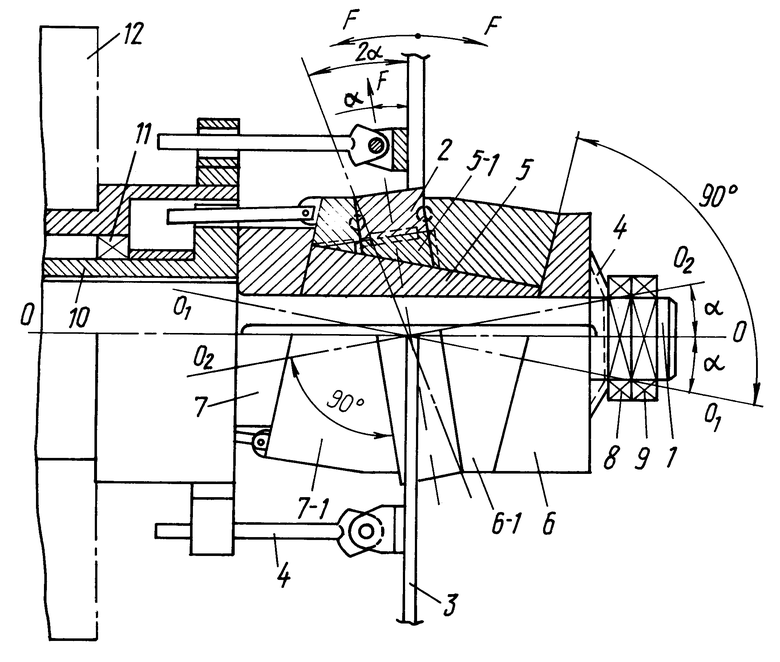
с осью управления, а рабочий орган связан упругими элементами с автономным приводным валом.
| ПРИВОД С ИЗМЕНЯЕМОЙ ГЕОМЕТРИЕЙ | 1996 |
|
RU2102250C1 |
| Движитель | 1979 |
|
SU954330A1 |
| SU 755620 A, 15.08.80. | |||
